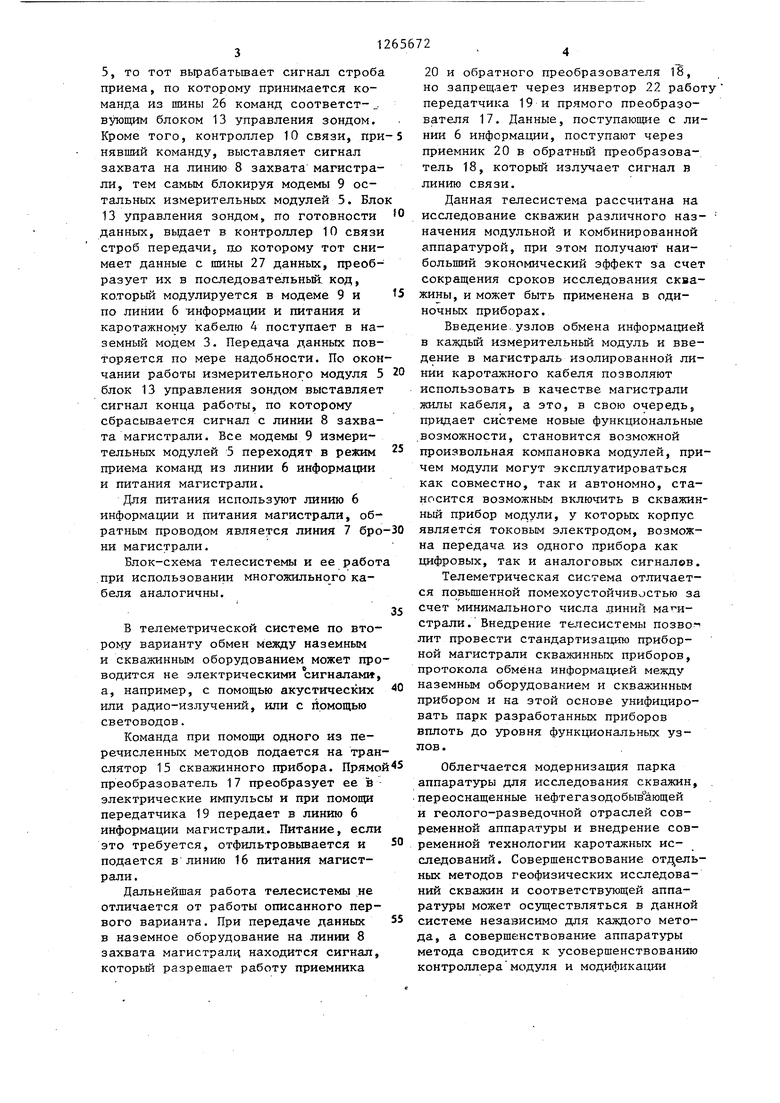
Изобретеине относится к геофизическому приборост)оению, в частности к каротажным телеметрическим системам и к модульной и комбинированной скважинной аппаратуре, Целью изобретения является расширение функциональных возможностей телеметрической системы для каротажа скважин, повьшение ее надежности и помехоустойчивости. На фиг.1 представлена блок-схема телеметрической системы по первому варианту; на фиг.2 - то же, по второму варианту; на фиг.З - блок-схема транслятора информации; на фиг.4 блок-схема контроллера связи; на фиг.5 - временная диаграмма работы телеметрической системы. I Телеметрическая система по первому варианту (фиг.1) содержит в наземной части контроллер 1, средства 2 отображения и регистрации, наземньй модем 3, каротажный кабель 4, в скважинной части - измерительные модули 5, объединенные с помощью приборной магистрали, состоящей из линий информации и питания 6, брони 7, захвата магистрали 8. Измерительные модули 5 содержат модем 9, контроллер 10 связи, к которому шиной 11 управления и шиной 12 информации подключен блок 13 управления зондом, к которому подключены датчики и исполнительные устройства 14 измерительного модуля 5. Линия 6 информации и питания является такжб и линией питания измерительных модулей скважинного прибора Телеметрическая система по второму варианту (фиг.2) содержит в наземной части контроллер 1, средства 2 отображения и регистрации, наземный модем 3, каротажный кабель 4, к которому подключена скважинная часть содержащая измерительные модули 5, соединенные с помощью приборной магистрали, состоящей из линий инфорf ai JH 6, брони 7, захвата магистрали |8. Измерительные модули 5 содержат модем 9, контроллер 10 связи, подсо единенный при помощи шины 11 управл ния и пмны 12 информации к блоку 13 управления зондом, к которому подключены датчики и исполнительные, .уст ройства 14 измерительного 5, В.данном варианте в скважинный прибор введен транслятор 15, к котором подключена приборная магистраль, со ержащая кроме перечисленного, и инию 16 питания. Транслятор (фиг.З) содержит пряой 17 и обратный 18 преобразователи нформации, передатчик 19 и приемник 20, сетевой фильтр 21 и инвертор 22. Контроллер связи (фиг.4) содержит сдвиговый регистр 23, дешифратор 24 дреса, устройство 25 управления и , соединен с блоком управления зондом при помощи шины- 12 информации, соержащей шины команд 26, и данных 27 и управления 11, содержащей проводы строба приема 28, строба передачи 29, конца работы 30. Информация по линии информации передается в виде сигналов, соответствующих принятому виду модуляции. Модем 9 вьшолняет демодуля.цию принимаемой информации и преобразует ее в двоичный код. При передаче информации в наземное оборудование в модеме 3 проводится модуляция двоичного кода. Кроме того, при наличии сигнала на линии захвата магистрали сигнал с линии информации модемом 9 не воспринимается . , Контроллер 10 связи преобразует последовательньй двоичньй код в параллёлъньй и наоборот и, кроме того, управляет работой линии 8 захвата магистрали. Блок 13 управления зондом может быть выполнен как по жесткой логической схеме, так и программируемым, с применением микропроцессорных уст-: ройств, и предназначен для управления датчиками и исполнительными механизмами 14, преобразования аналоговых сигналов в двоичньй код и наоборот, первичной обработки информации. Телеметрическая система по первому варианту работает следующим Убразом. Команда из наземной части теле- системы поступает по каротажному кабелю 4 и линии 6 информации и питания