Изобретение относится к автоматике и вычислительной технике, а именно к полуавтоматическим устройствам считывания координат элементов изображения с документов, принцип деист- ВИЯ которых основан на измерении времени распространения ультразвуковой волны в различных средах, и может быть использовано для преобразования сложной графической информации в цифровую форму с пocлeдyюup м вводом ее в ЭВМ.
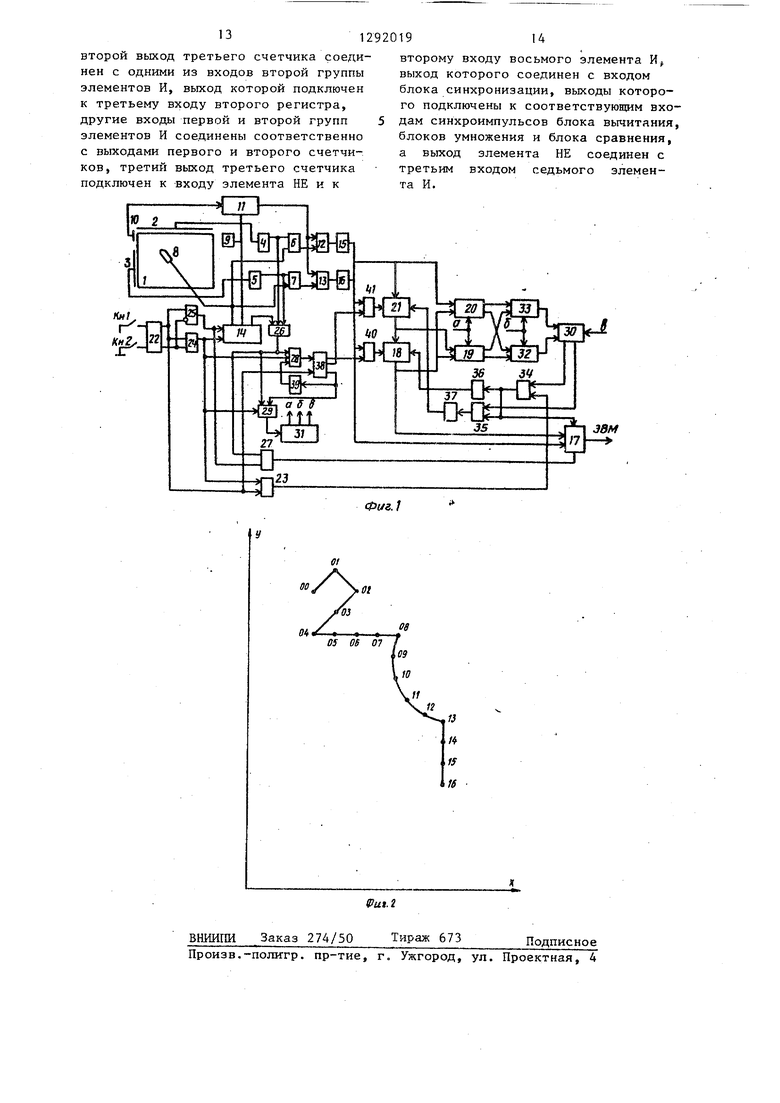
Цель изобретения - упрощение устройства.На фиг. 1 приведена функциональная схема устройства для считывания графической информации; на фиг, 2 - кривая для пояснения работы устрой- |ства.
