I
Ичобретеши оттюснтся к оборудоял )11Ш ;и1Я пгрег руякм теплоиыде.пяюших сборок (ТПС) преимущественно из ндер 1((И-о релктора (ЯР) с естпстпекной цикуляцией теплоносителя первого коиту ра, когда требуются большие вертикалные перемещения значительных масс а процессе перегрузки.
Целью изобретения является попьгае иие долговечности и КПД путем исклю- чения геометрического отяоснтельиого скольжения ролика и ганека в зоне их контакта.
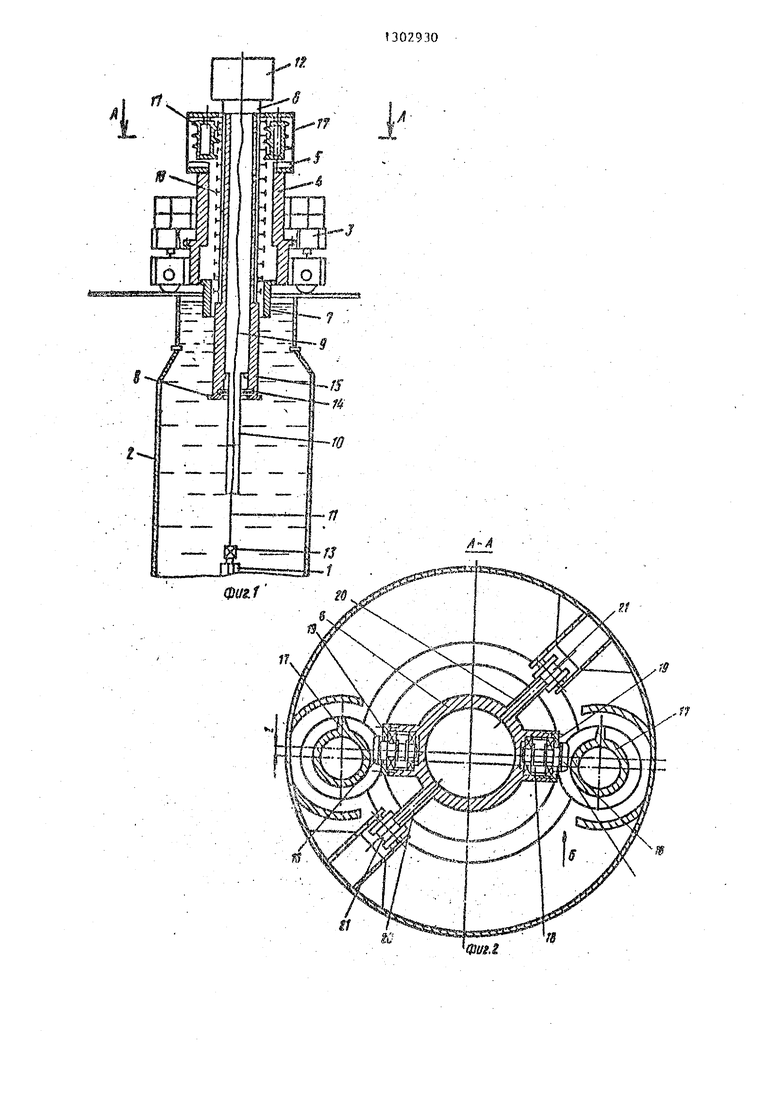
