Изобретение относится к анализаторам, применяемым в радиоизмерительной технике.
Цель изобретения - расширение функциональных возможностей за счет многока- нальности измерения и статистического анализа результатов измерений.
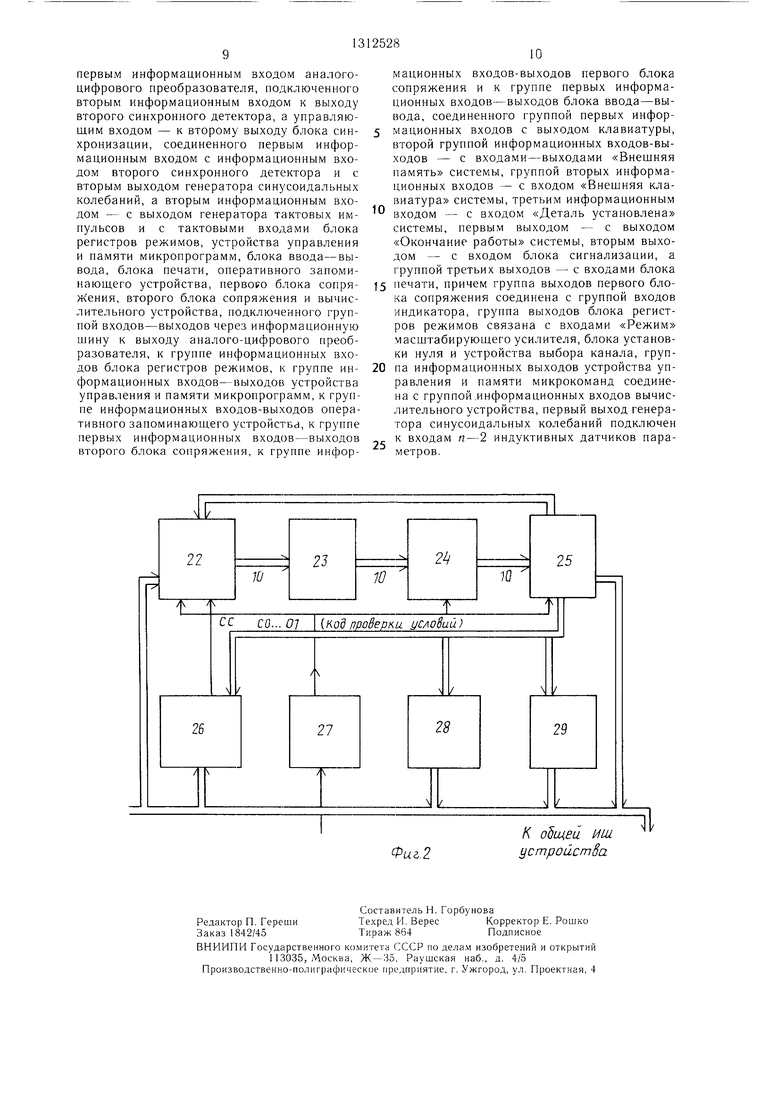
На фиг. 1 представлена блок-схема системы; на фиг. 2 - блок-схема устройства управления и памяти микропрограмм.
Система содержит индуктивные датчики параметров 1|,...,, устройство 2 выбора каналов, первый синхроннь й детектор 3, мас1ита- бирующий усилитель 4, аналого-цифровой преобразователь (АЦП) 5, генератор 6 синусоидальных колебаний (генератор запитки), второй синхронный детектор 7, блок 8 синхро- низании, блок 9 установки нуля, блок 10 регистров режима, вычислительное устройство 11, устройство 12 управления и памяти микропрограмм, оперативное запоминающее устройство (ОЗУ) 13, генератор 14 тактовых
10
ступая на вход детектора 3, вызывают, замыкая на корпус тот или иной вход на его выходе, в зависимости от фазы входного сигнала (фаза может меняться на 180° в зависимости от положения якоря датчика относительно нулевого положения) постоянное напряжение положительной (фаза входного сигнала совпадает с фазой сигнала на выходе) или отрицательной (фаза отличается на 180°) полярностей.
