15
11283559
Изобретение относится к приборо- , троению, а именно к средствам для иагностики и контроля двигателей нутреннего сгорания.
Цель изобретения - расширение ункциональных возможностей, повыение точности и производительности.
На чертеже приведена электрическая труктурная схема устройства. Устройство содержит датчик 1 авления, датчик 2 угловых положений, атчик 3 опорного положения, управяемый формирователь 4 импульсов, еверсивный счетчик 5, первый делиель 6 частоты, блок 7 масштабирова- ия, первый фильтр 8 нижних частот блок 9 регистрации.
Выход первого делителя 6 частоты соединен с четвертым входом блока 7 масштабирования и с вторым входом управляемого формирователя 4 импульсов, второй управляющий вход которого соединен с входом реверсивного счетчика 5, первый выход - с третьим управляклдим входом блока 7 масштабирования, второй и третий выходы соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика 5.
Выход датчика 1 давления соединен с. входом блока 7 масштабирования, выход которого подключен через первый фильтр 8 нижних частот к входу блока 9 регистрации.
Устройство также содержит первый 10 и второй 11 блоки задержек, блок 12 переменных резисторов, аналого- цифровой преобразователь 13, умножитель 14 частоты, второй делитель 15 частоты, второй фильтр 16 нижних частот, анализатор 17 сигнала и сигнализатор 18.
20
25
вх ро ны уп
5 си пе во Вы кл
О ча ла си
пе эл ло но Вы со вх че вх по то ди па ро вы то
30 вх их к го
35 хо ри др с
40 н м шт о
Выход датчика 3 опорного положения соединен с первым входом первого блока 10 задержки, третий вход которого связан через умножитель 14 частоты с выходом датчика 2 угловых положений и непосредственно - с вторьм входом второго делителя 15 частоты, второй вход которого.связан через аналого-цифровой преобразователь 13 с выходом блока 12 переменных резистров, а выход - с первым входом второго блока 11 задержек и первым входом второго делителя 15 частоты, пер вый вьпсод которого соединен с первым входом управляемого формирователя 4 импульсов, а второй выход - с вторым
входом второго блока 11 задержек, второй и третий выходы которого соединены соответственно с первым и вторым управляющими входами анализатора 17
сигнала, а третий выход - с входом первого делителя частоты 6 и установочным входом реверсивного счетчика. Выход блока 7 масштабирования подключен через второй фильтр 16 нижних
частот к входу анализатора 17 сигнала, выход которого подключен к входу сигнализатора 18.
Анализатор 17 сигнала содержит первый 19, второй 20 и третий 21 элементы памяти, сумматор 22 сигналов, компаратор 23, источник 24 опорного сигнала и элемент 25 задержки. Выходы элементов 19 и 20 соединены соответственно с первым и вторым входами сумматора 22, выход которого через элемент 21 связан с первым входом компаратора 23. Второй вход последнего соединен с выходом источника 24. Выход элемента 25 соединен с вторым, входом элемента 21 памяти. Первые входы первого и второго элементов памяти соединены с выходом второго фильтра нижних частот, а их выходы - с первым и вторым
входами сумматора, при этом вторые их входы подключены соответственно к второму и третьему выходам второго блока задержки.
Датчик 2 формирует на своем выходе за оборот коленчатого вала серию импульсов, равномерно следующих друг за другом через угол if ц 360/i, где i - число импульсов в серии. Датчик 2 может быть выполнен,
например, -в виде индукционного отметчика вращения и металлических штырей, равномерно расположенных по окружности маховика.
Датчик 3 формирует один импульс
за оборот коленчатого вала в момент,, опережающий на некоторый угол Lfg расчетный момент достижения поршнем опорного цилиндра, например, верхней мертвой точки (в.м.т.). Значение (f
выбирается из условия обеспечения возможности совмещения момента появления импульса датчика 3 при его задержке по углу поворота вала с моментом достижения действительного
В-.М.Т. и должно превышать максималь- I но возможное опережение момента действительного в.м.т. относительного расчетного, возникающее вследствие неточности установки датчика, зазоров кривошипно-шатунного механизма и изменения последних в процессе эксплуатации. Датчик 3 может быть выполнен, например, в виде индукционного отметчика вращения, подключенного к его выходу формирователя импульсов и специального штыря, устанавливаемого на окружности маховика, или специального отверстия в маховике.
