N3 vj
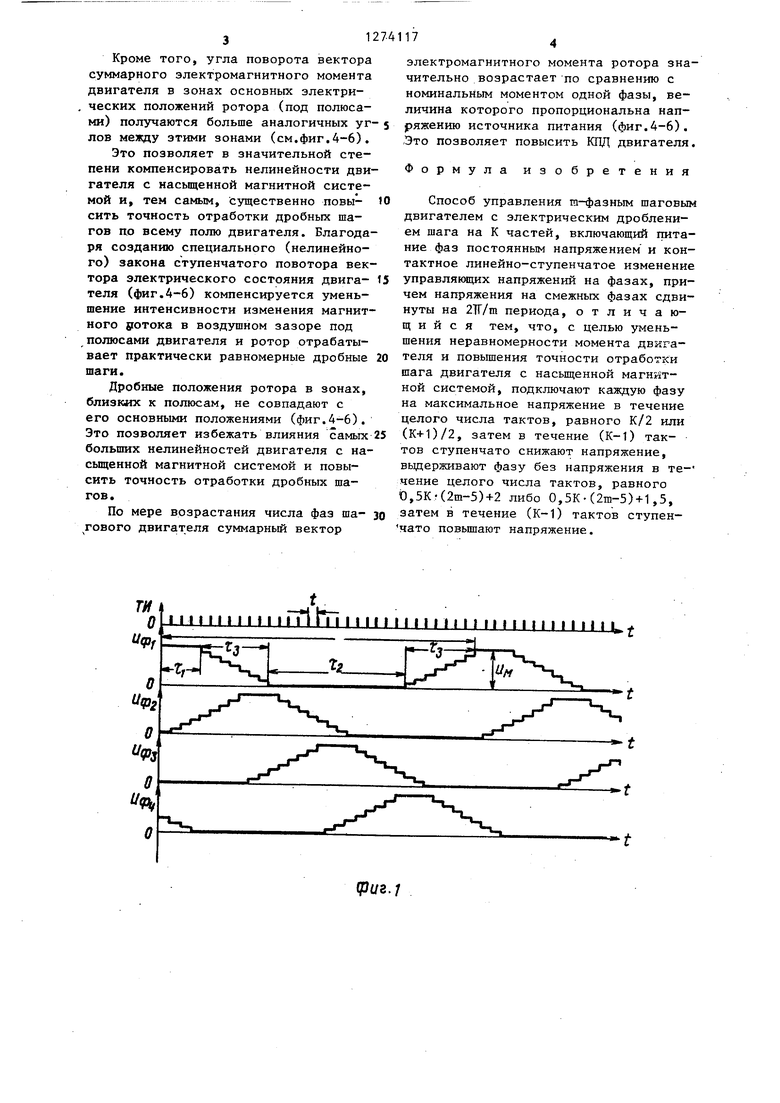
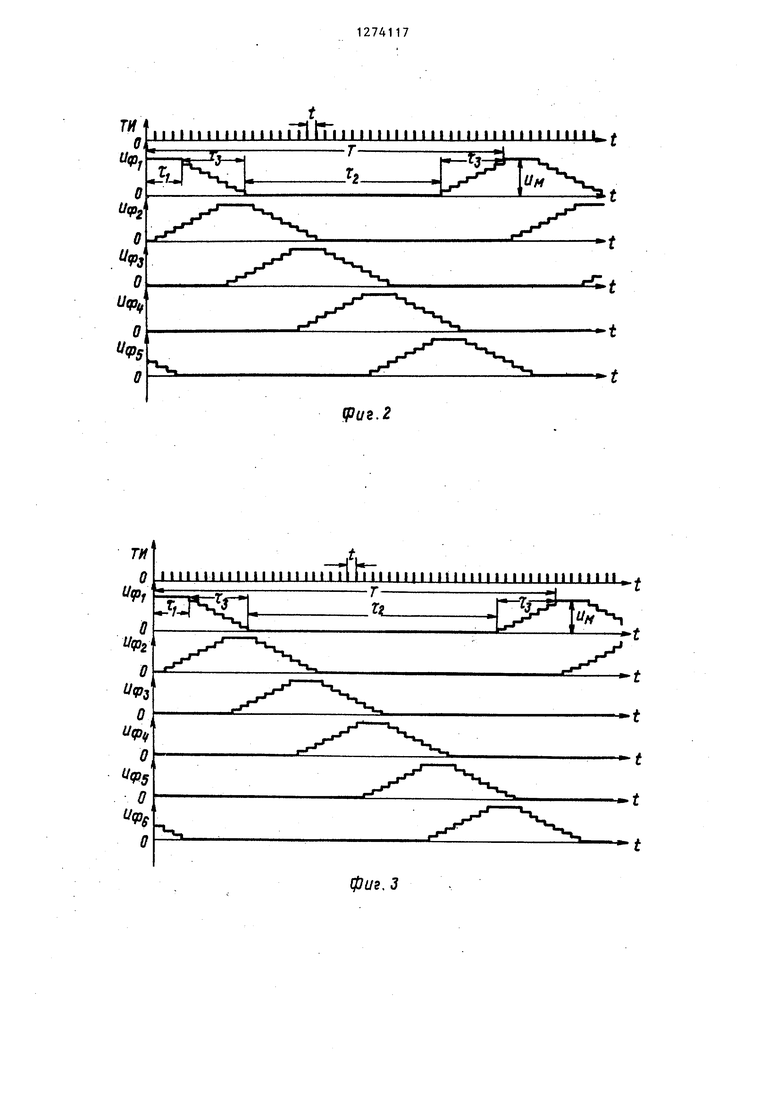
4 Изобретение относится к области управления электрическими машинами и может быть использовано для управления шаговым двигателем (ШД) с различным числом фаз. На фиг.1 показаны временные диаграммы управляющих напряжений для 4фазного двигателя при коэффициенте дробления основного шага К 8; на фиг.2 - то же, для 5-фазного двигателя; на фиг.З - то же, для 6-фазного двигателя; на фиг.4 - положения и величины суммарных векторов момента для 4-фазного двигателя при К 8; на фиг.З - то же, для 5-фазного днигателя; на фиг.6 - то же, для 6-фазного двигателя. Способ управления т-фазным шаговым двигателем в режиме дробления ша га заключается в следующем. Например, при управлении четырехфазным шаговым двигателем с коэффициентом дробления К 8 (фиг.1) на каждой фазе в течение четырех тактов поддерживается максимальное напряжение и . После этого в течение последующих семи тактов по одной ступе ни, равной , напряжение уменьшается до нуля и поддерживается в этом состоянии в течение четырнадцати так тов. Затем в течение семи последних тактов данного периода по одной ступени, также равной U /8, напряжение увеличивается до максимального значения И. Далее процесс повторяется аналогично описанному. Благодаря этому за каждьй период повторения периодических линейно-сту пенчатых фазных напряжений, сдвинуты друг относительно друга на 2F/m периода, суммарный вектор электромагнитного момента осуществляет вокруг своей оси ступенчатый поворот на 2 ЛГ рад (фиг.4). В соответствии с эти ротор двигателя на каждом обороте вектора момента отрабатывает 32 дроб ных шага. При управлении предлагаемым способом пя тифа зным шаговым Двигателем с коэффициентом дробления К 8 (фиг.2) поддержание каждой фазы под максимальным напряжением производится в течение четырех тактов, в отключенном состоянии - 22-х тактов, а ступенчатое его увеличение ил уменьшение - соответственно по 7 так тов, В соответствии с этим ротор дв гателя за один полный оборот вектор момента делает 40 дробных шагов (фиг.