Это постоянное напряжение поступает на масштабируюш,ий усилитель 4, где измеряемый сигнал алгебраически суммируется с напряжением, поступающим с блока 9 установки нуля. Это позволяет выставлять нулевые показания прибора при любом исходном положении якоря датчика при измерении отклонений. Выбор соответствующего предела измерения отклонения действительного размера изделия от эталонного допуска по сигналам с датчиков осуществляется в
импульсов, первый блок 15 сопряжения (блок 20 масщтабируюш,ем усилителе 4 через щину сопряжения с индикатором), индикатор 16, второй блок 17 сопряжения, блок 18 ввода - вывода, клавиатуру 19, блок 20 сигнализации, блок 21 печати.
Устройство управления и памяти микропрограмм содержит блок 22 управления последовательностью команд, регистр 23, блок 24 полупостоянной памяти, регистр 25 микрокоманд, мультиплексор 26, элемент 27 синхронизации, первый дешифратор 28 (де- HJифpaтop источников), второй дешифратор 29 (дешифратор приемников).
Внешние индуктивные датчики 1,...„ за- питываются от генератора 6 запитки, выполненного по схеме Вина и вырабатывающего сигнал синусоидальной формы амплитудой ЗВ и частотой 20кГц. Сигналы с выходов датчиков поступают на входы устройства 2 выбора каналов. Выбор номера подключаемого датчика 1 ,...„ к измерительному тракту осуществляется автоматически (4-х разрядным кодом) по информационной шине с
данных автоматически по результатам измерения с помощью дополнительно сформированного 3-х разрядного кода, поступающего по шине данных.
С выхода усилителя 4 сигнал посту- 25 пает на АЦП 5 для последующей передачи на операционное устройство 11.
Синхронный детектор 7 выпрямляет сигнал с генератора 6 запитки и постоянное напряжение на его выходе служит в качестве опорного напряжения АЦП 5 и блока 9 установки нуля. В качестве опорного напряжения использован сигнал с генератора 6, который одновременно поступает и на датчики и является, таким образом, измеряемым (использован принцип логометра), т. е. при измерении .механических отклонений исключается погрешность за счет нестабильности сигнала с генератора 6. Вся работа прибора синхронизуется устройством 8 синхронизации, которое вырабатывает импульсы различной длительности, синхронные с напряже35
блока 10 регистров режимов. Количество 40 нием запитки.
Рассмотрим отдельно режимы электронной устаноки нуля, измерения дрейфа канала измерения и автоматического переключения пределов измерения. С размещением контролируемой детали, допусковые параметры которой хголжнь быть измерены устройством, на механическом базовом устройстве (не показано) на блок ввода - вывода 18 подается соответствующий сигнал. По этому сигналу по жесткой программе, заложенподключаемых датчиков к измерительному тракту, в принципе, неограничено и практически определяется требуемым быстродействием измерителя, т. е. требуемым количеством обрабатываемой информации, выдавае- . мой на выход, в единицу времени с одного датчика.
Сигнал с п-го датчика через устройство 2 выбора каналов поступает на детектор 3, где выпрямляется и осуществляетРассмотрим отдельно режимы электронной устаноки нуля, измерения дрейфа канала измерения и автоматического переключения пределов измерения. С размещением контролируемой детали, допусковые параметры которой хголжнь быть измерены устройством, на механическом базовом устройстве (не показано) на блок ввода - вывода 18 подается соответствующий сигнал. По этому сигналу по жесткой программе, заложенся фильтрация шумов и помех, присутствую- JQ ной в устройстве 12 управления и памяти
щих во входном сигнале. Для управления работой синхронных детекторов 3 и 7, а также тактирования АЦП 5 предназначено устройство 8 синхронизации. С приходом на его вход сигнала генератора на выходе коммикропрограмм, осуществляется электронная установка нуля каждого датчика перемещений ll,...ln.
Блок 9 установки нуля, выполненный в виде ЦАП, подает аналоговый сигнал с выхопаратора в блоке 8 синхронизации выраба-55 - второй вход масштабирующего усилитываются импульсы, по фазе совпадающие стеля 4. Если оператор не точно устанавположительной полуволной гармоническоголивает нули датчиков (исходная механисигнала с генератора 6. Эти импульсы, по-ческая установка нуля вручную), то это при
ступая на вход детектора 3, вызывают, замыкая на корпус тот или иной вход на его выходе, в зависимости от фазы входного сигнала (фаза может меняться на 180° в зависимости от положения якоря датчика относительно нулевого положения) постоянное напряжение положительной (фаза входного сигнала совпадает с фазой сигнала на выходе) или отрицательной (фаза отличается на 180°) полярностей.
