рующей технике,; Б чустпост. ройствам для автомата ;taска го «епре-- рывпох о весоБого дозиповапня сыпучих материалов.
Цель изобретения - повышение гоч-- ностл доэироваиия за счет позпли еии); быстродействия п линейносл-я системы упргшления в целом.
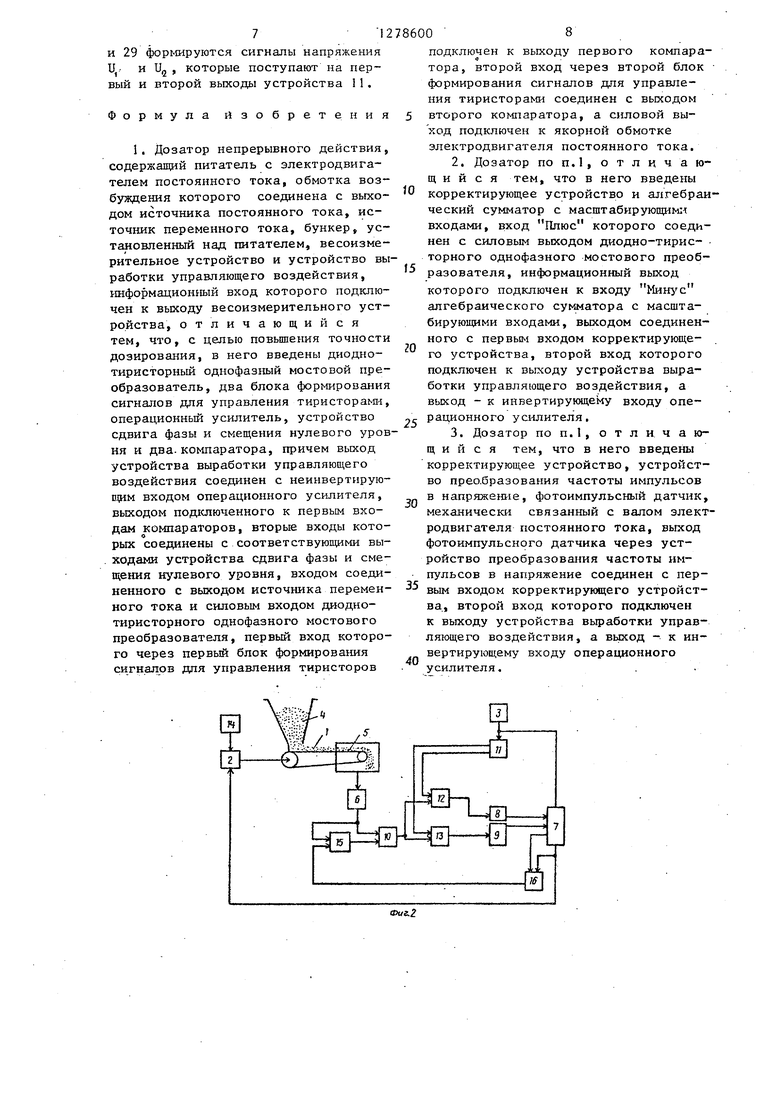
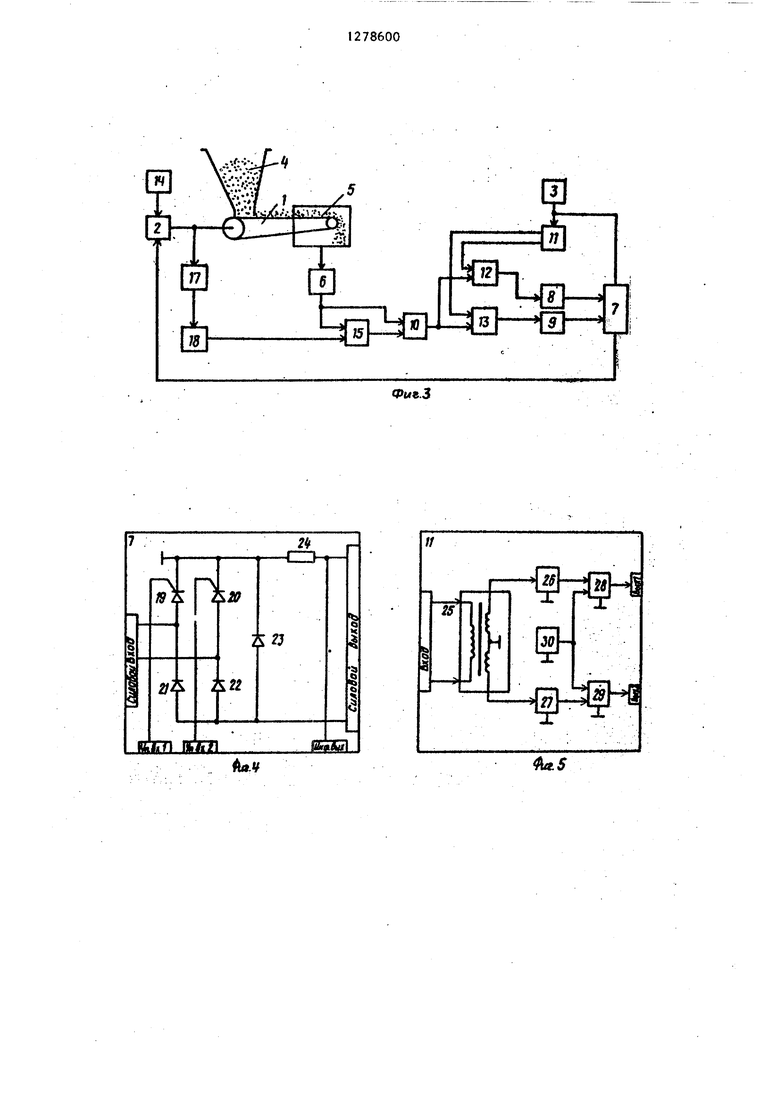
На фиг. изобралсеиа функдисшаль-- пая схема; на фиг. 2 и 3 - кариапть: испол1- ения дозатора пеирерь;ви( действия;, па фиг. / - функциональная
схема гиoдIЮгиристорного одгизфазлс го ocтoвoгo ггреобразоватолл;, на фиг. 5 фзипсдиональная cxe-.ia устргм;- CTjja cit.uKi a. фазы и сгоещеш я iiyjicjjoj o . е диумя иыходаьги; iva фиг, 6 - диаграммы ааирязкеиий; на (Ьнг, 7 фупкциоиап.ьиал схема у строй ../; работки yHpaBjrnraiJiei o воз/гейс 1
Дозат-о) ijenpGpbi Mioro ;tr -:e - (фигЛ) .содержит 1ип ател) i г родвигателем 2 постояшюгс; тока j ис- точии;; 3 нере;4еино1 о тока бункер 4, ус га 1овлепнь(й над иитателел 1 ,, веео- нзгмврительное устройство 5, устройство б выработки управляи/цег о юадей:ст:5ия, инфорыацио:нн,ьп1 иход к п-орог о связан е выходом Бесоизмертггельпогс) ycTpoiicTBa 5,, диодно--тиристори1.