одновременно, во все модемы 9 измерительных модулей 5, где преобразуется, если на линии 8 захвата магистрали нет сигнала, в последовательньй цифровой код, которьй подается в контроллеры 10 связи. Команда в контроллерах 10 связи преобразуется в параллельньй код, которьй проверяется и дешифраторе 24 адреса и, если принятая команда принадлежит одному из измерительных модулей 5, то тот вырабатьшает сигнал строба приема, по которому принимается команда из шины 26 команд соответст- . вующим блоком 13 управления зондом. Кроме того, контроллер 10 связи, при нявший команду, выставляет сигнал захвата на линию 8 захвата магистрали, тем самым блокируя модемы 9 остальных измерительных модулей 5. Бло 13 управления зондом, по готовности данных, выдает в контроллер 10 связи строб передачи5 до которому тот снимает данные с шины 27 данных, преобразует их в последовательный, код, ко.торьй модулируется в модеме 9 и по линии 6 информации и питания и каротажному кабелю 4 поступает в наземный модем 3. Передача данных повторяется по мере надобности. По окон чании работы измерительного модуля 5 блок 13 управления зондом выставляет сигнал конца работы, по которому сбрасьшается сигнал с линии 8 захвата магистрали. Все модемы 9 измерительных модулей 5 переходят в режим приема команд из линии 6 информации и питания магистрали. Для питания используют линию 6 информации и питания магистрали, обратным проводом является линия 7 бро ни магистрали. Блок-схема телесистемы и ее работ при использовании многожильного кабеля аналогичны. В телеметрической системе по второму варианту обмен между наземным и скважинным оборудованием может про водится не электрическими сигналами. а, например, с помощью акустических или радио-излучений, или с йомощью световодов. Команда при помощи одного из перечисленных методов подается на тран слятор 15 скважинного прибора. Прямо преобразователь 17 преобразует ее ie электрические импульсы и при помощи передатчика 19 передает в линию 6 информации магистрали,. Питание, если это требуется, отфильтровьшается и подается в линию 16 питания магистрали. Дальнейшая работа телесистемы не отличается от работы описанного первого варианта. При передаче данных в наземное оборудование на линии 8 захвата магистрали находится сигнал, который разрешает работу приемника 20 и обратного преобразователя 18, но запрещает через инвертор 22 работу передатчика 19 и прямого преобразователя 17. Данные, поступающие с линии 6 информации, поступают через приемник 20 в обратный преобразователь 18, который излучает сигнал в линию связи. Данная телесистема рассчитана на исследование скважин различного наз- начения модульной и комбинированной аппаратурой, при этом получают наибольший экономический эффект за счет сокращения сроков исследования скважины, и может быть применена в одиночных приборах. Введение.узлов обмена информацией в каждый измерительный модуль и введение в магистраль изолированной линии каротажного кабеля позволяют использовать в качестве магистрали жилы кабеля, а это, в свою очередь, придает системе новые функциональные .