Устройство для считывания графической информации содержит планшет 1, на взаимно перпендикулярных сторонах которого установлены линейные координатные микрофоны 2 и 3, подключенные к блокам 4 и 5 преобразования координат, выходы которых соединены с одними из входов триггеров 6 и 7, первый электроакустический преобразователь 8, акустически связанный с линейными координатными микрофонами 2 и 3, второй электроакустический преобразователь 9,акустически связанный со звукоприемником. 10 и подключенный к блоку 11 коррекции, выход которого соединен с одним из входов элементов И 12 и 13, распределитель 14 импульсов, первый выход которого соединен с первым электро- акустическим преобразователем 8 и другими вход ами триггеров 6 и 7, выходы которых соединены с другими входами элементов И 12 и 13, выходы которых подключены к входам счет- чиков 15 и 16, второй выход распределителя 14 импульсов соединен с входо блока 11 коррекции и с электроакустическим преобразователем 9„
Первый вход коммутатора 17 подключен к выходам счетчиков 15 и 16, а выход является выходом устройства. Первый регистр 18 выходом соединен с вторым входом коммутатора 17 и первыми входами первого 19 и второго 20 блоков вычитания. Второй регистр 21 подключен первым входом к выходам счетчиков 15 и 16 и к второму входу блока 20 вычитания, выходом соеди
д
5 ,, с
5
0
5
нен с первым входом регистра 18 и с вторым входом блока 19 вычитания.
Выходы первого формирователя 22 сигналов подключены соответственно к первому входу второго формирователя 23 сигналов, к входам элементов И 24 и 25, выходы которых прдключены к входам распределителя 14 импульсов, выход элемента И 24 соединен с вторым входом формирователя 23 сигналов. Выходы блоков 4 и 5 преобразования и третий выход распределителя 14 импульсов подключены к входам элемента И 26 выход которого соединен с первым входом элемента И 27, другой вход которого подключен к выходу элемента И 25.
Устройство содержит также элементы И 28 и 29, блок 30 сравнения, блок 31 синхронизации, первьи 32 и второй 33 блоки умножения, первый
34и второй 35 элементы ИЛИ, элементы 36 и 37 задержки, счетчик 38,эле,мент НЕ 39, первую 40 и вторую 41 группы элементов И, Причем первый выход блока 19 вычитания подключен к первому входу блока 32 умножения, выход которого с первым входом блока 30 сравнения. Первый вькод блока 20 вычитания подключен к первому входу блока 33 умножения, выход которого подключен к второму входу блока 30 сравнения, первый выход которого подключен к первому входу элемента ШШ 34, второй вход которого подключен к выходу формирователя 23 сигналов-. Выход элемента ИЛИ 34 подключен к первому управляющему входу ком- -гутатора 17, подключенного вторым управляющим входом к выходу элемента И 27, первому входу элемента ИЛИ
35и через элемент 36 задержки к второму входу регистра 18.
Второй выход блока 30 сравнения подключен к второму входу элемента ИЛИ 35, выход которого через элемент 37 задержки подключен к второму входу регистра 21. Выход элемента И 28, первый вход которого подключен к первому входу элемента И 29 и к выходу элемента И 26, соединен с первым входом счетчика 38, другой вход которого соединен с выходом формирователя 22 сигналов. Первый выход счетчика 38 подключен к одному из входов первой группы 40 элементов И, выход которой соединен с третьим входом регистра 18, второй выход счет
чика 38 соединен с одними из входов второй группы 41 элементы И, выход которой соединен с третьим входом регистра 21. Другие входы групп 40 и 41 элементов И подключены к выхода счетчиков 16 и 15.
Третий выход счетчика 38 соединен с вторым входом элемента И 29, выход которого соединен с входом блока 31 синхронизации, и через элемент НЕ 39 подключен к второму входу элемента И 28. Третьи входы элементов И 28 и 29 подключены к выходу элемента И 24, соответствуюгцие выходы блока 31 синхронизации - к входам синхроимпульсов блоков 19 и 20 вычитания, блоков 32 и 33 умножения и блока 30 сравнения.
Устройство работает следующим образом.
В устройстве реализуются два режима работы - дискретный и непрерывный. Режим работы устройства задается органами управления - кнопками Кн1 и Кн2 на входе формирователя 22 сигналов (фиг.1). Дискретньй режим работы устройства осуществляется включением Кн1, при этом Кн2 выключена. В непрерывном режиме обе кнопки включены.
