1007
2. Устройство по п. 1, о т л ичающееся тем, что блок поиска содержит счетчик с дешифратором, многоканальный переключатель, первый и второй регистры, входы которых являются входами блока поиска, третий и четвертый регистры, выходы .которых являются выходами блока поиска, и формирователь импульсов, при этом выход первого регистра подключен к первому входу многоканального переключателя, выход второго регистра соединен с третьим входом многока k .
нального переключателя, первый выход счетчика с дешифратором подключен к формирователю импульсов, выходы которого соединены с пятым и шестым входами многоканального переключателя, второй выход счетчика с дешифратором подключен к седьмому входу многоканального переключателя, а третий выход соединен с первыми входами третьего и четвертого регистров, вторые входы которых подключены к выходу многоканального переключателя .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для корреляционной обработки изображений | 1989 |
|
SU1705843A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Генератор символов | 1987 |
|
SU1446643A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |
| Устройство для поиска информации на микрофише | 1982 |
|
SU1264125A1 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ СИГНАЛОВ С ВЫБОРОЧНОЙ ПЕРЕЗАПИСЬЮ | 1992 |
|
RU2029389C1 |
| Устройство для считывания графической информации | 1985 |
|
SU1292020A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЭТАЛОННОЙ ИНФОРМАЦИИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 2012 |
|
RU2520386C1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
1. УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ КОНТУРОВ ИЗОБРАЖЕНИЙ, содержащее двухкоординатный стол, оптически связанный с матричным фотопреобразователем, блок усилителей-формирователей, подключеный к матричному фотопреобразователю, блок управления, связанный с двигателями двухкоординатного стола, и блок определения направления перемещения фотопреобразователя, отличающеес я тем, что, с целью увеличения точности считывания, оно содержит блок фильтрации, блок памяти координат, блок усреднения направления и блок поиска, при этом вход блока фильтрации соединен с выходом блока усилителей-формирователей, первый выход подключен к входу блока определения направления перемещения фотопреобразователя, д второй выход соединен с первыми выходами блока поиска и блока управления, выход б/(ока определения направления перемещения фотопреобразователя подключен к первому входу блока памяти координат и к вторым входам блока поиска и блока управления, вход блока усреднения направления соединен с выходом блока памяти координат, а выход подключен к третьему входу блока поиска, выход которого соединен с третьим входом блока управления.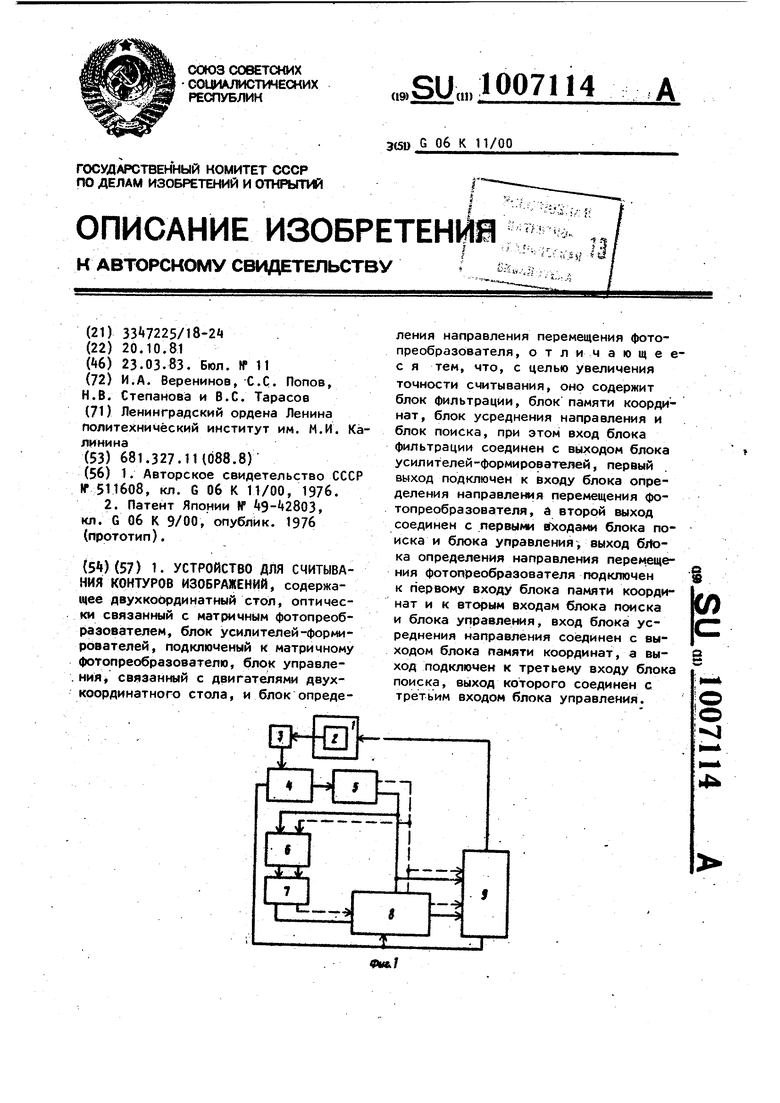
. . . 1- . - .