ий однофазный мостовой преобразовате,), 7„ дна блока 8 и 9 формпроаии ия сигна,- лов для ун.равления тиристорами,оне- радионнь й усилитель К). 1:еин.я: ртиру}о 11СИЙ вход которого связан с ;;ьо;:одо:-.г устройства 6 Ва работки управляю1дел о воздействия, устройство 1 1. c;.i;tiiii a фа. зы ц смещения нулевого уровня с. двумя выходами, вход которого связан с вы содом истонника 3 переые1;г;огю
onepai jjomioro усдипггеля 10, Второй, вход компаратора 12 связан с иервым выходом ycTpoiicTBa 1 I j втс;рой выход KOTojjoro связан с вторым B.KO,;JOM ком.паратора 13, При этом вьсюд ксмпара.- тора 12 чер-ез блок 8 Ьормировклия С1 гаало;о связан с первым упра5 ля}01 .1им входом диодно-тиристорног О однофаз-- ного мостового преобразователя 7, второй управляющий вход, которого через блок 9 фop(Hpoвaния :игнаяов СЕЯ зан с выходом комиаратора 13 Силовой вход диодно-тирясторьюго однофаз
ного мостового преобразова 1 еля 7 связан с выходом источньиса 3 неременноЗ
0
:i
5
5
I о тока, а силово;- выход .|;дк;|дно-ти- я:сторе.ого однофазного мсетового пре- образовате. ге 7 связан, с входом якорной обгютки элактродви1 ателя 2, обмотка возбу:«дения которого связало, с аькодом источника 14 нитания постоянного тока.
