Изобретение относится к устройствам контроля за перемещением подвиж- ньпс объектов и может быть использовано для контроля постулательного движения механических узлов.
Цель изобрете ния - упрощение конструкции устройства при повышении надежности его эксплуатации.
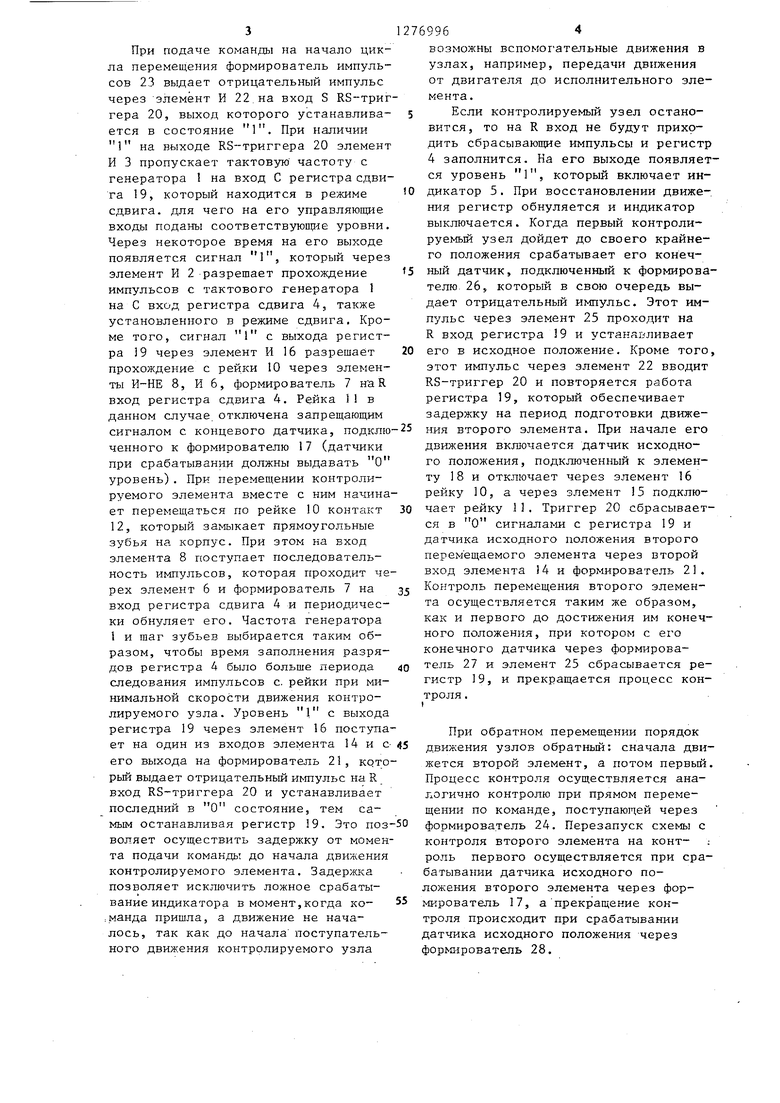
На фиг.1 приведена функциональная схема предлагаемого устройства; на фиг.2 - возможная конструкция импульсного датчика перемещения, выполненного в виде рейки с токопроводящим рисунком.
Устройство содержит тактовый гене ратор 1, первый 2 и второй 3 элементы И, первые входы которых соединены с выходом тактового генератора 1,пер вьй регистр сдвига 4, вход синхро- н изации которого соединен с выходом первого элемента И 2, а один из его выходов соединен с индикатором 5,тре тий элемент И 6, выход которого через первый формирователь импульсов 7 соединен с входом установки в О первого регистра сдвига 4, элементы И-НЕ 8 и 9, выходы которых подключены к входам третьего элемента Е 6, рейки с токопроводящим рисунком 10 и 11, взаимодействующие соответственно с контактами 12 и 13, соединенные с корпусом контролируемых узлов, элемент ИЛИ 14, четвертьш 15 и пятьй 16 элементы И, выходы которых соединены с первым и вторым входами элемента ИЛИ 1А и со вторыми входами элементов И-НЕ 9 и 8 соответственно, второй формирователь импульсов 17, эле- .мент НЕ 18, выход которого соединен с первым входом пятого элемента И 16, а вход соединен с входом второго формирователя импульсов 17 и с первым входом четвертого элемента И 15, второй вход которого соединен с первым входом пятого элемента И 16 вто рым входом первого элемента И 2 и с одним из выходов второго регистра сдвига 19, вход синхронизации которого соединен с выходом второго элемента И 3, второй вход которого соединен с выходом RS-триггера 20, вход R которого через третий формирователь 1-шпульсов 21 соединен с выходом элемента ИЛИ 14, а вход S RS-тригге- ра 20 подключен к выходу шестого эле мента И 22, первые два входа подключены к выходам четвертого 23 и пятого 24 формирователей импульсов,, а
0
0
5 45
третий и четвертый входы шестого элемента И 22 соединены с первым и вторым входами седьмого элемента И 25 и подключены к входам второго 17 и шестого 26 формирователей импульсов соответственно, а третий и четвертьй входы седьмого элемента И 25 подключены соответственно к выходам седьмого 27 и восьмого 28 формирователей импульсов,
Устройство работает следующим образом.
