Изобретение относится к усилительым устройствам с широтно-импульсным реобразованием сигнала и может быть спользовано в аналоговых вычислитеьных машинах.
Цель изобретения - повышение наежности работы и помехозащищенности.
На фиг.1 представлена функциональая схема развертывающего преобразоателя; на фиг.2-5 - временные диаг- 10 аммы сигналов.
На фиг.1 обозначены первый сумматор 1, третий сумматор 2, второй суматор 3, основной интегратор 4, группа дополнительных интеграторов 5, 5 5j , .,. 5 5 , группа релейных элементов 6 , 6 , .. . ,. бг,, вход 7 и выход 8.
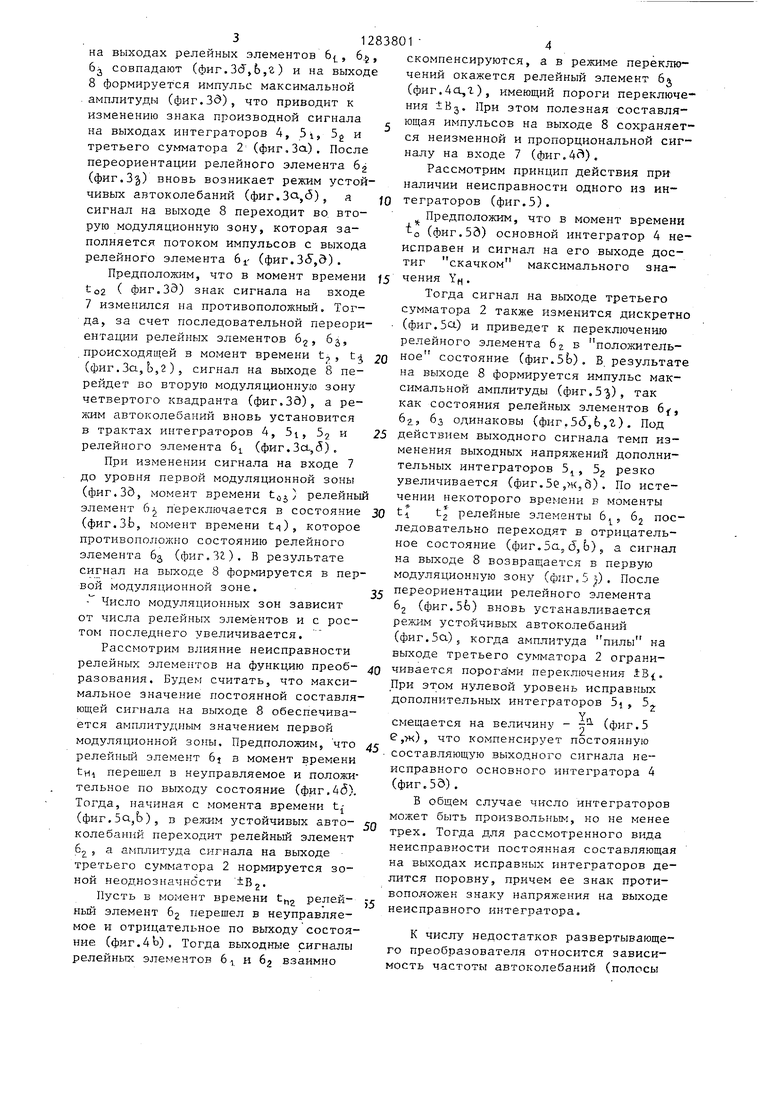
На фиг.2-5 обозначены x(t) - сигнал на входе 7; .), ). ui (t выходные сигналы основного 20 интегратора 4 и дополнительных интеграторов 51, Ypi (t) , Yp2(t), Ypj(t) - выходные сигналы релейных элементов б, 63, 63 ьп (t) - сигнал на выходе 8.
