Изобретение относится к акустичесКИМ методам контроля и может быть использовано при ультразвуковой (УЗ дефектоскопии изделий роликовыми преобразователями с эластичным протекто- ром, например, при ультразвуковой теневой дефектоскопии листовых изделий .
Целью изобретения является повы- шецие надежности контроля и упрощение настройки за счет обеспечения автоматической регулировки чувствительности, компенсирующей изменение фактической площади контактирования
эластичного протектора роликового
преобразователя при изменении скорости перемещения последнего относительно контролируемого изделия.
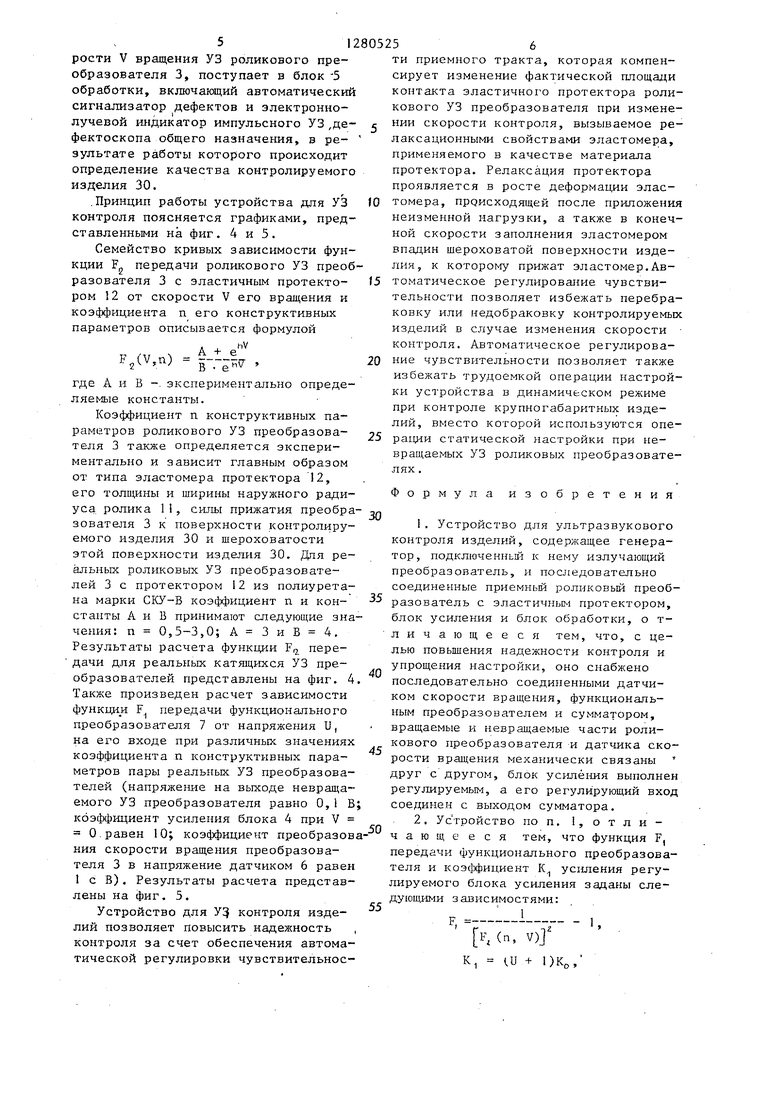
На фиг. 1 представлена блок-схема устройства для УЗ контроля; на фиг.2 вариант конструкции УЗ роликового преобразователя и датчика скорости вращения; на фиг. 3 - вариант принципиальной электрической схемы функционального преобразователя, сумматора и регулируемого блока усиления; на фиг, 4 - графики зависимости функции FJ передачи приемного роликового УЗ преобразователя с эластичным протектором от скорости V его врап1ения при различных значениях коэффициента п конструктивных параметров УЗ преобразователя; на фиг. 5 - графики зависимости функции F передачи функционального преобразователя от напряжения Цч на его входе при различных значениях коэффициента п конструктивных параметров УЗ преобразователя.