Управляемый формирователь 4 анализирует код счетчика 5 и изменение сигнала на выходе делителя 6 и формирует на первом выходе импульсы, фронт и срез которых соответствуют моментам изменения знака гармонических составляющих функции хода поршня, воспроизводимой в блоке 7, а также пачки импульсов на втором и третьем выходах, связанных с входами счетчика 5, с частотой импульсов, равной или вдвое меньшей частоты импульсов, поступающих с первого выхода блока 15. Формирователь 4 может быть построен на базе управляемого делителя частоты, выход которого подключен к распределителю импульсов управляемого анализатором кода.
В момент появления кода первого адресе анализатор всякий раз изменяет уровень сигнала на первом выходе формирователя 4. При этом установка исходного уровня этого сигнала производится по фронту и срезу импульса, поступающего на первый вход фор
.«1рователя. Коэффициент деления управляемого делителя, равный двум или единице, устанавливается соответственно по фронту и срезу этого же импульса.
Блок 7 осуществляет масштабирова- ние сигнала датчика 1 путем умножения текущего значения этого сигнала на соответствующее данному угловому положению значение функции хода поршня
М(р) sine Y sin 2(f,
где ty - угловое положение вала;
9 - отношение радиуса кривошипа
к длине шатуна,
1Первый фильтр 8 имеет относительно большую постоянную времени, достаточную для подавления пульсаций частотой, равной частоте циклов работы i двигателя, и может быть вьтолнен на базе нескольких каскадов активньпс фипьтров нижних частот.
5
Q
Второй фильтр 16 характеризуется относительно малой постоянной времени, достаточной для подавления пульсаций частотой, равной частоте 5 дискретизации устройством масштабирования функции хода поршня, и может быть построен на базе одного каскада активного фильтра нижних частот.
Блок 9 может быть выполнен в виде О интегрирующего цифрового.вольтметра.
Первый блок задержки 10 является точной ступенью задержки импульса датчика 3 на угол N kif (где N - код, поступающий на третий вход 5 блока- 10, лд; - угол поворота вала, соответствующий периоду следования импульсов, поступающих на второй вход блока 10). Блок 10 может быть выполнен на базе вычитающего счетчи- 0 ка с целью предустановки кода.
Второй блок 11 задержки содержит три последовательно соединенные грубые ступени задержек импульса датчика 3, выходы которых образуют соответственно первый, второй к третий выходы блока 11. Первый вход первой ступени образует второй вход блока 11. Вторые входы всех ступеней задержек объединены и образуют пер- 0 вый вход блока 11, а на третьи входы ступеней задержек поступают соответственно коды чисел N, , N2 и N.
Конструкция ступеней задержек блока 11 аналогична конструкции блока 10, т.е. первая, вторая и третья ступени задерживают входные импульсы соответственно на угол cf, N, ас,. ,
2 ,
4)3 N3 ЬЦ,. ( йСрт угол поворота вала, соответствующий периоду следования импульсов, поступающих на первый вход блока 11 и, соответственно, на вторые входы ступеней задержек). Число N, является расчетным для контролируемого цилинд- 5 ра, числа Nj и N - постоянными.
Обозначим qip расчетный сдвиг между в.м.т. контролируемого и опорного цилиндров, N целую часть отношения х q, /йср.
Тогда число N, Np - 1, задержка первой ступени tp, Cfr - Л( р , где О г N.-Aq., N2 2, N3 (180/ду.„)- - 1, и задержки второй и третьей ступеней соответственно равны Cfj
2 йЧт и Qj 180° - ДЧ г t:ooT- ветственно импульсы на первом выходе блока 1.1 появляются задержанными относительно появления импульса на первом, входе этого блока на угол.
, tfr - ьсрг ср,, + isq r и
, + 180
Блок 12 содержит набор переменных резисторов, число которых равно, например, числу контролируемых цилиндров обслуживаемого двигателя. Резисторы включены по потенциометрической схеме, при этом их средние точки подключены к входам коммутатора. При включении канала коммутатора, соответствующего номеру контролируемого цилиндра, на выход блока 12 поступает сигнал напряжения , уровень которого определяется углом поворота движка резистора, средняя точка кото рого подключена к выбранному каналу :коммутатора.
Умножитель 14 формирует за период следования входных импульсов число импульсов, равное коэффициенту умножения К. В качестве умножителя 14 может быть использован умножитель число-импульсного типа, построенный на базе генератора опорной частоты, делителя опорной частоты с коэффициентом деления, равным коэффициенту умножения К, и управляемого делителя частоты.