Изобретение относится к автоматике и вычислительной технике, в яастности к устройствам для- считывания контуров изображений, и может быть использовано для анализа и ввода в ЭВМ графической информации.
Известно устройство для считывания графической информации, в котором информацию о фрагменте изображения , необходимую для определения направления слежения, получают при локальном сканировании электронным лучом Cl
Недостатками известного устройства являютсядсложность и низкая томность, обусловленные использованием средств аналоговой техники и нелинейностью системы развертки электронного луча.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство,содержащее двухкоординатный стол, оптически связанный с ним матричный фотопреобразователь, блок усилителей-формирователей, подключенный к матричному фотопреобразователю, блок управления связанный с двигателями двухкоординатного стола, и блок определения направления Г2.
Недостаток этого устройства заключается в низкой точности считывания информации, связанный с низкой помехоустойчивостью устройства при наличии различных дефектов изображения.
Целью изобретения является увеличение точности считывания контуров изображений.
2
Поставленная цель достигается тем что в устройство для считывания контуров изображений, содержащее двухкоординатный .стол, оптически связанный с ним матричный фотопреобразователь, блок усилителей-формирователей, подключенный к матричному фотопреобразователю, блок управления связанный с двигателями двухкоординатного стола ,и блок определения направления перемещения фотопреобразователя, введены блок фильтрации, блок памяти координат, блок усреднения направления и блок поиска, при этом вход блока фильтрации соединен с выходом блока усилителей-формирователей , первый выход подключен к входу блока определения направления перемещения.фотопреобразователя, а второй выход соединен с первыми входами блока поиска и блока управления, выход блока определения направления пе земещения фотопреобразователя подключен к первому входу блока памяти координат и к вторым входам блока поиска и блока управления, вход блока усреднения направления соединен с выходом блока памяти координат, а выход подключен к третьему входу блока поиска, выход которого соединен с третьим входом блока управления.
