Изобретение относится к конструкциям устройств для отбора проб жидкостей и последующего дозирования их в виде отдельных точно заданных доз в анализаторы и может быть использовано в хими- ческой, нефтехимической, пищевой и других отраслях промышленности при отборе проб и транспортировании агрессивных и ядовитых жидкостей.
Цель изобретения - повыщение точ
ности дозирования, увеличение произво
дительности и возможности пробоотбора агрессивных и ядовитых жидкостей путем исключения контактирования их с окружающей средой и приводом, упрощение регулирования и обслуживания, а также повышение представительности пробы.
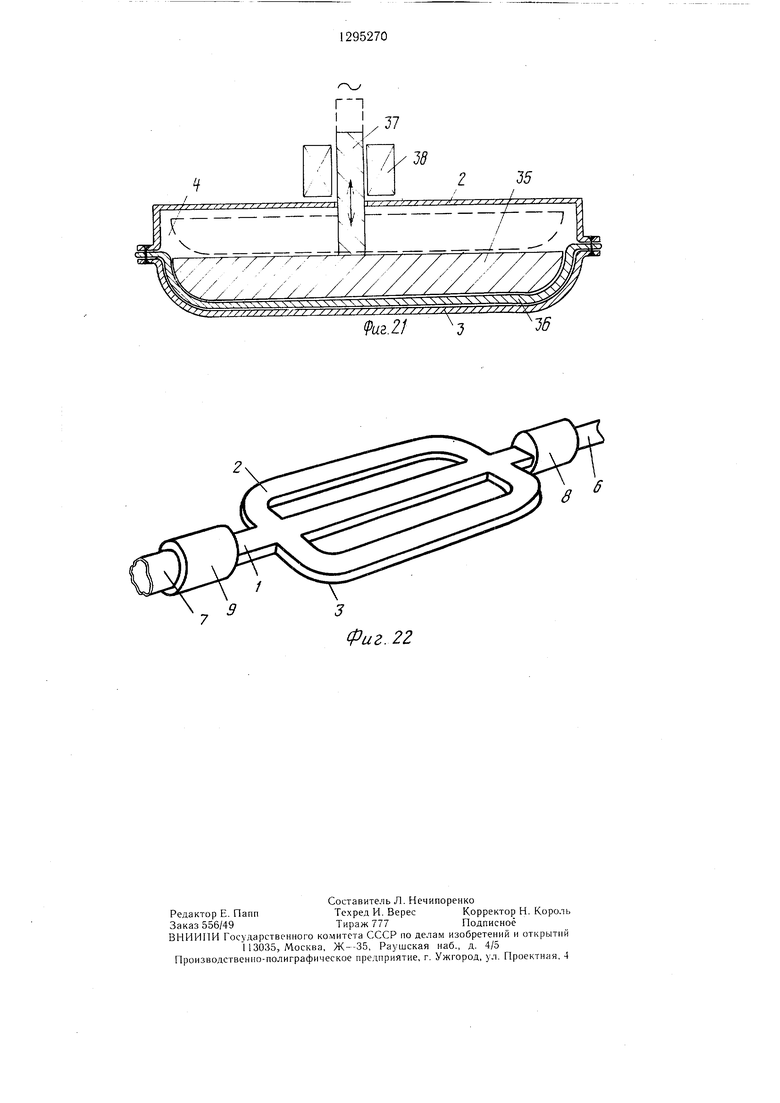
На фиг. 1 изображено устройство по первому варианту исполнения, продольный разрез; на фиг. 2 - устройство по второму варианту исполнения, продольный разрез; на фиг. 3 - то же, в процессе работы; на фиг. 4 - то же, поперечный разрез в процессе работы; на фиг. 5 - устройство по третьему варианту исполнения, продольный разрез; на фиг. 6 - сечение А-А на фиг. 5; на фиг. 7 - сечение Б-Б на фиг. 5; на фиг. 8 - устрой- ство по третьему варианту в процессе работы; на фиг. 9 - устройство по четвертому варианту исполнения, продольный разрез; на фиг. 10 - устройство по пятому варианту исполнения, продольный раз- рез; на фиг. 11 - то же, в процессе работы; на фиг. 12 - устройство по шестому варианту исполнения, продольный разрез; на фиг. 13 - то же, поперечный разрез; на фиг. 14 - устройство по седьмому варианту исполнения, попереч- ный разрез; на фиг. 15 - устройство по восьмому варианту исполнения, продольный разрез; на фиг. 16 - сечение В-В па фиг. 15; на фиг. 17 - сечение Г-Г на фиг. 15; на фиг. 18 - эластичный гибкий элемент при девятом варианте испол- нения устройства, продольный разрез; фиг. 19 - эластичный гибкий элемент при десятом варианте исполнения устройства, продольный разрез; на фиг. 20 - эластичный гибкий элемент при одиннадцатом варианте исполнения устройства, продольный разрез; на фиг. 21 - устройство по двенадцатому варианту исполнения, поперечный разрез; на фиг. 22 - устройство в аксонометрической проекции, общий вид.
Устройство для отбора проб, дозирования и нагнетания сред состоит из горизонтального корпуса 1 с крышкой 2 и днищем 3, в котором выполнена рабочая камера 4, эластичного гибкого эле1У ен- та 5, помещенного в рабочую камеру 4, патрубков ввода 6 жидкости и вывода 7 ее доз, гюдсоединенных к входу и выходу корпуса 1 соответственно, обратных подпру
0
,
0 n j 0 0
5
жиненных клапанов ввода 8 и вывода 9, размещенных между патрубками 6 и 7 и корпусом 1, и привода 10.