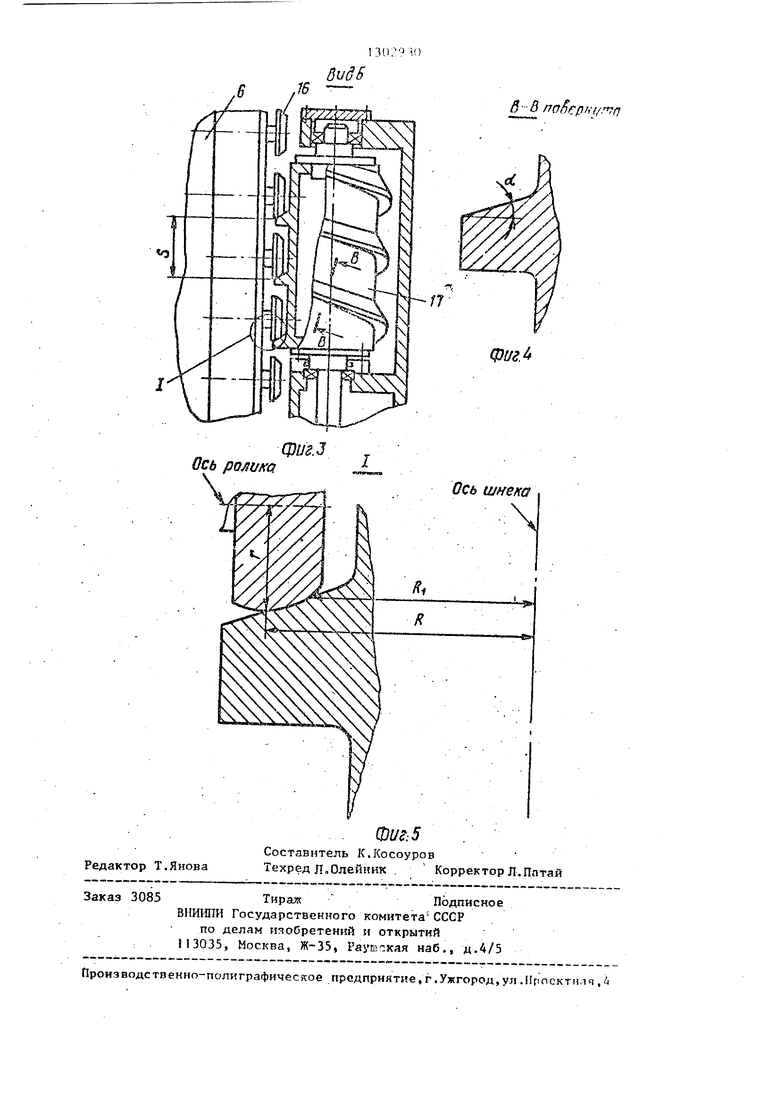
На фиг.I изображено устройство, общий вид; на фиг.2 - разрез Л - А на фиг.I; на фиг.З - вид Б фиг.2; нп фиг.4 - сечение В-В на фиг.З; на фнг.5 - уяел I на фиг.З.
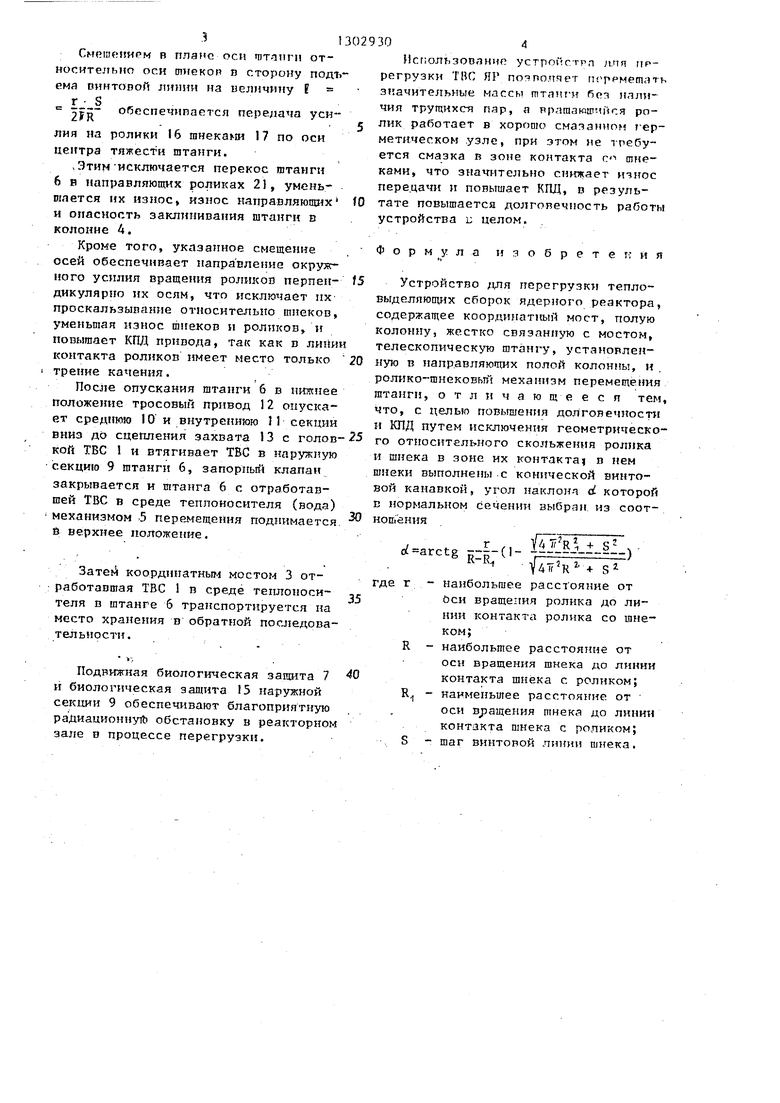
Устройство для перегрузки ТВС 1 ядерного реактора 2 содержит коорди- иатный ноет 3 с его механизмами передвижения (не показан). На координатном мосту 3 закреплена коло1П1а 4, на которой установлен ролико-шнеко- ный механизм 5 перемещения телеско- пической гатаиги 6.
