1 1
Изобретение относится к вычислительной технике и может найти применение при разработке автоматизирован ных систем управления технологическими процессами.
Целью изобретения является повышение эффективности технологического процесса.
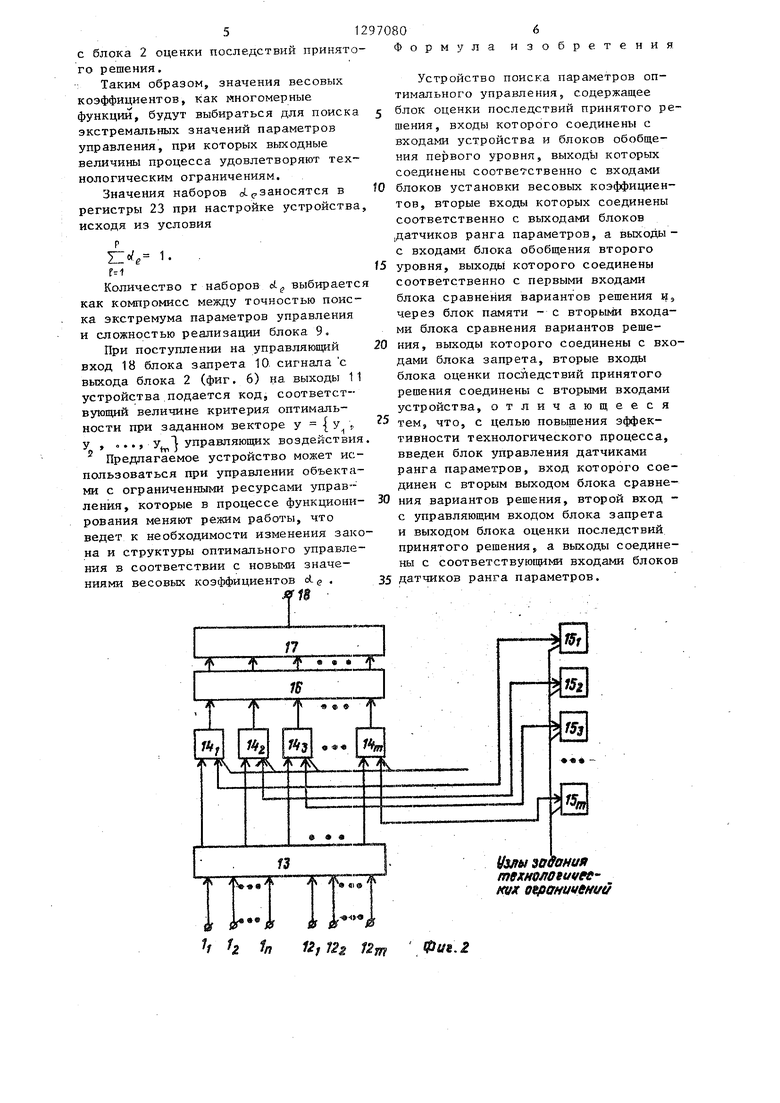
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - функциональная схема блока оценки послед ствий принятого решения; на фиг. 3 - функциональная схема блока обобщения первого уровня; на фиг. 4 - функциональная схема блока памятиJ на фиг. 5 - функциональная схема блока сравнения вариантов решений, на фиг. 6 - функциональная схема, блока запрета, на фиг. 7 - функциональная схема объекта управления для рассма риваемого примера на фиг. 8 - функциональная схема блока сравнения вариантов решений для рассматривемого примера.
