Настоящее изобретение относится к области измерительной техники, а именно к прецизионным измерительным преобразователям для измерения ускорения свободного падения.
Известен гравиметр, содержащий корпус, маятниковый чувствительный элемент, соединенный с корпусом посредством крутильной нити подвеса, емкостный преобразователь положения чувствительного элемента, компенсационную винтовую пружину, соединяющую чувствительный элемент с корпусом, электростатический силовой преобразователь, счетнорешающее устройство, вход которого соединен с емкостным преобразователем положения, а выход с электростатическим силовым преобразователем [1]
Недостатком этого гравиметра является погрешность измерений, обусловленная нестабильностью упругих характеристик винтовой пружины.
Наиболее близким по технической сущности является гравиметр [2] содержащий корпус, маятниковый чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и кольцевой компенсационной катушкой на чувствительном элементе, усилитель с корректирующим фильтром и устройство частичной компенсации силы тяжести с элементами, расположенными на чувствительном элементе в магнитном поле постоянного магнита, причем к входу усилителя подключен датчик положения, а к его выходу компенсационная катушка.
Недостатком такого гравиметра является температурная погрешность измерения ускорения свободного падения вследствие температурного изменения магнитной индукции постоянного магнита.
Техническим результатом изобретения является повышение точности измерения ускорения свободного падения.
Указанный результат достигается в гравиметре, содержащем корпус, маятниковый чувствительный элемент с направлением его измерительной оси по вектору ускорения свободного падения, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и кольцевой компенсационной катушкой на чувствительном элементе, усилитель с корректирующим фильтром и устройство частичной компенсации силы тяжести с элементами, расположенными на чувствительном элементе в магнитном поле постоянного магнита, причем к входу усилителя подключен датчик положения, а к его выходу компенсационная катушка, тем, что в пластине с двумя параллельными друг другу основными поверхностями выполнен чувствительный элемент в виде подвижной рамки, отделенной от неподвижной рамки пластине, подвижная рамка и неподвижная рамка соединены между собой упругими перемычками, осями деформации упругих перемычек образована ось подвеса, подвижная рамка выполнена с расположением ее частей по обе стороны от оси подвеса, упругие перемычки в количестве по i (i 1,2.) расположены с каждой стороны подвижной рамки по направлению оси повеса, постоянный магнит выполнен в форме диска с диаметральным направлением намагниченности, компенсационная катушка прикреплена к одной основной поверхности подвижной рамки, к другой основной поверхности подвижной рамки прикреплено j (j 1,2.) грузов, грузы расположены на подвижной рамке по одной из сторон относительно оси подвеса, устройство частичной компенсации силы тяжести на чувствительном элементе выполнено в виде k (k 1,2.) накладок из магнитомягкого материала и n ( n 1,2.) накладок из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости, накладки из термомагнитного материала расположены на подвижной рамке относительно оси подвеса под одну сторону с грузами, накладки из магнитомягкого материала расположены на подвижной рамке по другую сторону от оси подвеса по сравнению с грузами, массы грузов, накладов из магнитомягкого материала и накладок из термомагнитного материала, расстояния их центров масс от оси подвеса, магнитные массы накладок из магнитомягкого материала и накладок из термомагнитного материала, расположение накладок в магнитном поле постоянного магнита выполнены так, что разность между действующими на подвижную рамку суммарным моментом сил тяжести грузов и накладок и суммарным моментом сил магнитного притяжения накладок к постоянному магниту, по крайней мере, на порядок меньше суммарного момента сил тяжести грузов и накладок.
В одном частном случае выполнения гравиметра накладки расположены на подвижной рамке на одной основной поверхности вместе с грузами.
В другом частном случае накладки на подвижной рамке расположены в полях рассеяния магнитного потока постоянного магнита.
В третьем частном случае выполнения гравиметра в корректирующем фильтре выполнена цепь с функцией преобразования интегрирующего звена в нижнем диапазоне частот полосы пропускания гравиметра.
В четвертом частном случае выполнения гравиметра пластина с подвижной и неподвижной рамками и упругими перемычками выполнена из монокристаллического материала, например кремния.
