Изобретение относится к геофизике, а именно к исследованию нефтяных и газовых скважин с помощью приборов, спускаемых на кабеле.
Целью изобретения является повьше- ние точности и достоверности измерения геофизических параметров.
На чертеже приведена принципиальная схема реализации способа.
Исходя из теоремы Котельникова и опираясь на результаты исследований Новицкого П. В., можно получить выражение
N. g-,(1)
где W| - число каналов (измерений); погрешность измерения; энергетический порог чувствительности;
граничное значение частоты спектра сигнала; потребляемая от ;источника информации мощность. Это вьфажение по существу являет;5)
If
с
F - Р прибора. При таком согласовании погрешность измерения не будет зависеть от скорости движения прибора. Из выражения (4) получаем у2 - Ic2FCh
гг PV
В настоящее время при исследовании скважин обычно частота синхронизации является величиной постоянной, т.е.
fO Fj const5 а скорость изменяется, т.е. . Поэтому и погрешность изменяется обратно пропорционально изменению скорости. Если же частота синхронизации является функцией скорости
15 движения прибора, т.е. корректируется в соответствии с выражением (5), то точность измерения повышается за счет согласования процессов движения с процессами измерения и передачи данных и обеспечения независимости от скорости движения.
Из сказанного следует, что выражение (4) является тем аналитическим вьфажением, в соответствии с которым
20
ся математической моделью многоканаль- должно осуществляться управление (из- ного процесса измерения (преобразова- менение) частотой синхронизации процессами измерения и передачи данных при каротаже. Такое управление обеспечивает адаптацию режимов измерения 30 и передачи данных к процессу движения прибора. Результатом этого, как
ния) при временном уплотнении каналов.
Процесс каротажа является совокупностью по крайней мере двух процессов - процесса измерения и процесса движения. Поэтому можно получить формулу, аналогичную выражению (1) и определяющую число каналов измерения в зависимости от скорости движения прибора
ТГ V,
(2)
и - Ил - ,,г )
г V
где F - частота синхронизации коммутаторов скважинного при- бора и наземной аппаратуры; - длина шага квантования; V - скорость движения прибора. Очевидно, согласование рассматриваемых процессов возможно при условии
40
п
показано, является повышение точности измерения.
Реализация способа может быть ос.у- 35 ществлена с помощью каротажной станции, оснащенной компьютезированной каротажной лабораторией ЛК-01. Эта лаборатория оснащена блоком питания скважинной аппаратуры, которьй управляется от микроэвм. Лаборатория работает с комплексными скважинными приборами типа К 1А-723. Эти приборы снабжены элементами, контролирующими скорость движения прибора. Сигнал от скважинного прибора, характеризующий движение прибора, поступает в микро- ЭВМ, от которой поступает сигнал управления на блок питания для изменения частоты питания скважинного при- 50 бора. Частота этого блока питания является частотой синхронизации коммутаторов (скважинного и наземного) многоканальной измерительной и передающей аппаратуры. В этих лабораториях регистрация данных осуществляется с помощью бумажного носителя, управление приводом которого весьма просто осуществляется напряжением с
45
N,
N,
.(3)
Отсюда не трудно получить выражение
тг ,11 с . 2FCh
(4)
Очевидно, что частота синхронизации, согласующая между собой процессы измерения и передачи данных, линейно .зависи ма от скорости движения. Одновременно оно показывает, каким образом необходимо согласовать частоту синхронизации с процессом движения
;5)
прибора. При таком согласовании погрешность измерения не будет зависеть от скорости движения прибора. Из выражения (4) получаем у2 - Ic2FCh
гг PV
В настоящее время при исследовании скважин обычно частота синхронизации является величиной постоянной, т.е.
Fj const5 а скорость изменяется, т.е. . Поэтому и погрешность изменяется обратно пропорционально изменению скорости. Если же частота синхронизации является функцией скорости
движения прибора, т.е. корректируется в соответствии с выражением (5), то точность измерения повышается за счет согласования процессов движения с процессами измерения и передачи данных и обеспечения независимости от скорости движения.
Из сказанного следует, что выражение (4) является тем аналитическим вьфажением, в соответствии с которым
должно осуществляться управление (из- менение) частотой синхронизации процессами измерения и передачи данных при каротаже. Такое управление обеспечивает адаптацию режимов измерения и передачи данных к процессу движения прибора. Результатом этого, как
показано, является повышение точности измерения.