На чертежах приняты обозначения: входы 1;,1 устройства, блок 2 оценки последствий принятого решения, блоки 3/-3 обобщения первого уровня
, блоки установки весовых
коэффициентов, блоки 5,-5ц датчиков ранга параметров, блок 6 обобщения второго уровня, блок 7 памяти, блок
8сравнения вариантов решений, блок
9управления датчиками ранга парамет ров, блок 10 запрета, выходы 11,-11 устройства, вторые входы устройства, блок 13 математической модели, блок 14 сравнения, блоки 15 задания технологических ограничений, девшфратор 16, элемент ИЛИ 17, выход блока 18, первый вход 19, элемент И-НЕ 20, распределитель 21, элементы И 22, регистры 23, элементы ИЛИ 24, выходы 25 блока, входы 26, первый регистр 27, элемент 28 сравнения, элементы И 29, второй регистр 30, вы ходы 31, элемент 32 сравнения, элементы К ЗЗэ элемент НЕ 34, выходы
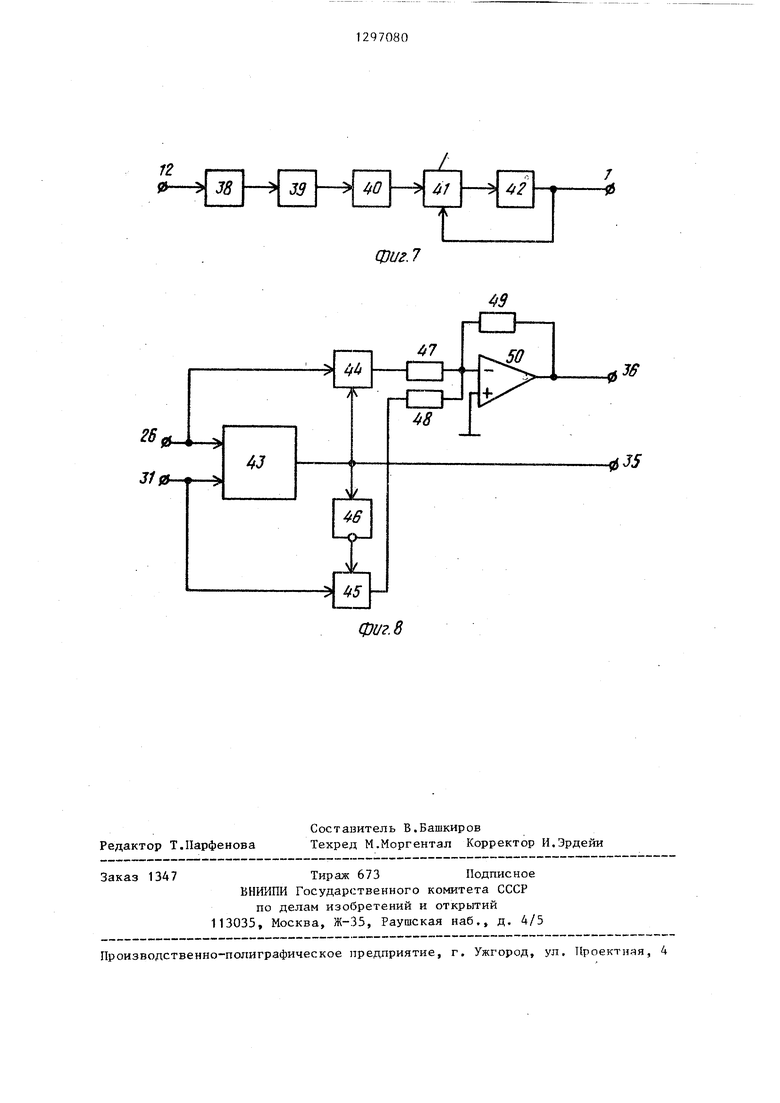
35 и 36, элементы И 37, первый интег ратор 38, квадратор 39, усилитель 40 компаратор 41, второй интегратор 42, компаратор 43, первый 44 и второй 45 ключи, элемент НЕ 46, регистры 47-49, усилитель 50.
Устройство поиска параметров оптимального управления работает следующим образом.
Исходная ситуация в вид,е сигналов .., ..., х, характеризуюпщх изменеX
970802
ния выходных параметров технологического процесса, с входа 1 устройства поступают на первые входы блока 2 оценки последствий принятого ре, шения и на входы блоков 3 -3 обоб- Jл
щения первого уровня. При этом в блоке 2 оценки последствий принятого
решения физические величины х
1 х параметров оценки, измеренные на
fO предьщущем шаге поиска экстремума параметра -управления, подаются соответственно на первые входы 1,-1
«г f1
блока 13 математической модели технологического процесса. Одновременно
f5 на вторые входы 12 -12 блока 13 ма1 м1
тематической модели подаются физические величины у , ..., у вектора у от вторых входов 12 устройства.
Величины вектора У (у , ...,у 20 соответствуют найденным значениям m параметров управления на шаге t. .