Устройство для УЗ контроля содержит генератор 1, подключенньй к нему излучающий УЗ преобразователь 2, и последовательно соединенные приемный УЗ преобразователь 3, регулируемый блок 4 усиления и блок 5 обработки. Кроме того, устройство для УЗ контро ля содержит датчик 6 скорости вращения, функциональный преобразователь 7 и сумматор 8. Устройство также- содержит источник 9- опорного напряжения, выход которого соединен с вторым входом сумматора 8, выход которого в свою очередь соединен с регулирующим входом блока 4 усиления. Приемньй УЗ преобразователь 3 выполнен в виде роликового и включает в себя, например, ось 10, установленный с возможностью вращения вокруг нее пустотелый ролик П, эластичный
5
5
0
0 ка
протектор 12, покрывающий внешнюю цилиндрическую поверхность ролика 11 и пьезоэлемент 13, установленный на оси 10. Датчик 6 скорости вращения, например, построенный на фотоэлектрическом принципе, включает в себя кронштейн 14, установленньш на оси 10, установленные в свою очередь на кронштейне 14 несколько пар фотоизлучателей 15 и фотоприемников 16, оптические оси которых пересекаются на определенном расстоянии от них, и установленньм внутри ролика модулятор 17, обеспечивающий в ходе вращения ролика чередующееся появление в зоне пересечения оптических осей фотоизлучателей 15 и фотоприемников 16 отражающих и неотражающих свет плоскостей. Такое выполнение датчи- 6 скорости вращения обеспечивает механическую связь его вращаемых и невращаемых частей с соответствующими частями роликового УЗ преобразователя 3. Кроме того, датчик 6 включает преобразователь (не показан) импульсного сигнала в аналоговый, вход которого соединен с фотоприемниками, а выход является выходом датчика 6. Функциональный преобразователь 7 включает в себя, например, последовательно соединенные защитный резистор 18, регулируемый аттенюатор 19 и регулируемый усилитель 20 с резистором 21, а также задатчик 22 нели- 5 нейности, включенный между землей и точкой соединения резистора 18 и
0 ка
аттенюатора 19. I
Входом функционального преобразо- вателя 7 является свободный контакт резистора 18, а выходом - выход регулируемого усилителя 20, второй вход которого соединен с выходом источника 9 опорного напряжения.
Сумматор 8 включает в себя, например, последовательно соединенные суммирующие резисторы 23, усилитель 24 и защитный диод 25. Входами сумматора 8 являются свободные контакты сум- 50 мирующих резисторов 23, а выходом - выход защитного диода 25. Регулируемый блок 4 усиления включает, например, последовательно соединенные регулируемый аттенюатор 26 и регулиру- 55 емьй усилитель 27 с резистором 28, а также задатчик 29 нелинейности,включенный между землей и регулирующим входом аттенюатора 26. Входом регулируемого блока 4 является регулируюищ вход аттенюатора 26, а выходом - выход регулируемого усилителя.
Позицией 30 на фиг. 1 и 2 обозначено контролируемое изделие. Функция F передачи функционального преобразователя 7 и коэффидиент К усиление регулируемого блока 4 усиления за-- даны следующими зависимостями:
- гг(
к, (и + 1)к„,
где .V) - функция, определяющая зависимость напряжения на выходе роликового УЗ преобразователя 3 от скорости V его вращения и коэффициента п
конструктивных парамет- 20 мого усагп1теля 27. При контроле в
и К ров;
напряжение на регулирующем входе блока 4 усиления;
коэффициент передачи блока 4 усиления при
и 0.
Устройство для УЗ контроля изделий работает следующим образом.
Генератор 1 возбуждает излучающий УЗ преобразователь 2, посылающий УЗ колебания в контролируемое изделие 30 Прошедшие через изделие 30 УЗ колебания поступают через эластичный протектор 12 и пустотелый ролик 11 на пьезоэлемент 13 приемного роликового УЗ преобразователя 3. В ходе контроля ролик 11 вращается относительно оси 10 со скоростью V, и УЗ преобразователь 3 обкатывает поверхность изделия 30. Пьезоэлемент 13 преобразователя 3 трансформирует принятые УЗ колебания в электрический сигнал. Фотоизлучатбши 15 датчика 6 скорости вращения генерируют световой пучок, отражающийся от соответствующих плоскостей модулятора 17 и поступающий в фотоприемники 16. Благодаря механически жесткой связи кронштейна 14, на котором установлены фотоизлучате- ли 13 и фотоприемники 16, с осью 10 и такой же связи модулятора 17 с роликом 11 электрический сигнал датчика 6 прямо пропорционален скорости V вращения УЗ преобразователя 3.