Это постоянное напряжение поступает на масштабируюш,ий усилитель 4, где измеряемый сигнал алгебраически суммируется с напряжением, поступающим с блока 9 установки нуля. Это позволяет выставлять нулевые показания прибора при любом исходном положении якоря датчика при измерении отклонений. Выбор соответствующего предела измерения отклонения действительного размера изделия от эталонного допуска по сигналам с датчиков осуществляется в
0 масщтабируюш,ем усилителе 4 через щину
данных автоматически по результатам измерения с помощью дополнительно сформированного 3-х разрядного кода, поступающего по шине данных.
С выхода усилителя 4 сигнал посту- 5 пает на АЦП 5 для последующей передачи на операционное устройство 11.
Синхронный детектор 7 выпрямляет сигнал с генератора 6 запитки и постоянное напряжение на его выходе служит в качестве опорного напряжения АЦП 5 и блока 9 установки нуля. В качестве опорного напряжения использован сигнал с генератора 6, который одновременно поступает и на датчики и является, таким образом, измеряемым (использован принцип логометра), т. е. при измерении .механических отклонений исключается погрешность за счет нестабильности сигнала с генератора 6. Вся работа прибора синхронизуется устройством 8 синхронизации, которое вырабатывает импульсы различной длительности, синхронные с напряже5
нием запитки.
Рассмотрим отдельно режимы электронной устаноки нуля, измерения дрейфа канала измерения и автоматического переключения пределов измерения. С размещением контролируемой детали, допусковые параметры которой хголжнь быть измерены устройством, на механическом базовом устройстве (не показано) на блок ввода - вывода 18 подается соответствующий сигнал. По этому сигналу по жесткой программе, заложенной в устройстве 12 управления и памяти
микропрограмм, осуществляется электронная установка нуля каждого датчика перемещений ll,...ln.
Блок 9 установки нуля, выполненный в виде ЦАП, подает аналоговый сигнал с выховодит к сокращению данного предела измерения. На индикаторе 16 высвечиваются точки А и Б границ установленного предела измерения, например ± 2000 мкм, и точка, соответствующая механическому положению нуля (В). Видно, что при таком состоянии якоря датчика невозможно обеспечить диапазон + 2000 мкм. Для этого электронной установкой осуществляется как-бы сведение точки В в точку 0. Это осуществляется следующим образом.
Включается самый грубый диапазон, например ± 2000 мкм. На выходе блока 9 установки нуля устанавливается нулевое напряжение подачей с блока 10 регистров режимов, управляемого устройством 12 управления, соответствующего кода. Измеряется сигнал с каждого датчика li,...ln при его исходном (ненулевом) положении. Устройство 12 управления и памяти микропрограмм выбирает такой код на входе блока 9 установки нуля, т. е. такое напряжение на втором входе усилителя 4, чтобы результат измерения на его выходе стал равным нулю. Поиск такого кода на входе блока 9 установки нуля осуществляется по принципу поразрядного уравновешивания. Таким образом установленный код на входе блока 9 является кодом сигнала электронной установки нуля. Этот код устройства 12 управления и памяти микропрограмм заносится в память ОЗУ 13 и в блок 10 регистров. Точла, введение нулевого смещения на второй вход масштабирующего усилителя 4.
Значения дрейфа канала для каждого диапазона отличаются. Поэтому предвари5 тельно после электронной установки нуля п-ого датчика по программе с устройства 12 управления и памяти микропрограмм осуществляется включение требуемого диапазона измерения масщтабирующего усилителя 4 следующим образом. При включенном гру бом (старшем) диапазоне, на котором производилась установка нуля, осуществляется измерение сигнала с датчика при введенном с блока 10 регистров смещении (напряжений установки нуля) на второй вход усилителя 4.
15 Указанный сигнал в коде с выхода АЦП 5 по информационной щине поступает в вычислительное устройство 11, где по командам с устройства 12 управления производится сравнение измеряемого кода с выхода АЦП 5 со значениями сигналов в. каждом
20 диапазоне (±2000, ±200, ±20 мкм). Если измеряемое значение Л/ меньше значения кода М одного из диапазонов (значения /V, хранятся в памяти устройства 12 управления и памяти микропрог- рам), но больше значения кода следующего меньщего диапазона, то в вычислительном устройстве 11 производится выбор г-го диапазона. Устройство 12 управления через блок 10 регистров формирует команду на включение соответствующего диапа25
ность установки нуля при работе в последую- 0 ° масштабирующего усилителя 4.
