1
Изобретение относится к производственно-техническому обеспечению сельского хозяйства, в частности к способам и устройствам для оценки отклонения рабочих органов сельскохозяйственных агрегатов от заданного направления движения.
Цель изобретения - повышение точности оценки путем исключения влияния ошибок водителя на исследуемый процесс.
. Отклонение рабочего органа сельскохозяйственного агрегата от заданного направления движения определяв ся по перпендикуляру к направлению вектора абсолютной скорости точки на агрегате, сохраняющей заданное направление движения.
При выполнении агротехнических операций (посева, междурядной обработки и др.), при возделывании,например, пропашных культур тракторист I осуществляет контроль сохранения агрегатом заданного направлени:я движения, ориентируясь по передней крок ке гусеницы - у гусеничных и передним колесом - у колесных тракторов. Поэтому можно положить, что заданное направление движения сохрани ет точка пересечения продольной оси трактора с поперечной осьЮ;, проходящей через центры передних колес (у гусеничных тракторов передним колесом является натяжное колесо), В кап равлении указанного перпендикуляра величина отклонения оценивается ап- гебраической суммой из двух слагаемых. Одним слагаемым является отклонение точки пересечения продольных .осей орудие и трактора от направления вектора абсолютной скорости точки, сохраняющей заданное нагфйБле12
ние движения. Другим слагаемым является отклонение рабочего органа орудия от точки пересечения продольных осей.
Получение в чистом виде слагаемых суммарного отклонения позволяет более точно оценить причины, вызывающие отклонения рабочих органов орудия от заданного направления движе-- ния, и найти наиболее эффективные способы устранения зтих причин Способом реализуется новый прием. Сущ- ность его состоит в отсчете оишоне- ния рабочего органа сельскохозяйственного агрегата не с временным запаздыванием от предварительно
-
to
5
20
, -
2769022
чанного, а от заданного истинного направления движения. Это позволяет потхучить качественно новый эффект в повьшении точности оценки отклонений, заключающийся в исключении влияния индивидуальных особенностей тракториста на исследуемый процесс.
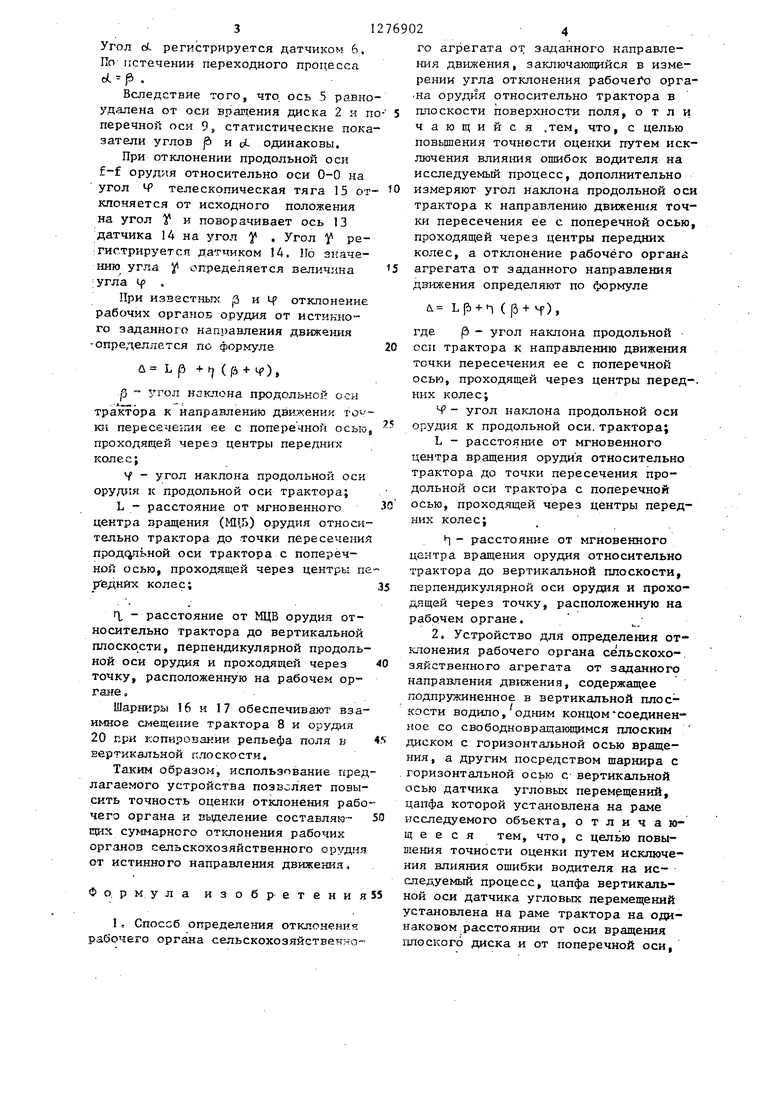
На фиг. I изображено устройство, вид сбоку; на фиг. 2 - сельскохозяйственный агрегат, оборудованный устройством для оценки отклонения рабо чих органов от заданного направления движения, вид сверху,
Устройство для оценки отклонения рабочих органов сельскохозяйствен- ных агрегатов от заданного направления движения включает водило 1, На одном водилз 1 установлен сзс бодновращающийся плоский диск 2 с горизонтальной осью вращения, прижатый к почве пружиЕ;оЙ1 3. Другим концом водило 1 посредством шарнира 4 с горизонтальной осью вращения сопряжено с вертикальной осью 5 датчика 6 угловых перемещений. Цапфа 7 оси 5 установлена на раме трактора 8. Ось 5 расположена на одинаковом расстоянии от оси вращения диска 2 и поперечной оси 9, проходящей через центры передних колес 10 и И трактора 8.