Путем выполнения в пластине чувствительного элемента в виде подвижной рамки, отделенной от неподвижной рамки в пластине, соединения подвижной и неподвижной рамок между собой упругими перемычками, выполнения подвижной рамки с расположением ее частей по обе стороны от оси подвеса, расположения упругих перемычек в количестве по i (i 1,2.) с каждой стороны подвижной рамки, выполнения постоянного магнита в форме диска с диаметральным направлением намагниченности, крепления компенсационной катушки к одной основной поверхности подвижной рамки, крепления к другой основной поверхности подвижной рамки j (j 1,2.) грузов, расположения грузов по одной из сторон относительно оси подвеса, выполнения устройства частичной компенсации силы тяжести на чувствительном элементе в виде k (k 1,2.) накладок из магнитомягкого материала и n (n 1,2.) накладок из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости, расположения накладок из термомагнитного материала на подвижной рамке по одну сторону с грузами относительно оси подвеса, а накладок из магнитомягкого материала по другую сторону от оси подвеса обеспечивается уравновешивание компенсационным моментом, создаваемым магнитоэлектрическим силовым преобразователем, разности двух моментов: механического момента от сил тяжести грузов и накладок и момента сил магнитного притяжения накладок. При этом при изменении магнитного потока постоянного магнита из-за изменения температуры окружающей среды увеличение или уменьшение создаваемого силой магнитного притяжения накладок из магнитомягкого материала момента компенсируется соответственно увеличением или уменьшением момента, создаваемого силой магнитного притяжения накладок из термомагнитного материала вследствие изменения магнитной проницаемости накладок из термомагнитного материала. В результате компенсационный момент магнитоэлектрического силового преобразователя остается постоянным в диапазоне рабочих температур гравиметра, сохраняется постоянство выходного сигнала гравиметра, повышается точность измерения ускорения свободного падения вследствие устранения температурной погрешности.
Путем выполнения масс грузов и накладок, магнитных масс накладок, расположения центров масс грузов и накладок относительно оси подвеса, расположения накладок в магнитном поле постоянного магнита таким образом, чтобы разность между действующими на подвижную рамку суммарным моментом сил тяжести грузов и накладок и суммарным моментом сил магнитного притяжения накладок к постоянному магниту была, по крайней мере, на порядок меньше суммарного момента сил тяжести грузов и накладок, обеспечивается компенсация действующего на подвижную рамку момента сил тяжести моментом сил магнитоэлектрического силового преобразователя за счет меньшего тока, протекающего через компенсационную катушку. Поэтому при небольшом диапазоне приращения ускорения свободного падения обеспечивается большой диапазон изменения выходного напряжения гравиметра, получаемого на его выходе путем включения последовательно с компенсационной катушкой масштабного резистора с большой величиной сопротивления. Вследствие этого повышается точность измерения ускорения свободного падения.
При расположении накладок на подвижной рамке в полях рассеяния магнитного потока постоянного магнита повышается точность измерения ускорения свободного падения, так как обеспечивается большая точность компенсации температурной погрешности гравиметра вследствие меньшего влияния допусков на геометрические размеры накладок.
Посредством выполнения в корректирующем фильтре цепи с функцией преобразования интегрирующего звена в нижнем диапазоне частот полосы пропускания гравиметра обеспечивается повышенная точность компенсации силы тяжести вследствие постоянства взаимного положения подвижной и неподвижной рамок при измерении ускорения свободного падения. Поэтому повышается точность измерения ускорения свободного падения с помощью гравиметра.
При выполнении пластины с подвижной и неподвижной рамками и упругими перемычками из монокристаллического кремния повышается точность измерения ускорения свободного падения вследствие высокой стабильности упругих констант монокристаллического кремния и вызванной этим стабильностью коэффициента преобразования гравиметра.
На фиг.1 представлен общий вид гравиметра.