щем на других более точных диапазонах неПосле включения требуемого диапазона
по программе с устройства 12 управления производится отключение датчика от входа устройства 2 выбора каналов и измерение в вычислительном устройстве 11 величины дрей- эг фа канала измерения. Код величины дрейфа для данного диапазона записывается в ОЗУ 13.
Затем датчик перемещения вновь под- слючается ко входу устройства 2 выбора кана лов. Выбор номеров подключаемых к нему повлияет на точность измерения, поскольку измерение осуществляется в два этапа, - при наличии и отсутствии сигнала с датчика 1, следующим образом.
Производится поиск кода (установки нуля) на входе блока 9 установки нуля в грубом диапазоне и этот код запоминается (если он не соответствует нулевому сигналу) . Производится измерение дрейфа измерительного канала уже на данном конкрет- 40 следовательно датчиков осуществляется по ном диапазоне при установке напряжения, программе, вводимой оператором с клавиату- равного нулю, на выходе блока 9 установ- ры 19 через блок 18 ввода-вывода, ки нуля (для устранения погрешности заВ блоке устаноки нуля с блока 10 регистров устанавливается ранее подобранный код электронной установки нуля для данного датчика, а на втором входе мас1итабисчет дрейфа). Вычисляется код, соответствующий нулевой точке данного диапазона. Он запоминается в ОЗУ 13 как чистое сме-
щение (установка нуля)
яг„ с„-а,,
где НТ„ - код нулевой точки п-ого датчика; eg
С„ - смещение rt-oro датчика;
di - дрейф канала измерения данного диапазона.
При измерении дрейфа канала (канал не имеет разделительных конденсаторов) по специальной программе с устройства 12 уп- 55 равления через блок .10 регистров осуществляется отключение с помощью устройст- )а 2 выбора каналов датчиков от входа канарующего усилителя 4 - соответствующее ему напряжение. В результате на выходе АЦП 5 при измерении сигнала с л-го датчика имеем
., С„,
где MU, MJ:-измepeн oe и реальное значения сигналов с п-ого датчика (в коде);
С„ - код смещения датчика. Аналогично описанному выше осуществляется измерение сигнала с любого датчика. При этом величина дрейфа канала
ла, введение нулевого смещения на второй вход масштабирующего усилителя 4.
Значения дрейфа канала для каждого диапазона отличаются. Поэтому предварительно после электронной установки нуля п-ого датчика по программе с устройства 12 управления и памяти микропрограмм осуществляется включение требуемого диапазона измерения масщтабирующего усилителя 4 следующим образом. При включенном грубом (старшем) диапазоне, на котором производилась установка нуля, осуществляется измерение сигнала с датчика при введенном с блока 10 регистров смещении (напряжений установки нуля) на второй вход усилителя 4.
Указанный сигнал в коде с выхода АЦП 5 по информационной щине поступает в вычислительное устройство 11, где по командам с устройства 12 управления производится сравнение измеряемого кода с выхода АЦП 5 со значениями сигналов в. каждом
диапазоне (±2000, ±200, ±20 мкм). Если измеряемое значение Л/ меньше значения кода М одного из диапазонов (значения /V, хранятся в памяти устройства 12 управления и памяти микропрог- рам), но больше значения кода следующего меньщего диапазона, то в вычислительном устройстве 11 производится выбор г-го диапазона. Устройство 12 управления через блок 10 регистров формирует команду на включение соответствующего диапа
рующего усилителя 4 - соответствующее ему напряжение. В результате на выходе АЦП 5 при измерении сигнала с л-го датчика имеем
., С„,
где MU, MJ:-измepeн oe и реальное значения сигналов с п-ого датчика (в коде);
С„ - код смещения датчика. Аналогично описанному выше осуществляется измерение сигнала с любого датчика. При этом величина дрейфа канала
измеряется непосредственно после каждого измерения сигнала с датчика 1 путем отключения датчика от входа по команде с устройства 2 выбора каналов устройства 12 управления. Код значения дрейфа заносится в ОЗУ 13 для дальнейших вычислений. Необходимость измерения дрейфа непосредственно после проведения измерения сигнала с датчика обусловлена тем, что величина дрейфа канала является медленной фунме задние программы работы устройства и прием информации осуществляются внешними устройствами, например персональным компьютером, ЭВМ, через блок 17 сопряжения.