возможности, становится возможной произвольная компановка модулей, причем модули могут эксплуатироваться как совместно, так и автономно, станосится возможным включить в скважинный прибор модули, у которых корпус является токовьм электродом, возможна передача из одного прибора как цифровых, так и аналоговых сигналов. Телеметрическая система отличается повьппенной помехоустойчивостью за счет минимального числа 1{иний ма истрали. Внедрение телесистемы позво лит провести стандартизацию приборной магистрали скважинных приборов, протокола обмена информацией между наземным оборудованием и скважинным прибором и на этой основе унифицировать парк разработанных приборов вплоть до уровня функциональньтх узлов. Облегчается модернизация парка аппаратуры для исследования скважин, . переоснащенные нефтегазодобывающей и геолого-разведочной отраслей современной аппаратуры и внедрение современной технологии каротажных исследований. Совершенствование отдельных методов геофизических исследований скважин и соответствующей аппаратуры может осуществляться в данной системе независимо для каждого метода, а совершенствование аппаратуры метода сводится к усовершенствованию контроллерамодуля и модификации программного обеспечения наземной Части телесистемы. Формула изобрете 1. Телеметрическая система для каротажа скважин,,состоящая из наземной и скважинной частей, соединенных каротажньм кабелем, в наземную часть которой входят контроллер со средствами регистрации и отображения информации и модем для связи контроллера со скважингйлм прибором, а в скважиннзпо часть - измерительные модули, каждый из которых содержит бло управления зондом с подключенными к нему датчиками и исполнительными устройствами, объединенные в скважин ньй прибор при помощи приборной магистрали, отличающаяся тем, что, с целью расширения функци ональных возможностей телесистемы, повышения ее надежности и помехоустойчивости, в приборную магистраль введены линия захвата магистрали и изолированная от корпуса прибора ли 1|ия брони каротажного кабеля, в каж дьй измерительный модуль введены контроллер связи с наземной частью телесистемы и модем, который своим первым входом - выходом подключен к двунаправленной линии информации и питания магистрали, являющейся продолжением жилы каротажного кабеля вторым входом - выходом модем пoдkлючен к первому двунаправленному входу контроллера связи, второй дву . направленный вход контроллера связи подключен к линии захвата магистрал и к входу модема, третий двунаправленный вход контроллера связи через шину информации подключен к блоку управления зондом, которьй подключе через управляющую шину к четвертому двунаправленному входу контроллера связи. 2, Телеметрическая система для каротажа сквалшн, состоящая из наземной и скважинной частей, соединенных каротажным кабелем, в наземную часть которой входят контроллер со средствами регистрации и отображения информации и модем для связи контроллера со скважинным прибором, а в скважинную часть - измерительные , модули, каждый из которых содержит блок управления зондом с подключенными к нему датчиками и исполнительными устройствами, объединенные в скважинньй прибор при помощи приборной магистрали, отличающаяся тем, что, с целью расширения функциональных возможностей телесистемы, повьшения ее надежности и помехоустойчивости, в скважинный прибор введен транслятор информации, в приборную магистраль введены линия питания, линия захвата магистрали и изолированная от корпуса прибора линия брони каротажного кабеля, а в каждьй измерительньй модуль введены контроллер связи с наземной частью системы и модем, причем транслятор одним входом - выходом подключен к коротажному кабелю, а другим входомвыходом подключен к информационной линии магистрали,к которой также подключен первьйвход -выход модема, выход транслятора подключен к линий питания, а вход - к линии захвата магистрали, которая подключена к первому входу - выходу контроллера связи и к входу модема, которьй своим вторым входом - выходом подключен к второму входу - выходу контроллера связи, которьй третьим входом - выходом через двунаправленную шину информации подключен к первому входу - выходу блока управления зондом, последний через двунаправленную - шину управления подключен к четвертому входу - выходу контроллера связи.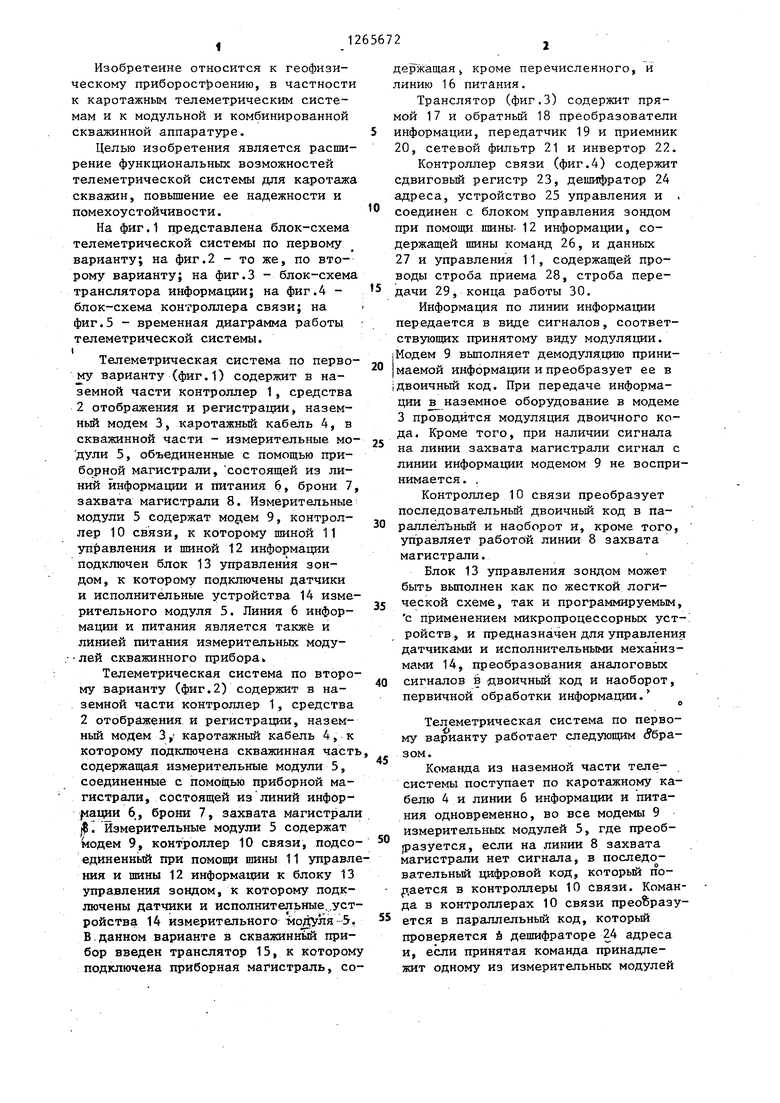

