1
Изобретение относится к сельскохозяйственному машиностроению, в частности к рг;-- бочим органам кул ьтиватс)К) в-плоско резов лля безотвальной обра()отк1 почвы.
Цель изобретения -- снижение тягового сонротивления.
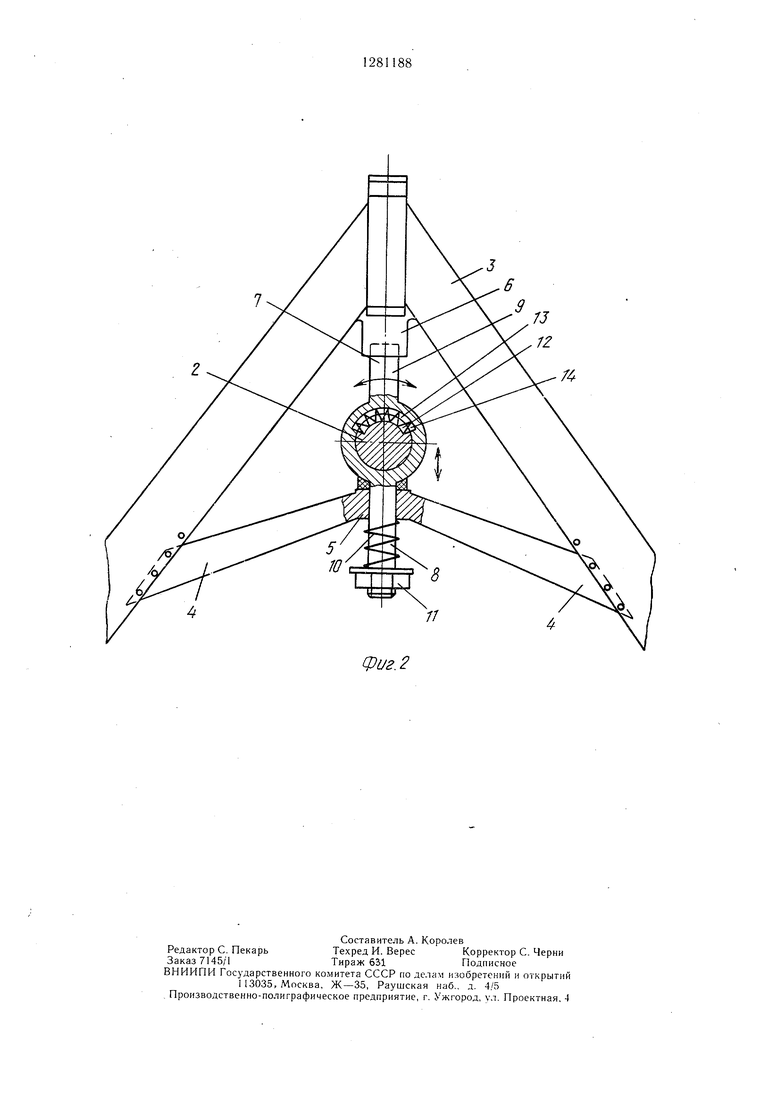
На фиг. 1 изображен рабочий орган культиватора-нлоскореза, вид сбоку, pasjica; на фиг. 2 - - то же, вид свер.ху.
Рабочий орган ку.||ьтиватора-плоскорез а содержит етойку 1 с пяткой 2, нлоекоре- жундую лану 3 с крыльяли; которой жестко связаны раскосы 4 с нолзупом 5 и труба 6 квадратного сечения, и Н1)одольную направляющую 7. Нанравляюншя 7 в своей центральной части шарнирно о.хватывает нятку 2, образуя вертикальный ии;п111дри- ческий HiapHHp, который нозволяет ляющей 7 с лапой 3 поворачиваться в горизонтальной нлоскости относительно стойки .
