зовый компенсатор и делительное устройство, цифровое отсчетное устройство. Предложено дополнительно ввести второй гориз онтальный магнито- приемник, перпендикулярный первому, третий амплитудно-фазовый компенсатор, управляемый нуль-детектором, первый и второй амплитудные ры, определитель знака фазового сдви1
Изобретение относится к области электроразведки низкочастотным гармоническим полем и может быть использовано в установках, предназначенных для поиска и определения координат подземных и подводных инженерных металлических коммуникаций (трубопроводов, кабелей и т.д.) непосредственно в процессе движения носителя поисковой установки.
Цель изобретения - повышение точ- определения координат инженерных металлических коммуникаций в процессе движения носителя поисковой установки и повьшение производительности поисковых и рекогносцировочных работ на поверхности земли и в гидросреде.
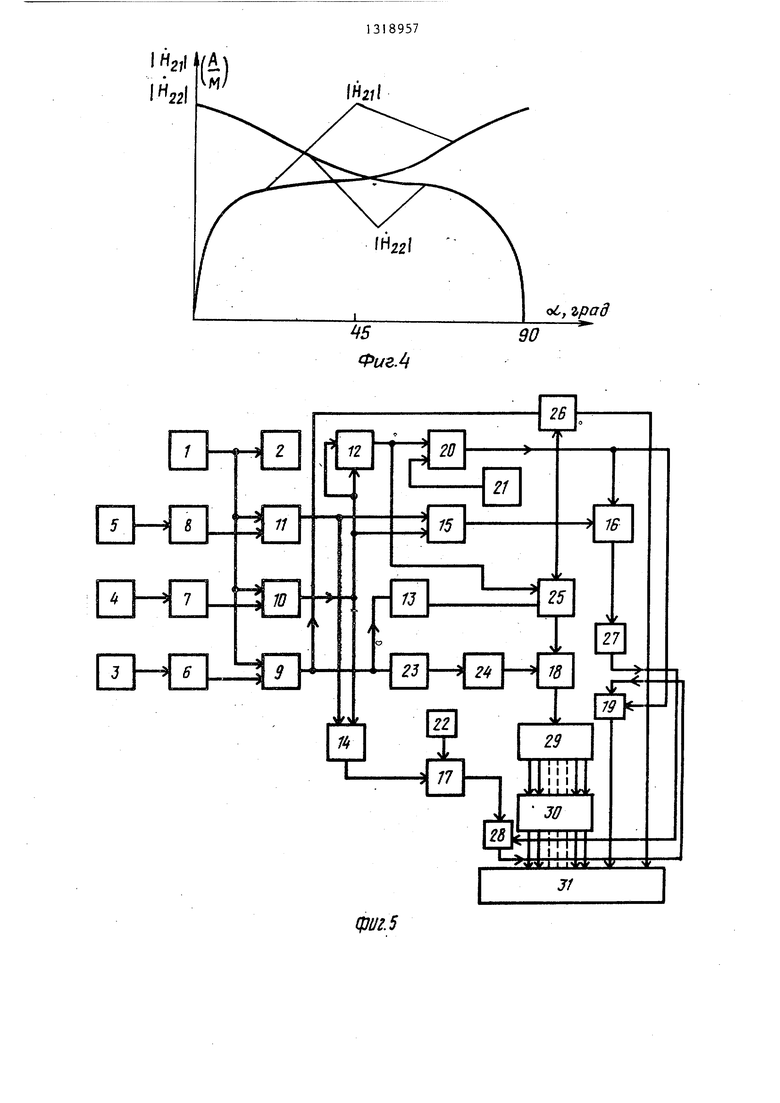
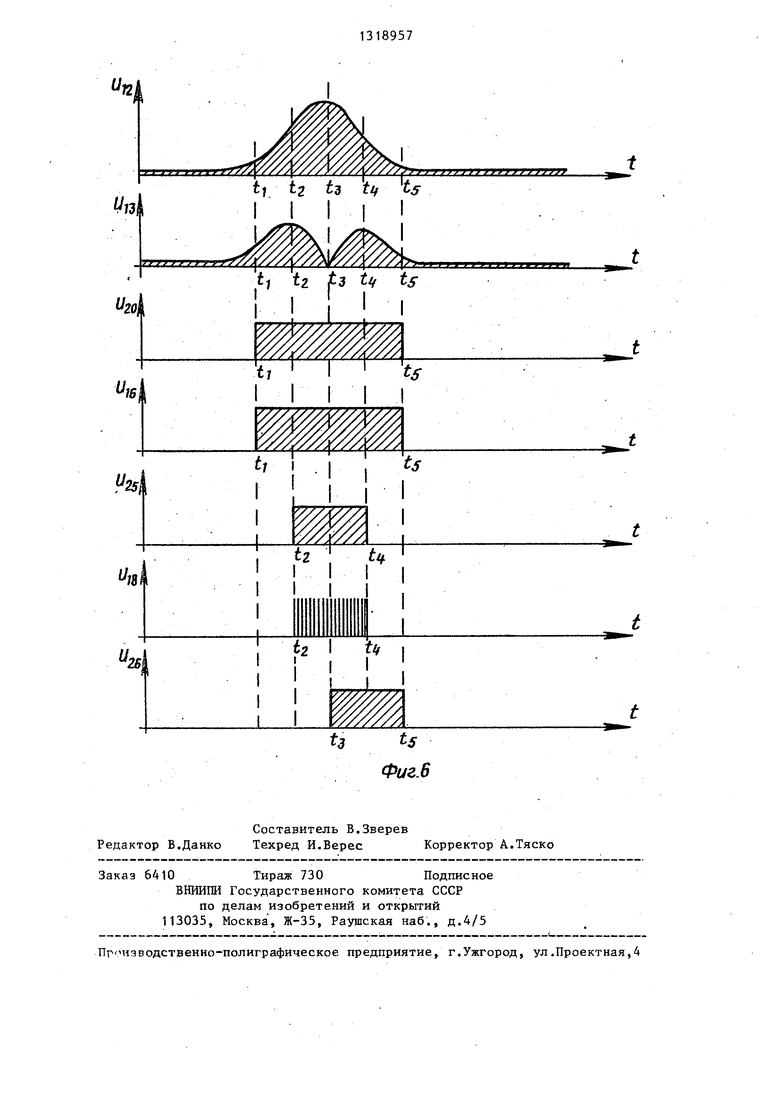
На фиг.1 приведено схематическое изображение геометрии поисковой ситуации; на фиг.2 и 3 - расчетные амплитудные зависимости профилирования для горизонтальной, параллельной- направлению движения, и вертикальной составляющих вектора напряженности вторичного магнитного поля;на фиг.4- .полученные р-асчетным цутем в одной точке профили зависимости амплитуд первой (Hj ) и второй ( горизонтальных составляющих вектора напряженности вторичного поля от угла меж ду трассой коммуникации и корпусом, носителя поисковой установки; на фиг.5 - блок-схема устройства для реализации предложенного способа определения координат инженерных металлических коммуникаций; на фиг.6 - эпюры выходных напряжений отдельных узлов устройства, объясняющие его работу.
Сущность изобретениязаключается в следующем.
га между входными си.гналами, пороговое устройство, источник опорного напряжения, первый и второй ключи, управляемый компаратор, датчик скорости, преобразователь скорость-частота, счетчик импульсов и дешифратор с соответствующими связями.2 з.п. ф-лы, 6 ил.