Автономный режим работы устройства необходим для управления качеством производства изделий при участии оператора. По результатам контроля, по информации с экрана индикатора оператор обеспечивает пекцией времени и динамическая ошиба измере- ю реналадку оборудования и инструмента при
ния сигнала с датчика тем меньше, чем меньше разница по времени между измерением сигнала и дрейфа.
Таким образом в вычислительном устройстве осуществляется по жесткой программе с устройства 12 управления операция нахождения
М Млг - Сп - 9ь
20
50
где 5t - величина дрейфа в некоторый момент времени (во время измерения сигнала).
С выхода АЦП 5 инфорация в п-ом разрядном коде по информационной шине поступает в микропроцессорную часть системы, предназначенную для управления режи- 25 мами работы аналоговой измерительной части системы с помощью блока 10 регистров режимов; считывания данных измерения с выхода АЦП 5 к последующей обработки и запоминания результатов измерения в ОЗУ 13; выдачи данных измерения и статистической обработки через блок 15 сопряжения на индикатор 16 (дисплей); осуществления измерения и статистической обработки результатов с помощью вычислительного устройства 11, управляемого по жесткой программе с устройства 12 управления и памяти микропрограмм, и выдачи данных через устройство ввода-вывода 18 на блок 21 печати, блок 20 сигнализации .и далее на внешнюю память (накопитель); осуществления работы устройства в автоматизированной системе через устройство 17 связи.
Обработка информации осуществляется следующим образом.
После установки контролируемого изде- пия на механическое базовое устройство (МБУ), не входящее в состав предлагаемого устройства, с него через блок ввода- вывода 18 поступает сигнал с МБУ, сигнализирующий о возможности измерений.
Предлагаемая система может работать в автономном режиме, когда все операции
35
40
45
С посту.плением сигнала с МБУ на блок
18ввода-вывода, по программе, хранящейся в устройстве 12 управления, программируются регистры режимов блока 10 на выполнение следующих операций: электронная установка нуля каждого датчика включение или определение последовательности включения датчиков с различными номерами, автоматический поиск и включение требуемого диапазона измерения, измерение дрейфа канала для каждого включаемого диапазона.
Предварительно с помощью клавиатуры
19на передней панели прибора устанавливаются исходные данные: эталонные значения допусков на изделие, номера и порядок подключения датчиков, количество градаций, на которые разбивается эталонный допуск при статистическом анализе и др.
Кроме того, в автономном режиме работы предлагаемого устройства в зависимости от автоматического или ручного подрежимов работы (выбор посредством клавиатуры 19) на экране индикатора 16 высвечиваются наборы программ работы устройства. При этом в ручном подрежиме работы обеспечивается диалог оператор-устройство, т. е. допускается активное вмещатель- ство оператора в процесс выбора и изменения (из набора) программ. В автоматическом подрежиме работы исполняется лишь определенный набор программ, установленный оператором заранее.
Таким образом, после задействования части программы, определяющей установку нуля, коррекцию дрейфа, установку Диапазона, выбор или последовательное подклюизмерения и статистического анализа резуль- чение к измерительному тракту устройства татов измерения осуществляются по про- датчиков, начинает функционировать программа измерения и статанализа. При этом информация об абсолютном значении отклонения размера в коде с выхода АЦП 5
туры. Результаты измерения и анализа при jj по информационной шине с каждого датчи- этом отображаются на индикаторе 16. ка поступает в ОЗУ 13. В вычислительном Возможны ручной и автоматический ре- устройстве 11 осуществляются сравнения жимы работы. Лри автоматическом подрежи этих отклонений от установленных эталонных
граммам, записанным Л1тбо в устройстве 12 управления (жеская, постоянная), либо в .ОЗУ 13, введенным извне с внешней клавиаме задние программы работы устройства и прием информации осуществляются внешними устройствами, например персональным компьютером, ЭВМ, через блок 17 сопряжения.
Автономный режим работы устройства необходим для управления качеством производства изделий при участии оператора. По результатам контроля, по информации с экрана индикатора оператор обеспечивает пе реналадку оборудования и инструмента при
5
0
0
5
5
0
5
выпуске контролируемых изделии.