Перед работой необходимо установить рейки вдоль ли:нии перемещения контролируемого узг-а, причем каждая рейка предназначена для контроля за одним движущимся элементом. На каждый двшкуи(ийся элемент устанавливается контакт, например, в виде медной пластинки с вьк;тупом на конце дая контактирования с рейкой, который соединяется с ;орпусом контролируемого узла. Корпус узла необходимо подключить к общему выводу источника питания для данного устройства. Формироватет:;и импульсов 23 и 24 необходимо подключнт1 к Цепям команд на перемещение узлов (одна команда на прямое перемещение, другая на обратное). К формирователям 17, 26, 27 и 28 необходимо подключить концевые датчики контролируемь х узлов. Обычно такие датчики уже имеются в конструкции подвижных узлов для ограничения длины пе)еамещения (если нет, то их необходимо поставить). Конструкция их мож(гт быгь самая различная (электроконтактные, магнито- управляемь е и т.д.). Подключение концевых датчиков необходимо производить в следующем порядке: к формирователям 26 1-1 28 подключают концевые датчики подвижного элемента, перемещение которого в соответствии с производственным циклом выполняется первым, причем к эт;ементу 28 подк.гао- чается датчик его исходного положения, а к фopмipoвaтeлю 26 - датчик его конечного положения (при, прямом перемещении элемента). К формирователям 17 и 27 годключа от датчики подвижного элемента, перемещение которого производится после перемещения первого подвижного элемента, при- 55 чём к формирователю 27 по,цключается датчик конечного положения, а к формирователю 17 - датчик исходного положения .
0
5
40
50
При подаче команды на начало цикла перемещения формирователь импульсов 23 выдает отрицательный импульс через элемент И 22 на вход S RS-триг гера 20, выход которого устанавливается в состояние 1. При наличии 1 на выходе RS-триггера 20 элемент И 3 пропускает тактовую частоту с генератора 1 на вход С регистра сдвига 19, который находится в режиме сдвига, для чего на его управляющие входы поданы соответствующие уровни. Через некоторое время на его выходе появляется сигнал 1, который через элемент И 2 разрешает прохождение импульсов с тактового генератора 1 на С вход регистра сдвига 4, также установленного в режиме сдвига. Кроме того, сигнал 1 с выхода регистра 19 через элемент И 16 разрешает прохождение с рейки 10 через элементы И-НЕ 8, И 6, формирователь 7 наR вход регистра сдвига 4, Рейка 1 в данном случае, отключена запрещающим сигналом с концевого датчика, подключенного к формирователю 17 (датчики при срабатывании должны выдавать О уровень), При перемещении контролируемого элемента вместе с ним начинает перемещаться по рейке 10 контакт 12, который замыкает прямоугольные зубья на корпус. При этом на вход элемента 8 поступает последовательность импульсов, которая проходит че рех элемент 6 и формирователь 7 на вход регистра сдвига 4 и периодически обнуляет его. Частота генератора 1 и шаг зубьев выбирается таким образом, чтобы время заполнения разрядов регистра 4 было больше периода следования импульсов с. рейки при минимальной скорости движения контролируемого узла. Уровень 1 с выхода регистра 19 через элемент 16 поступает на один из входов элемента 14 и с его выхода на формирователь 21, кртр рьй выдает отрицательный импульс на R вход RS-триггера 20 и устанавливает последний в О состояние, тем самым останавливая регистр 19. Это позволяет осуществить задержку от момента подачи командь до начала движения контролируемого элемента. Задержка позволяет исключить ложное срабатывание индикатора в момент,когда ко- :манда пришла, а движение не началось, так как до начала поступательного движения контролируемого узла
2769964
возможны вспомог ательные движения в узлах, например, передачи движения от двигателя до исполнительного элемента,
5 Если контролируемый узел остановится, то на R вход не будут приходить сбрасывающие импульсы и регистр 4 заполнится. На его выходе появляется уровень 1, который включает ин- 10 дикатор 5, При восстановлении движения регистр обнуляется и индикатор выключается. Когда первый контроля- руемьш узел дойдет до своего крайнего положения срабатывает его конеч- 15 ный датчик, подключенный к формирователю 26, который в свою очередь выдает отрицательный импульс. Этот импульс через элемент 25 проходит на R вход регистра 19 и устанавливает
20 его в исходное положение. Кроме того, этот импульс через элемент 22 вводит RS-триггер 20 и повторяется работа регистра 19, который обеспечивает задержку на период подготовки движе- 25 ния второго элемента. При начале его движения включается датчик исходного положения, подключенный к элементу 1 8 и отключает через элемент 16 рейку 10, а через элемент 15 подклю0 чает рейку 11, Триггер 20 сбрасывается в О сигналами с регистра 19 и датчика исходного положения второго перем ещаемого элемента через второй вход элемента )4 и формирователь 21.