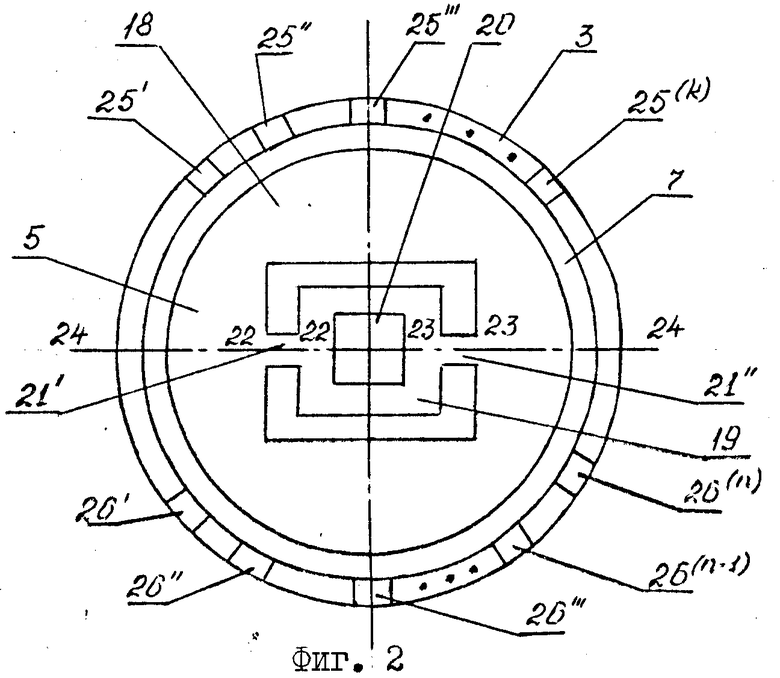
На фиг.2 дан вид пластины с одной ее основной поверхности.
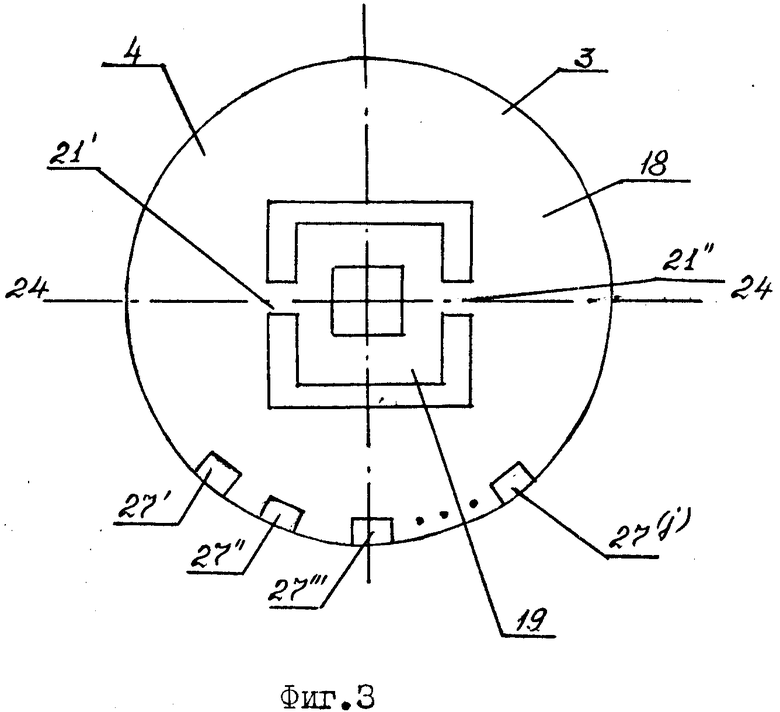
На фиг.3 показан вид пластины с другой ее основной поверхности.
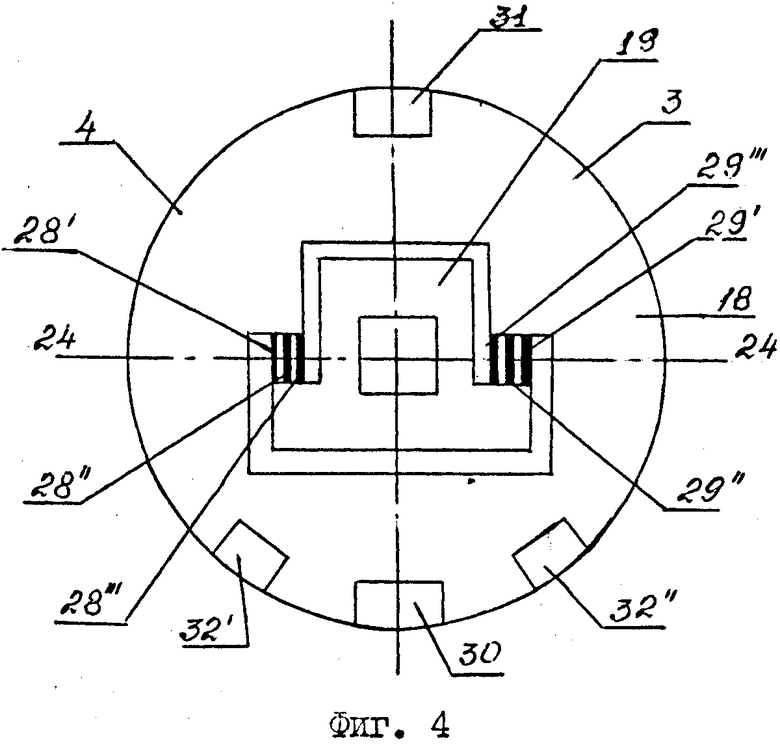
На фиг.4 показан частный случай выполнения пластины.