Первый вариант устройства. Эластичный гибкий элемент 5 выполнен в виде плоской ферромагнитной пластины, натянутой на днище 3 в рабочей камере 4 с возможностью волнообразного перемещения в вертикальном направлении вдоль оси корпуса под действием бегущего магнитного поля, а привод 10 выполнен в виде электромагнитных катушек (далее привод и катущки следуют под одной позицией - 10), установленных на крышке 2 вдоль корпуса 1.
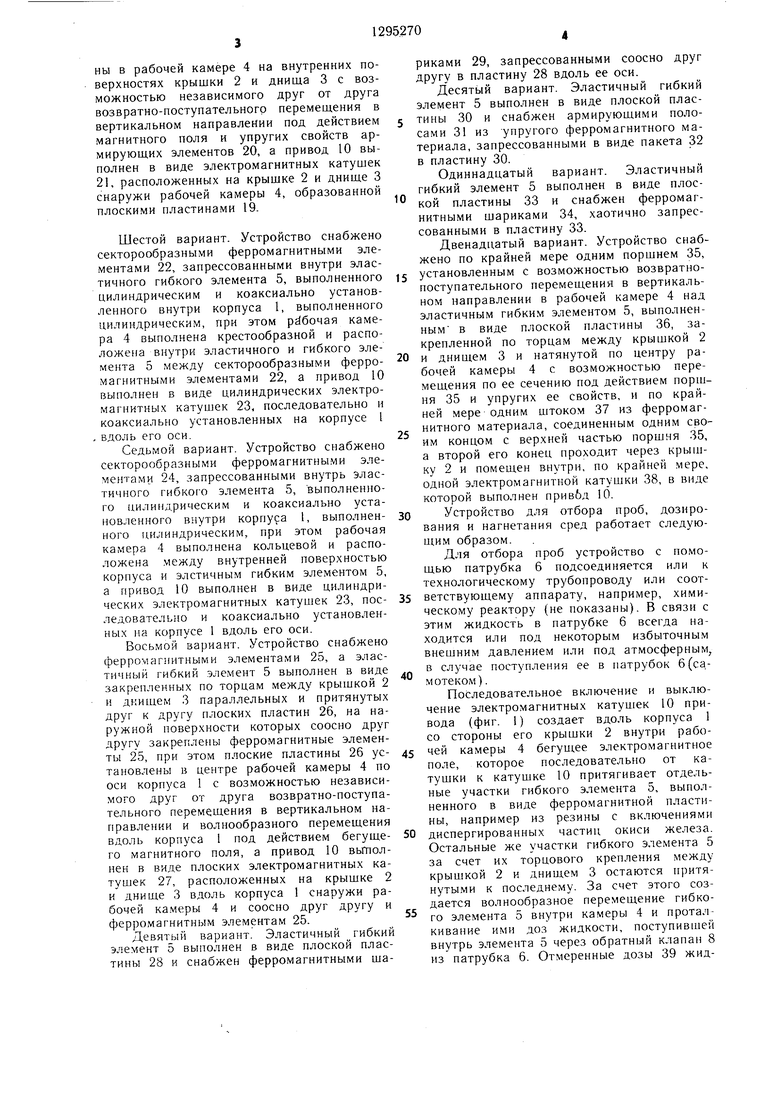
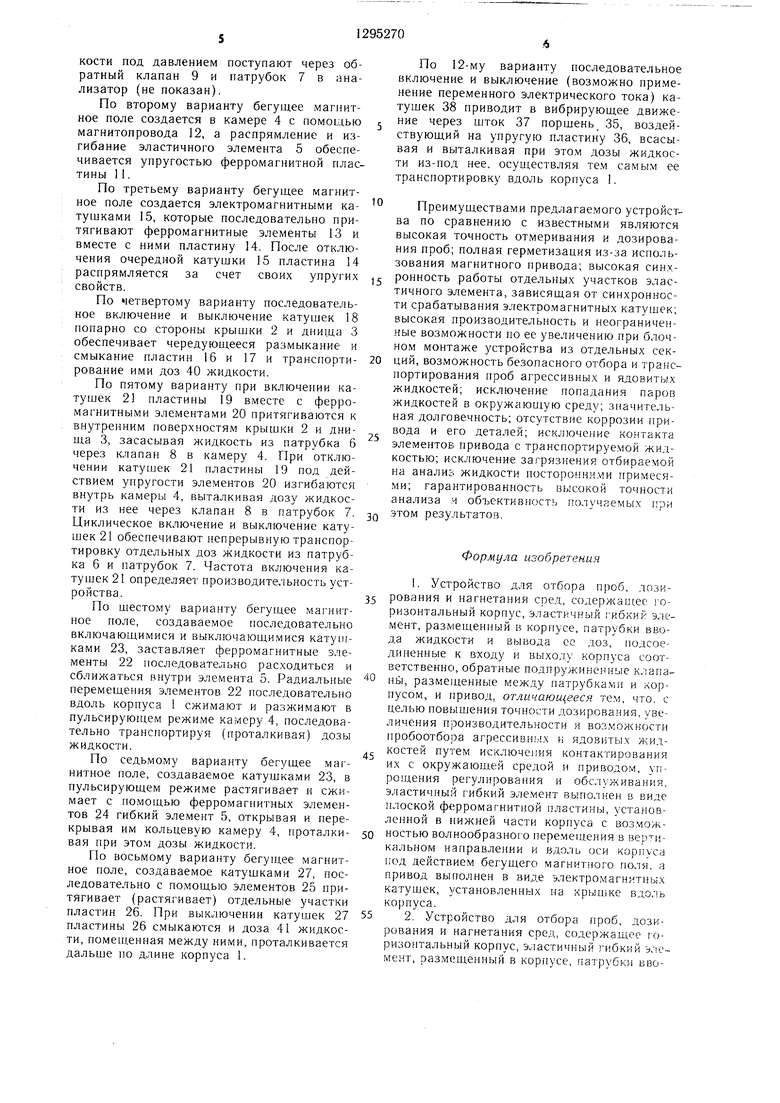
