Известные кварцевые упругие системы для бестермостатных гравиметров имеют существенные недостатки, заключающиеся в неудобстве изготовления их, в трудности выполнения юстировК и в невысокой точности и надежности в работе.
Описываемые кварцевые системы не имеют указанных недостатков. Достигается это тем, что для обеспечения полной температурной компенсации перемещений подвижной системы между металлической нитью, изменяющей свою длину с -изменением температуры, и маятником включен нелинейный элемент и притом так, что его действие передается через нити подвеса на маятник, а для уменьшения веса, размеров и устранения термостата в качестве нелинейных элементов применены рамки с крутильными нитями, угол закручивания которых изменяется нелинейно, или цилиндрические пружины, момент которых при изменении температуры изменяется также нелинейно.
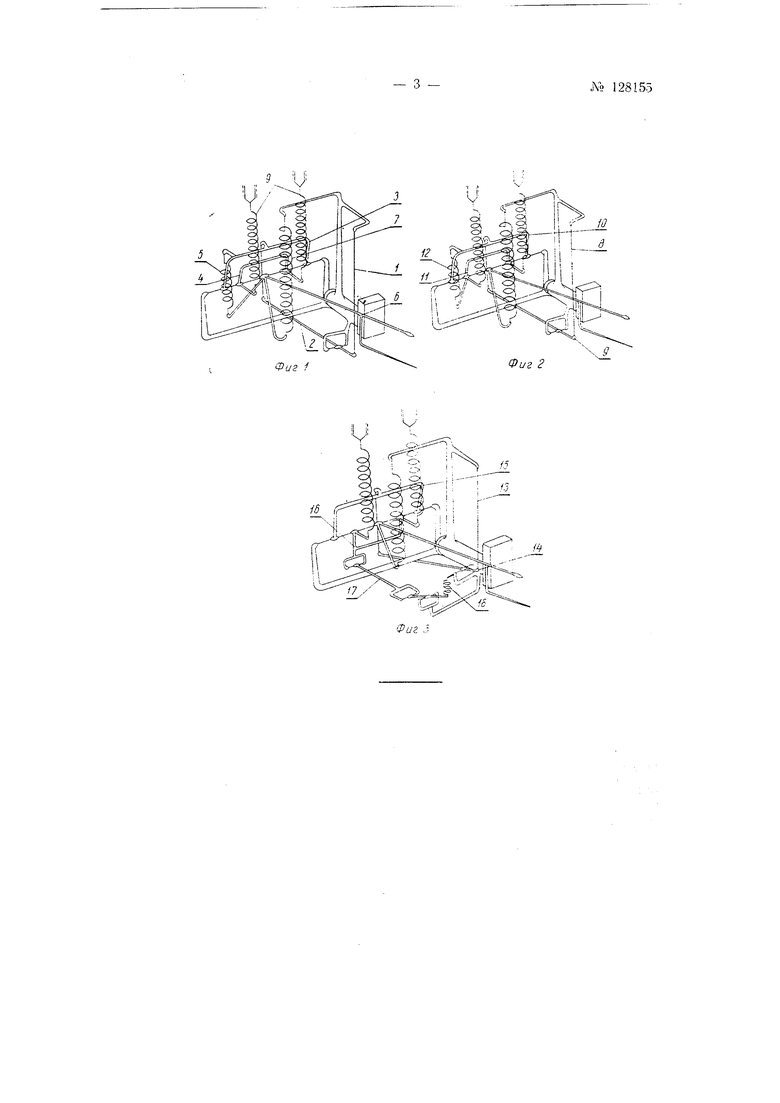
Схема устройства показана на фнг. 1, 2 и 3.
Компенсация криволииейности температурной кривой, обусловленной, главным образом, непропорциональностью зависимости изменения упругости кварца от изменения температуры, может быть осуществлена при помощи устройства, выполнен:и;ого по одному ;в трех вариантов.