На фиг.5 приведена конструкция постоянного магнита.
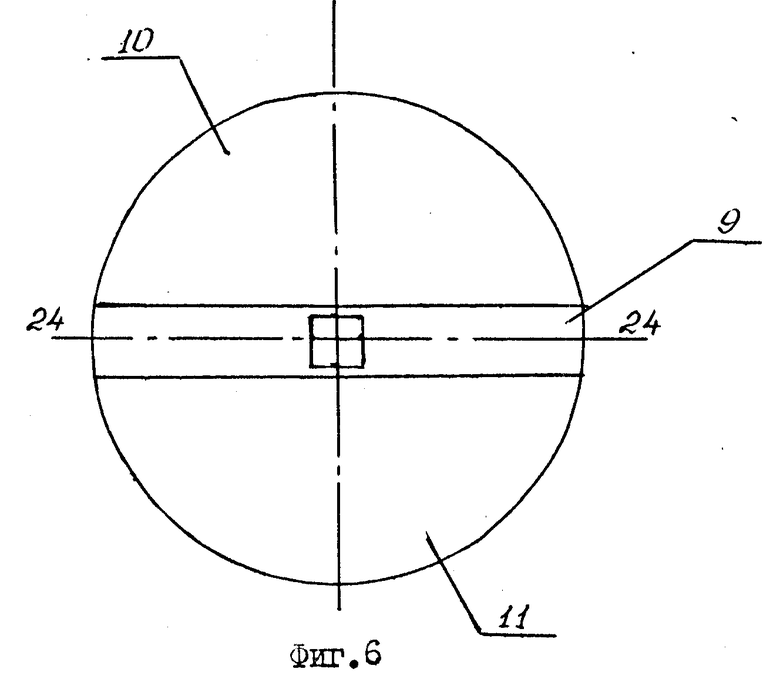
На фиг. 6 показано выполнение неподвижных электродов датчика положения емкостного типа.
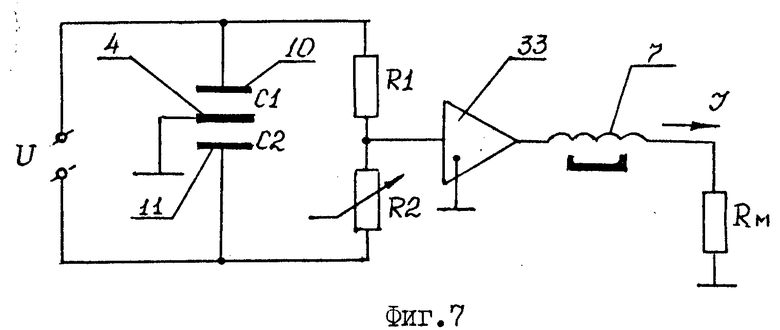
На фиг.7 дана электрическая схема гравиметра.
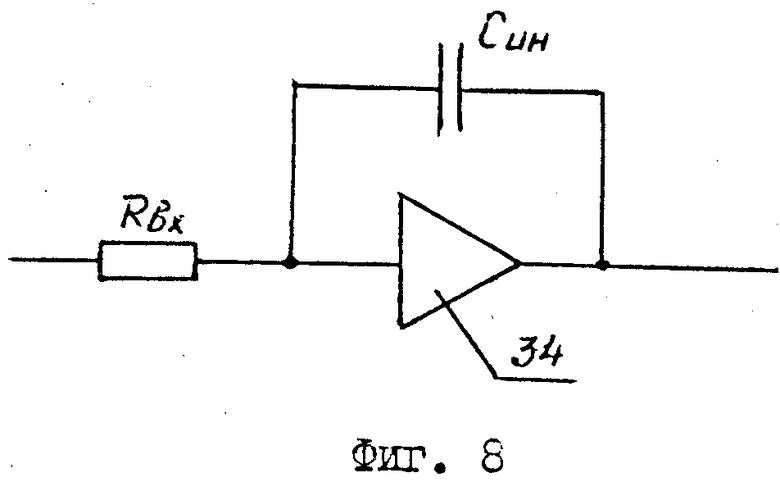
На фиг.8 показана схема корректирующего фильтра.