Колонна А в нижней части снабжена подвижной биологической защитой 7, взаимодействующей с упорами 8 телескопической штанги 6 при ее верти- кальиом перемещении. Телескопическая штанга 6 состоит из наружной 9, средней 10 и В1гутренней 11 секций. Наружная секция 9 в верхней части имеет тросовый привод 12 захвата 13, закрепленного на Н1тжнем конце внутренней секции 11,
В нкжней части наружная секция 9 снабжена запорным клапаном 1А с приводом клапана (не показан) и биоло- гической защитой 15.
На наружной секции 9 с двух диаметрально противоположных сторон перпендикулярно оси штанги па всей длине хода с одинаковым шагом, кон- сольно закреплены ролики 16, взаимодействующие со шнеками 17, имеющими коническую винтовую канавку, угол уклона ci которой в нормальном сечении выбран из соотношения:
г. ,, fAWT-t-S- of arctg 2п , , 1
где- г - наибольшее расстояние от
оси рряшеиик ролика до линии контакта ролика со шнеком;
5О
5
0
0 5
0
5 0
5
)2
R - 1,.1 1Г Г р;)Г,СТОННИ( f T
оси ор.ипрния пшена ло линии коятактл iiftieKa с poлмк( К, - нлименынее расстояние от
оси прашг-ння шнека до линии контакта шнока с роликом; S - шаг винтоной линии шнека.
При пыттолнении шнеков с конической винтовой канавкой с углом уклона « в соответствии с приведенной формулой реализуется чистое качение роликов по mFfeKy без г-еометрического относительного скольжения, так как в любой точке па линии контакта разность окружных скоростей шнека и ролика равна нулю, если от1гошение пути, а значит, и скорости будет равно единице.
Механизм 5 перемещения закреплен на верхнем торце колонны А и имеет два шнека 17, которые связаны между собой дифференциалом через Грузоупор™ яый тормоз с электродвигателем.
Ролики 16 установлены в герметичных подшипниковых узлах 18, имеющих резиноармированную манжету 19. Наружная секция 9 на всей длине имеет направляющие 20, -взаимодействующие с направляющими роликами 21, закреп- ленньоти в верхней и нижней части ко-, лонны А.
Устройство для перегру ки ТВС ЯР работает следующим образом.
Координатным мостом 3 телескопическая штанга 6 наводится на координату отработавшей ТВС 1 в активной . зоне ядерного реактора 2 (фиг.1), за- порньй клапан А приводом клапана (не показан) открывается и включается электродвигатель механизма 5 перемещения на опускание штанги.
Электродвигатель через грузоупор- ifbtfi тормоз и диффере}1циал вращает шнеки 17, по винтовым канавкам которых катятся ролики 16. Штанга 6 по направляющим роликам 2 опускается в реактор 2 с теплоносителем (водой) на глубину, превьш1ающую длину отработавшей ТВС i .
В процессе перемещения штанги 6 дифференциал выравнивает нагрузки, прикладываем1 1е к роликам 16, исключая перекос штанги в nniipafLnHKinuix роликах 21 колонны А, л rpyloyI f) тормоз обеспечинаеп ocTniiL-inKy штпиги 6 при аварийном обет оминлнии тродвигателя.
313029
CMPiiifMWPM в плане, осп шт-шгп относительно оси шнеков D сторону подъема DHHTonoA линии из величину t
г S otn обсспечипается передача уси.){., с
ЛИЯ на ролики 16 шнекаья 17 по оси ueitTpa тяжести штанги.
,Этим исключается перекос штанги 6 в натравляющих роликах 21, умень- пшется их износ, износ направляющих fO и опасность заклинивания штанги в колонне t.
Кроме того, указанное смещение осей обеспечивает направление OKpjrar- ного усилия вращения роликов перпеп- f5 дикулярно их осям, что исключает их проскальзывание относительно шнеков, уменьшая износ пнгеков и ролнков, it повышает КП/Д привода, так как в ли11ии контакта роликов имеет место только 20 трение качения.
После опускания штанги б в нижнее положение тросовый привод 12 опускает среднюю 10 и внутреннюю I1 секции вниз до сцепления захвата 13 с голов-25 кой ТВС и втягивает ТВС в наружную секцию 9 ттанги 6, запорный клапан закрывается и штанга 6 с отработавшей ТВС в среде теплоносителя (вода) механизмом 5 перемещення поднимается. В верхнее положение.
Затей координатным мостом 3 отработавшая ТВС 1 в среде тенлоноси- ..с теля в штанге б транспортируется на место хранения в обратной последовательности.
;.
Подрижная биологическая защита 7 0 и биологическая зашита 15 наружной секции 9 обеспечивают благоприятную радиационную обстановку в реакторном зале в процессе перегрузки.