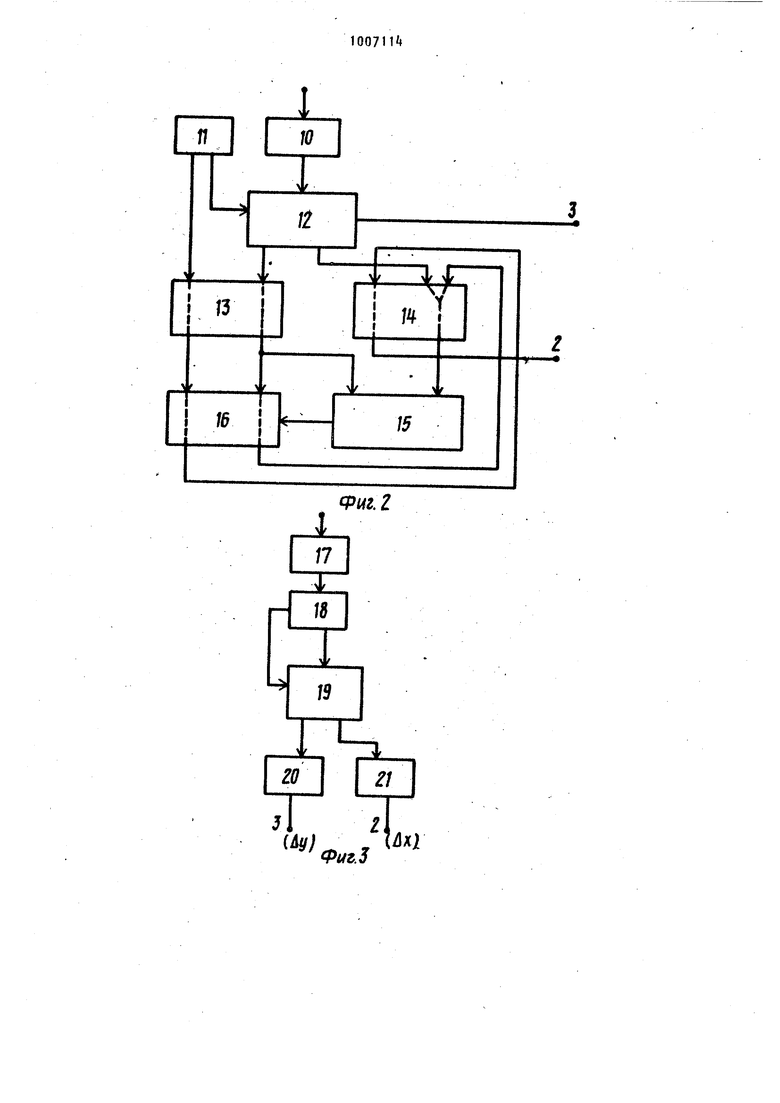
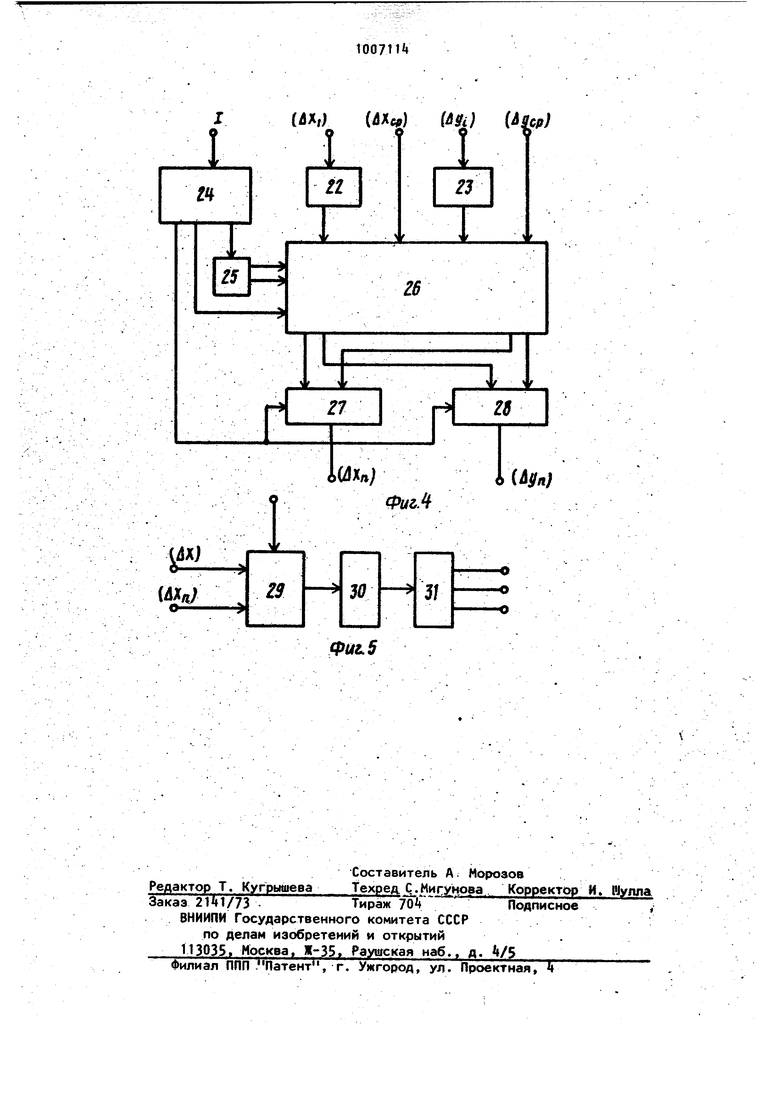
Блок поиска содержит счетчик с дешифратором, многоканальный переключатель, первый и второй регистры, входы которых являются входами блока поиска, третий и четвертый регистры, выходы которых являются выходами блока поиска, и формирова31тель импульсов, при этом выход первого регистра, подключен к первому входу многоканального перек/Иочателя, выход второго регистра соединен с третьим входом многоканального переключателя, первый выход см тчика с дешифратором .подключен к формирователю импульсов, выходы которого соединены с пятым и шестым входами многоканального переключателя, второй выход счётчика с дешифратором подключен к седьмому входу многоканального переключателя, а третий вы ход соединен с первыми входами третьего и четвертого регистров, вторы входы которых подключены к выходу многоканального переключателя. На фиг. 1 изображена блок-схема устройства для считывания контуров изображений; на фиг. f - схема блок фильтрации; на фиг. 3 схема блока определения направлений перемещения фотопреобразователя; на фиг. - сх ма блока поиска; на фиг. 5 схема блока управления.Устройство для считывания конту- ров изображений включает (фиг. 1) двухкоординатный стол 1 с носителем изображения и двигателями (не показаны), матричный фотопреобразователь (фотоматрица) 2, блок, 3 усилителей-формирователей, блок 4 фильтрации; блок 5 определения направления перемещения фотопреобразователя блок 6 памяти координат, блок 7 усреднения направления, блок 8 поиска блок 9 управления. Блок t фильтрации состоит (фиг. 2 из регистра 10, постоянного запоминающего устройства 11, элемента 12 сравнения, регистров 13 и И, элеме та, 15 сравнения и вентилей 16. Блок 5 определения направления пе ремещения фотопреобразователя включает (фиг. З) постоянное запоминающее устройство 17, регистр 18, переключатели 19 и регистры 20 и 21. Блок 8 поиска состоит (фиг. Ц) из регистров 22 и 23, счетчика 2 с дешифратором (на чертеже объединены в один блок), формирователя 25 импульсов многоканального переключателя 26 и регистров 27 и 28, Блок 9 управления включает (фиг. 5) переключатели 29, кодоимпульсный преобразователь 30 и формирователь 31 фаз. Устройство для считывания контуров изображения работает следую(Цим образом. Аналоговые сигналы с элементов фотопреобразователя 2 поступают в блок 3 усилителей-формирователей, в котором имеются пороговые элементы, разделяющие сигналы на черные и белые. Двоичная информация о фрагменте изображения из блока 3 поступает на вход блока k фильтрации. В блоке фильтрации фрагмент изображения сравнивается с каждым из набора типовых фрагментов и из них выбирается наиболее похожий на фактическую картину. За меру сходства принимается число совпадений двоичных сигналов с элементов фактического и типового фрагментов. В блоке .