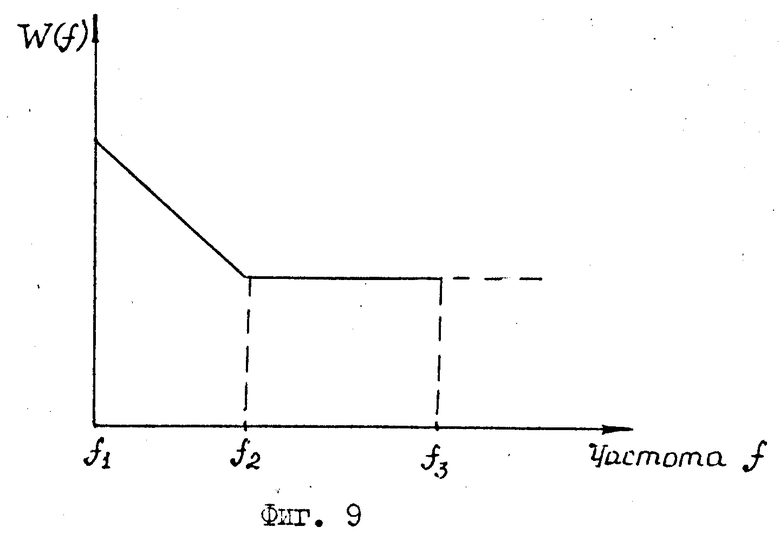
На фиг. 9 приведена частотная характеристика усилителя с корректирующим фильтром.
В мультисенсоре (фиг.1) в корпусе 1 со стойкой 2 установлены пластина 3 с параллельными друг другу основными поверхностями 4, 5 и постоянный магнит 6 магнитоэлектрического силового преобразователя. На пластине 3 на ее основной поверхности 5 в рабочем зазоре магнитоэлектрического силового преобразователя установлена кольцевая компенсационная катушка 7, а на основной поверхности 4 груз 8.
Магнитный поток постоянного магнита 6 замыкается через рабочий зазор с компенсационной катушкой 7 и корпус 1.
На стойке 2 также закреплена плата 9 с неподвижными электродами 10, 11 датчика положения емкостного типа. В магнитном поле постоянного магнита 6 установлены накладка 12 из магнитомягкого материала и накладка 13 из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости. В корпусе 1 выполнен фланец 14 с отверстиями 15', 15'' для крепления гравиметра к объекту, в котором он используется. Гравиметр закрыт крышкой 16.
Ось 17 17 является измерительной осью гравиметра, и она перпендикулярна основным поверхностям 4, 5 пластины 3.
Накладки 12, 13 расположены на основной поверхности 5 пластины 3 вместе с компенсационной катушкой 7. Накладка 12 расположена по одну сторону от оси 17 17, а накладка 13 расположена по другую сторону от оси 17 17 вместе с грузом 8.
Массы груза 8 и накладок 12, 13, расстояния их центров масс от оси 17 - 17, магнитные массы накладок 12, 13 выполнены так, чтобы разность между суммарным моментом сил тяжести груза 8 и накладок 12, 13 и суммарным моментом сил магнитного притяжения накладок 12, 13 к постоянному магниту 6 была, по крайней мере, на порядок меньше момента силы тяжести груза 8 и накладок 12, 13.
В пластине 3 (фиг.2) выполнена подвижная рамка 18 и неподвижная рамка 19 с окном 20. Подвижная рамка 18 и неподвижная рамка 19 соединены между собой посредством упругих перемычек 21', 21''. Ось кручения 22 22 упругой перемычки 21 и ось кручения 23 23 упругой перемычки 21' образует ось подвеса 24 24 подвижной рамки 18, которая делит подвижную рамку 18 на две части.
Компенсационная катушка 7 магнитоэлектрического силового преобразователя расположена на основной поверхности 5 подвижной рамки 18.