Второй делитель 15 частоты формирует на своих первом.и втором выходах импульсы частотой, меньшей частоты входного сигнала соответственно в N, и Nj целое число раз. Значения Nf и N-2. выбираются исходя из услоВИЯ кратности выходных частот по отношению к частоте следования импульсов, поступающих на второй вход блока 15. При этом значение N выбирается также исходя из условия получения требуемой точности аппроксимации гармонических составляющих функ1щи хода поршня, а значение Nj определяет дискретность задания задержки грубой ступени блока 11. И1.1пульс, поступающий на первый вход блока 15, сбрасывает его счетны узлы в исходное нулевое состояние и тем самым определяет начальную фазу колебаний вькодных импульсов. Блок 15 может быть построен на базе счетчиков с произвольным коэффициентом пересчета.
Сигнализатор 18 может быть построен на базе двух элементов индикации, например на светодиодах, один из которьк подключен к входу сигнализатора через инвертирующий каскад что обеспечивает постоянное свечение одного из светодиодов при поступлени
,
е ,на вход сигнализатора одного из уровней сигнала и чередование свечения светодиодов при чередовании уровней этого сигнала.
5 Элемент 19 памяти представляет собой аналоговое устройство выборки и хранения сигнала.
Элементы 20 и 21 аналогичны по конструкции элементу 19. 0 Сумматор 22 вьшолнен на неинвертирующей схеме сумматора двух сигналов.
Компаратор 23 представляет собой аналоговый компаратор напряжения. Источник 24 представляет собой 5 мультивибратор-автогенератор с симметричным выходным сигналом, скважностью импульсов, равной двум, и час- тотой колебаний порядка единиц герц. К выходу мультивибратора подключен 20 делитель, с помощью которого устанавливается требуемый уровень сигнала.
Элемент 25 задержки формирует им- ,пульс, задержанный относительно входного на постоянный интервал времени, достаточный для установления сигнала на выходе сумматора 22. Элемент 25 может быть выполнен в виде двух последовательно соединенных ждущих мультивибраторов.
Элемент 25 срабатывает при поступлении на его вход импульса запуска, если на управляющий вход первого ждущего мультивибратора подан управляющий сигнал соответствующего уровня. 35 Принцип действия устройства следующий .
Уравнение для измерения среднего индикаторного давления можно предста- вить в виде
Г
Р; -г P(q))sin CfdiCf IT
+ I V((f) I sin2q cf
В течение одного цикла работы двигателя в устройстве осуществляется масштабирование текушдх значе50 НИИ функции давления P(qi) путем умножения тих значений на соответствующие значения sin (р - первой гармонической составляющей функции хода поршня - и интегрирование этих
J5 результатов. В течение другого цикла работы масштабирование осуществляется путем умножения текущих значений функции Р(ч) на соответствующие значения sin 2 Ц) - второй гармонической
7
составляющей функции хода пор и значение постоянного для да типа двигателя коэффициента А последующими интегрированием нием с результатом, полученны первом цикле. Таким образом, ление значения Р- осуществляе два цикла работы двигателя.