З). При управлении предлагаемым способом шестифазным шаговым двигателем с коэффициентом дробления К 8 (фиг.З) каждая фаза под максимальным напряжением поддерживается в течение четырех тактов, под нулевым - 30 тактов, а ступенчатые увеличения или уменьшения осуществляется соответственно в течение 7 тактов. Благодаря этому ротор двигателя за один полный оборот вектора момента делает 48 дробных шагов (фиг.6). Как видно из представленных на фиг.1-3 временных диаграмм, в общем случае при данном способе управления т-фазным шаговым двигателем с коэффициентом дробления период повторения линейно-ступенчатого управляющего напряжения каждой фазы определяется выражением Т m-K-t, где t - длительность одного такта квантования. При этом продолжительность времени питания каждой фазы максимальным напряжением определяется выражением КК-1-1 -t при четных К; -г-t при нечетных К, а продолжительность отключенного состояния каждой фазы - выражением 0,ЗК (2т-5)+2 при четных К; 0,ЗК(2т-3)+1,3 при нечетных К. Продолжительность времени линейно-ступенчатого подъема или спуска напряжения каждой фазы определяется формулой t ::(К - 1) t. При использовании способа дробления шага распределение вектора суммарного электромагнитного момента т-фазного двигателя по полю получается 2т-угольным (достаточно близким круговому распределению - см. фиг.4-6) в отличие от известных способов, обеспечивающих т-угольное распределение. При этом многоугольники описаны по окружностям, радиус которых пропорционален максимальному напряжению U (напряжению источника питания). Эта особенность позволяет существенно повысить плавность (равномерность) хода двигателя. Кроме того, угла поворота вектора суммарного электромагнитного момента двигателя в зонах основных электрических положений ротора (под полюсами) получаются больше аналогичных уг лов между этими зонами (см.