В общем случае выполнения гравиметра на основной поверхности 6 подвижной рамки 18 по одну сторону от оси подвеса 24 24 расположены накладки 25', 25'' 25(k) из магнитомягкого материала, по другую сторону от оси подвеса 24 24 расположены накладки 26', 26'' 26(n) из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости.
На второй основной поверхности 4 (фиг.8) подвижной рамки 18 по ту же сторону от оси подвеса 24 24, что и накладки 26', 26'' 26(m), расположены грузы 27', 27'' 27(j).
Массы грузов 27', 27'' 27(j), накладок 25', 25' 25(k) из магнитомягкого материала, накладок 26', 26'' 26(n) из термомагнитного материала, расстояния их центров масс от оси подвеса 24 - 24, магнитные массы накладок 25', 25'' 25(k), 26', 26'' 26(n) и их расположение в магнитном поле постоянного магнита 6 выполнены так, чтобы разность между действующими относительно оси подвеса 24 24 на подвижную рамку 18 суммарным моментом сил тяжести грузов 27', 27'' 27(j), накладок 25', 25'' 25(k), 26', 26' 26(n) и суммарным моментом сил магнитного притяжения к постоянному магниту 6 накладок 25', 25'' 25(k), 26', 26'' 26(n) была меньше, по крайней мере, на порядок суммарного момента сил тяжести грузов 27', 27'' 27(j) и накладок 25', 25'' 25(k), 26', 26'' 26(n).
В гравиметре (фиг. 4) с любым количеством упругих перемычек между подвижной рамкой 18 и неподвижной рамкой 19 в пластине 3 подвижная рамка 18 соединена с одной стороны с неподвижной рамкой 19 упругими перемычками 28', 28'', 28''', а с другой стороны упругими перемычками 29', 29'', 29'''. Продольные оси упругих перемычек 28', 28'', 28''', 29', 29'', 29''' расположены перпендикулярно оси подвеса 24 24, ось подвеса 24 24 образована осями изгиба этих упругих перемычек.
Здесь же в частном случае выполнения гравиметра на основной поверхности 4 подвижной рамки 18 вместе с грузом 30 расположены накладка 31 из магнитомягкого материала и накладки 32', 32'' из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости. Накладки 32', 32'' находятся по одну сторону от оси подвеса 24 24 вместе с грузом 30, накладка 31 находится по другую сторону от груза 30 относительно оси подвеса 24 24. Накладки 31, 32', 32'' расположены в полях рассеяния магнитного потока постоянного магнита 6, так как основная поверхность 4 пластины 3 расположена в противоположной стороне от постоянного магнита 6.
Накладки 13, 26', 26'' 26(n), 32', 32'' могут быть изготовлены из термомагнитного материала, например марки ТКМ-09.
При выполнении пластины 3 из монокристаллического кремния подвижная рамка 18, неподвижная рамка 19, упругие перемычки 21', 21'' или 28', 28'', 28''', 29', 29'', 29''' образуются путем анизотропного травления кремния.
Постоянный магнит 6 (фиг.5) выполнен дисковой формы с диаметральным направлением намагниченности N-S.
Неподвижные электроды 10, 11 датчика положения емкостного типа выполнены в виде металлизированных поверхностей, образованных в плате 9 из электроизоляционного материала, например поликора (фиг.6).
Датчик положения (фиг.7) по мостовой схеме образован конденсаторами C1, C2 и резисторами R1, R2 и запитывается напряжением U переменного тока. Конденсатор C1 образован неподвижным электродом 10 на плате 9 и электропроводной основной поверхностью 4 пластины 3. Конденсатор C2 образован неподвижным электродом 11 на плате 9 и электропроводной основной поверхностью 4 пластины 3.
Электропроводная основная поверхность 4 получается при изготовлении пластины 3 из электропроводного материала. При изготовлении пластины 3 из монокристаллического кремния электропроводная основная поверхность 4 получается путем легирования кремния бором.
Выход датчика положения подключен к входу усилителя 33, к выходу которого подключена компенсационная катушка 7 магнитоэлектрического силового преобразователя, соединенная с масштабным резистором Rм.