Реализация способа может быть ос.у- ществлена с помощью каротажной станции, оснащенной компьютезированной каротажной лабораторией ЛК-01. Эта лаборатория оснащена блоком питания скважинной аппаратуры, которьй управляется от микроэвм. Лаборатория работает с комплексными скважинными приборами типа К 1А-723. Эти приборы снабжены элементами, контролирующими скорость движения прибора. Сигнал от скважинного прибора, характеризующий движение прибора, поступает в микро- ЭВМ, от которой поступает сигнал управления на блок питания для изменения частоты питания скважинного при- бора. Частота этого блока питания является частотой синхронизации коммутаторов (скважинного и наземного) многоканальной измерительной и передающей аппаратуры. В этих лабораториях регистрация данных осуществляется с помощью бумажного носителя, управление приводом которого весьма просто осуществляется напряжением с
изменяющейся частотой, поступающим от указанного блока питания
Реализацию способа, -.е, режима управления частотой синхронизации, можно продемонстрировать на примере системы, функциональная схема которой приведена на чертеже. Приведенная схема является функциональной схемой комплексного прибора К 1А-723 разработанного на основе агрегатиро- ванной системы скважинных приборов (АСКП).
На чертеже показаны скважинный прибор 1, включающий фильтр 2 разделения питающего напряжения 400 Гц от информационных импульсов, формируемых преобразователем 3 напряжение - длительность временного интервала или широтно-импульсным модулятором (ВШМ), на который через коммутатор 4 поступают информационные сигналы с датчиков 5. Питание электронных элементов и узлов .скважинного прибора осуществляется от вторичного источника 6. При этом среди указанных дат- 25 на напряжения, пропорциональная ул
чиков находится и датчик натяжения (силы), который контролирует силу натяжения между приборами и нижним концом кабеля. В качестве датчика натяжения используется тензометри- ческий преобразователь давления Д-100
Скважинный прибор через кабель и направляющий ролик 7 соединен с наземной панелью 8, включающей в свой состав фильтр 9 разделения частоты 400 Гц (напряжение питания скважинного прибора), формирователь 10 импульсов синхронизации, счетчик 11 числа канало;в, дешифраторы (мультиплексоры) 12 и 13, формирователь 14 дли- тельности временного (информационного) интервала на основе триггера, источник 15 питания -скважинной аппаратуры УГ-1, выпускае1Ф1й серийно, преобразователь 16 временной интервал- напряжение и исполнительный механизм (микродвигатель) 17. Причем для реализации способа вновь введенными эле- ментами в функциональную схему комплексного прибора К 1А-723 и наземной панели соответственно введены датчик натяжения, дешифратор (мультиплексор) 12, преобразователь 16 и исполнительный механизм 17.
Реализация способа осуществляется в процессе работы всей системы следующим образом. При изменении скорости движения прибора 1 информация об
этом изменении в форме напряжения, пропорционального ускорению прибора, с датчика натяжения через коммутатор 4 поступает на ШИМ 3. Далее утке в
форме последовательности длительностей временных интервалов через фильтры 2 и 9 информация поступает в наземную часть. Число, временных интервалов зависит от числа датчиков в
приборе, Дпя выделения каждого цикла опроса датчиков из скважинного прибора поступают также импульсы-маркеры, с помощью которых осуществляется выделение каналов, соответствующих
конкретным датчикам. Эта процедура осуществляется с помощью формирователя 10 импульсов синхронизации, счет- чика 8, мультиплексоров 12, 13 и формирователя-триггера 14, Геофизичес -кая информация с дешифратора-мультиплексора 13 поступает на регистрацию, а информация о натяжении кабеля с дешифратора 12 поступает на преобразователь 16 время - напряжение. Величи30
40
корению прибора с преобразователя 16 поступает на электродвигатель 17. Так как электродвигатель является интегрирующим звеном, то число оборотов его пропорционально скорости движения приборов. Вращая потенциометр, электродвигатель тем самым изменяет частоту питающего напряжения УГ-1 в соответствии с приведенными j формулами.