Релейные элементы б , .. ., 6„ имеют неинвертирующую петлю гистерезиса и симметричные относительно нулевого уровня пороги переключения 5:В(, где ,2,...,п.30
Положим, что 1BJ lB2l.. . . Выходной сигнал релейных элементов 6i, ..., бг, меняется дискретно в пределах ±А/п. При рассмотрении принципа действия положим, что . а 35 коэффициент передачи входного сигнала равен 1„
Развертывающий преобразователь работает следующим образом,
40
Предположим, что в начальный момент времени релейные элементы 6i, 6, 6j находятся в состоянии А/п А/3 (фиг.2сГ,,Ь ,г). При этом на выходе 8 формируется импульс А (фиг.2), 45 под действием которого сигналы на выходах основного и дополнительных интеграторов 4, 5, 52 изменяются в отрицательном направлении (фиг.2Э,, 6 ,) . Сигнал на выходе третьего сум- 50 матора 2 (фиг.2а) представляет собой сумму сигналов, действующих на его входах (фиг, 2Э,е ,«), и предназначен для управления моментами переключения релейных элементов б, 6, 63. 55 В момент времени tj релейный э ремент 6, имеющий пороги переключения iB-t ,, переключается в состояние - А/3 (фиг.2а.,15) j что влечет за собой уменьшение амплитуды сигнала на выходе 8 (фиг.2) и снижение скорости изменения разверток на выходах основного и дополнительных интеграторов 4, 5, 5 (фиг. 2о., Э,, е ,н). В момент времени t J, релейный элемент Gg переходит в отрицательное состояние (фиг.2Ь), и выходные сигналы релейных элементов 6- и 6з взаимно компенсируются (фиг.2Ь,2.), На этом ориентация релей |Ных элементов заканчивается и устанавливается режим устойчивых автоколебаний. После изменения зн.ак.а сигнала на выходе релейного элемента 62 (фиг,2Ь) амплитуда сигнала на выходе .8 имеет отрицательный знак (фиг.2) и развертки интеграторов 4, 5i, 5г (фиг.2с1,Э ,0 ,ж) нарастают в положительном направлении до момента переключения релейного элемента б. и изменения знака сигнала на выходе 8 .(фиг,2 5,). В дальнейшем процесс периодически повторяется, интеграторы 4, 5z и релейный элемент 6 работают в режиме устойчивых автоколебаний, релейные элементы 6, 63 находятся в противоположных по состояниях а на выходе 8 формируется сигнал типа меандр со средним нулевым значением,
Предпололсим, что в момент времени tg (фиг.2) сигнал на выходе 8 изменился скачком до уровня x(t)-,
тогда в один из полупериодов автоколебаний темп изменения сигналов на выходах интеграторов 4, , 5 определяется разностью воздействий на входах первого суг-1матора 1 (фиг,2, д .,Q у гн.} у а в примыкающем полупериоде - суммой этих воздействий. В результате на выходе 8 среднее значение сигнала пропорционально величине сигнала на входе 7.
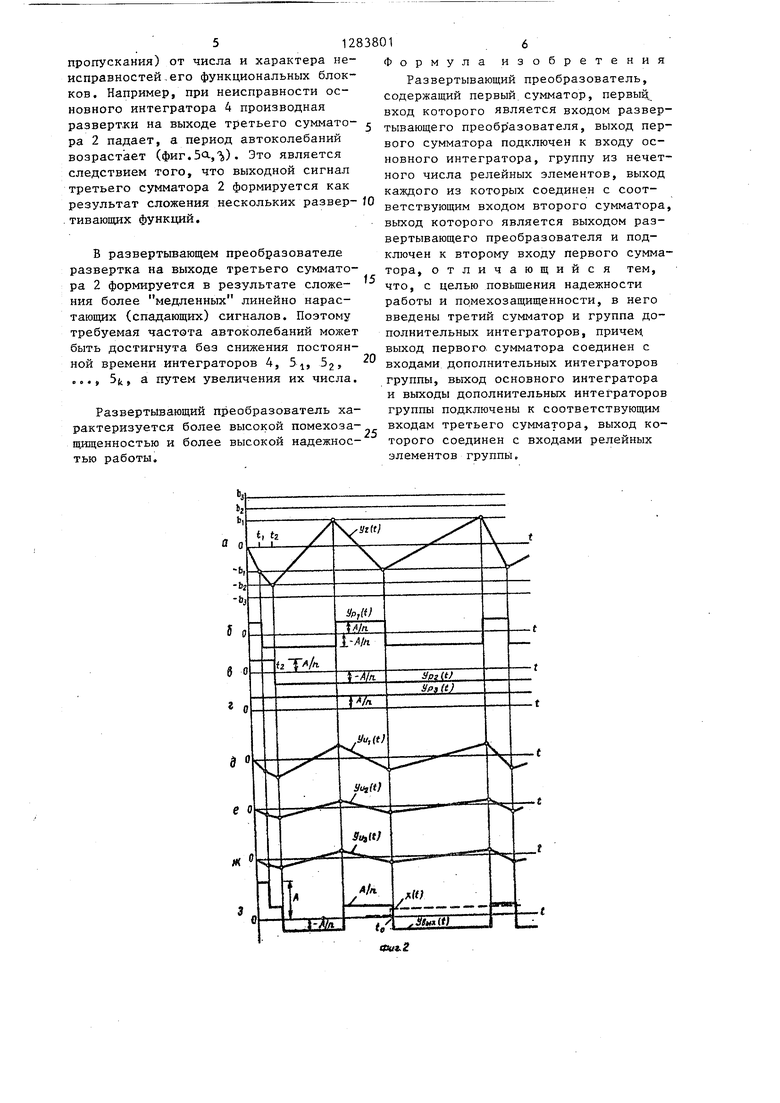
Рассмотрим режим формирования многозонного частотно-широтно-импульсно- го сигнала (фиг.З).