В корректирующем фильтре (фиг.8), выполненном на операционном усилителе 34, между входным резистором Rвх и выходом операционного усилителя 34 включен конденсатор Cин. Посредством цепи, состоящей из входного резистора Rвх и конденсатора Cин, в корректирующем фильтре выполнено интегрирующее звено, в результате чего функция преобразования W(f) усилителя 33 с корректирующим фильтром имеет вид, показанный на фиг.9. Здесь f1 представляет частоту начала интегрирования, f2 частоту окончания интегрирования, f3 верхнюю частоту полосы пропускания усилителя.
Гравиметр (фиг. 1) работает следующим образом. При установке измерительной оси 17 17 гравиметра по вектору ускорения свободного падения силами тяжести груза 8 и накладок 12, 13 относительно оси подвеса 24 24 создается действующий на подвижную рамку 18 момент механических сил Mм:
Mм (m1l1 + m2l2 - m3l3)g,
где m1, m2, m3 массы груза 8, накладки 13 и накладки 12 соответственно;
l1, l2, l3 расстояние от оси подвеса 24 24 до центра масс груза 8, накладки 13 и накладки 12 соответственно;
g ускорение свободного падения.
В то же время на подвижную рамку 18 действует момент магнитного притяжения M? вследствие магнитного взаимодействия накладок 12, 13 с полем постоянного магнита 6:
где B магнитная индукция постоянного магнита 6;
mм1, mм2 магнитные массы накладок 12, 13 соответственно;
μ1 магнитная проницаемость накладки 12;
μ2 магнитная проницаемость накладки 13.
В результате на подвижную рамку 18 действует результирующий момент Mp:
Mp=Mм-Mт
При этом
M?=aMm,
где a коэффициент компенсации силы тяжести (0,9≅a < 1).
Тогда
Mp=Mм(1-a)
Под действием результирующего момента Mp происходит угловое перемещение подвижной рамки 18 относительно неподвижной рамки 19. При этом изменяются расстояния между неподвижными электродами 10, 11 датчика положения и электропроводной основной поверхностью 4 подвижной рамки 18. Емкости конденсаторов C1, C2(фиг.7) изменяются, и с выхода мостовой схемы датчика положения поступает сигнал на вход усилителя 33. После усиления и преобразования сигнала в усилителе 33 через компенсирующую катушку 7 и масштабный резистор Rм проходит ток I. Магнитное поле тока I взаимодействует с магнитным полем постоянного магнита 6, в результате чего в магнитоэлектрическом силовом преобразователе создается компенсационный момент Mк:
Mк=KI,
где K коэффициент преобразования магнитоэлектрического силового преобразователя.
Посредством компенсационного момента Mк уравновешивается результирующий момент Mp, т.е.
Mк=Mp
При подставке в (7) выражений (5), (6) получим для тока I:
Так как коэффициент a меньше единицы, то проходящий через компенсационную катушку 7 и масштабный резистор Rм ток меньше по своему значению тока, необходимого для компенсации силы тяжести груза 8. Поэтому при изменении ускорения свободного падения с помощью гравиметра требуется меньшее значение тока, проходящего через компенсационную катушку 7 и масштабный резистор Rм. При большом значении сопротивления масштабного резистора Rм изменения тока компенсационной катушки 8, вызванные вариацией ускорения свободного падения, приводят к большим изменениям напряжения на масштабном резисторе Rм. Таким образом повышается точность измерения ускорения свободного падения.
При изменении температуры окружающей среды изменяется магнитная индукция постоянного магнита 6:
B = Bo(1 - α1ΔT), (9)
где B0 номинальное значение магнитной индукции при нормальной температуре окружающей среды;
α1 температурный коэффициент магнитной индукции;
ΔT изменение температуры окружающей среды.
При этом изменяется магнитная проницаемость накладки 13 из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости:
где  номинальная магнитная проницаемость накладки 13 при номинальной температуре;
номинальная магнитная проницаемость накладки 13 при номинальной температуре;
α2 температурный коэффициент магнитной проницаемости накладки 13.
Так как момент Mм от сил тяжести практически не зависит от температуры окружающей среды, то рассмотрим изменение момента Mт магнитного притяжения накладок 12, 13.