Один из концов 8 продольной нанрав;1я- югпей 7, имеющий круглое сечение, расположен в ползуне 5 .ланы 3, а дру1-ой ко- нец 9, имеющий квадратное сечение, расположен в трубе 6 лапы 3, образуя воз- вратно-постунательн) ю г.ару, с возможностью неремещения лапы 3 вдоль направляющей 7, которая нодпружинена относительно нее с помощью пружины 10, жесткость которой |)егулируется унорной гайкой 11.
В стойке 1 и центральной части нродоль- ной направляющей 7 выполнены располо- жен1Н:,1е напротив друг друга назы 12 и 13, в которых размещена пружина 11. которой лапы 3 подпружинены отноеительно стойки 1 в горизонтальной плоскости. Высога наза 13 больще диа.метра пружины 14, поэтому направляющая 7 с лапой 3 имеет возможность перемениться относительно нятки 2 стойки 1 в вертикальном нанрав- лении, при этом направляющая 7 подпружинена относительно стойки в этом направлении с номощью нружнны 15, жесткость которой регулируется унорной гайкой 16. Герметизация подвижных соединений рабочего органа обеснечивается защитными кожухами (не показаны).
Рабочий орган работает еледующим образом.
При движении рабочего органа культиватора-плоскореза в ночве из-за неоднородности ее физико-механическн.х свойств и разной степени уплотнення возникают разные по величине и направлению еилы сопротивления но всей нирнне захвата крыльев ланы 3, при этом последние устанав.ливаются но нанравлению равнодействую цей этих сил, новорачиваяеь относительно пятки 2 и нере
мещаясь но нанравляющей / в горизонтальной плоскости, преодолевая усилие пружин 14 и 10.
При встрече рабочего органа с нренят- ствием крылья ланы 3 отк. юняются в ето- рону, поворачиваясь в горизонтальной нлоскости, и дополнительно перемещаются вниз в вертикальной плоскости относительно нятки 2, преодолевая усилия пружины 15, в ре- зу;1ьтате чего смягчается удар и они огнбают нрепятствие с меньшими вертикальными нагрузками и тяговым сопротивлением рабочего органа, после чего под действием усилий пружин 14, 10 и 15 возвращаются в исходное положение.
В процессе заглубления и обработки сильно уплотненных ночв вертикально сос- тав.чяюнше силы реакции ночвы на крыльях ланы 3 периодически ежимают пружину 15 и вызывают нри этом их колебания, что увеличивает эффективность очищения их от
ночвы и растительных остатков и, тем самым, снижает тяговое сопротивление рабочего органа.
Установленные в рабочем органе и нагруженные в процессе работы пружины 10 и 14 в горизонтальной, а пружина 15 в вертикальной плоскостях нри переводе рабочего органа в транспортное положение разжи- маютея и фиксируют крылья лапы 3 в исходном симметричном относительно стойки 1 положении, что нозволяет улучщить транспортабельность агрегата и уеловия загл бле
ния рабочего органа в ночву, устраняя дополнительные усилия на крыльях от перекоса, и тем самым способствует повышению надежности работы культиватора-плоскореза.
35
Формула изобретения
1.Рабочий орган культиватора-плоскореза, включающий стойку с пяткой, продольную нанравляющую, соединенную с пяткой
0 посредством вертикального шарнира и плоскорежущую лапу, связанную с направляющей с возможноетью перемещения вдоль нее и подпружиненную относительно нее, отличающийся тем, что, с целью снижения тяг ового сопротивления, нанравляющая с ла5 пой установлена на вертикальном шарнире с возможностью вертикального перемещения относительно стойки и нодпружинена относительно стойки в этом направлении и в горизонтальной нлоскости.
2.Рабочий орган но п. 1, отличающийся тем, что пружина, связывающая нанравляющую и стойку в горизонтальной нлоскости, размепгена в горизонтальных пазах, выполненных в них напротив друг друга.