Интегрирование и суммировазультатов масштабирования осу
ляются с помощью медленного сумматора - фильтра нижних частот с относительно большой постоянной времени, обеспечивающего подавление пульсаций выходного сигнала устройства масшта- бирования частотой, равной частоте циклов. При этом результат измерения соответствует истинному, если сигнал начала цикла, формируемый устройством и определяющий начало ьоспроиз- ведения гармонической составляющей функции хода поршня, совпадает с нижней мертвой точкой (н.м.т.) поршня контролируемого цилиндра. Формирование этого сигнала осуществляется пу- тем регулировки фазового сдвига сигнала датчика 3 при отключенной подаче топлива в контролируемый цилинд Задание фазового сдвига осуществляется двумя дискретными ступенями задержек импульса датчика 3 - грубой, значение сдвига которой задается равным расчетному сдвигу между в.м.т. опорного и н.м.т. контролируемого цилиндров с точностью до единицы дискретности задержки и не регулируется, и точной, значение которой регулируется. Диапазон регулировки точной ступени равен двум
Датчик 1 устанавливается в инд каторный канал контролируемого ци линдра. При работе двигателя мгно венное значение давления газов в контролируемом хщлиндре преобразу
единицам дискретности грубой ступе-40 ся датчиком 1 в пропорциональный
ни и учитывает возможные неточности установки датчика 3, зазоров в кри- вошипно-шатунном механизме и их изменение в процессе эксплуатации, а также некратность значения суммарног го сдвига единице дискретности гру- бой ступени. Обработка результатов масштабирования при регулировке фазового сдвига осуществляется с поИмпульсы, формируемые датчиком 2 с периодом следования, соответствующим повороту вала на угол лц , песмощью быстрого сумматора - фильтра 50 тупают на вход умножителя t4. На вынйжних частот с малой достоянной.времени, достаточной для подавления пульсацийвыходного сигнала устройства масштабирования частотой, равной частоте дискретизации функции хода поршня. При этом сигнал на выходе быстрого сумматора изменяет полярность в диапазоне угловых положений вала, близких к в.м.т. поршня конт8
ролируемого цилиндра, в соответствии с законом изменения знака гармонических составляющих функции хода поршня. Наибольшая крутизна изменения полярности сигнала соответствует циклу воспроизведения первой гармонической составляющей функции хода поршня. При совпадении момента появления сигнала начала цикла с моментов достижения н.м.т. поршня момент изменения знака гармонических составляющих совпадает с моментом достижения в.м.т. поршня, и сигнал на выходе быстрого сумматора становится симметричным относительно момента изменения полярности. Устройство фиксирует этот момент, анализируя результат суммирования уровней сигнала быстрого сумматора в моменты, опе- режаюш}1е и запаздывающие относительно середины цикла воспроизведения первой гармонической составляющей на некоторый угол uif , равньй единице дискретности задания задержки. грубой ступени формирования фазо- вого сдвига. Таким образом, контроль результатов регулировки фазового сдвига осуществляется один раз за два цикла работы двигателя, что позволяет ускорить процесс регулировки и значительно снизить ошибки оператора вследствие перерегулировки..
Устройство работает следующим образом.
Датчик 1 устанавливается в индикаторный канал контролируемого цилиндра. При работе двигателя мгновенное значение давления газов в контролируемом хщлиндре преобразуется датчиком 1 в пропорциональный
электрический сигндл. Этот сигнал поступает в блок 7, где осуществляется его масштабирование. Сигнал с. выхода блока 7 через фильтры 8 н 16 поступает на входы соответственно блока 9 и анализатора 17.
Импульсы, формируемые датчиком 2 с периодом следования, соответствующим повороту вала на угол лц , пеступают на вход умножителя t4. На выходе последнего формируются импульсы с периодом следования, соответствующим повороту вала на угол йср tfy/K. Импульсы с выхода умножи е- ля 14 поступают на третий вход элемента 10. Значение определяет . единицу дискретности задания задержки элементом 10. Одновременно импульсы с выхода умножителя 14 поступают
на второй вход блока 15. На первом и втором выходах блока 15 образуются импульсы с периодами следования, соответствующими углам поворота вала
, и UQ iCfT Nj.
Импульсы с первого выхода блока 15 поступают на вход управляемого фомирователя 4, При этом значения определяют единицу дискретности задания гармонических составляющих функции хода поршня. Импульсы с второго выхода блока 15 поступают на второй вход блока 11. При этом значение йс определяет единицу дискретности задания задержек блока 11.
Перед началом измерения подача топлива в контролируемый цилиндр отключается, а на управляющие входы блоков 12 и 11 подаются соответствующие управляющие сигналы.
При этом на выход блока 12 со средней точки переменного резистора, Соответствующего номеру контролируемого цилиндра, поступает сигнал
напряжения Up. Уровень этого сигнала определяется углом поворота движ- ка переменного резистора. Напряжение и преобразуется преобразователем 13 в код числа N-p, поступающий на второй вход элемента 10 и определяющий значение задержки этого элемента, равное повороту вала на угол
tPr ЬЧ-т
На управляющий вход блока 11 подается код числа К,J являющегося расчетньп для контролируемого цилиндра и определяющим задержку первой ступени блока 11 ср, tf - ti(J/. Со- . ответственно, значения задержек моментов появления импульсов на первом и втором выходах блока 1,1 принимают значения tp,, q + uCfr i tpj. + 180°. - .. .. . .