Предположим, что в момент времени (фиг,3d) сигнал на входе 7-изменился до величины TK|x(t). Учитывая, что результирующий сигнал на выходе первого сумматора 1 оказался отрицательным, развертка Yj.(t) нарастает в положительном направлении до момента времени t, когда релейный элемент 6 переключается в состояние
(фиг.3ct,,fe) , При этом знаки сигналов
на выходах релейных элементов 6, 6. бд совпадают (фиг. 36,Ь,и ) и на выход 8 формируется импульс максимальной амплитуды (фиг.3d), что приводит к изменению знака производной сигнала на выходах интеграторов 4, 5i, 5g и третьего сумматора 2 (фиг,За). После переориентации релейного элемента 6 (фиг.З ) вновь возникает режим устойчивых автоколебаний (фиг.ЗС1,б), я сигнал на выходе 8 переходит во. вторую модуляционную зону, которая заполняется потоком импульсов с выхода релейного элемента (фиг,3(5,д).
Предполола м, что в момент времени to2 ( Фиг.ЗЭ) знак сигнала на входе 7 изменился на противоположный. Тогда, за счет последовательной переори- ентащ-1И релейных элементов 6, 65, происходящей в момент времени t, , t. (фиг.За,Ь,2), сигнал на выходе 8 перейдет во вторую модуляционную зону четвертого квадранта (фиг.3d), а ре- яшм автоколебаний вновь установится в трактах интеграторов 4, 5i, Sg и релейного элемента 6 (фиг,3а,5).
При изменении сигнала на входе 7 до уровня первой модуляционной зоны (фиг,35, момент времени ) релейный
элемент 6 переключается в состояние 30 i 2 релейные элементы б (фиг.ЗЬ, момент времени ), которое противоположно состоянию релейного элемента б (фиг.31). В результате сигнал на выходе 8 формируется в перледовательно переходят в отр ное состояние (фиг.За, (5, Ь) 5 на выходе 8 возвращается в п модуляционную зону (фиг,5р переориентации релейного эле 6 (фиг.) вновь устанавлив режим устойчивых автоколебан (фиг.За), когда амплитуда п выходе третьего cyNjMaTopa 2 чивается порога ми переключен При этом нулевой уровень исп дополнительных интеграторов
вой модуляционной зоне.
- Число модуляционных зон зависит от числа релейных элементов и с ростом последнего увеличивается.
Рассмотрим влияние неисправности релейных элементов на функцию преоб- разования. Будем считать, что максимальное значение постоянной составляющей сигнала на выходе 8 обеспечивается амплитуднь1м значением первой модуляционной зоны. Предположим, что релейный элемент 6t в момент времени tni перешел в неуправляемое и положительное по выходу состояние (фиг.45), Тогда, начиная с момента времени (фиг.5а,Ь), в релшм устойчивых авто
колебаний переходит релейный элемент 6 , а амплитуда сигнала на выходе третьего сум атора 2 нормируется зоной неоднозначности iBg.