0
5
5
0
5
0
Известно, что в случае вертикальной составляющей вектора напряженности вторичного магнитного поля амплитудная зависимость профилирования над цилиндрической металлической муникацией характеризуется двумя максимумами, разделенными минимумом, появляющимся в момент расположения точки наблюдения точно над осью коммуникации. Аналогичная зависимость для горизонтальной составляющей напряженности вторичного магнитного поля, па раллельной направлению профилирования, имеет один максимум, возникающий при нахождении точки наблюдения над осью коммуникации. В результате теоретических и экспериментальных ис- следований установлено: независимо от значения угла между трассой коммуни- кации и курсом носителя поисковой устанозки расстояние между точками равенства амплитуд измеряемых в одной точке вертикальной и горизонтальной (параллельной направлению движения) составляющих вектора напряженности вторичного магнитного поля равно уд- |Военной высоте прохода магнитоприем- :ников над коммуникацией, т.е. удво- рнной глубине залегания; отношение измеряемьЕХ в любой точке профиля горизонтальной (параллельной направлению движения) составляющей вектора напряженности вторичного магнитного поля к другой горизонтальной составляющей, перпендикулярной первой, равно тангенсу угла между осью коммуникации и курсом носителя поисковой установки.
На фиг.1 через OXYZ обозначена выбранная декартова система координат, . ось OZ которой совмещена с геометрической осью цилиндрической коммуни31