Рассмотрим работу устройства в дискретном режиме. Электроакустический преобразователь 8 (съемник координат) помещают на рабочем поле планшета 1 и нажимают при этом Кн, из формирователя 22 сигналов в распределитель 14 импульсов и на элемент И 27 поступает через элемент И 25 сигнал о работе устройства в дискрет ном режиме и формирует такты .работы устройства.
В первом такте сигналом с второго выхода распределителя 14 импульсов
запускается электроакустический преобразователь 9 и разрешается автопод- стройка генератора тактовой частоты (не показан) блока 11 коррекции. После того, как звуковой сигнал, излучаемый электроакустическим преобразователем 9, достигает звукоприемника 10, на выходе последнего появляется сигнал, который осуществляет подстройку генератора.тактовой частоты блока 11, на чем такт коррекции заканчивается, и частота генератора соответствует текущим климатическим условиям.Во втором такте распределитель 14 импульсов запускает (сигналом с пер- fO
5
20194
вого выхода) электроакустический пре-..-. образователь 8 и триггеры 6 и 7 устанавливаются в единичное состояние, чем разрешается поступление тактовых импульсов из блока 11 в счетчики 15 и 16 через элементы И 12 и 13. В момент, когда звуковой сигнал, излучаемый электроакустическим преобразователем 8, достигает определенного микрофона 2(3),на его выходе появля5
ется сигнал, которьй пройдя блок
0
5
0
4(5) преобразования, устанавливает триггер 6(7) в нулевое состояние и тем самым прекращает поступление тактовых импульсов через элемент И 12(13) на вход счетчика 15 (16).
Содержимое счетчиков 15 и 16 соответствует координатам считываемой точки. Одновременно с поступлением сигналов с блоков 4 и 5 преобразования и сигнала с третьего выхода распределителя 14 импульсов на выходе элемента И 26 появляется сигнал, который, пройдя элемент И 27, разрешает выдачу информации в ЭВМ через коммутатор 17. С окончанием этого такта устройство переходит в исходное состояние и готово к съему координат очередной точки изображения.
В непрерывном режиме работы устройства оператор помещает электроакустический преобразователь 8 на рабочем поле планшета 1 в точку обводимого контура изображения и на- 5 жимает Кн1 и Кн2. При включенных Кн1 и Кн2 формирователь 22 формирует сигнал о работе устройства в непрерывном режиме, который поступает через элемент И 24 в распределитель 14, формирователь 23 сигналов и на вход элементов И 28 и 29. В непрерывном режиме работы устройства электроакустический преобразователь 8 излучает ультразвуковые волны непрерывно с определенной частотой.
Распределитель 14 импульсов организует следующие такты работы устройства. Первый такт работы аналогичен описанному выше. Во втором такте распределитель 14 запускает электроакустический преобразователь 8 и триггеры 6 и 7 устанавливаю ся в единичное состояние, чем разрешается поступление тактовых импульсов иэ блока 1 1 в счетчики 15 и 16 через элементы И 12 и 13. В момент, когда звуковой сигнал, излучаемый электроакустическим преобразователем 8, дости5
0
5
гает определенного микрофона 2(3), на его выходе появляется сигнал, ко- торьй, пройдя блок 4(5) преобразования, устанавливает триггер 6(7) в нулевое состояние и тем самым прекращает поступление тактовых импульсов через элемент И 12(13) на вход счетчика 15(16)-. Содержимое счетчиков 15 и 16 соответствует координате считываемой точки.
Одновременно с поступлением сиг- налов с блоков 4 и 5 преобразования и сигнала с третьего выхода распреде
20
лителя 14 на выходе элемента И 26 ii: наоборот, считаются характерными появляется сигнал, который через эле- точками данной кривой. В процессе мент И 28 поступает на вход счетчика такой обработки координаты характер- 38. В результате сигналом с первого счетчика 38 разрешается запись координат первой считываемой точки через группу элементов И 40 в регистр 18. При снятии координат второй точки изображения сигналом с второго выхода счетчика 38 разрешается запись координат через группу элементов 25 И 41 в регистр 21. В результате снятия координат третьей точки сигналом с третьего выхода счетчика 38 разреных точек поступают на выход устройства для ввода в ЭВМ, а координаты точек, лежащих на прямолинейных уча- сках вводимой кривой, на выход устройства не поступают и в ЭВМ не вводятся.