Пусть на выходе датчика 3 формиру- ется икртульс, опережающий на угол с поворота вала момент достижения в.м.т, поршнем опорного цилиндра. Этот импульс поступает на первый вход элемента 10, Последний срабатывает и формирует на вькоде импульс, задерл анный относительно входного на угол cf . Импульс с выхода элемента 10 поступает на первый вход блока 15 и сбрасывает в исходное нулевое состояние его счетные элементы, задавая тем самым начальную фазу колебаний выходных импульсов блока 15, Одновременно этот же импульс поступает на первый вход блока 11. Последний
5
0
5
срабатывает и формирует на втором и третьем выходах импульсы соответственно опережающие и запаздывающие относительно середины цикла на угол
АЦ г первом выходе - сигнал начала цикла.
Сигнал начала цикла, образующийся на первом выходе блока 11, поступает на вход делителя 6 и установочный вход счетчика 5, определяя начало воспроизведения гармонических состав- ляющих функции хода поршня в блоке 7. Делитель 6 осуществляет деление на два частоты импульсов сигнала начала цикла. Скважность импульсов равна двум. При этом при формировании импульса на выходе делителя 6 в блоке 7 воспроизводится первая гармоническая составляющая (sinff) , а при формировании паузы - вторая гармоническая составляющая (sin 2(f) .
Сигналы опережения и запаздывания относительно середины цикла, образующиеся на первом и втором выходах блока 11, поступают соответственно на первый и второй управляющие входы анализатора 17, на третий управлякнций вход которого поступает сигнал с выхода первого делителя 6 частоты Ана0 лизатор 17 фиксирует в моменты поступления сигналов опережения и запаздывания соответственно отрицательный и положительный уровни сигнала, образующегося на выходе фильтра 16, сум5 мирует эти уровни, фиксирует результат суммирования при наличии импульса на выходе делителя 6 и формирует логические сигналы, О или последовательность импульсов, если резуль0 тат суммирования соответственно больше, меньше или равен нулевому. Сигнализатор 18 формирует соответственно сигналы Опережение, Запаздывание или Синфазность. При этом появле5 ние сигналов Опережение и Запаздывание означает, что нулевая фаза воспроизведения первой гармонической составляющей функции хода поршня в блоке 7 соответственно опережает и запаздывает относительно действительного момента достижения в.м.т. поршнем контролируемого цилиндра. Вращая движок переменного резистора, оператор при получении сигнала Опережение увеличивает значение задержки 0 элемента 10 и, соответственно, уменьшает это значение при получении сигнала Запаздывание, добиваясь получения сигнала Синфазность. Появ0
5
ленне последнего означает, что мо- , мент появления сигнала начала цикла на первом выходе блока 11 совпадает с моментом достижения н.м.т. поршня контролируемого цилиндра, а моменты появления сигналов опережения и запаздьшания на втором и третьем выходах блока 11 соответственно опережают и запаздывают на один и тот же угол относительно момента достижения в.м.т. контролируемого цилиндра. На этом процесс регулировки фазового сдвига заканчивается, подача топлива в контролируемый цилиндр
включается, и производится измерение 5 рования происходит в обратном поряд- среднего индикаторного давления. ке.
Измерение производится следующим образом.
Коэффициенты масштабирования в блоке 7 изменяются дискретно по углу пово- ,рота вала.Значение каждого из коэффициентов соответствует значению синуса угла поворота, выбранному на участке угла между моментами смены
20
После возвращения счетчика 5 в исходное состояние процесс масштабирования до окончания импульса на выходе делителя 6 повторяется еще раз аналогичным образом. Следовательно, в течение первого рабочего цикла, равного длительности импульса на выходе делителя 6, в блоке 7 проискоэффициента масштабирования. Значе- ходит умножение мгновенных значений ния коэффициентов лежат в диапазоне Функции давления на модуль соответ- угла 0-90 . Смена коэффициентов масштабирования в блоке 7 осуществляется по сигналам с кодового выхода датчика 5.30
При появлении на третьем выходе блока 11 сигнала начала цикла счет- . чик 5 устанавливается в исходное cocTOHHiie. По сигналу на его выходе, соответствующему исходному состоянию, 35 счетчика 5 из формирователя 4 попере- 3 блоке 7 начинается умножение теку- менно поступают импульсы частотой, щих значений сигнала датчика 1 на первый (наименьший) коэффициент, хранящийся в ПЗУ блока 7. Одновременно сигнал исходного состояния счетчика 5 поступает на второй управляющий вход формирователя 4, в резульствующих значений функции синуса угла поворота коленчатого вала.