фиг,4-6), Это позволяет в значительной степени компенсировать нелинейности двигателя с насыщенной магнитной системой и, тем самым, существенно повысить точность отработки дробных шагов по всему полю двигателя. Благодаря созданию специального (нелинейного) закона ступенчатого повотора вектора электрического состояния двигателя (фиг.4-6) компенсируется уменьшение интенсивности изменения магнитного ротока в воздушном зазоре под полюсами двигателя и ротор отрабатывает практически равномерные дробные шаги. Дробные положения ротора в зонах, близких к полюсам, не совпадают с его основными положениями (фиг.4-6). Это позволяет избежать влияния самых больших нелинейностей двигателя с насьш1енной магнитной системой и повысить точность отработки дробных шагов. По мере возрастания числа фаз шагового двигателя суммарный вектор электромагнитного момента ротора значительно возрастает по сравнению с номинальным моментом одной фазы, величина которого пропорциональна напряжению источника питания (фиг.4-6). Это позволяет повысить КПД двигателя. рмула изобретения Способ управления га-фазным шаговым двигателем с электрическим дроблением шага на К частей, включающий питание фаз постоянным напряжением и контактное линейно-ступенчатое изменение управляющих напряжений на фаэах, причем напряжения на смежных фазах сдвинуты на 2ТГ/т периода, отличающийся тем, что, с целью уменьшения неравномерности момента двигателя и повышения точности отработки шага двигателя с насьш;енной магнитной системой, подключают каждую фазу на максимальное напряжение в течение целого числа тактов, равного К/2 или (К+1)/2, затем в течение (К-1) тактов ступенчато снижают напряжение, вьщерживают фазу без напряжения в течение целого числа тактов, равного 0,5К-(2т-5)н-2 либо 0,5К-(2т-5) + 1,5, затем в течение (К-1) тактов ступеннато повьш:ают напряжение.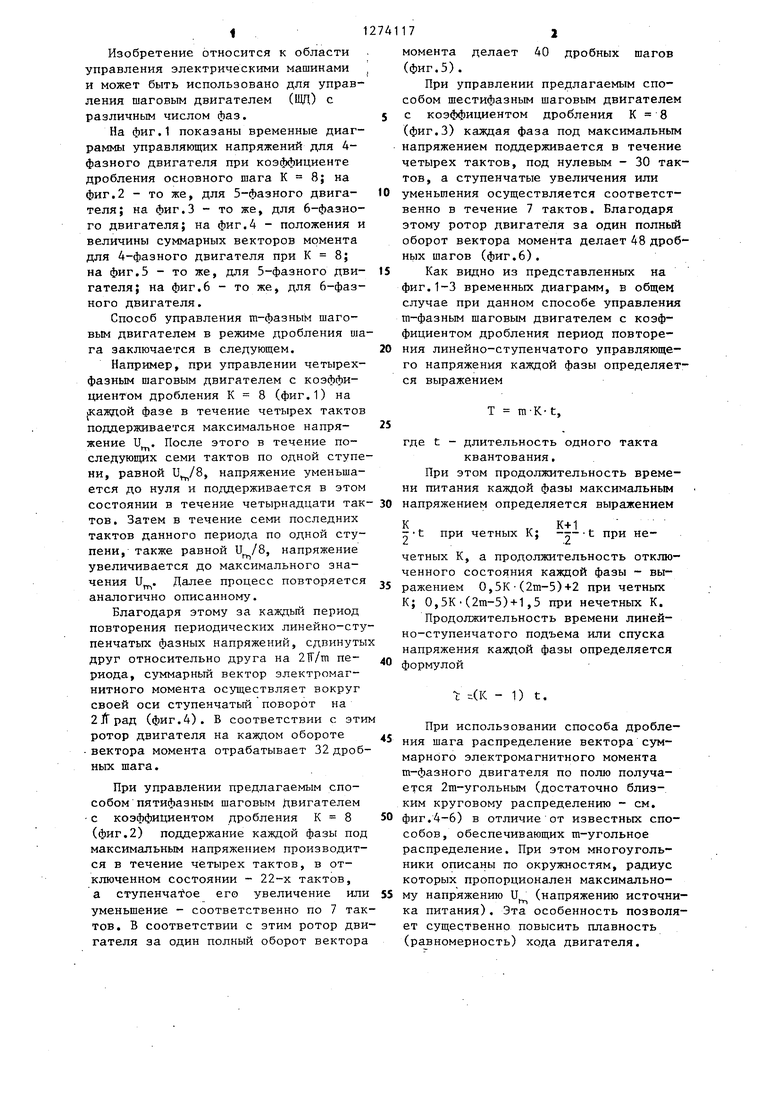
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления четырехфазным шаговым двигателем с электрическим дроблением шага | 1986 |
|
SU1372588A1 |
| Устройство для программного управления @ -фазным шаговым двигателем | 1987 |