В устройстве но первому варианту (фиг. 1) в температурном компенсаторе используется нелинейная система, передающая компенсирующее действие температурного компенсатора неносредственно на маятник гравиметра. Металлическая нить 1 при изменении температуры поворачивает рычаг 2, который, в свою очередь, поворачивает рамку 3. К рамке 3 или к рамке 4 прикреплен конец пружины 5, второй конец которой прикреплен к маятнику 6. Пружина 5 соединена так с рамкой 3 и маятником 6, что вторая производная момента ее по TeMnepatype будет отрицательной, т. е. мы имеем нелиней} ую систему, подобную системе с маятником Голицина. Вторая производная и более высокие производные момента пружины 5 (по температуре) равняться по величине второй и более высоким лроиззод}- ым разностн мo ;tнтoв пруж1 ны 7 и
128155- 2 -
пружины 5. Нити лодвеса маятника 6 должны быть достаточно тонки, чтобы их моментом сил можно было пренебречь по сравнению с моментом сил пружины 5.
В устройстве по второму варианту (фиг. 2) в температурном компенсаторе используется нелинейная система, передающая действие температурното компенсатора на ком-пенсационную (измерительную) рамку, которая создает крутильный момент нитей подвеса маятника, компенсирующий действие температуры.
Металлическая нить 8 при изменении температуры поворачивает рычаг 9, который, в свою очередь, поворачивает -подвижную рамку JO температурного компенсатора. Рамка 10 связана с компенсационной рамкой 11 пружиной 12. Вследствие этого поворот рамки 10 вызывает поворот рамки 11. Последняя закручивает нити подвеса маятника, что и приводит в итоге к компенсадии действия температуры. Пружина 12 закрепляется так же, как и в вертикальном сейсмогра1фе Голицина, т. е. вели- чина относительного изменения ее момента зависит от угла поворота рамки 10. Можно подобрать такую величину этого угла, чтобы все производные момента главной пружины по температуре равнялись таким же производным компенсирующего момента, но имели бы обратные знаки. Нити подвеса компенсационной рамки 11 должны быть настолько тонки, чтобы их моментом сил можно было .пренебречь по сравнению с моментом сил пружины 12.
В устройстве по третьему варианту (фиг. 3) в температурном компенсаторе также используется нелинейная система, передающая компенсирующее действие температурного компенсатора на компенсационную рамку, повороты которой создают крутильный момент нитей подвеса маятника, компенсирующий действие температуры.
Металлическая нить 13 в результате изменения температуры поворачивает рычаг 14, который, в свою очередь, поворачивает подвижную рамку 15 температурного компенсатора. Вместе с рамкой 15 поворачивается рамка 16. Поворотам рамки 16 препятствует внещняя сила, созданная приспособлением 17, состоящим из последовательно соединенных трех рамок и юстировочной пружины 18. Приспособление 17 может быть отрегулировано на заданную величину к криволинейности. Таким путем можно добиться того, чтобы производные момента главной пружины по температуре примерно равнялись производным момента закрл чивания нитей подвеса маятника.
Таким образом, описываемая кварцевая упругая система для термостатного гравиметра отличается от известных наличием рычажной металлической температурной компенсации, компенсирующей криволинейность зависимости изменения отсчета от изменения температуры.
Предмет изобретения
1.Бестермостатный гравиметр, содержащий маятник, пружину и металлическую нить, отличающийся тем, что для обеспечения полной температурной компенсации перемещений подвижной системы, между металлической нитью, изменяющей свою длину с изменением температуры, и маятником включен нелинейный элемент так, что его действие передается через нити подвеса на маятник.
2.Гравиметр по п. 1, отлич ающийся тем, что в качестве нелинейных элементов для обеспечения полной температурной компенсации, с целью уменьщения веса, размеров и устранения термостата, применены рамки с крутильными нитями, угол закручивания которых изменяется нелинейно, или цилиндрические пружины, момент которых при изменении температуры изменяется также нелинейно.

| название | год | авторы | номер документа |
|---|---|---|---|
| Кварцевый гравиметр | 1950 |
|
SU91878A1 |
| Термокомпенсационное устройство для безтермостатных гравиметров | 1959 |
|
SU129840A1 |
| Способ статического определения силы тяжести на море | 1954 |
|
SU103391A1 |
| Гравиметр | 1982 |
|
SU1080103A1 |
| СКВАЖИННЫЙ ГРАВИМЕТР | 1966 |
|
SU179486A1 |
| Гравиметр | 1979 |
|
SU1099302A1 |
| Термокомпенсированный кварцевый гравиметр | 1960 |
|
SU141641A1 |
| СПОСОБ ОТЛАДКИ ГРАДИЕНТОМЕТРА | 1964 |
|
SU165909A1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| Гравиметр | 1976 |
|
SU763831A1 |