Дозатор ненрерывного дейетви.Е5 ({ у И г дональная схема которого показана на фиг, 2; может иметь коррек- устройство 15 и алгебраический суь матор 16 с масштабирую цимн в;;.одами, вход Плюс которого связан с снловьы выходом диодно-тиристорно- го одной азного мостового преобразователя 7, ннформадионн)1Й зьпюд которого связан с входом Минус алгеб- Р нчес7 ого сунь атора 16; выход кото- рог(з сБЯ-аг 1г перв1лм Bxo/i;oM корректи- pyio ii.e.vo устройства 15, второй вход которого связан с зь ходом ycTpoiicT- л. а 6 выработ.кн .аиля;о: его воздействия, а KoppeKi Hpyra Gi o уст- pixicTBa 1.5 с.5.зан е и - ;зертпру101щ- м
взчодом онерадиониого усл.:7 ггеля 10, Дозатор иепрерл1вн.ого действия, Фунхд оиальная схема KOJ opoi o нока- 3ai-:a иа фн1 , 3 , иметь корректи-- ру:о;нее у(:.тройство 15, фотоимиульсн.ый
датчи:к 17. нехан1-и;.ески связанный с валом электродвигателя 2 постоян- ног О тока, и уетрс йетво 38 иреобра- .зования Частоты и:.гоульсоБ в напря- ;кение. Выход фотоимпульсного датчика 17 через устройство 18 нреобра- ;
, .згхвания частоты и пульсов в напря;ке- :ше связан с лервьм входо 1 коррек- ; г:рун)) ;его устройства 15, второй вход чоторогс- с ВЬЕЮДОМ устройства 6 выработки управляю дего воз.дей- ст .аня, а вьпсод коррект;-:рую}1-его уст- ройс1 ва 15 г-вязан с инвертирую1щ- м чходом оиЕрадионного ycHJH TejiH 0,
Диодно-тяристорный однофазный МС1СТОЗОЙ преобразователь 7 (фиг, 4) имеет тиристоры 19,20 к ддоды 21s22, соединенные по однофазной :-юстовой схеме., диод 23 и UJJH-IT 24, Унравляга- ; гие электроды тиристоров 19 и 20 иодключены соотзетственно к первому U второму управляюип,1м входам преобразователя 7, шгодиые в лводы тиристоров 19 и 20 .и катоцные выводы диодов 21 и 22 объединены и под1тл чень к си,ловому входу преобразователя 7. Ка- тоднме выводы тиристоров 1У и 20, ;; свою очередьj об-ьедкр ены и нод.гш-о- чены к катодному выводу диода 23 и
через шунт 24 к силовому выходу преобразователя 7. Анодные выводы диодов 21 и 22 также .объединены и подключены к анодному выводу диода 23 и силовог-гу выходу преобразователя 7. Кроме того, катодные выводы тиристоров 19 и 20, а также диода 23 через шунт 24 подключены к информационному выходу преобразователя 7.
