Изобретение относится к измерительной технике и может быть использовано для угловых поворотов объекта в машино- и приборостроении.
Цель изобретения - повьшение достоверности измерения за счет повышения частоты измерения углового положения контролируемого вала.
На чертеже приведена принципиальная схема предлагаемого устройства.
Устройство содержит платформу 1, датчик 2 угловой скорости, например кольцевой лазер, фотоэлектрические автоколлиматоры 3 и 4, две многогранные отражающие призмы 5 и 6, блок 7 обработки, блоки 8 и 9 фиксации базовых (первых) граней многогранных призм и контролируемый вал 10.
На поворотной платформе 1 установлен датчик 2:угловой скорости и фотоэлектрические автоколлиматоры 3 и 4, один из которьпс оптически связан с неподвижной многогранной призмой 5, а второй - с подвижной многогранной призмой 6, скрепленной с контролируемым валом 10.
На :поворотной платформе 1 также установлены блоки В и 9 фиксации базовых граней многогранных призм, которые могут быть выполнены, например, на основе индуктивных датчиков. В этом случае вблизи базовых граней многогранных призм 5 и 6 устанавливаются элементы, например, из ферромагнитного материала.
Выходы фотоэлектрических автоколлиматоров 3 и 4, кольцевого лазера 2 и блоков 8 и 9 фиксации базовой грани подключены к входу блока 7 обработки.
Устройство работает следующим образом.
Приводят во вращение поворотную платформу 1, при вращении которой блок 8 фиксации базовой грани регистрируют момент времени, когда в поле зрения фотоэлектрического автоколлиматора появляется базовая (первая) грань многогранной призмы 6. Электрический сигнал, свидетельствующий об этом, поступает в блок 7 обработки. Фотоэлектрический автоколлиматор 3 фиксирует момент прохождения базовой грани и при дальнейшем вращении поворотной платформы 1 фиксирует моменты прохождения нормалей к всем остальным граням многогранной призмы 6. Сигналы с выхода фотоэлектрического автоколлиматора 3 поступа- ют в блок 7 обработки.
Аналогичным образом в блок обработки поступают сигналы с блока 9
фиксации базовой грани многогранной призмы 5 и сигналы фотоэлектрического автоколлиматора 4, соответствующие моментам фиксации нормалей к граням многогранной призмы 5. Одновременно
с датчика 2 угловой скорости в блок 7 обработки поступает сигнал, пропорциональный угловой скорости поворотной платформы 1.
В блоке 7 обработки вычисляют угол
между п-й гранью многогранной призмы 5 и п-й гранью многогранной призмы 6 по зависимости
)(t)dt, п 1,2,3 ...N,
tn
где между гранью неподвижной призмы 5 и п-й гранью подвижной призмы 6; t - момент фиксации нормали к ; П-Й Грани неподвижной призмы 5;
- момент фиксации нормали к п-й грани подвижной призмы 6;
uj(t) - скорость вращения поворотной платформы; t - текущее время; N - число граней многогранной
призмы.
В результате за Два оборота поворотной платформы 1 (при произвольном . взаимном положении базовых граней многогранных призм) в блоке 7 обработки определяют N значений Ы , ха- рактеризующих угловое положение вала. После поворота контролируемого вала , 10 на произвольный угол р повторяют цикл измерения, вычисляют N новых значений of. , определяют угол поворо- та контролируемого вала из зависимости
м с и- пУсреднение угла поворота позволяет уменьшить случайную составляющую ошибки, что способствует повышению достоверности контролируемого параметра.