0
фиг. 2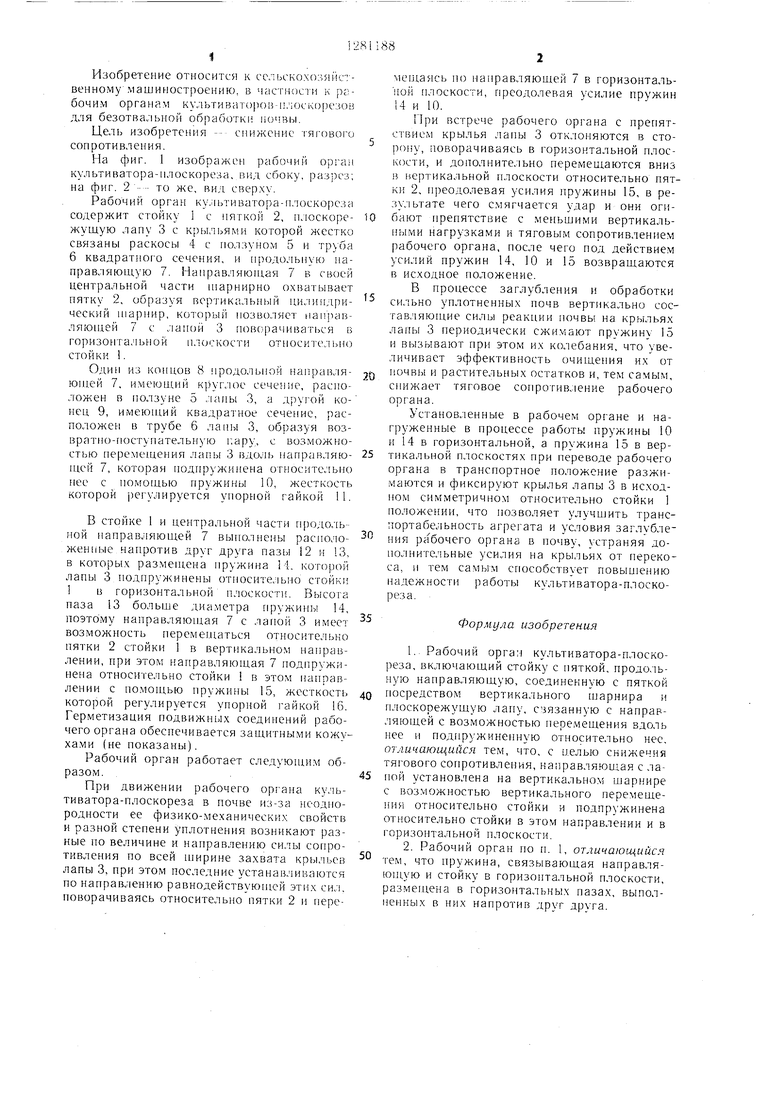
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган культиватора-плоскореза | 1983 |
|
SU1136754A1 |
| РАБОЧИЙ ОРГАН ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1973 |
|
SU407536A1 |
| Рабочий орган культиватора-плоскореза | 1972 |
|
SU445385A1 |
| Щелерезный рабочий орган для безотвальной обработки почвы | 1991 |
|
SU1806487A1 |
| РАБОЧИЙ ОРГАН КУЛЬТИВАТОРА-ПЛОСКОРЕЗА | 2017 |
|
RU2679162C1 |
| РАБОЧИЙ ОРГАН ОРУДИЯ ДЛЯ БЕЗОТВАЛЬНОЙ ОБРАБОТКИ ПОЧВЫ | 2012 |
|
RU2494589C1 |
| Рабочий орган культиватора | 1990 |
|
SU1722264A1 |
| КУЛЬТИВАТОР-ПЛОСКОРЕЗ | 2015 |
|
RU2591130C1 |
| РАБОЧИЙ ОРГАН КУЛЬТИВАТОРА-ПЛОСКОРЕЗА | 2024 |
|
RU2837404C1 |
| Активный рабочий орган культиватора | 1986 |
|
SU1501937A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к вибрационным рабочим органам культиваторов-плоскорезов, используемых для безотвальной