Г
с момента окончания импульса на втором входе формирователя 4 и до момента появления следующего импульса, т.е. в течение второго рабочего цикла, на входы суммирования и вычитания
равной частоте импульсов на первом выходе блока 15, т.е. частотой, в два раза большей частоты импульсов в
40 предьщущем цикле. В результате процесс умножения в блоке 7 в течение второго рабочего цикла повторяется четыре раза, т.е. происходит умножение мгновенных значений функции давтате оказывается разблокированным второй ВЫХОД последнего, связанный с суммирующим входом счетчика 5.
На второй управляющий вход формирователя поступает сигнал с выхода делителя 6, осуществляющего деление на два частоты сигнала начала цикла со скважностью импульсов, равной двум.
Пусть в момент появления на выходе блока 11 очередного сигнала начала цикла, устанавливающего счетчик 5 в исходное состояние, на выход делителя 6 также начинает форгдаро- ваться импульс. Этот импульс поступает на управляющий вход формировате
ля 4 и обеспечивает прохождение на суммирующий вход счетчика 5 импульсов с частотой, в два раза меньшей, чем частота импульсов на первом выходе блока 15.
По сигналу конечного состояния счетчика 5, соответствующему включению последнего (наибольшего) коэффициента в блоке 7, блокируется третий выход и открывается четвертый выход формирователя 4.
В результате зтого счетчик 5 начинает работать в режиме вычитания, и включение коэффициентов масштаби20
ходит умножение мгновенных значений Функции давления на модуль соответ-
счетчика 5 из формирователя 4 попере- менно поступают импульсы частотой,
ствующих значений функции синуса угла поворота коленчатого вала.
Г
с момента окончания импульса на втором входе формирователя 4 и до момента появления следующего импульса, т.е. в течение второго рабочего цикла, на входы суммирования и вычитания
счетчика 5 из формирователя 4 попере- менно поступают импульсы частотой,
равной частоте импульсов на первом выходе блока 15, т.е. частотой, в два раза большей частоты импульсов в
предьщущем цикле. В результате процесс умножения в блоке 7 в течение второго рабочего цикла повторяется четыре раза, т.е. происходит умножение мгновенных значений функции давления на модуль соответствующих значений функхщи синуса двойного угла с точностью до постоянного мнЬжителя /2, сигнал задания которого поступает на соответствующий вход блока 7.
Одновременно с описанными выше процессами умножения в блоке 7 осуществляется изменение полярности результатов умножения в моменты изменения логического сигнала на его четвертом
входе. Значение этого сигнала, поступающего с первого выхода формирователя А, соответствует знаку значений ункции синуса, воспроизводимой в блоке 7, и изменяется в моменты изменения направления счета счетчика 5 с обратного на прямое.
Начальная установка сигнала на первом вькоде формирователя 4, соответствующая отрицательным значениям синуса, производится по фронту или срезу импульса на втором входе. Двух полярный отмасштабированный сигнал поступает на выход блока 7.
Сигнал с выхода блока 7 поступает на вход фильтра 8, с помощью которог осуществляется выделение постоянной составляницей, т.е. интегрирование входного сигнала. Постоянное напряжение с выхода фильтра 8 поступает на вход блока 9, в котором с помощью измерителя постоянного напряжения фиксируется значение среднего инди- ;каторного давления.
Анализатор 17 работает следующим образом.