с Контроль перемещения второго элемента осуществляется таким же образом, как и первого до достижения им конечного положения, при котором с его конечного датчика через формирова0 тель 27 и элемент 25 сбрасывается регистр 19, и прекращается процесс контроля , I
При обратном перемещении порядок 5 движения узлов обратный; сначала движется второй элемент, а потом первый. Процесс контроля осуществляется аналогично контролю при прямом перемещении по команде, поступающей через 0 формирователь 24, Перезапуск схемы с контроля второго элемента на конт- ; роль первого осуществляется при срабатывании датчика исходного положения второго элемента через фор- 5 мирователь 17, а прекращение контроля происходит при срабатывании датчика исходного положения через фop fflpoвaтeль 28.
Элементы схемы обработкР сигнала предлагаемого устройства могут быть выполнены на любых ИС, например,, серии К 155. Индикатор может быть использован любой при соответстветст- вующем сопряжении выходного уровня регистра и входного уровня инди1 а- тора. Рейки могут быть вьтолнены из фольгированного стеклотекстолита, а рисунок на них может быть выполнен травлением.
Формула изобретени
Устройство контроля перемещения механических узлов, содержащее )У1Оду лирутощий элемент, импульсньй датчик перемещения, сопряженный с моду.1.и- руюар м элементом, схему обработки сигнала и индикатор, о т л и ч а ющ е е с я
тем, что, с целью упрощения конструкции при повышении ее надежности, схема обработки сигнала содержит регистры сдвига., формирователи импульсов, КЗ-триггер., элементы И,И-НЕ, ИЛИ, НЕ и тактовый генератор, выход которого подключен к первым входам первого и второго элементов И, выход первого из которых подключен к входу синхронизации первого регистра сдвига, к выходу которого подключен индикатор, а к R- входу регистра, сдвига через первый
769966
формярователь подключен выход третьего элемента И, к входам которого подключены выходы элементов И-НЕ 5 первые входы к оторых подключе- ,- ны к импульсным датчикам перемещения, а BTOpbie входы - к )зходам элемента ИЛИ и к выходам четзертого и пятого элементов И, причем первый вход четвертого элемента И соединен с входом
10 второго формирователя импульсов и с входом элемеь тг НЕ, выход которого подключен к первому входу пятого элемента И, а вторые входь: четвертого и пятого элементов И соединены с вто15 рым входом первого элемента Икс выходом второго регистра сдвига, вход синхронизации которого соединен с выходом второго элемента И, второй вход которого нодключен к выходу Е.3-триг
20 гера, вход которого через третий формирователь импульсов подключен к выходу элемента ИЛИ, а S-вход подключен к выходу шестого элемента И, первые два входа которого подключены соот25 ветственно к выхода -; четвертого и пятого формирователей импульсов, а третий и четвертый зходы - к выходам второго и шесто: о формирователей импульсов и к первому и второму вхо- Q дам седьмого и восьмого формирователей импульсов, а выход седьмого элемента И подк.г :о чен к R-входу второго регистра сдвига.