30-5
Ясг:ользовяние устройстрл для ПР- регрузки ТИС ЯР поэполяет гк ррметять з ачительные массы ттапт-и без наличия трущихся пар, а ррашаюшмйся ролик работает в хорошо смазанном т ер- метическом узле, при этом не требуется смазка в зоне контакта с шнеками, что значительно сниисает износ передачи п повышает КЩД, в результате повышается долговечность работы устройства и целом. .
Формула изобретет; и я
Устройство для перегрузки тепловыделяющих сборок ядерного реактора, содержащее координатный мост, полую колонну, жестко связанную с мостом, телескопическую штангу, установленную в направляю1цих полой колон ы, и ролико-шнековьш механизм перемещения щтанги, отличающееся тем что, с целью повышения долговечности и КПД путем исключения геометрического относительного скольжения ролика и шнека в зоне их контакта в нем шнеки выполнены с конической винтовой канавкой, угол наклон-т d которой Е нормальном Сечении выбран из соотношения
, г ,. fi + S . . c/ arctg RlR-C- -pr)
/4ir R S где r - наибольшее расстояние от
Оси вращения ролика до линии контактг ролика со мне- ком;
R - наибольшее расстояние от
оси вращения шнека до линии контакта щнека с роликом;
R - наименьшее расстояние от
оси вращения шнека до линии контакта шнека с роликом;
S - шаг винтовой линии шнека.
фиг, 2
rs
diidB
б-В noSf:p 4f.
Редактор Т.Янова Заказ 3085
Шг/г-5 .
Составитель К.Косоуров
Техред Л,Олейнкк . Корректор Л.Патай
Тираж Подписное
ВНИИПИ Государственного комитета СССР
по делам ияобретеннй и открытий 113035, Москва, Ж-35, Раутская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,уя .Ирпсктплч .(J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки тепловыделяющих сборок ядерного реактора | 1983 |
|
SU1106323A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1991 |
|
SU1820763A1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТОПЛИВНЫХ СБОРОК ВОДО-ВОДЯНОГО РЕАКТОРА ПРИ ЕГО ПЕРЕГРУЗКЕ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2017 |
|
RU2669015C1 |
| Устройство для перегрузки и контроля герметичности тепловыделяющих сборок ядерного реактора | 2020 |
|
RU2738962C1 |
| МАШИНА ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2236052C2 |
| СПОСОБ ПЕРЕГРУЗКИ И КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ РЕАКТОРА С ЖИДКИМ ТЕПЛОНОСИТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2186429C2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2637498C1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО С ПЕРЕХОДНЫМ БЛОКОМ ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ ЯДЕРНОГО РЕАКТОРА ЭЛЕМЕНТОВ АКТИВНОЙ ЗОНЫ | 2014 |
|
RU2569336C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО И МЕХАНИЗМ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЗАХВАТНЫМ РЫЧАГОВ, ИСПОЛЬЗУЕМЫЙ В НЕМ | 2013 |
|
RU2540977C1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2106023C1 |
Изобретение относится lu оборудованию для перегрузки тепловыделя1юй; Х сборок (ТБС) преимущестаенно из- ядер- .ного реактора (ЯР) с. естественной циркуляцией теплоносителя первого контура, когда требуется большие вертикальные неремещения значительных масс в процессе перегрузки. Целью изобретения является поиышеиие долг товвчности и КПД устройства для перегрузки ТВС ЯР. Устройство содержит координатный мост 3, по:тую колонну AS жестко свяэаннута с мостом 3, телескопическую штангу 6 и установленный на . колонне iHHeKO 3brf мexaииз 5 перемещения штакги 6, которая имеет захват 13. ОтработаБшая ТВС 1 птпгксартси п гатапгу б, гсоторая механизмог- 5 под- М п-1ается п колонну 4, ТВС 1 г, среде теплоносителя транспортируется коср- дннатпым мостом 3, Ролико-ш-.ековьй механизг-г 5 состоит двух кинемап - чсскп спязаппых seлcдy собой шнеко1 17 с KoHH iecKiMH БИНТОВЫМИ канавка1 п), угол уклона . о которых в нормальном сечении выбран из соотношения o- arVtgr/R-R, Cr i|TT2/l/ 2Yr; Где г - Ь аибольшее расстояние от оси ролика до линии контакта ролика со шпеком, R - наибольпср. рас- стояние от оси вращения шнека до ли- - НИИ контакта шнека с роликом, И,- иа- иненьшсе расстояние от оси врлгаения шнека до линии контакта шнека г. роликом, S - иаг винтовой линии мшека. Указанный .угол наклона по:п оля т ис- геометрическое относитолыю скольжение ролика 16 и шнека 17 г зоне 1ГА контакта, 5 ил. С С Л--.- «JIC.-V К5 QD jO ГТОй.
| 0 |
|
SU397095A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для перегрузки тепловыделяющих сборок ядерного реактора | 1983 |
|
SU1106323A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