С тыльной стороны остова трактора 8 выполнен шарнир 12, Вертикальная ось 13 его сопряжена с одной стороны с датчиком 14 угловых перемещений, ас другой с телескопической тягой 15. Тяга 15 содержит шарниры 16 и 17 с горизонтальными осями и концевые шарниры 12 и 18 с вертикальными осями 13 и 19. Цапфа шарнира 18 установлена на раме 20 орудия.
Устройство работает следующим образом.
При движении трактора 8 со., скоростью V точка А.
25
30
35
40
45
50
55
, д . , -.„ , л , расположенная. на оси 9 на одинаковом расстоянии от центров холес 0 и 11j перемещается со скоростью , Диск 2 под действием пружины 3 прижимается к почве и перекатывается по ней. Водило 1 устанавливается параллельно V . Горкзонтальиьш шарнир 4 обеспечивает ко:гшрова1гяе диска 2 микронеровностей рельефа поля При перекагш- вании трактора 8 относительно V на угол . р вощило 1 отклоняется от прямой О-О ка vf CH Ы. и поворачивает ось 5 датчика 6 тагсжв на угол oi ,
Угол cL регистрируется датчиком 6, По 1стечении переходного процесса d. .
Вследствие того, что, ось 5 равноудалена от оси вращения диска 2 и п перечной оси 9, статистические пока затели углов |S и oL одинаковы.
При отклонении продольной оси f-f орудля относительно оси 0-0 на угол Ч телескопическая тяга 15 отклоняется от исходного положения на угол У и поворачивает ось 13 датчика 14 на угол у , Угол У ре- гистрируется датчиком 14, Но значению угла определяется величина ;угла If ,
При известных (3 и Ц отклонение рабочих органов орудия от истинного заданного направления движения -определяется по формуле
.р
(3 (/5 + Ч ), угол наклона продольной оси
трактора к направлению дви.жения Kfs пересечекия ее с поперечной осью, проходящей через центры передних колес;
f - наклона продольной оси оруд1 я к продольной оси трактора;
L - расстояние от мгновенного центра вращения (М1ГГ) орудия относительно трактора до точки пересечения прод(у1ьной оси трактора с поперечной осью, проходящей через центры пе- р еднйх колес;
f, - расстояние от МЦВ орудия относительно трактора до вертикальной плоско.сти, перпендикулярной продольной оси орудия и проходящей через точку, расположенную на рабочем органе .
Шарниры 16 и 17 обеспечивают взаимное с1-4ещение трактора 8 и орудия 20 при копировании рельефа поля в 45 вертикал1ьной плоскости.