Фае.2
Составитель Ю.Мручко Редактор В.Ковтун Техред Л.Сердюкова Корректор Е.Роьчко
Заказ 6661/37 Тираж 778Подписное
ВИНИЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,ул.Проектная,4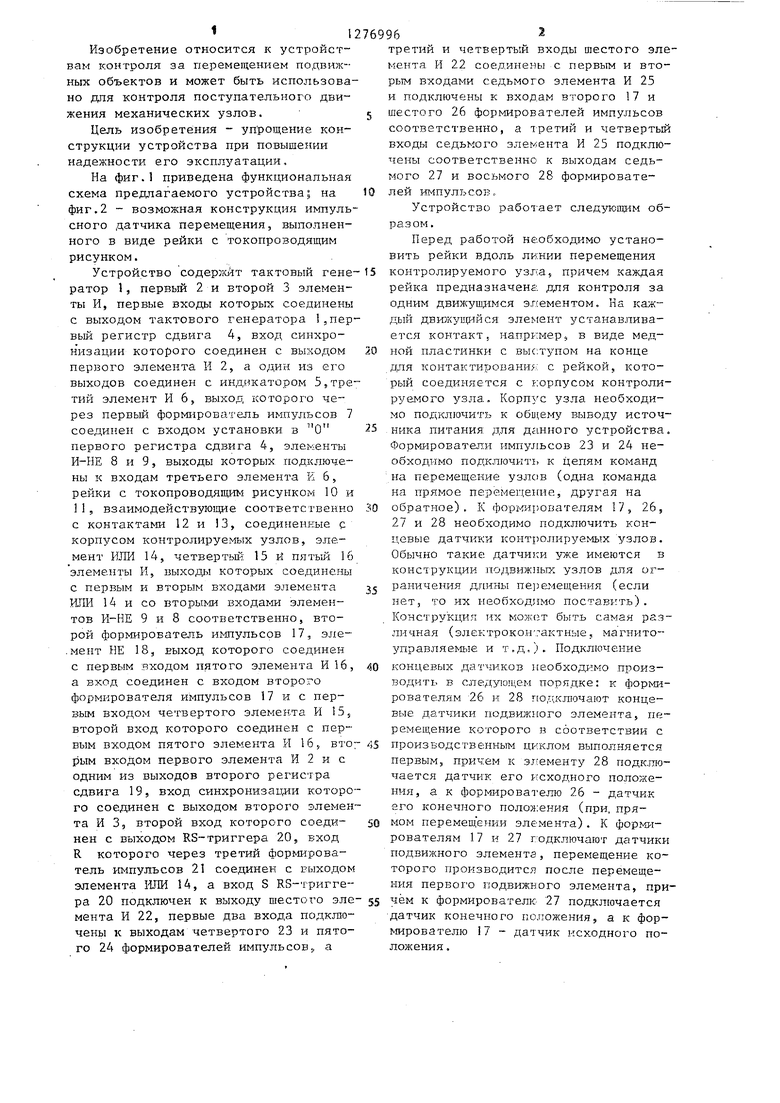
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ПОЛЕТА | 2010 |
|
RU2409826C1 |
| ТОНОМЕТР | 2008 |
|
RU2359609C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2319203C1 |
| УСТРОЙСТВО ВВОДА-ВЫВОДА ИНФОРМАЦИИ ДЛЯ СИСТЕМЫ ЦИФРОВОГО УПРАВЛЕНИЯ | 1993 |
|
RU2042183C1 |
| Устройство для контроля электрического монтажа | 1983 |
|
SU1151991A1 |
| СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2313827C1 |
| ЦИФРОВОЕ ПЯТИКАНАЛЬНОЕ РЕЛЕ С ФУНКЦИЕЙ САМОДИАГНОСТИКИ | 2017 |
|
RU2671545C1 |
| Устройство для измерения линейных перемещений | 1991 |
|
SU1805279A1 |
| УСТРОЙСТВО ДЛЯ ЭКСПРЕСС-КОНТРОЛЯ РАБОТЫ СЕРДЦА ЧЕЛОВЕКА | 2006 |
|
RU2320258C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2194946C2 |
Изобретение относится к устройствам контроля за перемещением подвижных объектов и позволяет упростить конструкцию устройства при повышении надежности его эксплуатации. Устройство содержит тактовый генератор 1, элементы И 2,3,6,15,16,22 и 25, регистры 4 и 19 сдвига, индикатор 5, формирователи 7,17,21,23,24, 26,27 и 28 импульсов, элемент И-НЕ 8 и 9, контакты 12 и 13, элемент ИЛИ 14, элемент НЕ 18 и RS-триггер. 20. Введение новых элементов и образование новых связей между элементами устройства позволяет проводить контроль перемещения механизмов загрузки - выгрузки диффузионного оборудования производства кремниевых пластин. 2 ил. - ГчЭ О) CD
| КАМЕРНЫЙ ПИТАТЕЛЬ НАГНЕТАТЕЛЬНОЙ ПНЕВМОТРАНСПОРТНОЙ УСТАНОВКИ | 2006 |
|
RU2323151C2 |
| Насос | 1917 |
|
SU13A1 |
| СПОСОБ ПОЛУЧЕНИЯ ВАНАДИЙСОДЕРЖАЩЕГО ФЕРРОСПЛАВА | 2001 |
|
RU2201467C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