Устройство 11 сдвига фазы и смещения нулевого уровня с двумя выходами (фиг.5) имеет трансформатор 25, первичная обмотка которого подключена к входу устройства 11, интеграторы 26 и 27, входы -которых подключены к соответствующим выходам трансформатора 25, а выходы интеграторов 26 и 27 подключены соответственно к nepBbiM входам алгебраических сумматоров 28 и 29, вторые входы которых объединены и подключены к выходу резистивного задатчика 30 сигналов с источником питания. Выходы алгебраических сумматоров 28 и 29 подключены соответственно к первому и второму выходам устройства 11.
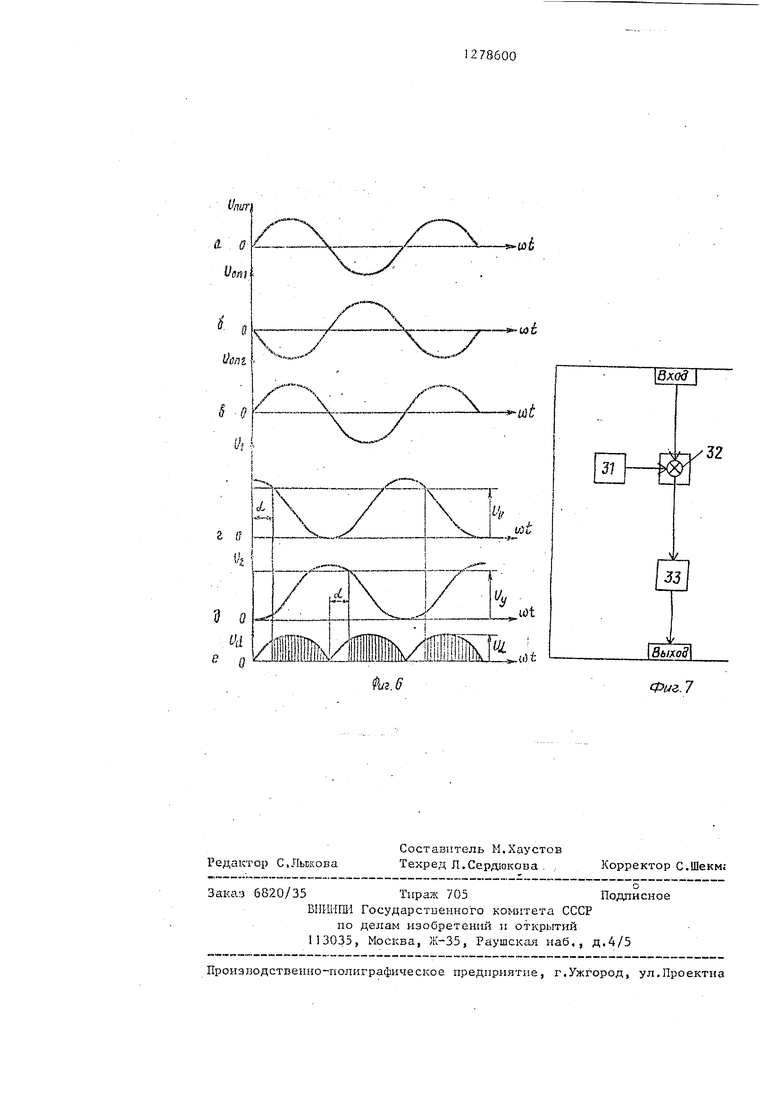
Устройство 6 выработки управляющего воздействия (фиг.7) может имет задатчик 31, блок 32 сравнения, первый вход которого соединен с выходом задатчика 31, а второй вход - с входом устройства 6. Выход блока 32 сравнения соединен с входом корректирующего устройства 33, выход которого соединен с выходом устройства 6.
Дозатор непрерывного действия (фиг.I) работает следующим образом.