Таким образом, использование предлагаемого устройства позволяет повысить точность оценки отклонения рабочего органа и выделение составляю- 50 щих суммарного отклонения рабочих органов сельскохозяйственного оруд.чя от истинного направления движеш-1я,
Фо. рмула изобретения 55
1, Способ определения отклонения рабочего органа сельскохозяйственно40
10
15
0
го агрегата от заданного направления дв1-гаения, заключающийся в измерении угла отклонения рабочех о орга- на орудия относительно трактора в плоскости поверхности поля, о т л и чающийся .тем, что, с целью повьшения точности оценки путем исключения ВЛИЯ1ШЯ ошибок водителя на исследуемый процесс, дополнительно измеряют угол наклона продольной оси трактора к направлению движения точки пересечения ее с поперечной осью, проходящей через центры передних колес, а отклонение рабочё.го органа агрегата от заданного направления движения определяют по формуле
л L|Ь + t (р + М )
где (Э - угол наклона продольной оси трактора к направлению движения точки пересечения ее с поперечной осью, проходящей через центры перед-. них колес;
Ч - угол наклона продольной оси орудия к продольной оси. трактора;
L - расстояние от мгновенного центра вращения орудия относительно трактора до точки пересечения продольной оси трактора с поперечной 0 осью, проходящей через центры передних колес;
|-| - расстояние от мгновенного центра вращения орудия относительно трактора до вертикальной плоскости, перпендикулярной оси орудия и проходящей через точку, расположенную на рабочем органе.
2. Устройство для определения отклонения рабочего органа сельскохо-. зяйственного агрегата от заданного направления движения, содержащее
5
5
подпружиненное в вертикальной плоскости водило, одним концом СОединенное со свободновращающимся плоским диском с горизонтальной осью вращения, а другим посредством шарнира с .горизонтальной осью с- вертикальной осью датчика угловых перемещений, цапфа которой установлена на раме исследуемого объекта, о т л и ч а ю- щ е е с я тем, что, с целью повышения точности оценки путем исключения влияния ошибки водителя на исследуемый процесс, цапфа вертикальной оси датчика угловых перемещений установлена на раме трактора на одинаковом :расстоянии от оси вращения плоского диска и от поперечной оси.
проходящей через центры передних колес, а с тыльной стороны-остова трактора закреплен шарнир с вертикальной осью, сопряженной с одной стороны с датчиком угловых пермеще- ний орудия относительно трактора,
1276902О
с другой с телескопической тягой, которая имеет два шарнира с горизон тальными осями и концевой шарнир с вертикальной осью, цапфа ко- 5 торого установлена на раме орудия.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННОЕ ОРУДИЕ ОБРАБОТКИ ПОЧВЫ И СПОСОБ ОБРАБОТКИ ПОЧВЫ | 2007 |
|
RU2340137C1 |
| ДИСКОВОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2477035C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311011C1 |
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
| УСТРОЙСТВО ДЛЯ НАВЕШИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ОРУДИЙ НА ТРАКТОР | 1999 |
|
RU2159526C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2011 |
|
RU2485742C1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2303339C1 |
| СЦЕПНОЕ УСТРОЙСТВО ТЯГАЧА | 2002 |
|
RU2214925C2 |
| СПОСОБ ПЕРЕВОДА СЕКЦИЙ ШИРОКОЗАХВАТНОГО ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ИЗ РАБОЧЕГО В ТРАНСПОРТНОЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339204C2 |
| Полунавесная рама-сцепка | 1989 |
|
SU1657085A1 |
Изобретение относится к производственно-техническому обеспечению сельского хозяйства. Цель изобретения - повышение точности оценки путем исключения влияния ошибок водителя на исследуемый процесс. Отклонение рабочих органов определяется по перпендикуляру к направлению век- гора абсолютной скорости точки на агрегате, сохраняЕощей заданное йап- равление движения. Для осуществления способа в устройстве водило 1 с плоским диском 2 прнжато к почве пружиной 3. Водило 1 через шарнир 4 сопряжено с вертикальной осью 5 датчика угловых перемещений 6. Цапфа 7 установлена на раме трактора В.Поперечная ось проходит через центры передних колес трактора 8. С тыльной стороны остова трактора 8 выполнен шарнир 12. Вертикальная ось 13 шарнира 12 сопряжена с датчиком угловых перемещений 14 и с телескопической тягой 15. Тяга 15 содержит шарниры 16 и 17. Концевой шарнир 18 имеет вертикальную ось 19. Цапфа шарнира 18 установлена на раме 20. 2 . ф-лы, 2 ил. / с S (Л 1C О5 со о to 7
}0
20
фиг. 2
Редактор Н.Киштулинец
Составитель А.Паньков
Техред ИоПопович Корректор Т.Колб
Заказ 6656/32Тираж 670,Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предггриятие, г.Ужгород, ул.Проектная, 4
| Бакулин В.К | |||
| Прибор для оценки стабиль ности хода орудия на склоне | |||
| - Механизация и электрификация социалистического сельского хозяйства, 1979, № 3, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