Формула изобретения
Устройство для измерения угла поворота вала, содержащее платформу, устанавливаемую с возможностью вра3 12818794
щения вокруг оси, совпадающей с осьюиз автоколлиматоров соответственно,
контролируемого вала, два фотоэлект-отличающееся тем, что,
рических автоколлиматора, один изс целью повьппения достоверности изме- которых установлен на платформе, блок рения, оно снабжено датчиком углообработки, электрически соединенный.5 вой скорости, выполненным в виде
с выходами обоих автоколлиматоров, икольцевого лазера, выход которого
две многогранные отражающие призмы,электрически соединен с блоком обраодна из которых предназначена дляботки, обе многогранные призмы выскрепления с контролируемым валом,полнены с равным числом отражающих
призмы установлены таким образом,fO граней, датчик угловой скорости и
что их геометрические оси совпадаютвторой автоколлиматор установлены на
с осью вращения платформы и каждаяплатформе, а вторая многогранная
из них оптически сопряжена с однимпризма установлена неподвижно.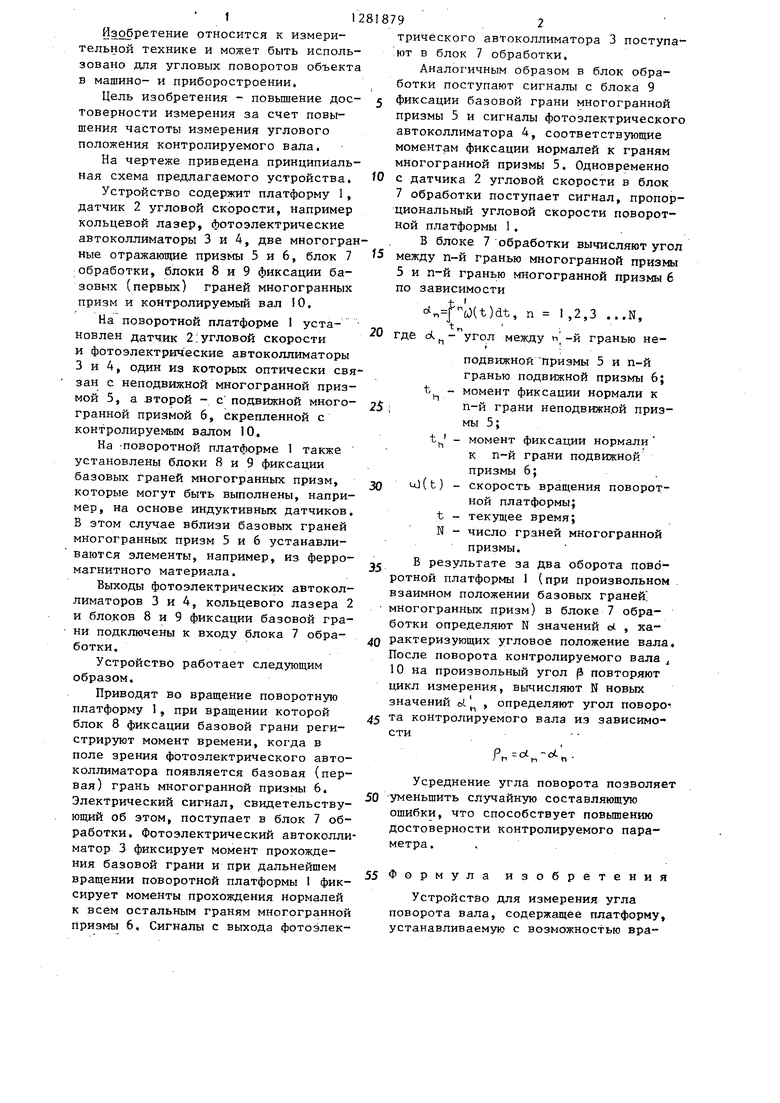
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический гониометр-спектрометр | 1987 |
|
SU1495642A1 |
| Автоматизированный гониометр | 1982 |
|
SU1100500A1 |
| Способ измерения углов между двумя отражающими поверхностями | 1987 |
|
SU1515038A1 |
| Автоматизированный гониометр | 1982 |
|
SU1196685A1 |
| Способ контроля фотоэлектрических автоколлиматоров | 1986 |
|
SU1442824A1 |
| Способ измерения показателя преломления оптического стекла | 1987 |
|
SU1511647A1 |
| Устройство для измерения плоских углов многогранных призм | 1982 |
|
SU1221491A1 |
| Устройство для измерения угла поворота вала | 1988 |
|
SU1696856A1 |
| Автоматизированный гониометр для измерения плоских углов многогранных призм | 1989 |
|
SU1640549A1 |
| Способ измерения показателя преломления оптического стекла | 1987 |
|
SU1578599A1 |
Изобретение позволяет повысить достоверность измерения угла поворота вала за счет увеличения частоты измерения его угловых положений. Приводят во вращение платформу 1, с которой скреплены датчик угловой скорости 2, выполненньй в виде кольцевого лазера, и два фотоэлектрических автоколлиматора 3,4, каждый из которых оптически сопряжен с одной из : двух многогранных отражающих призм 5,6, Одна из призм скреплена с контролируемым валом 10, а другая установлена неподвижно. При непрерывном вращении платформы I кольцевой лазер 2 вырабатывает электрический сигнал, пропорциональный угловой скорости, а фотоэлектрические автоколлиматоры регистрируют моменты совпадения нормалей к граням соответствующей многогранной призмы с их оптической осью. Электрические сигналы с датчика угловой скорости и обоих автоколлиматоров направляют в блок 7 обработки, в котором производят интегрирование частоты кольцевого лазера в промежутках времени между моментами фиксации нормали к граням неподвггжной и соответствующих им гранях подвижной многогранных призм. Средняя величина от результата интегрирования характеризует угловое положение контролируемого вала. По разности двух усредненных значений положения вала судят о его угловом повороте. 1 ил. (Л с tsd эо 30 ;&
| Авторское свидетельство СССР № 1130089, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