Для анализа формы вводимой кривой в устройстве определяются элементарные приращения координат X и У у каж дой последующей точки относительно предыдущей, для чего координаты первой точки А, 11
шается поступление сигнала на вход блока 31 синхронизации через элемент И 29, а также через элемент НЕ 39 запрещается дальнейшее поступление сигналов через элемент И 28 на вход счетчика 38. При этом на вьпсодах блока 31 синхронизации поочередно форми30
Для анализа формы вводимой криво в устройстве определяются элементар ные приращения координат X и У у ка дой последующей точки относительно предыдущей, для чего координаты пер вой точки А, 11
. записываются в регист второй точки АО, - в регистр 21
координаты третьей точки А содержатся в счетчиках 15 и 16, при этом в блок 19 вычитания поступают координаты из регистров 18 и 21, в блок 20 - из регистров 18 и 21, а в блок
руются управляющие тактовые импульсм, 20 - из регистра 18 и счетчиков 15 которые обеспечивают обработку считан- и 16. Блок 19 вычитания определяет
разности дХ, &, а блок 20 вычитания - разности ..о АОО ,
ной информации при непрерывном ре- жиме.
Суть метода обработки информации в непрерывном режиме, заложенного в предлагаемом устройстве для считывания графической информации, состоит в определении лХ|, &Y- для каждой точки двухмерного информационного массива, определении произведений AXj лУ,, и uXj., &Y и сравнении этих произведений с заданной точностью, где лХ Х.-Х, &Х;,
40
45
д.-ОО
Значения дХ,( и дУ поступают в блок 33 умножения, а значения дХ и йУ, - в блок 32 умножения, причем на выходе блока 33 получается произ ведение йХ,-:йУ,, а на выходе блока 32 умножения - произведение uX-j-uY, Сравнивая между собой значения
ЛХ . дУ„
и дХ,- дУ, , можно определить
Х:
-X.
bY: У; -У,
0 о i-l 0 Х„, Y, , X,, у. , Х., , У;., - координаты начальной (илп информативной), i-й и (1-1)-й точек соответственно.
Иными словами, реализуется с заданной точностью критерий выборки в соответствии с выражением
50
лежат точки А , А,
прямой или нет. При неравенстве про
А, на одной
изведений дХ
uY, и
лХ„
- лУ, дается разрешение на вывод координат точки А в ЭВМ, а также перезапись коорд нат точки Ар в регистр 18, а точки Ад - в регрЕстр 21, при этрм координаты точки АО, стираются.
При обнаружении признака прямоли нейного участка координаты каждой последующей точки на этой кривой со
ДХ-ЛУ.., 4Х;
4Y
При этом точность (или погрешность; сравнения задается оператором длиной разрядной сетки сравниваемых произведений
йХ, AY,, . йХ.., 4Y..
Устранение избыточности вводимой двухмерной информации осуществляется в реальном масштабе времени в процессе анализа текущих координат. При этом выявляются прямолинейные участки кривой. Точки перехода из криволинейного участка в прямолинейный,
0
i: наоборот, считаются характерными точками данной кривой. В процессе такой обработки координаты характер- 5
30
ных точек поступают на выход устройства для ввода в ЭВМ, а координаты точек, лежащих на прямолинейных уча- сках вводимой кривой, на выход устройства не поступают и в ЭВМ не вводятся.