Разнополярный сигнал с выхода фильтра 16 поступает на первые входы элементов 19 и 20 памяти. В момент поступления сигнала с второго выхо- да блока 11 на второй вход элемента 19 на выходе последнего фиксируется отрицательный уровень напряжения. Соответственно, в момент поступления сигнала с третьего выхода блока 11 на второй вход элемента 20 на выходе последнего фиксируется положительный уровень напряжения. Сигналы с выходов элементов 19 и 20 суммируются сумматором 22, и результирую- щий сигнал поступает на вход элемента 21. Сигнал с второго выхода блока 11 одновременно поступает на второй . вход элемента 25. Последний срабатывает, если на его первый вход с выхода делителя 6 поступает импульс, и формирует импульс, задержанный на фиксированный интервал времени, достаточный для установления выходного сигнала сумматора 22. Импульс с выхода элемента 25 поступает на управляющий вход элемента 21, и на выходе последнего фиксируется результирующий сигнал, поступающий с выхода сумматора 22. Сигнал с выхода элемента 21 поступает на первый вход компаратора 23, на другой вход которого с выхода источника 24 поступает опорный сигнал - биполярное напряжение частотой порядка еди- ниц герц и скважностью, равной двум. Амплитуда диполярного сигнала превышает порог чувс гвительности компаратора 23, но находится в зоне
единицы дискретности отсчета индикатора блока 9. Если уровень сигнала на первом входе компаратора 23 близок к нулевому, то на его выходе формируются импульсы частотой и скважностью, равными частоте и скважности сигнала источника 24. Импульсы с выхода компаратора 23 поступают на вход сигнализатора 18 и вызывают чередование свечения обоих его элементов индикации, воспринимаемое оператором как наличие сигнала Син- фазность. Превышение уровнем сигнала на первом входе компаратора 23 сигнала источника 24 вызывает, соответственно, появление на выходе компаратора сигнала с уровнем 1 или О, что в свою очередь вызывает в сигнализаторе 18 свечение соответственно элемента индикации сигнала Опережение или элемента индикации сигнала Запаздывание.
После окончания регулировки фазового сдвига сигнализатор 18 может быть отключен.
Формула изобретения
1.Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания, содержащее датчик давления, датчик угловых положений, датчик опорного положения, управляющий формирователь имульсов, реверсивный счетчик, первый делитель частоты, последовательно включенные блок масштабирования с четьфьмя входами, первый фильтр нижних частот, и блок регистрации, при этом датчик давления п-одключен к входу блока масштабирования, отличающее с я тем, что, с целью раснирения функциональных возможностей, повьпие- ния точности и производительности, в него введены первый и второй блоки задержек, блок переменных резисторов аналого-дафровой преобразователь, умножитель частоты, второй делитель частоты, второй фильтр нижних частот, анализатор сигнала с четырьмя входами и сигнализатор, при этом датчик опорного положения подключен к первому входу первого блока задержки, к второму входу которого подключены последовательно соединенные блок переменных резисторов и аналого-цифровой преобразователь, к третьему - последовательно соединенные датчик угловых положений и умножител
15