Подставив в (2) выражения (9), (10), получим для момента M'т при изменении температуры окружающей среды:
Преобразовав
получим:
При номинальной температуре окружающей среды момент притяжения  :
:
Сравнивая выражения (13) и (14), получим условие постоянства момента притяжения в диапазоне рабочих температур гравиметра:
Так как температурные коэффициенты α1, α2 малы, то первым членом выражения (15) можно пренебречь ввиду его второго порядка малости. Тогда условие компенсации температурного изменения момента тяжения будет иметь вид:
Как следует из выражения (16), подбирая магнитные массы накладок 12, 13, их положение относительно оси подвеса 24-24, возможно добиться сохранения постоянства показаний гравиметра в диапазоне рабочих температур гравиметра.
В общем случае выполнения гравиметра (фиг.2, 3) момент Mм от сил тяжести создается грузами 27', 27". 27(j), накладками 26', 26". 26(n) из термомагнитного материала и накладками 25', 25". 25(k) из магнитомягкого материала. Момент Mт магнитного притяжения создается взаимодействием с полем постоянного магнита 6 накладок 25', 25". 25(k), 26', 26". 26(n). При этом изменение магнитного притяжения накладок 25', 25".25(k) из-за изменения магнитной индукции с температурой окружающей среды компенсируется изменением магнитного притяжения накладок 26', 26". 26(n).
При размещении накладки 31 из магнитомягкого материала и накладок 32', 32" из термомагнитного материала (фиг.4) в полях рассеяния магнитного потока постоянного магнита 6, где магнитная индукция меньше, чем в рабочем зазоре магнитоэлектрического силового преобразователя, в соответствии с соотношением (14) для создания момента магнитного притяжения той же величины требуются накладки большей массы. Поэтому обеспечивается более точное изготовление накладок вследствие меньшего отношения допусков на изготовление к размерам вследствие меньшего отношения допусков на изготовление к размерам накладок. В результате повышается точность компенсации силы тяжести.
При выполнении корректирующего фильтра в соответствии с фиг.8 момент магнитного притяжения остается постоянным, так как практически отсутствует перемещение подвижной рамки 18 при изменении ускорения свободного падения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| ГРАВИМЕТР | 2003 |
|
RU2242032C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КРУТИЗНЫ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2028001C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
Использование: в области измерительной техники для повышения точности измерения ускорения свободного падения. Сущность изобретения: в гравиметре, содержащем корпус, маятниковый чувствительный элемент, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель с корректирующим фильтром и устройство частичной компенсации силы тяжести, чувствительный элемент выполнен в пластине в виде подвижной и неподвижной рамок, постоянный магнит выполнен в форме диска с диаметральным направлением намагниченности, на подвижной рамке расположены грузы, накладки из магнитомягкого материала, накладки из термомагнитного материала с отрицательным температурным коэффициентом магнитной проницаемости, накладки из термомагнитного материала расположены вместе с грузами по одну сторону от оси подвеса, накладки из магнитомягкого материала расположены по другую сторону от оси подвеса. 4 з.п. ф-лы, 9 ил.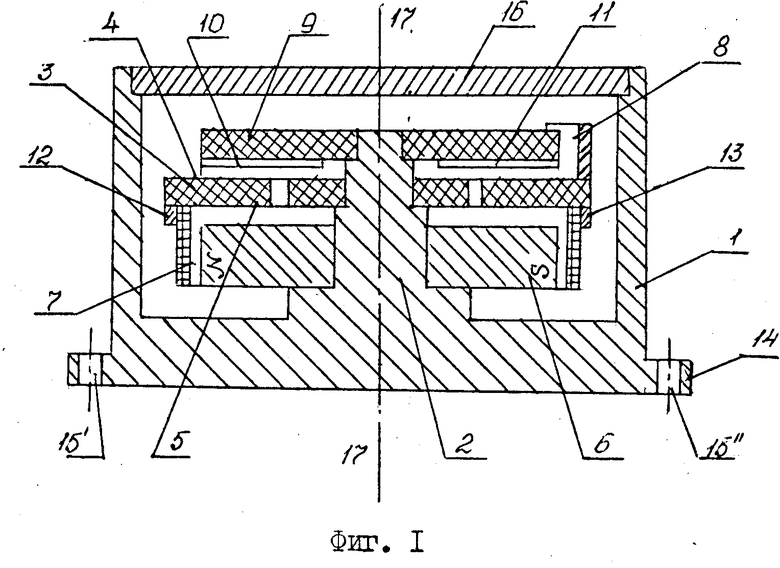
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ГРАВИМЕТР | 0 |
|
SU193100A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения силы тяжести | 1974 |
|
SU575596A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