Пусть в момент времени tf, релейный элемент 63 перешел в неуправляемое и отрицательное по выходу состояние (фиг.4Ь), Тогда выходные сигнатш релейных элементов б и 63 взаимно
скомпенсируются, а в режиме переключений окажется релейный элемент б (фиг.4(1,1), имеющий пороги переключения -Bj. При этом полезная составляющая импульсов на выходе 8 сохраняется неизменной и пропорциональной сигналу на входе 7 (фиг,4).
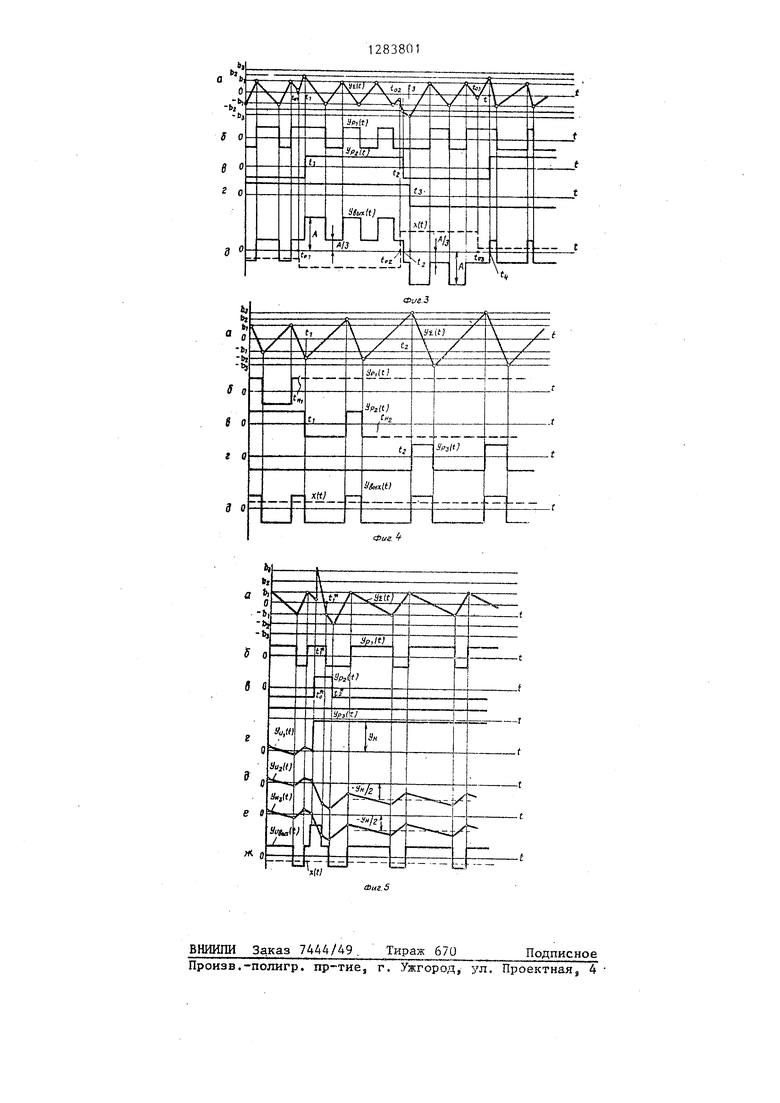
Рассмотрим принцип действия при наличии неисправности одного из интеграторов (фиг.5).
Предположим, что в момент времени LO (фиг.ЗЭ) основной интегратор 4 неисправен и сигнал на его выходе достиг скачком максимального значения YH .
Тогда сигнал на выходе третьего сумматора 2 также изменится дискретно (фиг.5с1) и приведет к переключению релейного элемента 6г в положительное состояние (фиг.ЗЬ). В, результате на выходе 8 формируется импульс максимальной амплитуды (фиг,5), так как состояния релейных элементов , б2, бз одинаковы (фиг.,Ь,г). Под действием выходного сигнала темп изменения выходных напряжений дополнительных интеграторов 5, 5 резко увеличивается (фиг. 5е , б). По истечении некоторого времени в моменты
1
пос0 i 2 релейные элементы б
д
0
5
ледовательно переходят в отрицательное состояние (фиг.За, (5, Ь) 5 а сигнал на выходе 8 возвращается в первую модуляционную зону (фиг,5р. После переориентации релейного элемента 6 (фиг.) вновь устанавливается режим устойчивых автоколебаний (фиг.За), когда амплитуда пилы на выходе третьего cyNjMaTopa 2 ограничивается порога ми переключения tE, При этом нулевой уровень исправных дополнительных интеграторов 5 , 5,
Y смещается на величину - г (фиг.5
в ,н), что компенсирует постоянную составляющую выходного сигнала неисправного основного интегратора 4 (фиг.ЗЭ).