Сыпучий материал из бункера 4 подается питателем 1 в технологическую линию производства. Текущее значение массы материала, находящегося в бункере 4 и на питателе 1, измеряется весоизмерительным .устройством 5, выходной сигнал которого, пропорциональный измеряемой массе материа ла, поступает на вход устройства 6 выработки управляющего воздействия. Последнее на .основе полученной информации формирует сигнал управления
.
Uy. Сигнал управления Uy с выхода устройства 6 поступает на неинвертирующий вход операционного усилителя 10 и далее на первые входы компараторов 12 и 13, на вторые входы кото- ;рых поступают сдвинутые по фазе один относительно другого на 180 сигналы напряжения U. и U, (фиг.6) соответст- венно с первого и второго выходов
I устройства 11 сдвига фазы. В компараторах 12 и 13 происходит сравнение сдвинутых по фазе напряжений сигна: лов и,, и и
2
управления U тых по фазе
с напряжением сигнала У, Формирование сдвину- один относительно другоfO
f5
20
ь30 35
25
40
45
50
55
го на 180 управляющих импульсов U и Uj на выходе блоков 8 и 9 для управления тиристорами 19 и 20 производится в момент из менения знака раз ности указанных напряжений с Плюс на Минус. Сдвинутые по фазе один относительно другого на 180° управляющие импульсы и,,, и и поступают соответственно на первый и второй управляющие входы диодно-тиристорно- го однофазного мостового преобразователя 7 и далее на управляющие электроды тиристоров 19 и 20. Таким образом, обеспечивается синхронизированная работа блоков 8 и 9 и подача уп- равляющих импульсов U и U в необходимой последовательности на управляющие электроды тиристоров 19 и 20, которые включаются в момент подачи импульса и выключаются при дении ур,овня сигнала Uj до нулевого значения. При этом на силовом выходе диодно-тиристорного однофазного
. мостового преобразователя 7 формируется сигнал напряжения Ej, средняя величина которого определяется площадью заштрихованной области диаграммы напряжений, показанной на фиг.6,. Этот сигнал напряжения Ej, пропорциональный величине управляющего сигнала Uy, поступает на якорную обмотку электродвигателя 2 постоянного тока, обмотка возбуждения которого подключена к стабилизированному источнику питания, и пропорционально увеличивает либо уменьшает скорость транспортирования материала питателем 1, устраняя, таким образом, отклонение текущего значения расхода массы материала на выходе дозатора от заданной его величины, которая устанавливается задатчиком 31 устройства б выработки управляющего воздействия .
Практическая безынерционность диодно-тиристорного однофазного мостового преобразователя 7 в сравнении
:С электромашинным преобразователем у известного устройства обеспечивает за счет использования в схеме полу1 проводников максимальное быстродействие системы управления дозатором.Кроме того, результирующая характеристика преобразователя 7 Е f(Ц, ) оказывается линейной, хотя зависимость f(U.j) (фиг.6), характеризующая момент включения тиристоров, нелинейна. Это обеспечивается за счет выполнения процедуры нелинейного преобразования двух функций oi f (Uy), Uj f(u)t) (фиг. 6).
Дозатор непрерывного действия (фиг. 2) работает аналогично описанному. Различие в функционировании определяется наличием обратной связи по скорост транспортирования материала, которая вводится с целью повышения точности дозирования за счет увеличения жесткости механической характеристики электродвигателя 2 постоянного тока. Сигнал, пропорциональный текущей скорости транспортирования материала, формируется на выходе алгебраического сумматора 16 с масштабирующими входами из информационного токового сигнала, пропорционального нагрузке электродвигателя 2, и сигнала напряжения Ej, снимаемых соответственно с информационного и силового выходов диодно-тирис торного однофазного мостового преобразователя 7, и поступает на первый вход корректирующего устройства, реализующего ПИ или ПИД закон регулирования. На второй вход корректирующего устройства 15 поступает сигнал с выхода устройства 6 выработки управляющего воздействия, который в данном случае является сигналом заданной скорости транспортирования. На выходе устройства 15 формируется корректирующий сигнал, который поступает на инвертирующий вход опера- щюнного усилителя lU.Ha неинвертирующий вход.операционного усилителя 10 поступает сигнал с выхода устройства 6. На выходе операционного усилителя 10 формируется сигнал управления Uy .и далее устройство работает аналогично.
