Изобретение относится к измерительной технике, а именно к тензомет- рическим преобразователям для измерения изменяющихся во времени механических величин на вращающихся деталях- роторов силовых установок, и может быть использовано при измерении деформаций .
Цель изобретения - повышение точности измерений за счет компенсации tO периодической составляющей и вьзделе- ния информативного сигнала без искажения его спектра.
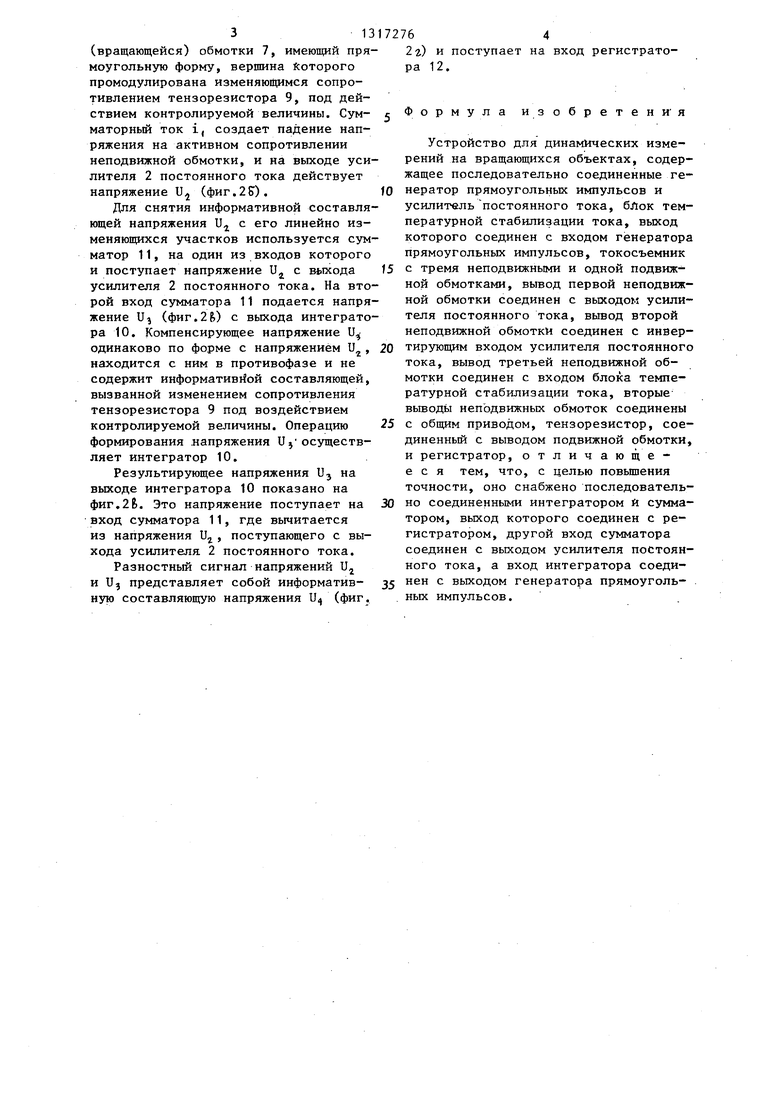
На фиг.1 представлена блок-схема устройства; на фиг.2 - диаграммы 15 напряжений.
Устройство для динамических измерений на вращающихся объектах содер- жит последовательно соединенные генератор 1 прямоугольных импульсов и 20 усилитель 2 постоянного тока, токосъемник 3 индуктивного типа с неподвижными обмотками 4 - 6 и подвижной обмоткой 7, у которых один вывод обмотки 4 соединен с выходом усилителя 2, один вывод обмотки 5 соединен с инвертирующим входом усилителя 2, один вывод обмотки 6 соединен с входом блока 8 температурной стабилизации тока тензорезистора 9, вторые 30 выводы обмоток 4-6 соединены с общим проводом, а выводы обмотки 7 подключены к тензорезистору 9, размещенному на объекте вращения (не по- казаН), последовательно соединенные 35 интегратор 10 и сумматор 11, выход которого соединен с регистратором 12, другой вход сумматора 11 соединен с выходом усилителя 2 постоянного тока, вход интегратора 10 соединен 40 с выходом генератора 1 прямоугольных импульсов, вход которого соединен с выходом блока 8 температурной стабилизации.
45
Интегратор 10 вьшолнен, например,
на базе операционного усилителя, в отрицательную обратную связь которого последовательно включены переменное сопротивление и конденсатор. Q
Устройство для динамических измеений на вращающихся объектах рабоает следующим образом.
Напряжение в форме длительных раз- ополярных прямоугольников с выхода енератора 1 прямоугольных импульсов оступает на неинвертирующий вход силителя 2 постоянного тока и приладывается к неподвижной обмотке 4,
вызывая в ней ток i . Этот ток индук- цирует в неподвижных обмотках 5 и 6 и в подвижной обмотке 7 токосъемника 3 напряжение взаимной индукции. Напряжение, возникающее на зажимах неподвижной обмотки.5, поступает на инвертирующий вход усилителя 2 постоянного тока, где сравнивается с напряжением, действующим на его неинвертирующем входе. При достаточно большом коэффициенте усиления по напряжению усилителя 2 постоянного тока разностный сигнал стремится к нулю. Это значит, что в неподвижной обмотке 5 формируется напряжение, близкое по форме к напряжению на выходе генератора 1 прямоугольных импульсов, а следовательно, такое же по форме напряжение будет сформировано и в обмотках 6 и 7, витки которых сцеплены с тем же магнитным потоком, что и витки обмотки 5. При изменении температуры окружающей среды происходит изменение омического сопротивления витков подвижной обмотки 7. Это сопротивление включено последовательно с тензо- резистором 9, в результате чего изменяется величина тока i, текущего через тензорезистор 9, а следователь- но меняется чувствительность схемы к измеряемой механической величине.