Напряжение с выхода датчика 6 скорости поступает на защитный резистор 18 функционального преобразователя 7 и далее на регулируемый атте
нюатор 19 и регулируемьш усилитель 20 этого же блока. Функция Р передачи функционального преобразователя 7 определяется задатчиком 22 нелинейности
и переменным резистором 21 регулируемого усилителя 20. С выхода функционального преобразователя 7 и источника 9 опорного напряжения сигналы по- поступают на суммируклцие резисторы 23
сумматора 8, с них на усилитель 24 этого блока и далее на защитньй диод 25. С выхода сумматора 8 и приемного УЗ преобразователя 3 сигналы поступают на аттенюатор 26 и далее на
регулируемый усилитель 27 регулируемого блока 4 усиления. Коэффициент Kj усиления регулируемого блока 4 у ния определяется задатчиком 29 н--ли- нейности и резистором 28 регулируе-t иле5
0 5
статичных условиях, функция передачи Е„
5
0
т.е. при V О, X , определяющая напряжение на выходе УЗ преобразователя 3, максимальна. При этом напряжение на выходе датчика 6 равно нулю, напряжение входа и выхода регулируе- Moi o усилителя 20 функционального преобразователя 7 минимально, напряжение на входе и выходе усилителя 24 сумматора 8 равно U , а напряжение на выходе блока 4 усиления при подаче на УЗ преобразователь 3 УЗ колебаний определенной амплитуды равно А (уровень сигнала от УЗ преобразователя 3 максимален, сопротивление сток-исток аттенюатора 26 блока 4 минимально). При контроле в динамичных условиях, т.е. при V О, функция F принимает меньшее значение Вследствие уменьшения фактической площади контактирования изделия 30 и эластичного протектора 12, что вызвано релаксационными свойствами последнего. При этом появляется напряжение на выходе датчика 6, которое увеличивает также напряжение на ВЬЕХО- дах аттенюатора 19 и усилителя 20 функционального преобразователя 7 и усилителя 24 сумматора 8, коэффициент KJ усиления блока 4 возрастает, а напряжение на выходе блока 4 усиления при подаче на УЗ преобразователь 3 УЗ колебаний той же определенной амплитуды остается неизменно равным А (уровень сигнала от УЗ преобразователя 3 падает, но возрастает сопротивление сток-исток аттенюатора 26 блока 4). С выхода блока 4 усиления сигнал, не зависящий от скорости V вращения УЗ роликового преобразователя 3, поступает в блок -5 обработки, включакяций автоматический сигнализатор дефектов и электроннолучевой индикатор импульсного УЗ ,де- фектоскопа общего назначения, в ре- зультате работы которого происходит определение качества контролируемого изделия 30.