Дозатор непрерывного действия (фиг.З) работает также аналогично ус-щэойству, показанному на фиг.1. Различие в функционировании определяется наличием обратной связи по скорости транспортировании материала, которая вводится с целью увеличения жесткости механической характеристики электродвигателя 2 постоянного тока, и использования датчи
ка скорости в составе электропривода дозатора. При этом точность дозирования увеличивается по сравнению с устройством (фиг.1) за счет устранения динамической ошибки, обусловленной изменением напряжения питания и переменной величиной нагрузки электродвигателя 2 постоянного тока. С выхода фотоимпульсного датчика 17 снимается импульсный сигнал, пропорциональный текущей скорости транспортирования материала. Этот сигнал преобразовывается в напряжение устройством 18 и поступает на первый вход корректирующего уст- ройства 15, на второй вход которого поступает сигнал с выхода устройства 6 выработки управляющего воздействия, который в данном случае является сигналом заданной скорости транспортирования материала. На выходе устройства 15 формируется корректирующий сигнал, которьЕЙ поступает на инвертирующий вход операционного усилителя 10.На неинвертирующий вход операционного усилителя 10 поступает сигнал с выхода устройства 6. На выходе операционного усилителя 10 формируется сигнал управления Uy и далее дозатор работает аналогично изложенному.
Устройство 11 сдвига фазы и смещения нулевого уровня с двумя выходами (фиг.5) предназначено для формирования сигналов напряжения .(фиг.6) и работает следующим образом. Первичная обмотка трансформатора 25 запитывается напряжением от источника 3 переменного тока. При этом с соответствующих выходов трансформатора 25 снимается синусоидальное опорное напряжение U, - и U , сдвинутое по фазе одно относительно другого на 180 и с периодом изменения, равным периоду питающего напряжения . Сигналы напряжения U и поступают на входы интеграторов 26 и 27. На вьпсоде интеграторов 26 и 27 формируются сигналы напряжения, смещенные относительно входных сигналов и„
и
Udnj на
90°, которые
55
поступают на первые входы алгебраических сумматоров 28 и 29. На вторые входы алгебраических сумматоров 28 и 29 поступает сигнал напряжения смещения с выхода резистивного задат- чика 30 с источником питания. На выходе алгебраических сумматоров 28
7 12
и 29 формируются сигналы напряжения U- и и„, которые поступают на первый и второй выходы устройства 11.
Формула изобретения
1. Дозатор непрерывного действия, содержащий питатель с электродвигателем постоянного тока, обмотка возбуждения которого соединена с выходом источника постоянного тока, источник переменного тока, бункер, установленный над питателем, весоизмерительное устройство и устройство выработки управляющего воздействия, 1-шформационный вход которого подключен к выходу весоизмерительного устройства, отличающийся тем, что, с целью повышения точности дозирования, в него введены диодно- тиристорный однофазный мостовой преобразователь, два блока формирования сигналов для управления тнрксто раъш., операционный усилитель, устройство сдвига фазы и смещения нулевого уровня и два. ко шаратора, причем выход устройства выработки управляющего воздействия соединен с неинвертирую- Е5им входом операционного усилителя, выходом под1слюченного к первым входам компараторов, вторые входы которых соединены с соответствующими выходами устройства сдвига фазы и смещения нулевого уровня, входом соединенного с выходом источника переменного тока и силовым входом диодно- тиристорного однофазного мостового преобразователя, первый вход которого через первый блок формирования сигналов для управления тиристоров
8600 8
подключен к выходу первого комлара4
тора, второй вход через второй блок формировсшия сигналов для управления тиристорами соединен с выходом 5 второго компаратора, а силовой выход подключен к якорной обмотке электродвигателя постоянного тока.