Для анализа формы вводимой кривой в устройстве определяются элементарные приращения координат X и У у каждой последующей точки относительно предыдущей, для чего координаты пер вой точки А, 11
. записываются в регистр второй точки АО, - в регистр 21,
координаты третьей точки А содержатся в счетчиках 15 и 16, при этом в блок 19 вычитания поступают координаты из регистров 18 и 21, в блок 20 - из регистров 18 и 21, а в блок
разности дХ, &, а блок 20 вычитания - разности ..о АОО ,
д.-ОО
Значения дХ,( и дУ поступают в блок 33 умножения, а значения дХ и йУ, - в блок 32 умножения, причем на выходе блока 33 получается произ-- ведение йХ,-:йУ,, а на выходе блока 32 умножения - произведение uX-j-uY,, Сравнивая между собой значения
ЛХ . дУ„
и дХ,- дУ, , можно определить.
0
лежат точки А , А,
прямой или нет. При неравенстве проА, на одной
изведений дХ
uY, и
лХ„
- лУ, дается разрешение на вывод координат точки А в ЭВМ, а также перезапись координат точки Ар в регистр 18, а точки Ад - в регрЕстр 21, при этрм координаты точки АО, стираются.
При обнаружении признака прямолинейного участка координаты каждой последующей точки на этой кривой сопоставляются с координатами начальной точки участка Л, , этим достигается высокая точность анализа и исключается ошибочное представлеяие криволинейных участков с большим радиусом кривизны прямолинейными. При обнаружении криволинейного участка координаты каждой последующей точки на этой кривой анализируются с координатами каждой предыдущей точки, и при вы- .полнении условия неравенства координаты предыдущей точки передаются в ЭВМ. При этом количество выводимых точек на единицу длины участка кривой зависит от кривизны участка и величины координаты.
Сигнал а с первого выхода блока 31 синхронизации разрешает ввод координат точек А , А
О1
00 02 в °
ки 19 И 20 вычитания соответственно, при этом блок 19 определяет разность координат Л,-А, а блок 20 .., На первом и втором выходах блоков 19 и 20 вычитания формируются сигналы, соответствующие значениям дХ, дУ, дХ , uY,, которые поступают на входы блоков 32 и 33 умножения, где по сигналу S с второго вых ода блока 31 синхронизации определяются значения произведений дХ ДУ и йХ, дУ,,
Результаты вычислений в блоках 32 и 33 умножения поступают в блок 30 сравнения, где по сигналу Ь с третьего выхода блока 31 синхронизации они сравниваются.
В данном случае результатом является сигнал неравенства, который через элемент ИЛИ 34 поступает в коммутатор 17, тем самым разрешая передачу координат точки А, находящейся в регистре 18, в ЭВМ, Далее этот же сигнал, пройдя элемент 36 задержки, разрешает перезапись координат точки регистра 21 в регистр 18. Кроме того, сигнал неравенства с элемента ИЛИ 34 поступает через элемент ИЛИ 35 и элемент 37, время задержки которого больше времени задержки элемента 36, в регистр 21, чем разрешает перезапись координат точки счетчиков 15 и 16 в регистр 21, при этом координаты точки Ад в регистре 21 автоматически стираются.
При снятии координат очередной точки дальнейшая ее обработка производится аналогично описанному выше.
0
5
0
5
5
0
5
0
При съеме координат точки А произведения д Х ЛУ, и дХ,- дУ равны. Сигнал равенства с второго выхода блока 30 сравнения через элемент ИЛИ 35 и элемент 37 задержки поступает на управляющий вход регистра 21 н разрешает перезапись координаты точки А из счетчиков 15 и 16 в регистр 21.
Б следующем цикле съема в счетчиках 15 и 16 содержатся координаты точки APJ , как и ранее производятся определения разностей в блоке 19 и в блоке 20 Agj-A j, определяются произведения лХ, дУ и дХ дУ; где дХ,Х. -X,
.. -УЛ
0
дХ,,
Аог
Далее производится сравнение произведений. В этом случае на выходе блока 30 сравнения появляется сигнал,. который разрешает через элемент ИЛИ 34 вьщачу в ЭВМ координаты точки из .регистра 18, через элемент 36 задержки перезапись кобрдинаты точки А из регистра 21 в регистр 18 и через элемент ИЛИ 35 и элемент 37 задержки перезапись координаты точки А, со счетчиков 15 и 16 в регистр 21. Далее устройство работает, как описано выше.