Авт.оматический подрежим работы необходим для гибкого автоматического производства изделий в условиях цехов, когда между станком, инструментом и контрольным постом (устройством) с ЭВМ замыкается связь без участия оператора.
В дальнейшем рассматривается автономный режим работы системы.
С посту.плением сигнала с МБУ на блок
18ввода-вывода, по программе, хранящейся в устройстве 12 управления, программируются регистры режимов блока 10 на выполнение следующих операций: электронная установка нуля каждого датчика включение или определение последовательности включения датчиков с различными номерами, автоматический поиск и включение требуемого диапазона измерения, измерение дрейфа канала для каждого включаемого диапазона.
Предварительно с помощью клавиатуры
19на передней панели прибора устанавливаются исходные данные: эталонные значения допусков на изделие, номера и поря док подключения датчиков, количество градаций, на которые разбивается эталонный, допуск при статистическом анализе и др.
Кроме того, в автономном режиме работы предлагаемого устройства в зависимости от автоматического или ручного подрежимов работы (выбор посредством клавиатуры 19) на экране индикатора 16 высвечиваются наборы программ работы устройства. При этом в ручном подрежиме работы обеспечивается диалог оператор-устройство, т. е. допускается активное вмещатель- ство оператора в процесс выбора и изменения (из набора) программ. В автоматическом подрежиме работы исполняется лишь определенный набор программ, установленный оператором заранее.
Таким образом, после задействования части программы, определяющей установку нуля, коррекцию дрейфа, установку Диапазона, выбор или последовательное подклю чение к измерительному тракту устройства датчиков, начинает функционировать программа измерения и статанализа. При этом информация об абсолютном значении отклонения размера в коде с выхода АЦП 5
значений для каждого датчика, также хранящихся в ОЗУ 13 и введенных клавиатурой 19 ранее. В случае выхода величины допуска за пределы эталонных значений на экране индикатора 16 появляется запись «Брак и включается световая сигнализация брака, а через устройство 18 ввода-вывода - звуковая сигнализация с помощью блока 20 сигнализации.
Если измеренные значения допусков по различным датчикам находятся в допустимых (заданных) пределах, то их абсолютные значения высвечиваются на экране индикатора 16 для каждого из адресов (датчиков), заносятся в ОЗУ 13, через устройст10
заложенная в устройстве 12 управления и памяти микропрограмм, по тем или иным причинам не устраивает потребителя. При этом с внешней клавиатуры блока 18 ввода-вывода через набор новая программа вводится в ОЗУ 13 и дальнейшая работа вычислительного устройства 11 осуществляется на основании этой программы. Новая программа при многократном ее использовании через устройство 18 ввода-вывода записывается на внешнюю память (хранится), выполненную, например, на гибких магнитных дисках.
Таким образом, систе.ма обеспечивает расщирение функциональных возможностей
во 18 ввода-вывода, фиксируются на печа- J5 устройства за счет возможности подключе- тающем устройстве 21 при реализации программы «Изображение результатов измерения.
Кроме этого, и в ручном и в автоматическом подрежимах работы устройства при
ния к системе датчиков, а также обеспечения статистической обработки результатов измерения, т. е. возможность управления качеством производства за счет выборочного контроля изделий; автоматизацию
реализации подпрограммы статистической об- 20 измерения и статистической обработки за работки результаты измерения по всем датчи- счет автоматического переключения режимов, выбора диапазонов измерения и установки нуля, сопряжение с персональным компьютером или ЭВМ и создание замкнуто25
кам из ОЗУ 13 поступают в вычислительное устройство 11, где по программе, задаваемой устройством 12 управления осуществляются алгебраическое сложение отклонений с двух произвольных датчиков, вычисление среднего арифметического и дисперсии отклонений (по партии до 99 отклонений), вычисление размаха отклонений (по партии до 99 отклонений), сортировка отклонений (отнесение измеренного отклонения к on своему интервалу), счет отклонений в каждом интервале, находятся гистограммы распределения вычисленных величин. При этом результаты статистической обработки при задействовании предпрограммы «отображение статобработки выводятся по информационной шине через и во внешние системы (при необходимости).
Тактирование всех устройств цифровой системы обработки при реализации программ записи данных, выполнения вычислений
35
го автоматического цикла ГАП; повышение скорости обработки информации с одного датчика за счет устранения циклов калибровки и установки нуля АЦП.