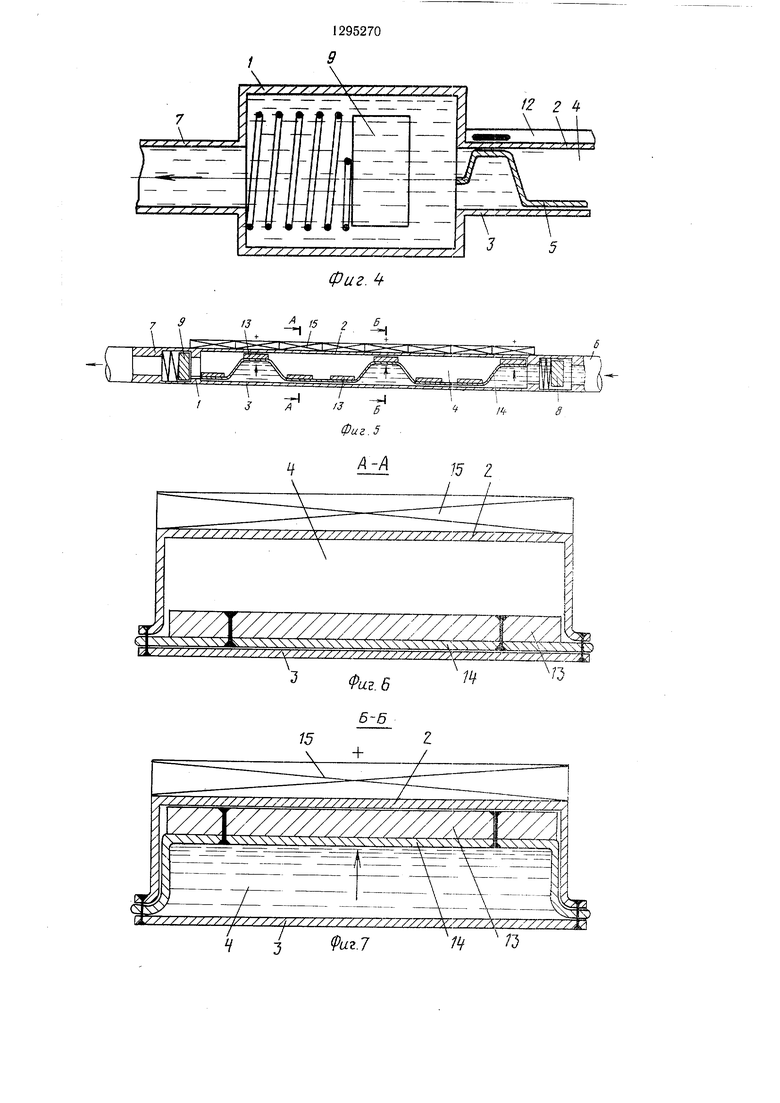
Второй вариант. Устройство снабжено ферромагнитной гибкой пластиной II, запрессованной внутрь эластичного гибкого элемента 5, выполненного в виде плоской пластины, натянутой на днище 3 в рабочей камере 4 с возможностью волнообразного перемещения в вертикальном направлении и вдоль оси корпуса 1 вместе с армирующей ее ферромагнитной пластиной 11 под действием бегущего магнитного поля, а привод 10 выполнен в виде установленного на крышке 2 вдоль корпуса 1 магнитопровода 12.