I
По окончании ввода кривой, т.е.
съемник координат снят с рабочего поля планшета, контакты Кн1 размыкаются и сигнал с формирователя 22 поступает в формирователь 23, где формируется сигнал окончания съема представляющий собой два последовательных импульса, причем первый импульс через элемент ИЛИ 34 поступает на коммутатор 17, разрешая вывод координаты
и
в ЭВМ, затем с выхода элемента
5
36 задержки поступает на управляющий вход регистра 18, разрешая перезапись координат точки А ,g в регистр 18. Второй импульс окончания съема через элемент ИЛИ 34 разрешает выдачу в ЭВМ через коммутатор 17 содержимого регистра 18, т.е. координаты точки А . Одновременно с этим сигнал .с формирователя 22 поступает на второй вход счетчика 38, который устанавливается в нулевое состояние, в результате чего устройство готово К съему координат точек очередной кривой.
Процесс анализа вводимой кривой (фиг.2), а также результаты записи координат точек приведены в таблице.
В предлагаемом устройстве в качестве критерия выборки характерных точек информационного массива используется неравенство произведений приращений по ортогональным координатам, в отличие от неравенства частных делений приращений в известном устройстве. Это позволяет упростить структуру устройства, так как для реализации блоков умножения требуется в 1,2-1,5 раза меньше аппаратурных затрат, чем для реализации блоков деления, приблизительно в это же количество раз уменьшить временные затраты на выполнение функции умножения по сравнению с функцией деления,
отказаться от блока управления, имеющегося в известном устройстве, так как значения множителя и множимого в предлагаемом устройстве могут быть любыми, в том числе равными нулю,что
также упрощает устройство, однако снижает несколько быстродействие устройства при обработке ппямых линий, параллельных одной из осей координат. Непосредственная запись двух
1112920
первых точек каждого нового информационного массива без определения приращений и дальнейшего их анализа повышает быстродействие предлагаемого устройства при начале ввода каждо- 5 го информационного массива.
Формула изобретения
Устройство для считывания графической информации, содержащее планшет, на взаимно перпендикулярных сторонах которого установлены линейные координатные микрофоны, подключенные к входам блоков преобразования координат, выходы которых соединены с одними из входов первого и второго три геров, первый электроакустический преобразователь, акустически связанный с линейными координатными микрофонами второй электроакустический преобразователь, акустически связанный со звукоприемником, выход которого подключен к первому входу блок коррекции, второй вход которого соединен с вторым электроакустическим преобразователем, а выход - с одними из входов первого и второго элементов И, распределитель импульсов, первый выход которого подключен к первому электроакустическому преобразователю и к другим входам первого и второго триггеров, выходы которых сое- |динены с другими входами первого и второго элементов И, выходы которых подключены соответственно к входам первого и второго счетчиков, второй выход распределителя импульсов соединен с вторым входом блока коррекции, коммутатор, первый вход которого подключен к выходам первого и второго счетчиков, а выход является выходом устройства, первый регистр, выход которого соединен с вторым входом коммутатора, и с первьми, входами первого и второго блоков вычитания, второй регистр, первый вход которого, соединенньй с вторым входом блока вычитания, подключен к выходам первого и второго счетчиков, выход второго регистра соединен с первым входом первого регистра и с вторым входом первого блока вычитания, первый формирователь сигналов, выходы которого подключены соответственно к первому входу второго формирователя сигналов и к входам третьего и четвертого элементов И, выходы которых соединены
19
12
5
O
5
0
5
0
5
0
5
0
5