Формула изобретения
Система контроля параметров, содержащая два индуктивных датчика параметров, подключенных входами к первому выходу генератора синусоидальных колебаний, аналого-цифровой преобразователь и индикатор, отличающаяся тем, что, с целью расширения функциональных возможностей за счет многоканальности измерения и статистического анализа результатов измерения, в нее введены два синхронных детектора, масштаи вывода результатов осуществляется гене-40 бирующий усилитель, блок синхронизации,
ратором 14 тактовых импульсов.блок установки нуля, блок регистров режиВ автоматическом режиме устройствомов, вычислительное устройство, устройство связано с ЭВМ или персональным компью-управления и памяти микропрограмм, онера- тером. При этом введение данных в ОЗУ 13тивное запоминающее устройство, генератор устройства из памяти ЭВМ происходит безтактовых импульсов, два блока сопряжения, участия оператора, результаты же измерения блок ввода-вывода, к. швиа тура, блок сигна- из ОЗУ 13 предлагаемого устройства через устройство 17 связи поступают в оперативную память ЭВМ для дальнейшей обработки и накапливания. Этот режим, как отмечалось выше, используется для гибких автома- о входов к выходам индуктивных датчиков тических производств без участия человекапараметров, а выходом - к информа- (станки с ЧПУ, робототехника).циониому входу первого синхронного детекДополнительной возможностью предла-тора, соединенного управляющим входом с
гаемого устройства является режим пере-управляющим входом второго синхронного
программирования. Этот режим важен в томдетектора и с первым выходом блока синхрослучае, когда происходит переход на выпуск55 низации, а выходом -- с первым информа- нового вида продукции, оснащение участка станками, имеющи.ми другой профиль, и вообще при условии, что жесткая программа
лизации, блок печати, (л-2) индуктивных датчиков параметров (и - число измеряемых параметров) и устройство выбора каналов, подключенное .группой информационных
ционным входом масштабирующего усилителя, связанного вторым входом с выходом блока установки , а выходом - с
заложенная в устройстве 12 управления и памяти микропрограмм, по тем или иным причинам не устраивает потребителя. При этом с внешней клавиатуры блока 18 ввода-вывода через набор новая программа вводится в ОЗУ 13 и дальнейшая работа вычислительного устройства 11 осуществляется на основании этой программы. Новая программа при многократном ее использовании через устройство 18 ввода-вывода записывается на внешнюю память (хранится), выполненную, например, на гибких магнитных дисках.
Таким образом, систе.ма обеспечивает расщирение функциональных возможностей
устройства за счет возможности подключе-
20 измерения и статистической обработки за счет автоматического переключения режимов, выбора диапазонов измерения и установки нуля, сопряжение с персональным компьютером или ЭВМ и создание замкнуто25
on
го автоматического цикла ГАП; повышение скорости обработки информации с одного датчика за счет устранения циклов калибровки и установки нуля АЦП.
Формула изобретения
Система контроля параметров, содержащая два индуктивных датчика параметров, подключенных входами к первому выходу генератора синусоидальных колебаний, аналого-цифровой преобразователь и индикатор, отличающаяся тем, что, с целью расширения функциональных возможностей за счет многоканальности измерения и статистического анализа результатов измерения, в нее введены два синхронных детектора, масштамов, вычислительное устройство, устройство управления и памяти микропрограмм, онера- тивное запоминающее устройство, генератор тактовых импульсов, два блока сопряжения, блок ввода-вывода, к. швиа тура, блок сигна- входов к выходам индуктивных датчиков параметров, а выходом - к информа- циониому входу первого синхронного детеклизации, блок печати, (л-2) индуктивных датчиков параметров (и - число измеряемых параметров) и устройство выбора каналов, подключенное .группой информационных
низации, а выходом -- с первым информа-
ционным входом масштабирующего усилителя, связанного вторым входом с выходом блока установки , а выходом - с
первым информационным входом аналого- цифрового преобразователя, подключенного вторым информационным входом к выходу второго синхронного детектора, а управляющим входом - к второму выходу блока синхронизации, соединенного первым информационным входом с информационным входом второго синхронного детектора и с вторым выходом генератора синусоидальных колебаний, а вторым информационным входом - с выходом генератора тактовых импульсов и с тактовыми входами блока регистров режимов, устройства управления и памяти микропрограмм, блока ввода - вывода, блока печати, оперативного запоми10