|
SU1529179A1 |
| Способ управления четырехфазным шаговым двигателем с электрическим дроблением шага | 1988 |
|
SU1552341A1 |
| Способ управления двухфазным шаговым двигателем | 1988 |
|
SU1610592A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1983 |
|
SU1149367A2 |
| Устройство для управления @ -фазным шаговым двигателем | 1982 |
|
SU1073872A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1980 |
|
SU909784A1 |
| Способ управления двухфазным шаговым двигателем | 1988 |
|
SU1628178A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU964951A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU957404A2 |

Изобретение относится к управлению электрическими машинами. Цель изобретения - уменьшение неравномерности момента двигателя и повьшзение точности отработки шага т-фазного шагового двигателя с электрическим дроблением шага на К частей. При данном способе управления период повторения линейно-ступенчатого управляющего напряжения каждой фазы двигателя определяется выражением Т tnKt, где t длительность одного такта квантова-. ния. При использовании этого способа дробления шага распределение вектора суммарного электромагнитного момента т-фазного двигателя по полю полу- чается 2т-угольным в отличие от известных способов, обеспечивающих гаугольное распределение. При этом многоугольники описаны по окружностям, радиус которых пропорционален максимальному напряжению источника питания. Эта особенность позволяет су(Л щественно повысить плавность (равномерность) хода двигателя. 6 ил.
ulbi I И t и П И I I :;j И I I М I I I I I I I М
(риг.1 I t I И I I I I i П ,
11111111111111 i ГП i 11111111111111111 и 1111 и L
.
(риг.2 I I II I 1111 I I I I и и М I 1 им и I I и I I 1111 и - - .Г
фиг. 3 t i 1 I II М Ш I I I II . .. и Т,
12
а
/7
18 Здз.
Г9
22 23 2
37
3S
28
27
Чф
ZS
фиг. 5
| Авторское свидетельство СССР № 915200, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым электродвигателем | 1971 |
|
SU480227A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