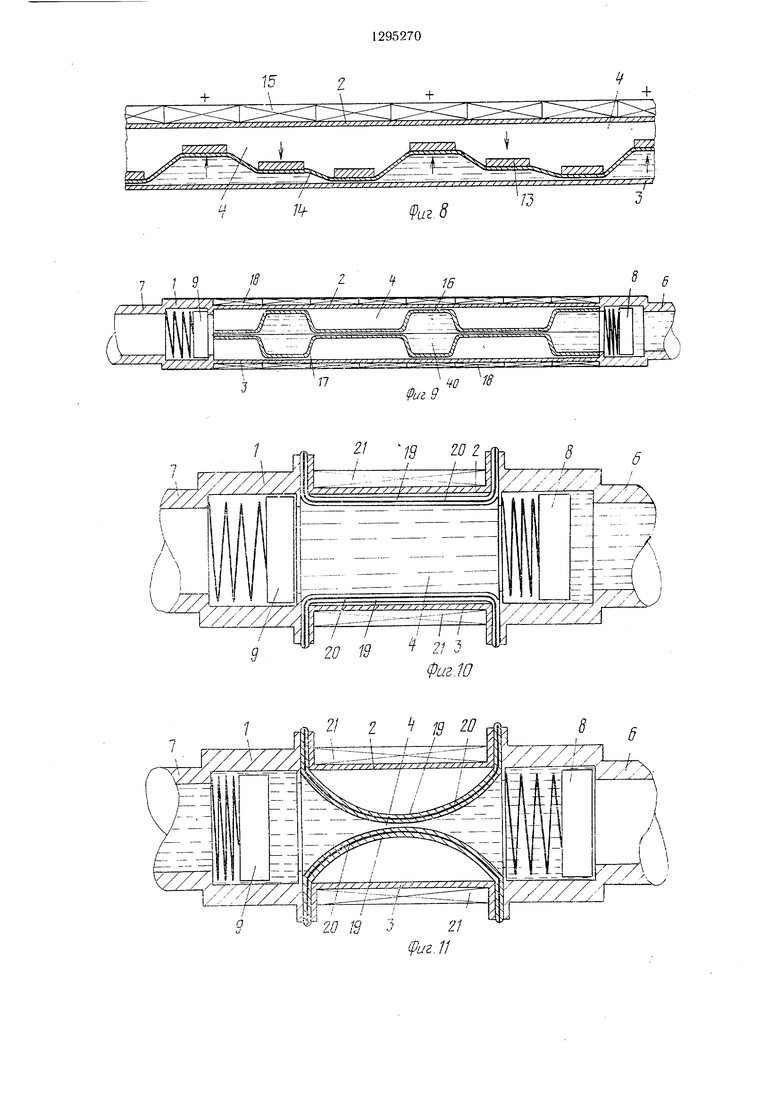
Третий вариант. Устройство снабжено ферромагнитными элемента.ми 3, закрепленными на эластичном гибком элементе 5 и расположенными со стороны рабочей камеры 4 вдоль корпуса 1, при этом эластичный гибкий элемент 5 выполнен в виде плоской пластины 14, натянутой на днище 3 в рабочей камере 4 под ферромагнитными элементами 13 с возможностью волнообразного.перемещения в вертикальном направлении и вдоль оси корпуса под действием бегущего магнитного поля, а привод 10 выполнен в виде электромагнитных катушек 15, установленных на крышке 2 вдоль корпуса 1.
Четвертый вариант. Эластичный гибкий элемент 5 выполнен в виде параллельных друг другу плоских ферромагнитных пластин 16 и 17, натянутых в центре рабочей камеры 4 вдоль корпуса 1 с возможностью независимого относительно друг друга волнообразного перемещения в вертикальном направлении и вдоль корпуса 1 крышки 2 и днища 3 под действием бегущего магнитного поля, а привод 10 выполнен в виде электромагнитных плоских катушек 18, установленных соосно друг другу на крышке 2 и днище 3 вдоль корпуса 1.
Пятый вариант. Эластичный гибкий элемент 5 выполнен в виде закрепленных друг над другом в крышке 2 и днище 3 плоских пластин 19 с запрессованными в них упругими армирующими ферромагнитными элементами 20, при этом армированные упругими ферромагнитными элементами 20 плоские пластины 19 установлены в рабочей камере 4 на внутренних поверхностях крышки 2 и днища 3 с возможностью независимого друг от друга возвратно-поступательного перемещения в вертикальном направлении под действием магнитного поля и упругих свойств армирующих элементов 20, а привод 10 выполнен в виде электромагнитных катушек 21, расположенных на крышке 2 и днище 3 снаружи рабочей камеры 4, образованной плоскими пластинами 19.
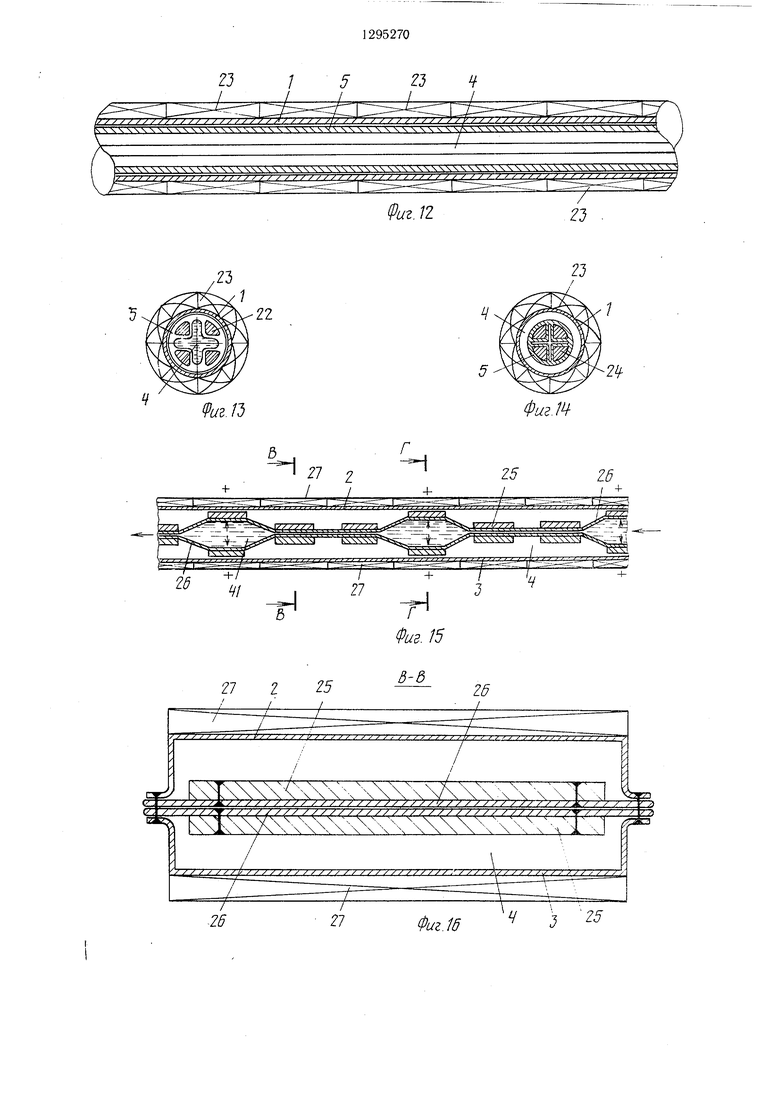
Шестой вариант. Устройство снабжено секторообразными ферромагнитными элементами 22, запрессованными внутри эластичного гибкого элемента 5, выполненного цилиндрическим и коаксиально установленного внутри корпуса 1, выполненного цилиндрическим, при этом рабочая камера 4 выполнена крестообразной и расположена внутри эластичного и гибкого элемента 5 между секторообразными ферро- магнитными элементами 22, а привод 10 выполнен в виде цилиндрических электромагнитных катушек 23, последовательно и коаксиально установленных на корпусе I . вдоль его оси.