мационных входов-выходов первого блока сопряжения и к группе первых информационных входов-выходов блока ввода-вывода, соединенного группой первых информационных входов с выходом клавиатуры, второй группой информационных входов-выходов - с входами-выходами «Внешняя память системы, группой вторых информационных входов - с входом «Внешняя клавиатура системы, третьим информационным входом - с входом «Деталь установлена системы, первым выходом - с выходом «Окончание работы системы, вторым выходом - с входом блока сигнализации, а группой третьих выходов - с входами блока
нающего устройства, первого блока сопря- 15 печати, причем группа выходов первого блож ения, второго блока сопряжения и вычислительного устройства, подключенного группой входов-выходов через информационную шину к выходу аналого-цифрового преобразователя, к группе информационных вхока сопряжения соединена с группой входов индикатора, группа выходов блока регистров режимов связана с входами «Режим масштабирующего усилителя, блока установки нуля и устройства выбора канала, групдов блока регистров режимов, к группе ин- 20 па информационных выходов устройства уп- формационных входов-выходов устройстваравления и памяти микрокоманд соединена с группой.информационных входов вычислительного устройства, первый выход генератора синусоидальных колебаний подключен к входам п-2 индуктивных датчиков парауправления и памяти микропрограмм, к группе информационных входов-выходов оперативного запоминаюшего устройства, к группе первых информационных входов-выходов
второго блока сопряжения, к группе инфор25
метров.
0
мационных входов-выходов первого блока сопряжения и к группе первых информационных входов-выходов блока ввода-вывода, соединенного группой первых информационных входов с выходом клавиатуры, второй группой информационных входов-выходов - с входами-выходами «Внешняя память системы, группой вторых информационных входов - с входом «Внешняя клавиатура системы, третьим информационным входом - с входом «Деталь установлена системы, первым выходом - с выходом «Окончание работы системы, вторым выходом - с входом блока сигнализации, а группой третьих выходов - с входами блока
5 печати, причем группа выходов первого блока сопряжения соединена с группой входов индикатора, группа выходов блока регистров режимов связана с входами «Режим масштабирующего усилителя, блока установки нуля и устройства выбора канала, групна с груп лительно тора син к входам
25
метров.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СБОРА, ОБРАБОТКИ И ПАКЕТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2079881C1 |
| Устройство для ввода информации от аналоговых датчиков | 1985 |
|
SU1310796A1 |
| Устройство для регистрации одиночных ударов | 1987 |
|
SU1479878A1 |
| УСТРОЙСТВО ДЛЯ СБОРА, ОБРАБОТКИ И ПАКЕТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2080653C1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399156C1 |
| Многоточечный цифровой термометр | 1985 |
|
SU1268972A1 |
| РАДИАЛЬНО-КОЛЬЦЕВОЕ УСТРОЙСТВО ДЛЯ СБОРА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2076352C1 |
| УСТРОЙСТВО СБОРА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2079882C1 |
| Устройство для ввода информации | 1991 |
|
SU1800452A1 |
Изобретение относится к анализаторам, применяемым в радиоизмерительной технике. Цель изобретения - расширение функциональных возможностей за счет многоканальности измерения и статистического анализа результата измерения. Система работает в двух режимах, - автономном и автоматическом от центрального устройства. Система содержит датчики 1 параметров, устройство 2 выбора каналов, первый синхронный детектор 3, масштабирующий усилитель 4, аналого-цифровой преобразователь 5, генератор 6 синусоидальных колебаний, второй синхронный детектор 7, блок 8 синхронизации, блок 9 установки нуля, блок 10 регистров режимов, вычислительное устройство 11, устройство 12 управления и памяти микропрограмм, оперативное запоминающее устройство 13, первый блок 15 сопряжения, индикатор 16, второй блок 17 сопряжения, блок 18 ввода - вывода, клавиатуру 19, блок 20 сигнализации, блок 21 печати. 2 ил. ш ел 00 ьо СП го 00 Фи2.1
Фиг. 2
К оЬщей иш устройства
Редактор П. Гереши Заказ 1842/45
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35. Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель Н. Горбунова
Техред И. ВересКорректор Е. Рошко
Тираж 864Подписное
| Простой индуктивный датчик перемещения.- Приборы для научных исследований | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Техническое описание электронного блока «МИКРОН, 1981. | |||