с входами распределителя импульсов, выход третьего элемента И подключен к второму входу второго формирователя сигналов, выходы блоков преобразования и третий выход распределителя импульсов соединены с входами пятого элемента И, выход которого подключен к первому входу шестого элемента И, второй вход которого соединен с выходом четвертого элемента И, седьмой и восьмой элементы И, блок сравнения и блок синхронизации,о т- личающееся тем, что, с целью упрощения устройства, оно содержит первый и второй, блоки умножения, первый и второй элементы ИЛИ, первый и второй элементы задержки, третий счетчик, элемент НЕ, первую и вторую группы элементов И, первый выход первого блока вычитания подключен к первому входу первого блока умножения, выуод которого соединен с первым входом блока сравнения, второй вход которого подключен к выходу второго блока умножения, первый вход которого соединен с первым выходом второго блока вычитания, второй выход которого подключен к второму входу первого блока умножения, а второй вход второго блока умножения соединен с вторым выходом первого блока вычитания,- первый выход блока сравнения подключен к первому входу первого элемента ИЛИ, второй вход которого соединен с выходом второго формирователя сигналов, а выход - с входом первого элемента задержки, с первьм входом второго элемента ИЛИ и с третьим входом коммутатора, четвертый вход которого подключен к выходу шестого элемента И, выход первого элемента задержки соединен с вторым входом первого регистра, второй выход блока сравнения подключен к второму входу второго элемента ИЛИ, выход которого соединен через второй элемент задержки с вторым входом второго регистра, первые входы седьмого и восьмого элементов И подключены к выходу пятого элемента И, выход седьмого элемента И соединен с первым входом третьего счетчика, второй вход которого подключен к одному из выходов первого формирователя сигналов, первый выход третьего счетчика соединен с одними из входов первой группы элементов И, выход которой подключён к третьему входу первого регистра.
13
второй выход третьего счетчика соеди нен с одними из входов второй группы элементов И, выход которой подключен к третьему входу второго регистра, другие входы первой и второй групп элементов И соединены соответственно с выходами первого и второго счетчиков, третий выход третьего счетчика подключен к входу элемента НЕ и к
9201914
второму входу восьмого элемента И, выход которого соединен с входом блока синхронизации, выходы которого подключены к соответствующим вхо- 5 дам синхроимпульсов блока вычитания, блоков умножения и блока сравнения, а выход элемента НЕ соединен с третьим входом седьмого элемента И.
37
4MB
36 3V
сн-ск
35
фиг.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1982 |
|
SU1084837A1 |
| Устройство для считывания графической информации | 1981 |
|
SU959110A1 |
| Устройство для сокращения избыточности информации | 1982 |
|
SU1075289A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1292020A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1168981A2 |
| Устройство для сжатия информации | 1981 |
|
SU970421A1 |
| Устройство для считывания контуров изображений | 1981 |
|
SU1007114A1 |
| Генератор векторов | 1981 |
|
SU1010646A1 |
| Устройство для сокращения избыточности информации | 1980 |
|
SU959129A1 |
| Устройство для считывания графической информации | 1980 |
|
SU963014A2 |
Изобретение относится к вычислительной технике, в частности к полуавтоматическим устройствам считывания координат элементов изображения, принцип действия которых основан на измерении времени распространения ультразвуковой волны в различных средах, и может быть использовано в автоматизированных системах обработки информации в машиностроении и картографии. Цель изобретения состоит в упрощении устройства, для чего в него введены два блока умножения, элементы задержки, ИЛИ, НЕ, счетчик, при этом изменился метод обработки информации, суть которого состоит в определении йХ и iY для каждой точки двухмерного массива, определении произведений лХ, дУ;., и &Х., iY и сравнении этих произведений с заданной точностью. Е процессе такой обработ- i ки координаты характерных точек поступают на выход устройства для ввода в ЭВМ, а координаты точек, лежащих на прямолинейных участках кривой, на выход устройства не поступают и в ЭВМ не вводятся. 2 ил. (Л to со ю
CI
00
yw
W.ZL-.
ot
Of OS 07
ВНИИПИ
Заказ 274/50
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 673
Подписное
| Устройство для считывания графической информации | 1981 |
|
SU959110A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084837A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