Блок 13 прогнозирует изменения выходных параметров технологического процесса при предполагаемых значе- 25 ниях параметров управления , ...,
у;„ . С выхода блока 13 значения ; , ..., х поступают на первые
X
1
ti
входы блоков сравнения 14, ...,14, на вторые входы которых поступают
30 напряжения с Е:ЫХОДОВ блоков задания технологических ограничений 15,..., соответствующие ограничениям на выходные параметры технологического процесса.
j . Если значение выходного параметра
ограничениям
JMMH
X .
X .
(1)
то с вых ода блока сравнения 14 поступает на вход дешифратора 16 единичный сигнал. Если условие (1) не выполняется j то на выходе блока 14- 45 нулевой уровень сигнала.
Если изменения выходных параметров технологического процесса для заданных значений параметра управле- 5Q ния не выходят за пределы технологических ограничений, то на выходе 18 элемента ИЛИ 17 единичный сигнал, т.е. .блок 2 оценки последствий принятого решения характеризует величи- ны параметров управления у , ...,у как выбранные верно устройством поиска экстремума параметров управления,, В противном случае, если изменения вь{ходных параметров отклонены
3
выходе
18 нулевой
от нормы, то на потенциал.
Одновременно с подачей сигналов X ,, ., ., х на выходы 1 блока 2 оценки последствий принятого решения данные сигналы подаются на входы блоков 3 -3f, обобщения первого уровня, в которых вырабатываются сигналы оценок макроситуаций по заданным критериям У; .
В блоках установки весовых коэффициентов 4,-4п численные оценки макроситуаций умножаются на весовые коэффициенты, величины которых подаются на вторые входы блоков с выходов блоков 5,-5 датчиков ранга параметров. Причем в i-м блоке установки весовых коэффициентов 4j формируется сумма d; Fj.
На входы блока 6 обобщения второго уровня поступают оценки макроситуаций со своими весовыми коэффициентами. Блок 6 обобщения второго уровня по заданному критерию F оценивает вариант решения, соответст1
§
вующий данно набору оценок макроситуаций. Величина оценки варианта решения данного такта запоминается в блоке 7 памяти, а затем сравнивается с оценкой на предьщущем такте F блоком 8 сравнения вариантов решения.
Величина критерия F снимается с выходов блок-а 6 в виде двоичного кода, который в общем случае подается- на входы блока памяти 7 и записьшает ся в регистр 27. Если код регистра 27 больше кода регистра 30, то элемент 28 сравнения разрешает запись .кода регистра 27 в регистр 30 на дующем такте. В блоке 8 сравнения вариантов решений элемент 32 сравнения сравнивает два кода, подаваемы на первую 26 и вторую 31 группы входов. Если код, подаваемый на входы Z6, меньше кода на входах 31, то на выходе элемента сравнения 32 не будет потенциала, а на выходе 36 блока 8 будет потенциал. Б работу включается блок 9 управления датчиками ранга параметров.
Блок сравнения 8 работает следующим образом (фиг. 8).
На первый вход 26 поступает аналоговая величина F , (потенциал напряжения), на второй вход 31 величина FJ., , компаратор 43 при условии, если F,- F- , имеет на выходе нулевой потенциал, а если F; , F, ,
10
2970804
имеет на выходе единичный потенциал. Соответственно на втором выходе 35 блока 8 ноль, либо единица. Потенциалом с выхода компаратора 43 либо элемента НЕ 46 открываются соответствующие аналоговые ключи 38 или 39, напряжение с выходов которых подается на входы аналогового элемента, собранного на регистрах 47-49 и усилителе 50 постоянного тока. Причем, на первом выходе 36 блока 8 присутствует максимальная величина 1 рите- рия F.