фильтрации (фиг. 3) двоичная информация о фрагменте изображения запоминается в регистре 10, откуда периодически подается на вход элемента 12 сравнения . На другой вход элемента сравнения поступает информация о каждом из типовых фрагментов, хранящихся в постоянном запоминающем устройстве (ПЗУ.) 11. Число п 1 несовпадений элементов фактического и типового фрагментов с выхода элемента 12 сравнения поступает на регистр И и запоминается в нем. В группу разрядов этого регистра, отведенную под адрес типового фрагмента, заносится число О - адрес первого типового фрагмента . Следующий результат сравне- . ния - число несовпадений п 2 записывается в регистр 13, туда же заносится и адрес типового фрагмента. Числа п 1 и п 2 поступают на элемент 15 сравнения. Если п 1, то сигнал с выхода элемента 15 сравнения открывает вентили 16, и содержимое регистра 13, т.е. число несовпадений и адрес типового фрагмента, переписывается в регистр 1. В противном случае (т.е. при п t) в рег «стре Н сохраняс-ся находящееся там слово. В регистрах 14, 13 и группе вентилей 16 левая часть разрядов отведена под адрес типового фрагмента, а правая - под число несовпадений. Передача информации с входов на выходы в этих устройствах условно показана на фиг. 2 пунктиром. После переброса всех типовых фрагментов адрес наиболее похожего на фактический оказывается в регистре Ц. 510 Таким образом, на этом этапе обработки информации происходит замена истинного фрагмента, содержащего помехи, типовым сглаженным фрагментом, благодаря чему осуществляется фильтрация помех, Адрес типового фрагмента, аппроксимирующего фактический, с выхода блока t фильтрации поступает на вход блока 5 определения направления перемещения фотопреобразователя (фиг 1) Схема того блока приведена на фиг. 3. Он содержит ПЗУ 17, регистры 18, 20, 21, переключатели 19- В ПЗУ 17 хранятся характеристики типовых фрагментов, причем адреса у них те же самые, что и у соответствующих типовых фрагментов в ПЗУ 11 блока А фильтрации (фиг. 2). По адресу, по ступившему на вход блока 5 из ПЗУ 17 (фиг. З) на регистр 18, выбирается характеристика типового фрагмента, . аппроксимирующего фактический. Эта характеристика включает в себя, еледующие признаки: 1 ) тип контура горизоитальный или вертикальный, причем под горизонтальным понимается такой, у которого тангенс угла наклона к оси х по модулю меньше Г, т.е. ftgoLKl; 2)-число а 1до6для горизонтального контура или а ctgtilдля вертикального ; 3) cfсмещение центра фотоматрицы по вертикали или горизонтали относительно контура. Функция блока 1 определе.нйя направ|1ения состоит в нахождении числа Лх и Лу, равных количеству шагов, которые должен сделать двигатель для перемещения фотоматрицы в следующую точку контура. При этом для горизонатльного контура ,перемещение по х задается числом k, а A вычисляется по формуле ctgcl ka Затем к числу Ду добавляется поправ ка (Л. Для вертикального контура, наоборот, ду задается, а дх вычисля ется. Число k выбирается равным целой степени двойки, тогда умножение выполняется путем сдвига. Работ блока 5 поясняется на фиг. 3. Переключатели 19 управляются сигналом Тип контура, поступающим на вход. На вхо/1 переключателей 19 подается характеристика выбранного типового фрагмента. Если фрагмент горизонтальный, то в регистр 23 (для числа Ах) записывается k, а в регистр 20 (для йу) - число ka, т.