кации радиуса а, а ось ОХ направлена вертикально вверх. В точке А (Х,, „, Z ) расположен произвольно ориёЬти- рбванный дипольный излучатель с моментом М, а в точке В (Х„, Y, Z,) - центры вертикального (Hg) и взаимоперпендикулярных горизонтальных (Hj, Hj) магнитоприемников. При этом Xf,
h - высота перемещения приемников над плоскостью YOZ, т.е. глубина залегания коммуникации, Ы - угол между осью коммуникации и курсом поисковой установки. Отметим, что 0 и h являются искомыми координатами инженерной металлической коммуникации .
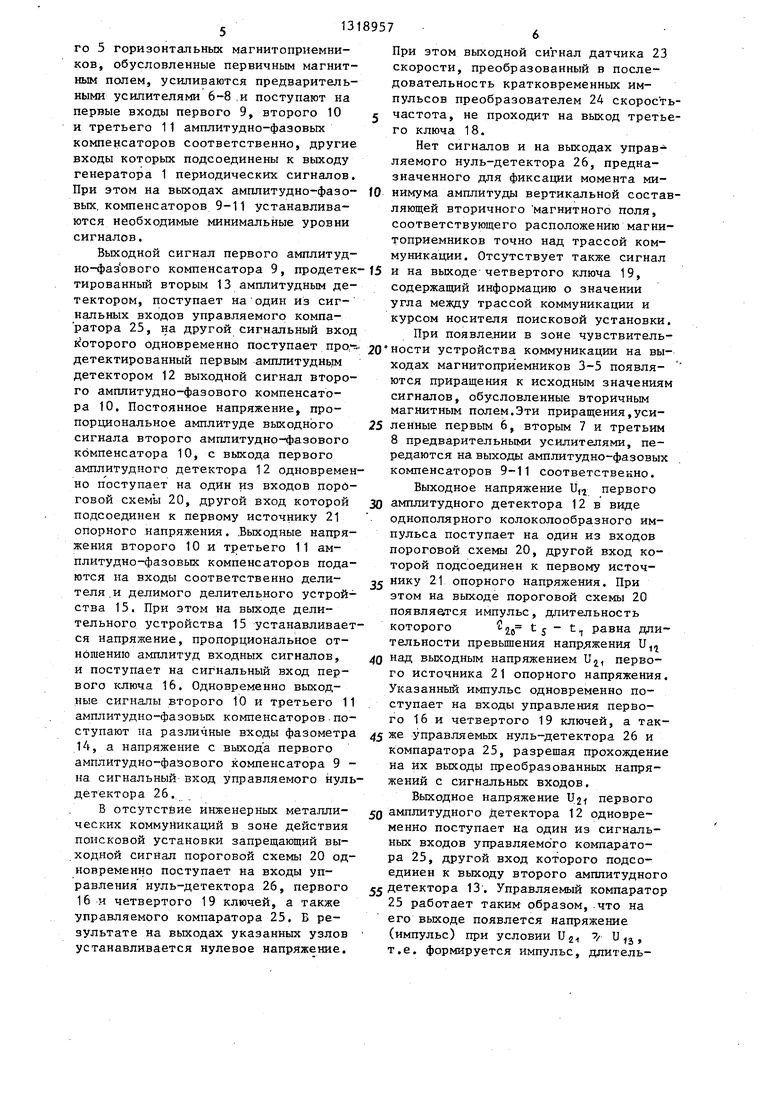
На фиг.2 приведены полученные расчетным путем амплитудные зависимости профилирования поисковой установкой с горизонтальным электрическим диполем, вертикальным и горизонтальным, параллельным направлению профилирования, магнитоприемниками над цилиндрической неоднородностью в полупроводящей среде (например, морская
и
вода) для случая d -«- и различных
значений h. При этом сплошными линиями обозначены зависимости амплитуды горизонтальной Н2 составляющей вектора напряженности вторичного магнитного поля коммуникации от Y, .а штриховыми - зависимости (Н.ь) от, Y .Из приведенных графиков фиг.2 следует, что расстояние между точками пересечения кривых для (fi ) и. (Н« ), полученных при одинаковых h, т.е. расстояние между точками равенс1ва амплитуд указанных составляющих,равно удвоенной высоте прохода магни- тоттриемников над осью коммуникации, т.е. удвоенной глубине залегания последней.
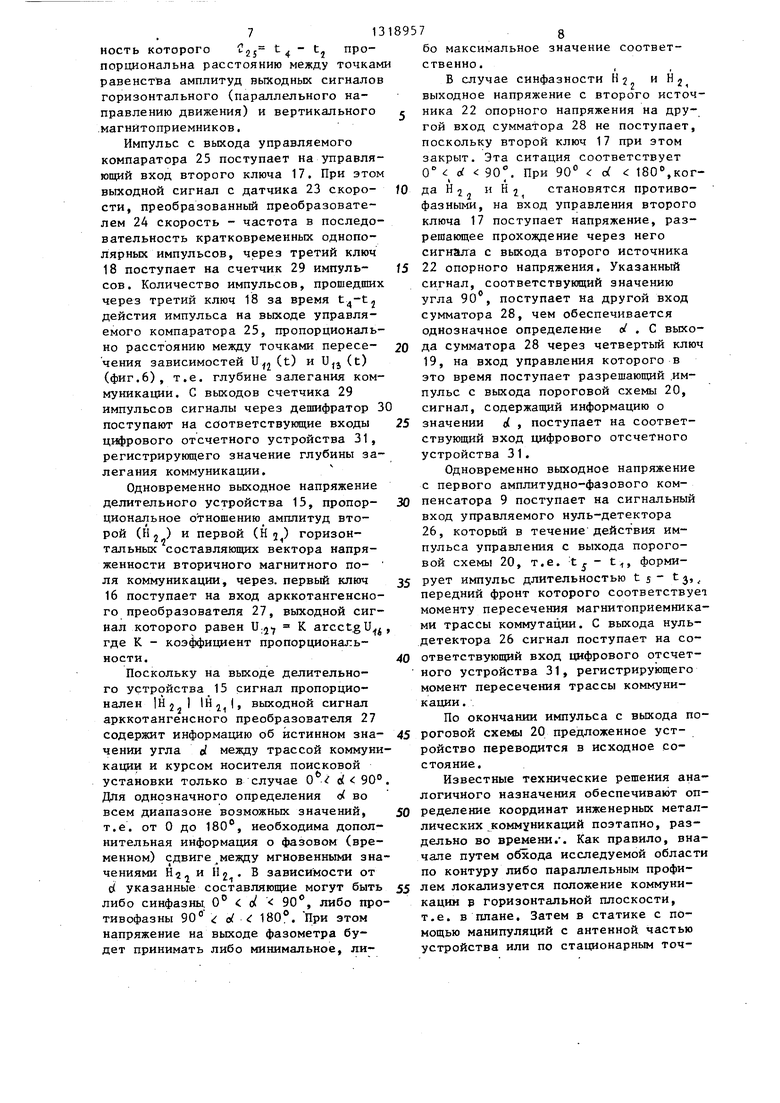
Иллюстрацией отсутствия влияния значения о на отмеченное равенство могут служить графики фиг.З, на которой изображены зависимости(Нg ) и ((2, ) о.т Y, полученные при h 2 м и различных с .