обработки почвы. Цель изобре тения - снижение тягового сопротивления. Плоскорежущая лапа 3 культиватора установлена в продольной направляюшей 7, связанной посредством вертикального шарнира с пяткой 2 стойки 1 и смонтированной с возможностью перемещения вдоль стойки 1. Все соединения выполнены подвижными/и подпружиненными с помош.ью пружин 10, 14. 15. В процессе работы рабочего органа плоскорежущая лапа 3 совершает совместное колебательное движение в горизонтальной и вертикальной плоскостях. Колебания в вертикальной плоскости повышают эффективность очищения лап 3 от почвы и растительных остатков. 1 з.п. ф-лы, 2 ил. ю 00 00 00 7/ фас-.}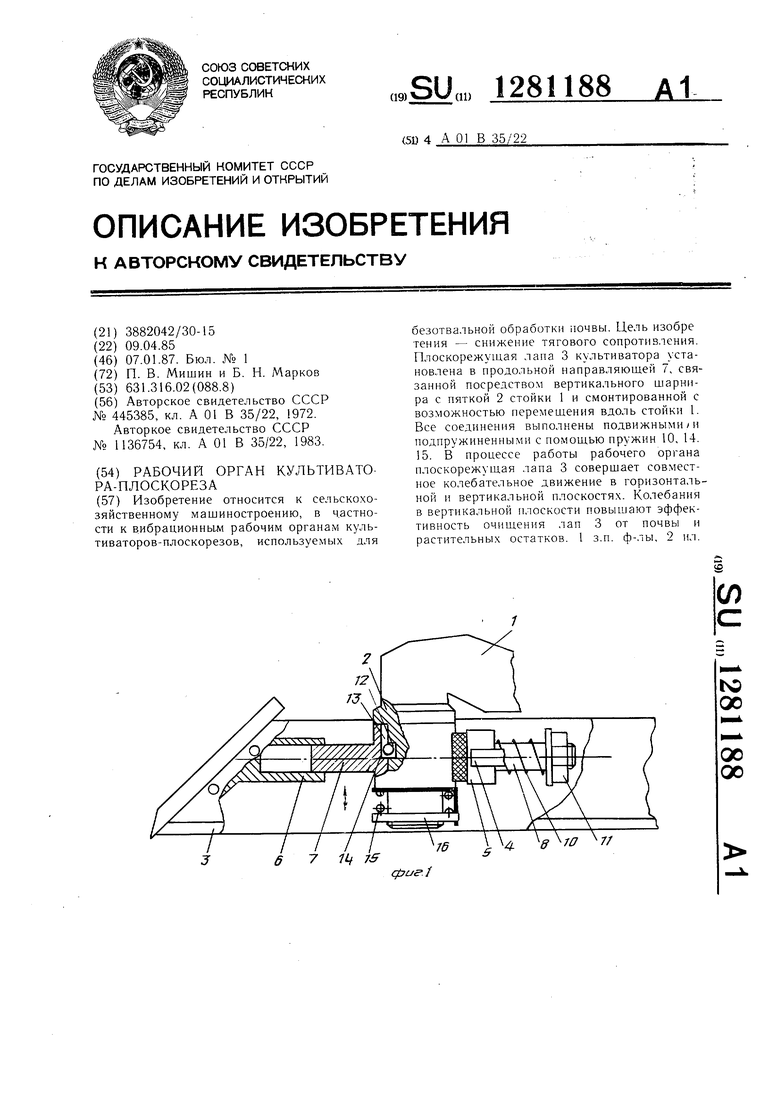
| Рабочий орган культиватора-плоскореза | 1972 |
|
SU445385A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочий орган культиватора-плоскореза | 1983 |
|
SU1136754A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