е. а, сдвинутое на соответствующее число разрядов, и к содержимому регистра 20 прибавляется сГ. В случае вертикального фрагмента в регистр 20 . записывается k, а в регистр .21 - число ka и (f прибавляется к содержимому регистра 21. Число свыбирается из регистра 18. Приращения коорди- нат дх и у из регистров 20 и 21 блока 5 поступают: 1) на входы блока 9 управления (фиг. 1), где они преобразуются в последовательности импульсов, управляющие шаговыми двигателями; 2 в блок 8 поиска на входы (фиг. 1), где они запоминаютсяв регистрах на случай организации поиска контура; 3) в блок 6 памяти координат (фиг. 1), где хранятся результаты трех последних измерений, На фиг. 1 передача чисел Дх показана сплошными линиями, а чисел Лу пунктирными. В блоке 6 памяти координат координаты очередной точки контура х., у получаются путем сложения предыдущих значений координат с числами х и 4у: ,,+AX; .,. Блок 6 памяти координат состоит из двух одинаковых частей (для хранения координат X и у) , каждая из которых представляет собой регистровую память с последовательным доступом. Первый (входной) регистр одновременно является суммарным, так как в нем должно происходить сложение предыдущей координаты с ее приращением. С выходов блока 6. памяти координат значения координат точекконтура поступают в блок 7 усреднения направления (фиг. 1). Этот блок представляет собой микропрограммный автомат, состоящий из микропроцессорного набора (в нашем случае микросхем типа К 589) и ПЗУ, в котором хранится программа вычислений усредненного направления. Согласно этой программе в процессе слежения за контуром непрерывно определяются параметры прямой , соответствующей направяению, усредненному по результатам трех последних измерений, хранящихся в блоке 6 памяти координат (фиг. 1). Усреднение направления необходимо для организации движения в тех случаях, когда при движении по локальному направлению, формируемому блоком 5 (фиг. 1), фотоматрица оказывается на поле одного цвета вследствие ошибочного определения локального направления из-за наличия помех. В 71П этом случае блоком k фильтрации вырабатыв ется сигнал Нет контура, который с выхода блока k (фи1-. 1) или выход элемента 12 сравнения (фиг. 2) поступает на вход блока 8 по иска. Предположим, что контур с,ильно искажен помехами и произошло неверное определение локального направления блоком 5 (фиг. 1). Тогда после очередного шага на фотоматрицу будет спроецирован фрагмент белое поле. В этом случае блок 8 поиска вначале возвращает фотоматрицу, а затем организует движение в усредненном направлении по результатам предыдущих отсчетов. Если при движении в этом направлении контур вновь не обнаружен, то блок 8 поиска организует движение в перпендикулярном направле нии сначала в одну сторону, а затем в другую. После обнаружения контура слежение снова продолжается по локальному направлению, формируемому блоком 5 (фиг. 1). Блок 8 поиска (фиг. j) состоит из регистров 22 и 23 для текущих приращений координат .