Седьмой вариант. Устройство снабжено секторообразными ферромагнитными элементами 24, запрессованными внутрь эластичного гибкого элемента 5, выполненного цилиндрическим и коаксиально установленного внутри корпуса 1, выполнен- ного цилиндрическим, при этом рабочая камера 4 выполнена кольцевой и расположена между внутренней поверхностью корпуса и элстичным гибким элементом 5, а привод 10 выполнен в виде цилиндрических электромагнитных катушек 23, пос- ледовательно и коаксиально установленных на корпусе 1 вдоль его оси.
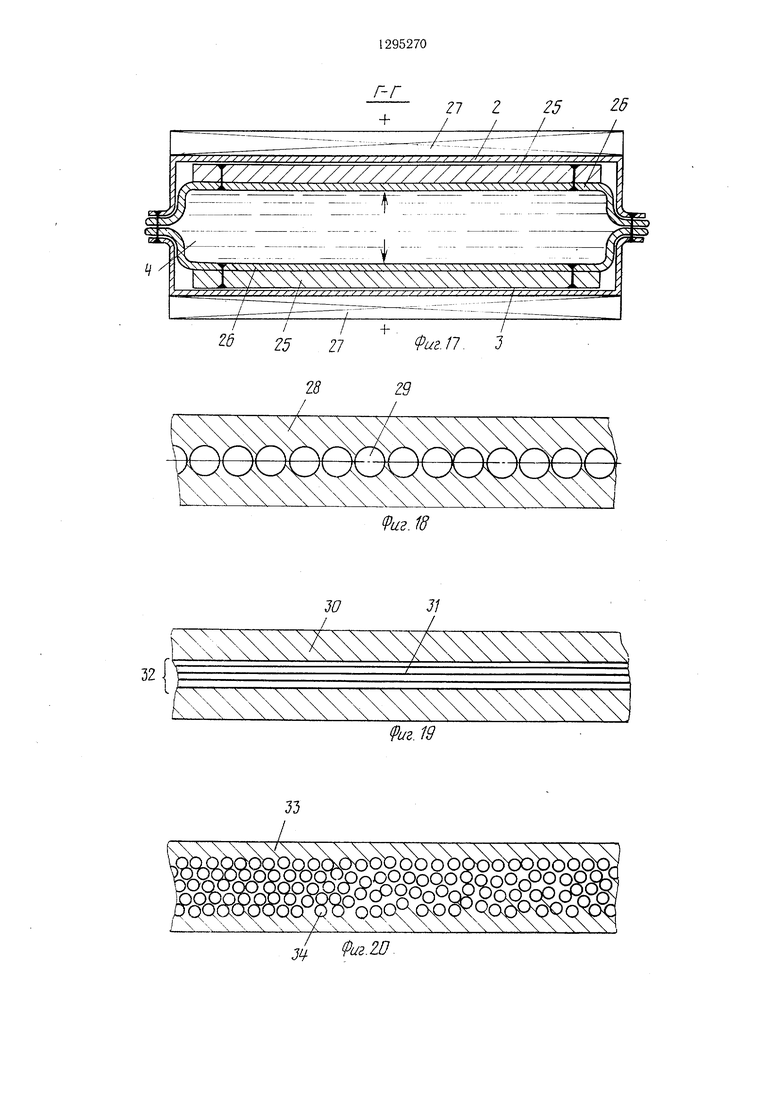
Восьмой вариант. Устройство снабжено ферромагнитными элементами 25, а эластичный гибкий элемент 5 выполнен в виде закрепленных по торцам между крышкой 2 и днищем 3 параллельных и притянутых друг к другу плоских пластин 26, на наружной поверхности которых соосно друг другу закреплены ферромагнитные элементы 25, при этом плоские пластины 26 ус- тановлены в центре рабочей камеры 4 по оси корпуса 1 с возможностью независимого друг от друга возвратно-поступательного перемещения в вертикальном направлении и волнообразного перемещения вдоль корпуса 1 под действием бегуще- го магнитного поля, а привод 10 выполнен в виде плоских электромагнитных ка- тущек 27, расположенных на крышке 2 и днище 3 вдоль корпуса 1 снаружи рабочей ка.меры 4 и соосно друг другу и ферромагнитным элементам 25.