Из графиков фиг.2 и 3 можно также заключить, что (Kj ) принимает минимальное (практически нулевое) значение при прохождении вертикального магнитоприемника над осью коммуникации, что в предложенном способе использовано для определения местоположения трассы коммуникации.
74
Дхгя определения положения инженерной металлической коммуникации в плане в предлагаемом способе, кроме того, используется отношение двух взаимоперпендикулярных горизонтальных составляющих вектора напряженности вторичного магнитного поля, одна из которых параллельна направлению профилирования (в данном случае Н 2,) . Зависимости значений модулей Н и И2-, полученных в одной точке про
филя, от о при h const изображены на фиг.4. Нетрудно убедиться,что
|Й1 I (HI I ctgo(.
Поскольку котангенс является не четной функцией, а угол может изменяться в пределах 0-180, для однозначного определения положения коммуникации в плане необходима информация о фазовом (временном) сдвиге между мгновенными значениями горизонтальных составляющих hj и Hj . Устройство для реализации предложенного способа содержит генератор 1 периодических сигналов, дипольный излучатель 2, вертикальны 3, первый 4 и второй горизонтальный 5 магнитоприемники, первьй, второй и третий предварительные усилители 6-8, первый, второй и третий амплитудно- фазовые компенсаторы 9-11, первый и второй амплитудные детекторы 12 и 13, фазометр 14, делительное устройство 15,первый, второй, третий и четвертый ключи 16-19, пороговую схему 20; первый и второй источники 21 и 22 опорного напряжения, датчик 23 скорости, преобразователь 24 скорость - частота, управляемые компаратор 25 и нуль-детектор 26, арккотан- гёнсный преобразователь 27,сумматор 28, счетчик 29 импульсов, дешифра- тор 30, цифровое отсчетное устройство 31 .
Работа устройства для определения координат инженерных металлических коммуникаций, реализующего предложенный способ, осуществляется следующим образом.
Дипольный излучатель 2, питаемый генератором 1 периодических сигналов, создает в окружающем пространстве первичное электромагнитное поле. В отсутствие в зоне действия поисковой уЬтановки инженерной металлической коммуникации вьпсодные сигналы вертикального 3, первого 4 и второ
го 5 горизонтальных магнитопрнемни- ков, обусловленные первичным магнитным полем, усиливаются предварительными усилителями 6-8 ,и поступают на первые входы первого 9, второго 10 и третьего 11 амплитудно-фазовых компенсаторов соответственно, другие входы которых подсоединены к выходу генератора 1 периодических сигналов. При этом на выходах амплитудно-фазовых, компенсаторов 9-11 устанавливаются необходимые минимальные уровни сигналов.
Выходной сигнал первого амплитуд- но-фаз ового компенсатора 9, продетек тированный вторым 13 амплитудным детектором, поступает на один из сигнальных входов управляемого компаратора 25, на другой сигнальный вход к оторого одновременно поступает про детектированный первым амплитудньм детектором 12 выходной сигнал второго амплитудно-фазового компенсатора 10. Постоянное напряжение, пропорциональное амплитуде выходного сигнала второго амплитудно-фазового компенсатора 10, с выхода первого амплитудного детектора 12 одновременно поступает на один из входов порй- говой схемы 20, другой вход которой подсоединен к первому источнику 21 опорного напряжения. .Выходные напряжения второго 10 и третьего 11 амплитудно-фазовых компенсаторов подаются на входы соответственно делителя, и делимого делительного устройства 15. При этом на выходе делительного устройства 15 устанавливается напряжение, пропорциональное отношению амплитуд входных сигналов, и поступает на сигнальный вход первого ключа 16. Одновременно выходные сигналы второго 10 и третьего 11 амплитудно-фазовых компенсаторов.поступают на различные входы фазометра 14, а напряжение с выхода первого амплитудно-фазового компенсатора 9 - на сигнальный вход управляемого нуль детектора 26. .