Б общем случае число интеграторов может быть произвольныьг, но не менее трех. Тогда для рассмотренного вида неисправности постоянная составляющая на выходах исправных интеграторов делится поровну, причем ее знак противоположен знаку напряжения на выходе неисправного интегратора,
К числу недостатков развертывающего преобразователя относится зависимость частоты автоколебаний (полосы
пропускания) от числа и характера неисправностей .его функциональных блок- ков. Например, при неисправности основного интегратора 4 производная развертки на выходе третьего суммато- ра 2 падает, а период автоколебаний возрастает (фиг.ЗО-,-). Это является следствием того, что выходной сигнал третьего сумматора 2 формируется как результат сложения нескольких развер- .тивающих функций.
В развертывающем преобразователе развертка на выходе третьего сумматора 2 формируется в результате сложе- ния более медленных линейно нарастающих (спадающих) сигналов. Поэтому требуемая частота автоколебаний может быть достигнута без снижения постоянной времени интеграторов 4, 5-, 5
2
5fc, а путем увеличения их числа.
Развертывающий преобразователь характеризуется более высокой помехозащищенностью и тьго работы.
более высокой надежнос
Ьг ь,
о
-ь, -Ьг -bj
О
t, ti
/
iTVft
tfzW
HpjiO
t
L-AIn
t-X//t
1
335
с
0
5
Формула изобретения
Развертывающий преобразователь, содержащий первый, сумматор, первый, вход которого является входом развертывающего преобр азователя, выход первого сумматора подключен к входу основного интегратора, группу из нечетного числа релейных элементов, выход каждого из которых соединен с соответствующим входом второго сумматора, выход которого является выходом развертывающего преобразователя и подключен к второму входу первого сумматора, отличающийся тем, что, с целью повышения надежности работы и помехозащищенности, в него введены третий сумматор и группа дополнительных интеграторов, причец выход первого сумматора соединен с входами дополнительных интеграторов группы, выход основного интегратора и выходы дополнительных интеграторов группы подключены к соответствующим входам третьего сумматора, выход которого соединен с входами релейных элементов группы.
tfzW
ypf(t) ypi(t)
A/n
fif)
tg if
8 о
г о
ВНИИПИ Заказ 7444/49. Тираж 670
Произв.-полигр. np-THej г. Ужгород, ул. Проектная, 4
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Многозонный развертывающий преобразователь | 1987 |
|
SU1418765A1 |
| Развертывающий операционный усилитель | 1985 |
|
SU1260975A1 |
| Развертывающий преобразователь | 1986 |
|
SU1372336A1 |
| Многозонный развертывающий преобразователь | 1987 |
|
SU1471203A1 |
| Развертывающий усилитель | 1987 |
|
SU1495821A2 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С АВТОМАТИЧЕСКИМ РЕЗЕРВИРОВАНИЕМ КАНАЛОВ РЕГУЛИРОВАНИЯ | 2011 |
|
RU2470360C1 |
| Развертывающий усилитель | 1988 |
|
SU1508245A2 |
| ОДНОТАКТНЫЙ МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2549128C1 |
| Развертывающий преобразователь | 1984 |
|
SU1280399A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
Изобретение относится к усилительным устройствам с широтно-импуль- сным преобразованием сигнала и может быть использовано в аналоговых вычислительных машинах. Целью изобретения .является повьшение надежности работы и помехозащищенности. Развертывающий преобразователь содержит сумматоры 1, 2, 3, группу из нечетного числа релейных элементов, группу дополнительных интеграторов, основной интегратор 4. В преобразователе развертка на выходе третьего сумматора 2 формируется в результате сложения более медленных линейно нарастающих (спадающих) сигналов. Поэтому требуемая частота автоколебаний может быть достигнута без снижения постоянной времени интеграторов 4, 5(-5к, а путем увеличения их числа, 5 ил. фиг. 1
| Автогенераторный усилитель | 1978 |
|
SU698004A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Развертывающий усилитель | 1984 |
|
SU1183988A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