Формула изобретения
Способ исследования скважин, вклю- чакнций измерение геофизических параметров при движении скважинного прибора и параметров, характеризующих движение прибора, передачу измеренной информации по кабелю на поверхность и ее регистрацию, а также синхронизацию процесса регистрации информации с процессом движения скважинного прибора, отличающий- с я тем, что, с целью повышения точности и достоверности измерения геофизических параметров, изменяют частоту синхронизации процессов измере- ния параметров, передачи и регистрации информации в зависимости от ско- рости движения скважинного прибора согласно формуле
р с- 2F.C.h
51298361
Fp - частота синхронизации;
V - скорость движения прибора;у - погрешность измере ния;5
h - шаг квантования;
i
I
к
Tfr 7R 1Г
LTz:
П
Л
Редактор А, Ворович
Составитель В, Сидоров Техред Л.Сердюкова
Заказ 870/32 Тираж 533
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ширина частотного спектра измеряемого сигнала;
мощность, потребляемая от источника информации;
энергетический порог чувствительности ,
Корректор А. Обручар
Подписное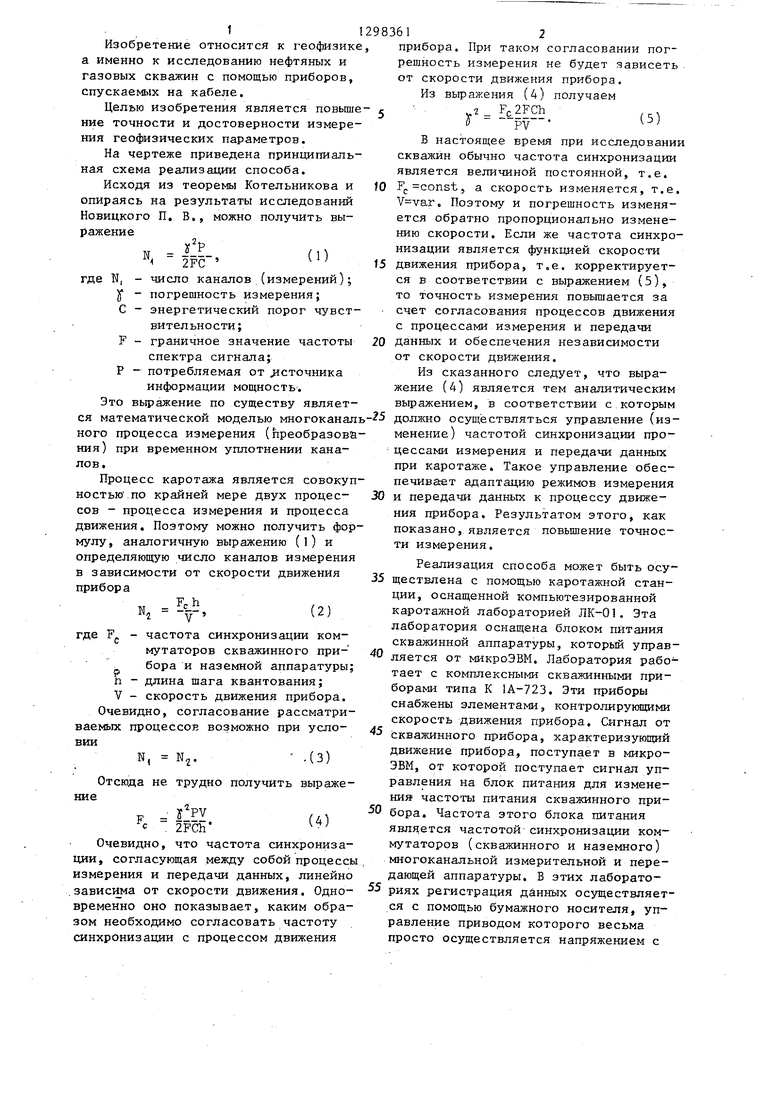

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ передачи информации от скважинной к наземной части геофизической аппаратуры | 1983 |
|
SU1134708A1 |
| Каротажная станция | 1981 |
|
SU1035548A1 |
| Устройство для акустического каротажа скважин | 1981 |
|
SU960695A1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РАЗРАБОТКИ НЕФТЯНЫХ МЕСТОРОЖДЕНИЙ | 1993 |
|
RU2077735C1 |
| Комплексно-комбинированный прибор для каротажа скважин | 1980 |
|
SU911411A1 |
| СКВАЖИННЫЙ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2009 |
|
RU2425213C1 |
| Аппаратура для каротажа скважин | 1981 |
|
SU947805A1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2533105C1 |
| Устройство передачи параметров при геофизических исследованиях скважин | 1984 |
|
SU1177467A1 |
| Ультразвуковой импульсный способ исследования буровых скважин и устройство для его осуществления | 1974 |
|
SU603933A1 |
Изобретение касается геофизических исследований нефтяных и газовых скважин с помощью приборов, спускаемых на кабеле. Цель - повышение точности и достоверности измерения геофизических параметров. В скважину опускается скважинный прибор (СП), соединенный через кабель и направляющий ролик с наземной панелью. При движении СП измеряются геофизические параметры и параметры, характеризующие движение СП, и передак1тся по кабелю на поверхность для регистрации. При этом процессы движения СП передачи и регистрации информации осуществляются синхронно. Для согласования частоты синхронизации F, с процессом движения, ее изменяют в зависимости от скорости V движения СП по формуле F y-P V 2F-Ch, где у - погрешность измерения; h - шаг квантования; F - ширина жесткого спектра измеряемого сигнала; Р - мощность, потребляемая от источника информации; С - энергетический порог чувствительности. 1ил. i СЛ е
| Новицкий В | |||
| П | |||
| Основы информационной теории и измерительных устройств | |||
| Л.: Энергия, 1968, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
| Способ исследования нефтяных скважин | 1979 |
|
SU953196A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ исследования скважины | 1982 |
|
SU1059156A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Патент США № 4282523, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