Девятый вариант. Эластичный гибкий элемент 5 выполнен в виде плоской пластины 28 и снабжен ферромагнитными ша
5
0
s 0 5
0 5
5 0
0
риками 29, запрессованными соосно друг другу в пластину 28 вдоль ее оси.
Десятьш вариант. Эластичный гибкий элемент 5 выполнен в виде плоской пластины 30 и снабжен армирующими полосами 31 из упругого ферромагнитного материала, запрессованными в виде пакета 32 в пластину 30.
Одиннадцатый вариант. Эластичный гибкий элемент 5 выполнен в виде плоской пластины 33 и снабжен ферромагнитными шариками 34, хаотично запрессованными в пластину 33.
Двенадцатый вариант. Устройство снабжено по крайней мере одним поршнем 35, установленным с возможностью возвратно- поступательного перемещения в вертикальном направлении в рабочей камере 4 над эластичным гибким элементом 5, выполненным в виде плоской пластины 36, закрепленной по торцам между крышкой 2 и днищем 3 и натянутой по центру рабочей камеры 4 с возможностью перемещения по ее сечению под действием nopnj- ня 35 и упругих ее свойств, и по крайней мере одним штоком 37 из ферромагнитного материала, соединенным одним своим концом с верхней частью поршня 35, а второй его конец проходит через крышку 2 и помещен внутри, по крайней мере, одной электромагнитной катушки 38, в виде которой выполнен привЬд 10.
Устройство для отбора проб, дозирования и нагнетания сред работает следующим образом.
Для отбора проб устройство с помощью патрубка 6 подсоединяется или к технологическому трубопроводу или соответствующему аппарату, например, химическому реактору (не показаны). В связи с этим жидкость в патрубке 6 всегда находится или под некоторым избыточным внещним давлением или под атмосферным в случае поступления ее в патрубок 6(са.- мотеком).
Последовательное включение и выключение электромагнитных катушек 10 привода (фиг. 1) создает вдоль корпуса 1 со стороны его крышки 2 внутри рабочей камеры 4 бегущее электромагнитное поле, которое последовательно от катушки к катушке 10 притягивает отдельные участки гибкого элемента 5, выполненного в виде ферромагнитной пластины, например из резины с включениями диспергированных частиц окиси железа. Остальные же участки гибкого элемента 5 за счет их торцового крепления между крышкой 2 и днищем 3 остаются притянутыми к последнему. За счет этого создается волнообразное перемещение гибкого элемента 5 внутри камеры 4 и проталкивание ими доз жидкости, поступившей внутрь элемента 5 через обратный клапан 8 из патрубка 6. Отмеренные дозы 39 жидкости под давлением поступают через обратный клапан 9 и патрубок 7 в анализатор (не показан).
По второму варианту бегущее магнитное поле создается в камере 4 с помощью магнитопровода 12, а распрямление и изгибание эластичного элемента 5 обеспечивается упругостью ферромагнитной пластины 11.
По третьему варианту бегущее магнитное поле создается электромагнитными катушками 15, которые последовательно притягивают ферромагнитные элементы 13 и вместе с ними пластину 14. После отключения очередной катущки 15 пластина 14 распрямляется за счет своих упругих свойств.
По четвертому варианту последовательное включение и выключение катушек 18 попарно со стороны крышки 2 и днища 3 обеспечивает чередующееся размыкание и смыкание пластин 16 и 17 и транспортирование ими доз 40 жидкости.
По пятому варианту при включении катушек 2 пластины 19 вместе с ферромагнитными элементами 20 притягиваются к внутренним поверхностям крышки 2 и днища 3, засасывая жидкость из патрубка б через клапан 8 в камеру 4. При отключении кату1иек 21 пластины 19 под действием упругости элементов 20 изгибаются внутрь камеры 4, выталкивая дозу жидкости из нее через клапан 8 в патрубок 7. Циклическое включение и выключение катушек 21 обеспечивают непрерывную транспортировку отдельных доз жидкости из патрубка 6 и патрубок 7. Частота включения ка- тущек 21 определяет производительность устройства.
По шестому варианту бегущее магнитное поле, создаваемое последовательно включающимися и выключающимися катушками 23, заставляет ферромагнитные элементы 22 последовательно расходиться и сближаться внутри элемента 5. Радиальные перемещения элементов 22 последовательно вдоль корпуса 1 сжимают и разжимают в пульсируюпхем режи.ме камеру 4, последовательно транспортируя (проталкивая) дозы жидкости.
По седьмому варианту бегущее магнитное поле, создаваемое катушками 23, в пульсирующем режиме растягивает и сжимает с помощью ферромагьштных элементов 24 гибкий элемент 5, открывая и перекрывая им кольцевую камеру 4, проталкивая при этом дозы жидкости.
По восьмому варианту бегущее магнитное поле, создаваемое катушками 27, последовательно с помощью элементов 25 притягивает (растягивает) отдельные участки пластин 26. При выключении катушек 27 пластины 26 смыкаются и доза 41 жидкости, помещ,енная между ними, проталкивается дальше по длине корпуса 1.
По 12-му варианту последовательное включение и выключение (возможно применение переменного электрического тока) ка- тущек 38 приводит в вибрирующее движе- ние через шток 37 поршень 35, воздействующий на упругую пластину 36, всасывая и выталкивая при этом дозы жидкости из-под нее, осуществляя те.м са.мым ее транспортировку вдоль корпуса .