Дх , ЛУ счетчика с дешифратором 2, формирователя 25 импульсов, многоканальных переключателей 26, выходных регистров 27 и 28 для приращений координат ДХ|, дук в случае организации поиска. Счетчик 2 считает сигналы Нет контура, поступающие с выхода блока k фильтрации (фиг. 1). Первый сигнал, (выход счетчика 24, фиг. ) запускает формирователь 25 импульсов, который вырабатывает два. сдвинутых во времени импульса. По первому импульсу, поступающему на вход переключате ля 26, значен|1я Д х, д у с обратными знаками заносятся в регистры 27 и 28 для того, чтобы возвратить Матрицу в последнюю отслеженную точку контура. По второму импульсу, поступившему на вход переключателя 26 (фиг. ) значения ДХ(.р, ,. вычисленные в блоке 7 усреднения направления 8 (фиг. 1) и поступающие На входы переключателя 26 (фиг. k), передаются в выходные регистры 27 и 28 для организации движения в усредненномнаправлении . Если после такого движения контур не найден, то второй сигнал Нет контура (с выхода счетчика 2, фиг. «) производит запись Дх с инверсией знака в регистр 28 (для Ду„), а Ду ср - в регистр 27 (для Дхр). При этом задается направление перемещения, перпендикулярное к предыдущему. По третьему сигналу Нет контура (выход счетчика 2, фиг. Ц) знаки Ду, в регистрах 27 и 28 изменяются на противоположи ные. Одновременно прризводится удвоение чисел Дх, и так как нужно вернуться в исходную точку и затем продвинуться еще на такой же отрезок. Блок 9-управления (фиг. 1) преобразует поступившие на его вход значения приращений координат в сигналы, управляющие шаговыми двигателями. Блок 9 управления (фиг. 5) состоит из переключателей 29, кодо-импульсного преобразователя 30, формирователя 31 фаз. Переключатели 29 передают на вход кодо-импульсного преобразователя 30 сигнал ДХл (ду) для перемещения в локальном направлении или йх(ду,,) для поиска контура в зависимости от наличия или отсутствия сигнала Нет контура на входе. Кодо-импульсный преобразователь 30 преобразует число Дх(ду) в последовательность импульсов, а формирователь 31 фаз превращает каждый импульс в три сдвинутых по фазе импульса, непосредственно управляющие шаговым двигателем. Таким образом, введение блока фильтрации позволяет снизить требования к качеству изображений, а блоки памяти координат, усреднения направления и поиска - значительно уменьшить количество срывов при считывании контуров.
cp.e.J
tput.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для отслеживания контуров геометрических фигур | 1974 |
|
SU511608A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент Японии If , кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