частоты, а выход - к первому входу второго блока задержки и первому входу второго делителя частоты, выход которого соединен со вторым входом второго блока задержек, а второй выход - с первым входом управляемого формирователя импульсов, первый выхо второго блока задержек соединен с первым входом реверсивного счетчика и с входом первого делителя частоты, а второй и третий его выходы - соответственно с первым и вторым входами анализатора сигнала, выход первого делителя частоты соединен с вторым входом управляемого формирователя импульсов, четвертым входом блока масштабирования и с третьим входом анализатора сигнала, выход блока масштабирования подключен через второй фильтр нижних частот к четвертому входу анализатора сигнала, выход которого подключен к сигнализатору .
2. Устройство по п. 1, о т л ичающеес я тем, что в нем анаРедактор Л.Веселовская Заказ 7427/37
Сдставитель А.Зосимов
Техред Л.Сердюкова Корректор С.Шекмар
Тираж 776 .Подписное
ВНИИПИ Государственного комитета СССР
по дедам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
28355916
лизатор сигнала содержит первый, второй.и третий Элементы памяти, сумматор сигналов, элемент задержки, источник опорного сигнала и компара5 тор, при этом первые входы первого и второго элементов памяти соединены с выходом второго фильтра нижних частот, а их выходы соединены с первым и вторым входами сумматЬра,
10 выход которого соединен через последовательно включенные третий элемент памяти и компаратор с входом сигнализатора, причем второй вход третьего элемента памяти соединен с
5 выходом элемента задержки, первый вход которой соединен с выходом первого делителя частоты, второй вход - с вторым выходом второго блока задержек, при этой источник
20 опорного сигнала подключен к компаратору, а второй вход первого элемента памяти подключен к второму выходу второго блока задержек, к третьему выходу которого подключен второй
25
вход второго элемента памяти.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров двигателя внутреннего сгорания | 1983 |
|
SU1138684A1 |
| Отметчик верхней мертвой точки поршня двигателя внутреннего сгорания | 1982 |
|
SU1076791A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2368909C1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕННОГО ТОКА ПРОМЫШЛЕННОЙ ЧАСТОТЫ | 2008 |
|
RU2368910C1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1999 |
|
RU2173030C2 |
| Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания | 1981 |
|
SU979926A1 |
| СИСТЕМА ЦИФРОВОГО ТЕЛЕВИДЕНИЯ | 2001 |
|
RU2208917C2 |
| Способ прогнозирования прорывов металла на машине непрерывного литья заготовок и устройство для его осуществления | 1988 |
|
SU1502179A1 |
Изобретение относится к приборостроению и позволяет расширить функциональные возможности, повысить точность и производительность. Раз- нополярный сигнал с выхода фильтра 16 поступает на входы элементов 19 .и 20 памяти. В момент поступления сигнала с выхода блока 11 задержки на вход элемента 19 памяти на выходе последнего фиксируется отрицательный уровнь напряжения и соответственно на выходе элемента 20 памяти - положительньй уровень напряжения . Полученные сигналы суммируют- ся сумматором 22, и результат поступает на вход элемента 21 памяти. Импульс с элемента 25 задержки поступает на вход элемента 21 памяти, на выходе последнего фиксируется результирующий сигнал, поступающий с выхода сумматора 22. Сигнал с выхода элемента 21 памяти поступает на вход компаратора 23, на другой вход которого с выхода источника 24 поступает опорный сигнал. Импульсы с выхода компаратора 23 поступают на вход сигнализатора 18. 1 з.п. ф-лы, 1 ил. (Л ю эо 00 ел ел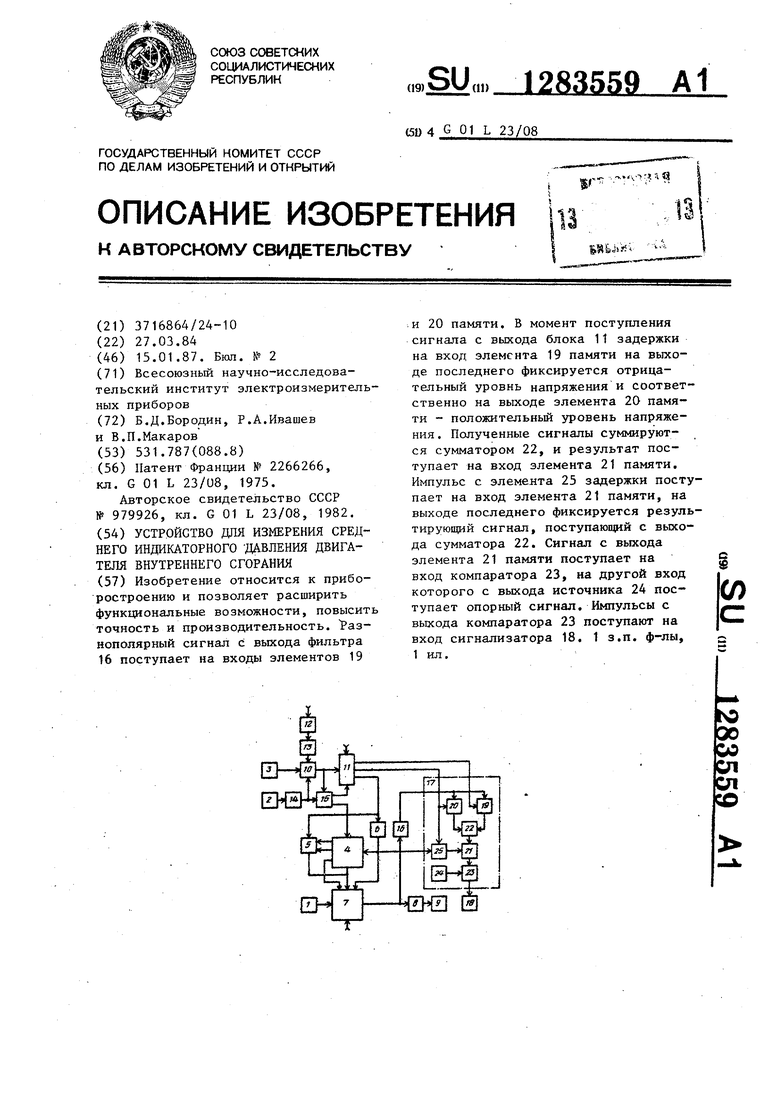
| СОДЕРЖАЩИЕ ЦЕМЕНТ КОМПОЗИЦИИ И СПОСОБ ИХ ПРИМЕНЕНИЯ | 2001 |
|
RU2266266C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания | 1981 |
|
SU979926A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