Для исключения температурного влияния на чувствительность схемы используется блок 8 температурной стабилизации тока тензорезистора 9, на вход которого поступает напряжение с не- .подвижной обмотки 6, где осуществляется его сравнение с опорным напряжением. Разностный сигнал с вьххода блока 8 температурной стабилизации тока поступает на управляющий вход генератора 1 прямоугольных импульсов, изменяя уровень его выходного напряжения в нужную сторону.
Для поддержания постоянного в пределах каждого полупериода напряжения в подвижной обмотке 7 намагничивающий ток неподвижной обмотки 4 изменяется по линейному закону. Этот ток создает падение напряжения на активном сопротивлении неподвижной обмотки 4, изменяющееся также по линейному закону в каждом полупериоде прямоугольного напряжения U, (фиг.2а), формируемого генератором 1 прямоугольных импульсов. Кроме намагничивающего тока, ток i( неподвижной обмотки 4 включает в себя и приведенный ток подвижной
313
(вращающейся) обмотки 7, имеющий прямоугольную форму, вершина Которого промодулирована изменяю1Цимся сопротивлением тензорезистора 9, под действием контролируемой величины. Сум- маторный ток i, создает падение напряжения на активном сопротивлении неподвижной обмотки, и на выходе усилителя 2 постоянного тока действует напряжение U (фиг.2Ю.
Для снятия информативной составляющей напряжения U с его линейно изменяющихся участков используется сумматор 11, на один из входов которого и поступает напряжение Uj, с выхода усилителя 2 постоянного тока. На второй вход сумматора 11 подается напряжение Uj (фиг.26) с выхода интегратора 10. Компенсирующее напряжение U одинаково по форме с напряжением U, находится с ним в противофазе и не содержит информативной составляющей, вызванной изменением сопротивления тензорезистора 9 под воздействием контролируемой величины. Операцию формирования напряжения Uj осуществляет интегратор 10.
Результирующее напряжения Uj на выходе интегратора 10 показано на фиг.26. Это напряжение поступает на вход сумматора 11, где вычитается из напряжения U, поступающего с выхода усилителя 2 постоянного тока.
Разностный сигнал напряжений Uj и и представляет собой информатив- нзпо составляющую напряжения U (фиг.
172764
22.) и поступает на вход регистратора 12.
Формула изобретен И я
Устройство для динамических измерений на вращающихся объектах, содержащее последовательно соединенные генератор прямоугольных импульсов и
усилитель постоянного тока, блок температурной стабилизации тока, выход которого соединен с входом генератора прямоугольных импульсов, токосъемник
с тремя неподвижными и одной подвижной обмотками, вьгеод первой неподвижной обмотки соединен с выходом усилителя постоянного тока, вывод второй неподвижной обмотки соединен с инвертирующим входом усилителя постоянного тока, вывод третьей неподвижной обмотки соединен с входом блока температурной стабилизации тока, вторые вьгооды неподвижных обмоток соединены
с общим приводом, тензорезистор, соединенный с выводом подвижной обмотки, и регистратор, отличающееся тем, что, с целью повышения точности, оно снабжено последовательно соединенными интегратором и сумматором, выход которого соединен с регистратором, другой вход сумматора соединен с выходом усилителя постоянного тока, а вход интегратора соединен с выходом генератора прямоуголь- . ных импульсов.
XV X
r r
ЧА.,Л|/ЧЛ А ЛЛЛЛ/МУЧ /
Редактор К.Волощук
Составитель Е.Щелина
Техред А.Кравчук Корректор В.Бутяга
Заказ 2412/36Тираж 677 Йодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий - 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(pus.i
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для динамических измерений на вращающихся объектах | 1987 |
|
SU1527486A1 |
| Устройство для контроля давления жидкости в трубопроводах | 1976 |
|
SU655918A1 |
| Многоканальное устройство для измерения температуры вращающегося объекта | 1983 |
|
SU1154557A1 |
| Устройство для измерения динамических параметров элементов вращающихся объектов | 1985 |
|
SU1335813A1 |
| Генератор напряжения ступенчатой формы | 1983 |
|
SU1113814A2 |
| Устройство для измерения динамических параметров вращающихся объектов | 1982 |
|
SU1048304A1 |
| Устройство для измерения динамических параметров вращающихся деталей силовых установок | 1985 |
|
SU1322094A2 |
| Устройство для измерения динамических параметров элементов вращающихся объектов | 1986 |
|
SU1328673A1 |
| Многоканальное устройство для измерения температуры вращающегося объекта | 1983 |
|
SU1154556A1 |
| Бестонвальное устройство стабилизации линейной скорости магнитной ленты | 1990 |
|
SU1720095A1 |
Изобретение относится к измерительной технике. Цель изобретения повышение точности за счет компенсации периодической составляющей и выделения информативного сигнала без искажения его спектра. Указанная цель достигается тем, что устройство снабжено последовательно соединенными интегратором 10 и сумматором 11. Интегратор 10 служит для формирования вычитающего (компенсирующего) напряжения и. Сумматор 11 складывает напряжение и, с напряжением U, поступающим с выхода усилителя 2 постоянного тока. Результатом этого сложения является компенсация периодической составляющей (помехи) в напряжении U и выделение информативного сигнала без искажения его спектра. 2 шт. 
| Устройство для измерения динамических параметров вращающихся объектов | 1980 |
|
SU949334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для динамических измерений на вращающихся объектах | 1981 |
|
SU1016668A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