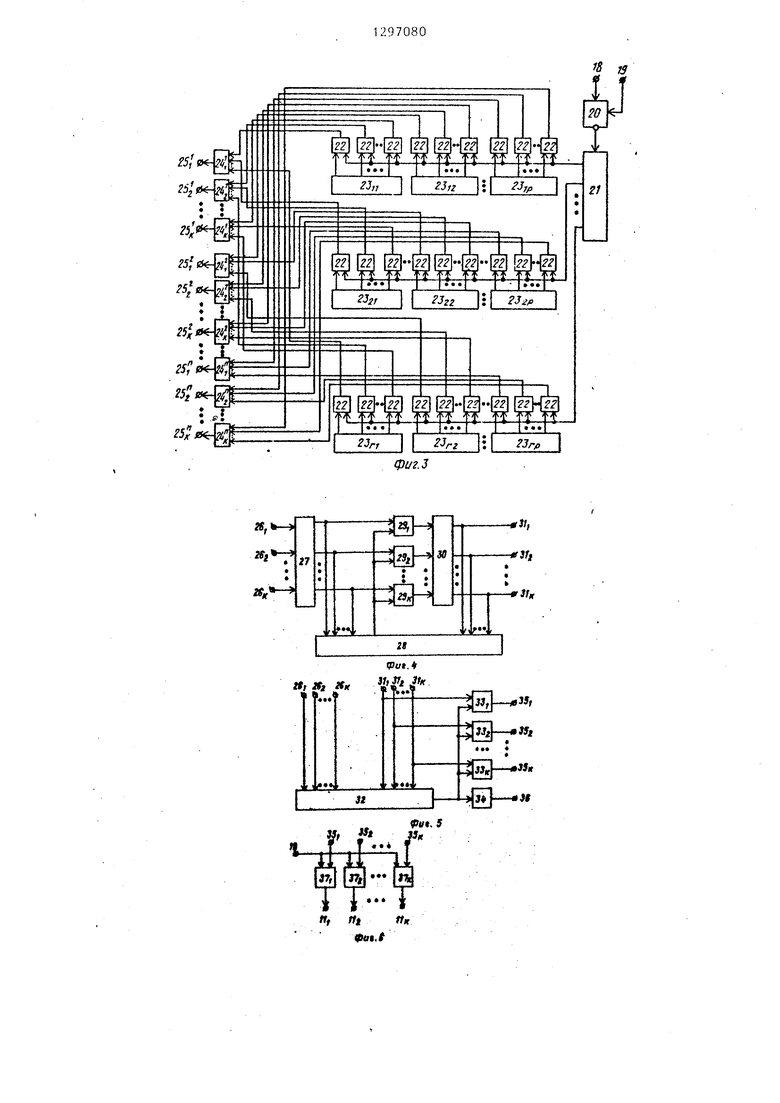
Если на втором выходе блока 8 сравнения вариантов решения нулевой потенциал, то включается в работу блок 9 управления датчиками ранга параметров, который работает следующим образом (фиг. 3).
В регистрах 23 -23гр хранятся наборов значений нормированных величин весовых коэффициентов. Если на первый 19 либо на второй 18 входы блока 9 подан нулевой потенциал, то на выходе элемента И-НЕ 20 будет единичный потенциал и распределитель 21 включается в работу, т.е. если на i-1 такте работы устройства поиска экстремума параметра управления потенциал бып на j-ом выходе распределителя 21 и на i-oM такте работы
J5
20
25
30
35
40
-- х
получена величина FJ F., , то распределитель на (i+1)-oM такте переключится и потенциал будет на (j+1)- ом выходе распределителя 21, а значения весовых коэффициентов, хранящиеся в регистрах 23 ; „-23;, р, через
и
Г) / « / (1
на входы блоков 5 -5
) -7
.14-fP
соответствующие элементы И 22 элементы ШШ 24.-24 будут поданы
45
га параметров код величины cij регистре 23 , элементы И Ш1И
„ датчиков ран- Причем k-разрядный t , хранящейся в будет подан через
24, -24, 25 блока
с
22
f
9 будет подан на входы
на входы элементов и через выходы
0
соответствующего блока 5р. В блоках дискретные величины кодов нормированных весовых коэффициентов преобразуются в аналоговые величины. Если на (i+l)-oM такте величина F,-, то распределитель 21 ка 9
, .„ распределитель вновь переключится, и на (i + + 2)ом такте сигнал будет на (j 2)-м выходе распределителя 15.
Аналогично описанному происходит запуск распределителя 21 в блоке 9 управления датчиками ранга параметров при появлении нулевого сигнала
с блока 2 оценки последствий принятого решения.