В отсутствие инженерных металлических коммуникаций в зоне действия поисковой установки запрещающий выходной сигнал пороговой схемы 20 одновременно поступает на входы управления нуль-детектора 26, первого 16 и четвертого 19 ключей, а также управляемого компаратора 25. Б результате на выходах указанных узлов устанавливается нулевое напряжение.
0
5
При зтом выходной сигнал датчика 23 скорости, преобразованный в последовательность кратковременных импульсов преобразователем 24 скорость- частота, не проходит на выход третьего ключа 18.
Нет сигналов и на выходах управ- ляемого нуль-детектора 26, предназначенного для фиксации момента минимума амплитуды вертикальной составляющей вторичного магнитного поля, соответствующего расположению магни- топриемников точно над трассой коммуникации. Отсутствует также сигнал и на выходе четвертого ключа 19, содержащий информацию о значении угла между трассой коммуникации и курсом носителя поисковой установки.
При появлении в зоне чувствитель- ности устройства коммуникации на выходах магнитоприемников 3-5 появляются приращения к исходным значениям сигналов, обусловленные вторичным магнитным полем.Эти приращения,уси- 5 ленные первым 6, вторым 7 и третьим 8 предварительными усилителями, передаются на выходы амплитудно-фазовых компенсаторов 9-11 соответственно.
Выходное напряжение U, первого амплитудного детектора 12 в виде однополярного колоколообразного импульса поступает на один из входов пороговой схемы 20, другой вход которой подсоединен к первому источнику 21 опорного напряжения. При
0
5
этом на выходе пороговой схемы 20 появляется импульс, длительность которого
25 t J - t;, равна длительности превьшения напряжения U,,
0 над выходным напряжением Uj, первого источника 21 опорного напряжения. Указанньй импульс одновременно поступает на входы управления первого 16 и четвертого 19 ключей, а так45 же управляемых нуль-детектора 26 и компаратора 25, разрещая прохождение на их выходы преобразованньк напряжений с сигнальных входов.
Выходное напряжение ii первого
0 амплитудного детектора 12 одновременно поступает на один из сигнальных входов управляемого компаратора 25, другой вход которого подсоединен к выходу второго амплитудного
детектора 13. Управляемый компаратор 25 работает таким образом,.что на его выходе появлется напряжение
2-t
и
(импульс) при условии и
т.е. формируется импульс, длитель13
НОСТЬ которого -25 4 Пропорциональна расстоянию между точкам равенства амплитуд выходных сигналов горизонтального (параллельного направлению движения) и вертикального .магнйтоприемников.
Импульс с выхода управляемого компаратора 25 поступает на управляющий вход второго ключа 17, При этом выходной сигнал с датчика 23 скоро- сти, преобразованный преобразователем 24 скорость - частота в последовательность кратковременных однопо- лярных импульсов, через третий ключ 18 поступает на счетчик 29 импуль- сов. Количество импульсов, прошедших через третий ключ 18 за время дейстия импульса на выходе управляемого компаратора 25, пропорционально расстоянию между точками пересе- чения зависимостей (t) и U (t) (фиг.6), т.е. глубине залегания коммуникации. С выходов счетчика 29 импульсов сигналы через дешифратор 3 поступают на соответствующие входы цифрового отсчетного устройства 31, регистрирующего значение глубины залегания коммуникации.