| название | год | авторы | номер документа |
|---|---|---|---|
| Телеметрическая система для каротажа скважин | 1983 |
|
SU1122995A1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ СКВАЖИННОЙ ТЕЛЕМЕТРИИ | 2010 |
|
RU2529595C2 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖА СКВАЖИН, ОБСАЖЕННЫХ МЕТАЛЛИЧЕСКОЙ КОЛОННОЙ | 2011 |
|
RU2488852C1 |
| Устройство для каротажа скважин, обсаженных металлической колонной | 2011 |
|
RU2630991C1 |
| Устройство для электрического каротажа через металлическую колонну | 2011 |
|
RU2631099C2 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 1997 |
|
RU2140539C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ЧЕРЕЗ МЕТАЛЛИЧЕСКУЮ КОЛОННУ | 2011 |
|
RU2508561C2 |
| СПОСОБ НАЗЕМНОГО ПРИЕМА-ПЕРЕДАЧИ ИНФОРМАЦИИ В ПРОЦЕССЕ БУРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2527962C1 |
| Комплексно-комбинированный прибор для каротажа скважин | 1983 |
|
SU1087939A1 |
| Система передачи данных для буровых скважин | 1978 |
|
SU1087082A3 |

Телеметрическая система для каротажа скважин относится к области геофизического приборостроения, в частности к каротажным телеметрическим системам и к модульной и комбинированной аппаратуре. Целью изобретения является расширение функциональных возможностей телесистемы, повьшение ее надежности и помехоустойчивости. Телесистема состоит из наземной и скважинной частей, соедйденных каро.тажным кабелем, В наземную часть телесистем входят контроллер со средствами регистрации и отображения информации и модем для связи контроллера со скважинным прибором, В скважинную часть входят измерительные модули, каждый из которых содержит блок управления зондом с подключенными к нему датчиками и исполнительными устройствами, объединенные в скважинньй прибор при помощи приборной магистрали. Для достижения цели изобретения в приборную магистраль введены линии захвата магистрали и изолированная от корпуса прибора линия брони каротажного кабеля, а в каждый измерительный модуль введены контроллер связи с наземной частью телесистемы и модем. Модем своим первым входом - выходом подключен к двунаправленной линии информации и питания магистрали, являющейся продолжением жилы каротажного кабеля. Вторым входом - выхйдом мос дем подключен к первому двунаправS ленному входу контроллера связи, вто(Л рой дв-унаправленньш вход контроллера связи подключен к линии захвата магистрали и к входу модема. Третий двунаправленный вход контроллера связи через шину информации подключен к блоку управления зондомj которьй ю .Подключен через управляющую шину к О5 четвертому двунаправленному входу контроллера связи. По второму варисд анту в скважинный прибор введен транО5 слятор информации, в приборную ма ГО гистраль введены линия питания, линия захвата магистрали и изолированная от корпуса прибора линия брони каротажного кабеля, Транслятор одним входом - выходом подключен к каротажному кабелю, .а другим входом - выходом .- к информационной линии магистрали, к которой подсоединен первый вход - выход модема. Выход транслятора подключен к линии питания, а вход - к линии захвата магистрали. 2 с,п, ф-лы, 5 ил,
| Комплексно-комбинированный прибор для каротажа скважин | 1980 |
|
SU911411A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2008 |
|
RU2379694C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