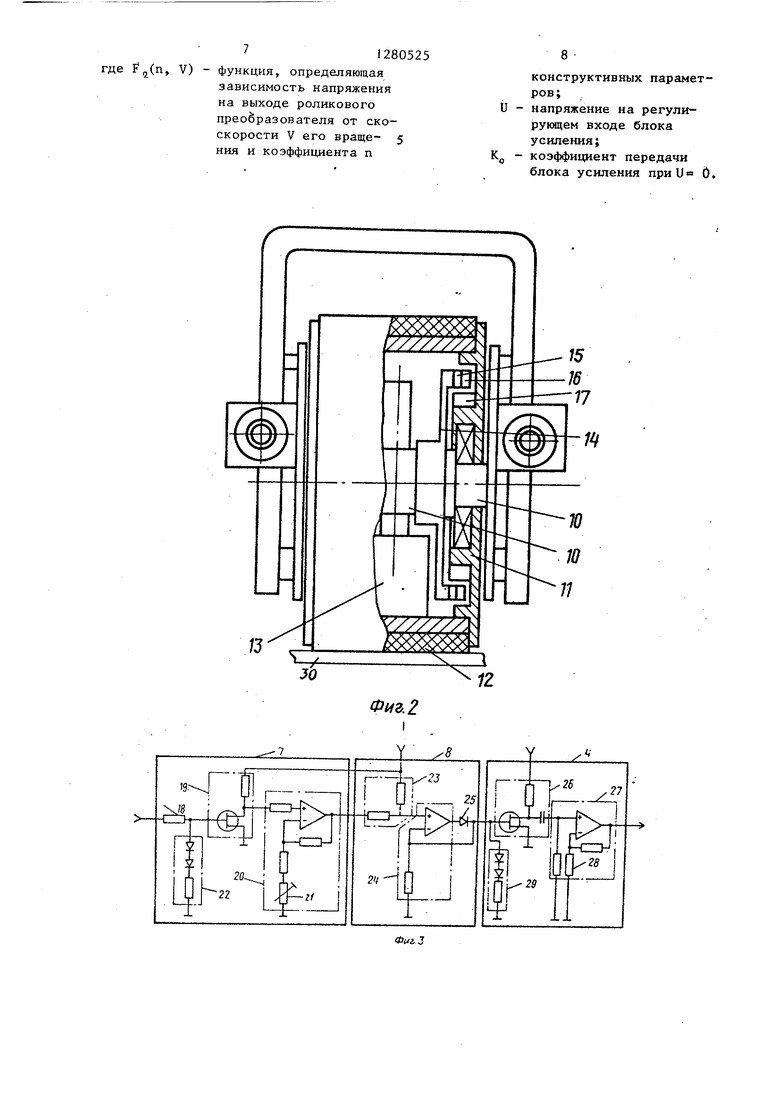
.Принцип работы устройства для УЗ контроля поясняется графиками, представленными на фиг, 4 и 5.
Семейство кривых зависимости функции Р„ передачи роликового УЗ преобразователя 3 с эластичным протекто- ром 12 от скорости V его вращения и коэффициента п его конструктивных параметров описывается формулой
Д F(V,n) l--- ,
где А и В -. экспериментально определяемые константы.
Коэффициент п конструктивных параметров роликового УЗ преобразова- теля 3 также определяется экспери- мент 1льно и зависит главным образом от типа эластомера протектора 12, его толщины и ширины наружного радиуса, ролика 11, силы прижатия преобра зователя 3 к поверхности контролируемого изделия 30 и шероховатости этой поверхности изделия 30. Для реальных роликовых УЗ преобразователей 3 с протектором 12 из полиуретана марки СКУ-В коэффициент п и константы А и В принимают следующие значения: п 0,5-3,0; А 3 и В 4, Результаты расчета функции t пере- дачи для реальных катящ1-гхся УЗ преобразователей представлены на фиг. 4 Также произведен расчет зависимости функщм F передачи функционального преобразователя 7 от напряжения U, на его входе при различных значениях коэффициента п конструктивных параметров пары реальных УЗ преобразователей (напряжение на выходе невращаемого УЗ преобразователя равно О,1 В коэффициент усиления блока 4 при V 0.равен 10; коэффициент преобразовния скорости вращения преобразователя 3 в напряжение датчиком 6 равен 1 с В). Результаты расчета представлены на фиг. 5.
Устройство для УЗ контроля изделий позволяет повысить надежность контроля за счет обеспечения автоматической регулировки чувствительнос
5
0
5
0
5
ти приемного тракта, которая компенсирует изменение фактической площади контакта эластичного протектора роликового УЗ преобразователя при изменении скорости контроля, вызываемое релаксационными свойствами эластомера, применяемого в качестве материала протектора. Релаксация протектора проявляется в росте деформации эластомера, происходящей после приложения неизменной нагрузки, а также в конечной скорости заполнения эластомером впадин шероховатой поверхности изделия, к которому прижат эластомер.Автоматическое регулирование чувствительности позволяет избежать перебраковку или недобраковку контролируемых изделий в случае изменения скорости контроля. Автоматическое регулирование чувствительности позволяет также избежать трудоемкой операции настройки устройства в динамическом режиме при контроле крупногабаритных изделий, вместо которой используются опе- рагщи статической настройки при не- вращаемых УЗ роликовых преобразователях.