: Таким образом, значения весовых коэффициентов, как многомерные функции, будут выбираться для поиска экстремальных значений параметров управления, при которых выходные величины процесса удовлетворяют технологическим ограничениям.
Значения наборов oLpзаносятся в регистры 23 при настройке устройства исходя из условия
г
наборов ct-, выбирается
как компромисс между точностью поиска экстремума параметров управления и сложностью реализации блока 9.
При поступлении на управляющий вход 18 блока запрета 10 сигнала с выхода блока 2 (фиг. 6) на выходы 11 устройства подается код, соответствующий величине критерия оптимальности при заданном векторе у { У у , о.., у 1 управляющих воздействия. Предпагаемое устройство может использоваться при управлении объектами с ограниченными ресурсами управления, которые в процессе функционирования меняют режим работы, что ведет к необходимости изменения закона и структуры оптимального управления в соответствии с новыми значениями весовых коэффициентов d g
Формула изобретения
Устройство поиска параметров оптимального управления, содержащее
блок оценки последствий принятого решения, входы которого соединены с входами устройства и блоков обобщения первого уровня, выходы которых соединены соответственно с входами
блоков установки весовых коэффициентов, вторые входы которых соединены соответственно с выходами блоков .датчиков ранга параметров, а выходы - с входами блока обобщения второго
уровня, выходы которого соединены соответственно с первыми входами блока сравнения вариантов решения и, через блок пг1мяти - с вторыми входами блока сравнения вариантов решения, выходы которого соединены с входами блока запрета, вторые входы блока оценки последствий принятого решения соединены с вторыми входами устройства, отличающееся
тем, что, с целью повьшения эффективности технологического процесса, введен блок управления датчиками ранга параметров, вход которого соединен с вторым выходом блока сравнения вариантов решения, второй вход - с управляющим входом блока запрета и выходом блока оценки последствий принятого решения, а выходы соединены с cooтвeтcтвyюш йI входами блоков
датчиков ранга параметров.
ония
mfxHOffoet/ifK Mfjf о оничений
jk
f h In Пш 12щ Фиъ.1
; 1 гзгр I
фиг. 3
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора оптимальных решений | 1980 |
|
SU926671A2 |
| Устройство для выбора оптимальных решений | 1979 |
|
SU922782A2 |
| Устройство для выбора оптимальных решений | 1980 |
|
SU962988A2 |
| Устройство для выбора оптимальных решений | 1978 |
|
SU767778A2 |
| Устройство для принятия решений | 1978 |
|
SU706850A1 |
| Устройство для выбора оптимальных решений | 1975 |
|
SU549815A1 |
| Устройство для выбора оптимальных решений | 1980 |
|
SU920753A2 |
| Устройство для принятия решений в экспертных системах | 1990 |
|
SU1770961A1 |
| ВСЕСОЮЗНАЯ Л. А. Шойхет, А. С. Белима, А. Г. Мелик-Аскаров, }j^,..^,..,.. ^^^,,,,.,.^^В. М. Гаврилюк, Б. И. Семеняк и А. А. Казьмина р^"—"!Н1'~1':ХН'''-;5\?{ЛЯ | 1970 |
|
SU287550A1 |
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ СВЕРТОЧНОГО КОДА | 1991 |
|
RU2015621C1 |
Изобретение относится к вычислительной тегхнике и может быть использовано при разработке автоматизированных систем управления технологическими процессами. Цель изобретения - повышение эффективности технологического процесса. Устройство поиска параметров оптимального j.i- равления содержит входы 1, блок 2 оценки последствий принятого решения, блоки 3 обобщения первого уровня, блоки 4 установки весовых коэф- фиlJ eнтoв, блоки 5 датчиков ранга параметров, блок 6 обобщения второго уровня, блок 7 памяти, блок 8 сравнения вариантов решений, блок 9 управления датчиками ранга параметров, блок 10 запрета, выходы 11, вторые входы 12. 8 ил. с & сл го со vl о оо о cffuf.i
Редактор Т.Парфенова
Составитель В.Башкиров
Техред М.Моргентал Корректор И.Эрдейи
Заказ 1347Тираж 673 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.7
| Устройство для выбора оптимальных решений | 1975 |
|
SU549815A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