Преимуществами предлагае.мого устройства по сравнению с известными являются высокая точность отмеривания и дозирования проб; полная герметизация из-за использования магнитного привода; высокая синхронность работы отдельных участков эластичного элемента, зависящая от синхронности срабатывания электромагнитных катушек; высокая производительность и неограниченные возможности по ее увеличению нри блочном монтаже устройства из отдельных секций, возможность безопасного отбора и транспортирования проб агрессивных и ядовитых жидкостей; исключение попадания паров жидкостей в окружающую среду; значительная долговечность; отсутствие коррозии привода и его деталей; исключение контакта элементов гфивода с транспортируемой жидкостью; исключение загрязнения отбираемой на анализ жидкости посторонними примесями; гарантированность высокой точности анализа и объективность получаемых при
этом результатов.
Формула изобретения
I. Устройство для отбора проб, лозкрования и нагнетания сред, содержащее J-Q- ризонтальный корпус, эластичный ибкий элемент, размещенный в корпусе, патрубки ввода жидкости и вывода ее доз, подсоединенные к входу и выходу корпуса соответственно, обратные подпружиненные K. iaria- Hbi, размещенные между патрубками и корпусом, и привод, отличающееся те.м, что, с целью повышения точности дозирования, увеличения производительности и возможности нробоотбора агрессивных и ядовитых жид костей путем исключения контактирования их с окружающей средой и приводом, упрощения регулирования н обслуживания, эластичный гибкий элемент выполнен в виде плоской ферромагнитной пластины, установленной в нижней части корпуса с возмож0 ностью волнообразного nepeMeHJ,eHHH в кальном направлении и вдоль оси корпуса нод действием бегущего магнитного поля, а привод выполнен в виде электромагнитных катушек, установленных на крышке корпуса.
5 2. Устройство для отбора проб, дозирования и нагнетания сред, содержащее горизонтальный корпус, эластичный гибкий э. мент, размещенный в корпусе, патрубкм вво0
да жидкости и вывода ее доз, подсоединенные к входу и выходу корпуса соответственно, обратные подпружиненные клапаны, размещенные между патрубками и корпусом, и привод, отличающееся тем, что, с целью повышения представительности проб, эластичный гибкий элемент выполнен в виде параллельных друг другу плоских ферромагнитных пластин, установленных в центре корпуса с возможностью независимого относительно друг друга волнообразного перемещения в вертикальном направлении вдоль корпуса под действием бегущего поля, а привод выполнен в виде электромагнитных плоских катущек, установленных соосно друг другу в верхней и нижней частях корпуса. 3. Устройство для отбора проб, дозирования и нагнетания сред, содержащее горизонтальный корпус, эластичный гибкий элемент, размещенный в корпусе, патрубки ввода жидкости и вывода ее доз, подсоединенные к входу и выходу корпуса соответственно, обратные подпружиненные клапаны, размещенные между патрубками и корпусом и привод, отличающееся тем, что, с целью повышения представительности проб, устройство снабжено секторообразными ферромагнитными элементами, запрессованными внутри эластичного гибкого элемента, выполненного цилиндрическим и коаксиально установленного внутри корпуса, выполненного
цилиндрическим, при этом рабочая камера выполнена крестообразной и расположена внутри эластичного гибкого элемента между секторообразными ферромагнитными элементами, а привод выполнен в виде цилиндрических электромагнитных катущек, последовательно и коаксиально установленных на корпусе вдоль его оси.