2.Дозатор по п,1, отличающийся тем, что в него введены
О корректирующее устройство и алгебраический сумматор с масштабирующим: входами, вход Плюс которого соединен с силовым выходом диодно-тирис- . торного однофазного мостового преоб разователя, информационный выход которого подключен к входу алгебраического сумматора с масштабирующими входами, выходом соединенного с первьпч входом корректирующего устройства, второй вход которого подключен к выходу устройства выработки управляющего воздействия, а выход - к инвертирующему входу операционного усилителя,
3.Дозатор ПОП.1, отличающийся тем, что в него введены корректирующее устройство, устройство преобразования частоты импульсов в напряжение, фотоимпульсный датчик, механически связанный с валом электродвигателя постоянного тока, выход фотоимпульсного датчика через устройство преобразования частоты импульсов в напряжение соединен с первым входом корректирующего устройства., второй вход которого подключен
к выходу устройства выработки управ- лягощего воздействия, а выход - к инвертирующему входу операционного
го
25
35
40
усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| ЦИФРО-АНАЛОГОВЫЙ БЕЗМОТОРНЫЙ СТЕНД | 1968 |
|
SU219833A1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Импульсный стабилизатор напряжения постоянного тока с плавным запуском | 1986 |
|
SU1347075A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| Электропривод постоянного тока | 1979 |
|
SU921015A1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Устройство для управления тиристорами реверсивного преобразователя | 1975 |
|
SU532170A1 |
| Тиристорный регулятор | 1990 |
|
SU1753555A1 |
| СИЛОВАЯ ВЫПРЯМИТЕЛЬНАЯ УСТАНОВКА ВОЗБУЖДЕНИЯ ОДНОФАЗНОГО ПЕРЕМЕННОГО ТОКА ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТА И СПОСОБ ЕЁ УПРАВЛЕНИЯ | 2018 |
|
RU2735290C2 |
Изобретение относится к весодо- зирующей технике и позволяет повысить точность дозирования. Устройство содерш1Т питатель 1 с электродвигателем 2 постоянного тока, источ- 1ШК 3 переменного тока, бункер 4, весоизмерительное устройство 5, устройство 6 выработки управляющего воздействия, диодно-тиристорный однофазный мостовой преобразователь 7, два блока формирования сигналов для управления тиристорами 8 и 9,операционный усилитель 10, устройство 11 сдвига фазы и смещения нулевого уровня, с двумя выходами, два компаратора 12 и 13 и источник 14 питания постоянного тока. Введение новых элементов и образование новых связей позволяет повысить быстродействие и линейность управления в целом. Пред- , ставлен вариант дозатора непрерывного действия. 2 з.п. ф-лы, 7 ил. а S o 00 О5 О ,mS ФыгЛ
Ae.V
5
UMI
« i
l}cni
ХГ7/
jL
..
-lai
tjut
/
Фиг.. 7
Редактор С.Льскова
Закаэ 6820/35Тиралс 705Подписное
В11Ш-{ПИ ГосударстБенного кош1тета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Произтюдствепно-полиграфическсе предприятие, г.Ужгород, ул.Проектна
Составитель М.Хаустов Техред Л.Сер окова , ,
Корректор С.Шекмг
| Видинеев Ю.Д | |||
| Автоматическое непрерьшное дозирование сыпучих материалов | |||
| - М.: Энергия, 1974, с.49 | |||
| Карпин Е.Б | |||
| Средства автоматиза- для измерения и дозирования массы | |||
| - М.: Машиностроение, 1971, с.182, 396. |