Формула изобретения
1 . Устройство для ультразвукового контроля изделий, содержащее генератор, подключенный к нему излучающий преобразователь, и последовательно соединенные приемньй роликовый преобразователь с эластичньп протектором, блок усиления и блок обработки, о т- личающее с я тем, что, с целью повышения надежности контроля и упрощения настройки, оно снабжено последовательно соединенными датчиком скорости вращения, функциональным преобразователем и сумматором, вращаемые и невращаемые части роликового преобразователя и датчика скорости вращения механически связаны друг с другом, блок усиления выполнен регулируемым, а его регулирующий вход соединен с выходом сумматора.
2. Устройство по п. 1, отличающееся тем, что функция F, передачи функционального преобразователя и коэффициент К. усиления регулируемого блока усиления заданы следующими зависимостями:
F. (п, v)j
и + Ок,
KI
f-Cn, V) 1280525
функция, определяющая зависимость напряжения на выходе роликового преобразователя от ско- скорости V его враще- 5 ния и коэффициента п
8
конструктивных параметров ;
напряжение на регулирующем входе блока усиления; коэффициент передачи
блока усиления прии 0.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой дефектоскоп | 1985 |
|
SU1288586A1 |
| Устройство для контроля механических напряжений в твердых средах | 1990 |
|
SU1756815A1 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП "ЛАСТОЧКА" | 2001 |
|
RU2231783C2 |
| Ультразвуковой дефектоскоп | 1989 |
|
SU1640630A1 |
| Емкостно-кондуктометрический измеритель влажности | 1990 |
|
SU1784896A1 |
| Устройство для ультразвукового контроля параметров состава нефтепродуктов, перекачиваемых по трубопроводу | 1989 |
|
SU1665294A1 |
| УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕР ИЛИ ГЛУБИНОМЕР ДЕФЕКТОСКОПА | 1994 |
|
RU2082160C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА | 2000 |
|
RU2191360C2 |
| Устройство для определения расхода теплового ресурса электрической изоляции | 1990 |
|
SU1723530A1 |
| Зеркально-теневой ультразвуковой дефектоскоп | 1990 |
|
SU1744638A1 |

Изобретение относится к области акустических методов контроля и может быть использовано при ультразвуковой (УЗ) теневой дефектоскопии катящимися УЗ преобразователями с эластичным протектором. Целью изобретения является повышение надежности контроля и упрощение настройки за счет обеспечения автоматической регулировки чувствительности приемного тракта. УЗ катящийся преобразователь 3 принимает прошедшие через контролируемое изделие ЗЬ УЗ колебания и обкатывает последнее в ходе контроля. Датчик 6 скорости вращения, вращаемые и невращаемые части которого механически связаны с соответствующими частями УЗ преобразователя 3, генерирует сигналы, напряжение которых пропорционально скорости вращения УЗ преобразователя 3. С датчика 6 сигнал поступает на функциональный преобразователь 7 и через него на сумматор 8. На второй вход сумматора 8 поступают сигналы с выхода источника 9 опорного напряжения. На вход регулируемого блока 4 усиления поступают сигналы с УЗ преобразователя 3, а на регулирующий вход - с сумматора 8. Сигналы с датчика 6 изменяют- коэффициент усиления блока 4 таким образом, что он компенсирует изменение фактической площади контакта эластичного протектора роликового УЗ преобразователя 3, обусловленное релаксационными свойствами протектора при изменении скорости контроля. Амплитуда сигнала, поступающего в блок 5 обработки, остается неизменной при различной скорости контроля и постоянных акустических характеристиках контролируемого изделия 30. 1 з.п. ф-лы, 5 ил. I (Л 1C 00 о СП ts9 СД «г. /
Фиг. 2
Y 8
0.8
0.6
ОМ
0.2
0.2 . ач 0.6
Фиг.
,(л,1/; .
О
Й20.50.75 u,S
fuz.S
Составитель В. Гондаревский Редактор А. Долинич Техред Л.Олейник Корректор М. Демчик
Заказ 7061/49 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0.8 Ш.Кг/7 7
,f
| Патент США № 3423991, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