4. Устройство для отбора проб, дозирования и нагнетания сред, содержащее горизонтальный корпус, эластичный гибкий элемент, размещенный в корпусе, патрубки ввода жидкости и вывода ее доз, подсоединенные к входу и выходу корпуса соответственно, обратные подпружиненные клапаны, размещенные между патрубками и корпусом, и npiiBOH., отличающееся тем, что, с целью повышения представительности проб, оно снабжено секторообразными ферромагнитными элементами, запрессованными внутри эластичного гибкого элемента, выполненного цилиндрическим и коаксиально установленного внутри корпуса, выполненного цилиндрическим, при этом рабочая камера выполнена кольцевой и расположена между внутренней поверхностью корпуса и эластичным гибким элементом, а привод выполнен в виде цилиндрических электромагнитных катущек, последовательно и коаксиально установленных на корпусе вдоль его оси.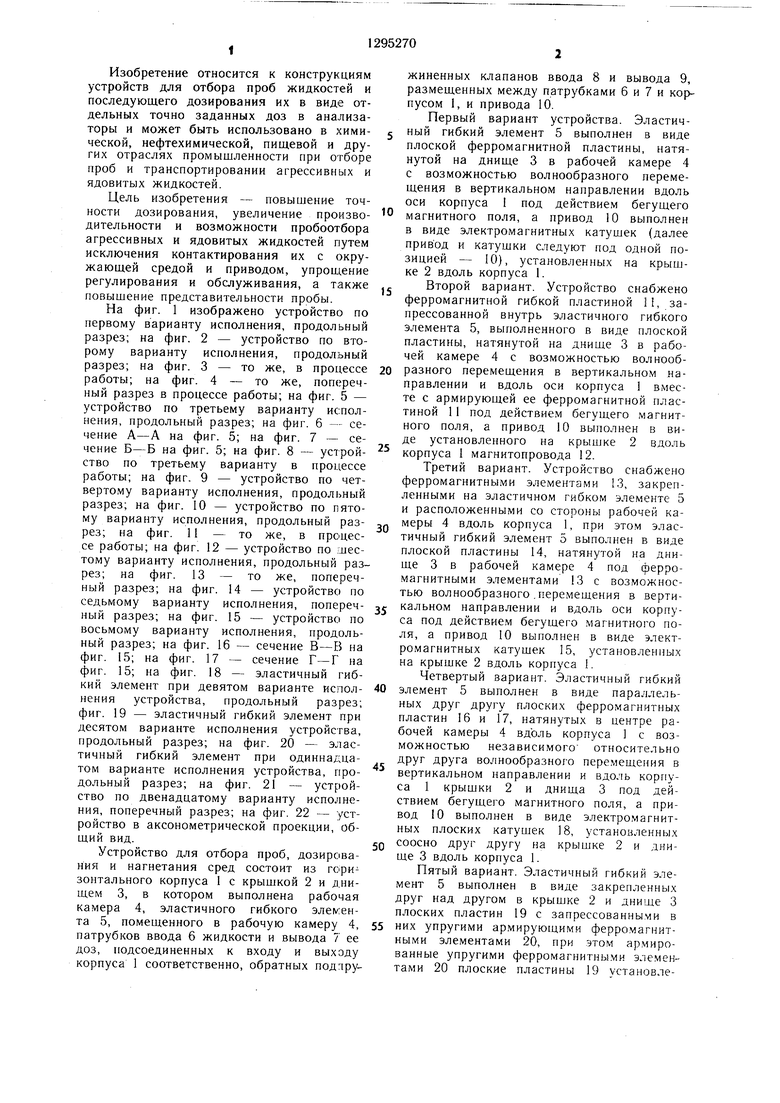
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отбора проб жидкости | 1984 |
|
SU1268997A1 |
| Сушилка для сыпучих материалов | 1989 |
|
SU1617276A1 |
| Смеситель | 1986 |
|
SU1430096A1 |
| Смеситель | 1984 |
|
SU1194476A1 |
| Насос перистальтического типа | 1986 |
|
SU1408104A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА НАДОЕВ МОЛОКА | 2006 |
|
RU2327343C1 |
| ПЕРИСТАЛЬТИЧЕСКИЙ ДОЗАТОР ЖИДКОСТИ | 1990 |
|
RU2011172C1 |
| СПОСОБ РАБОТЫ МАГНИТОЖИДКОСТНОГО НАСОСА | 1996 |
|
RU2120566C1 |
| Насос перистальтического типа | 1986 |
|
SU1408106A1 |
| УСТРОЙСТВО ДЛЯ ГАЛЬВАНОХИМИЧЕСКОЙ ОЧИСТКИ СТОЧНЫХ ВОД | 2002 |
|
RU2323162C2 |
Устройство относится к пробоотборной технике и может найти широкое распространение в химической, нефтехимической и пищевой промышленностях для отбора и дозирования проб агрессивных и ядовитых жидкостей. Целью изобретения является повышение точности дозирования, увеличение производительности и возможности пробо- отбора агрессивных и ядовитых жидкостей путем исключения контактирования их с окружаюш,ей средой и приводом, упрощение регулирования и обслуживания, а также повышение представительности пробы. Особенность изобретения заключается в 12 вариантах исполнения устройства с электромагнитным приводом для создания в эластичном гибком элементе эффекта бегущей волны под действием бегущего магнитного поля. Устройство для отбора проб жидкости, содержащее горизонтальный корпус с крышкой и днищем, в котором выполнена рабочая камера, эластичный гибкий элемент, помещенный в рабочую камеру, патрубки ввода жидкости и вывода ее доз, подсоединенные к входу и выходу корпуса соответственно, обратные подпружиненные клапаны, размещенные между патрубками и корпусом, и привод, снабжено ферромагнитными элементами, закрепленными на эластичном гибком элементе и расположенными со стороны рабочей камеры вдоль корпуса. Г1ри этом эластичный гибкий элемент выполнен в виде плоской пластины, надетой, на днище в рабочей камере под ферромагнитными элементами с возможностью волнообразного перемещения в вертикальном направлении и вдоль оси корпуса под действием бегущего магнитного поля, а привод выполнен в виде электромагнитных катушек, установленных на крышке вдоль корпуса. 4 с.п. ф-лы, 22 ил. & (Л N3 СО 01 го 
/2
/
/ / /
Фиг.г
/ V
J f t
N II I
////
Фиг.
15 2
.4
VXXXVXXXXXXXxvvxXXXXXi vXXX
////////////// /////////////////////f //// ///// / /
Ь Й..6
g-5
/J2
л±-X
а
aL
X XXXX XN X х X ХХХХХХХ.ХХХ ТчX ХХлГХХХЗКХХ ХХ
14 Vj
(5
+
7 / 9
11
W
Фиг 9
чо 18
2/ / го г
21 г f 19 20
. / / /
6
(Риг.11
Фиг. 12
иг. /J
2J
26
Фиг. 15
26
Фиг.16
V J 25
Z6
г-г
fe/7. J
30
иг. W
J/ /
(риг. 19
) r LJ V.
.v..W°
J4
.2Z7
Фиг. 22
| СИСТЕМА СИМПЛЕКСНОЙ РАДИОСВЯЗИ С АБОНЕНТАМИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1991 |
|
RU2025900C1 |
| кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| УСТРОЙСТВО ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ДЕТАЛЕЙ ВРАЩЕНИЯ | 1998 |
|
RU2146595C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