Одновременно выходное напряжение делительного устройства 15, пропор- циональное отношению амплитуд второй (Н2 ) и первой (Н ир горизонтальных составляющих вектора напряженности вторичного магнитного по- ля коммуникации, через, первый ключ 16 поступает на вход арккотангенсно- го преобразователя 27, выходной сигнал которого равен V. К arcct U где К - коэффициент пропорциональности.
Поскольку на выходе делительного устройства 15 сигнал пропорционален iHj 1 , выходной сигнал арккотангенсного преобразователя 27 содержит информацию об истинном значении угла d между трассой коммуникации и курсом носителя поисковой установки только в случае 0 d 90° Для однозначного определения о( во всем диапазоне возможных значений,
т.е. от О до 180 , необходима дополнительная информация о фазовом (временном) сдвиге между мгновенными значениями Hj- и Н2 . В зависимости от о( указанные составляющие могут быть либо синфазны. 0 о 90, либо про- тивофазны 90° с : 180. При этом напряжение на выходе фазометра будет принимать либо минимальное, ли
8
с
0 5 0 5
0
0
бо максимальное значение соответственно.
В случае синфазности Hj HZ, выходное напряжение с второго источника 22 опорного напряжения на дру-. гой вход сумматора 28 не поступает, поскольку второй ключ 17 при этом закрыт. Эта ситадия соответствует О -i of 90°. При 90° ( 180%ког- да Н 2 . и Hj становятся противофазными, на вход управления второго ключа 17 поступает напряжение, разрешающее прохождение через него сигнзша с выхода второго источника 22 опорного напряжения. Указанный сигнал, соответствующий значению угла 90, поступает на другой вход сумматора 28, чем обеспечивается однозначное определение el , С выхода сумматора 28 через четвертый ключ 19, на вход управления которого в это время поступает разрешающий импульс с выхода пороговой схемы 20, сигнал, содержащий информацию о значении в( , поступает на соответствующий вход цифрового отсчетного устройства 31.
Одновременно выходное напряжение с первого амплитудно-фазового компенсатора 9 поступает на сигнальный вход управляемого нуль-детектора 26, который в течение действия импульса управления с выхода пороговой схемы 20, т.е. t - t, форми5
0
рует импульс длительностью ts 3 передний фронт которого соответствует моменту пересечения магнитоприемника- ми трассы коммутации. С выхода нуль- детектора 26 сигнал поступает на соответствующий вход цифрового отсчетного устройства 31, регистрирующего момент пересечения трассы коммуникации.
По окончании импульса с выхода по- 5 роговой 20 предложенное устройство переводится в исходное состояние.
Известные технические решения аналогичного назначения обеспечивают определение координат инженерных металлических коммуникаций поэтапно, раздельно во времени,. Как правило, вначале путем об1сода исследуемой области по контуру либо параллельным профилем Локализуется положение коммуникации р горизонтальной плоскости, т.е. в плане. Затем в статике с помощью манипуляций с антенной частью устройства или по стационарным точкам профильных кривых определяется глубина залегания неоднородности. В том и другом случае необходимо обеспечить строго определенное взаимное расположение антенной части устройства и неоднородности.
Отмеченные недостатки, обуславливая низкую точность и производительность поисковых работ, ограничивают, а зачастую делают принципиально не пригодными известные способы и устройства, их реализующие, при решении указанных задач, особенно в гидро среде.
Подуожительный эффект предложенных способов определения инженерных металлических коммуникаций и устройства для его реализации состоит в возможности однозначного с высокой точностью определения положения коммуникации за один проход поисковой установки без изменения ориентации момента тока излучателя и осей чувствительности приемников поля при произвольном положении коммуникации относительно антенной части устройства, что обеспечивает существенное по- вьпиение производительности поисковых и рекогносцировочных работ с поверхности земли и в гидросреде.
Формула изобретения
1. Способ определения координат инженерных металлических коммуникаций, включающий возбуждение первичного электромагнитного поля диполь- ным излучателем, измерение в одной точке горизонтальной,параллельной направлению движения, и вертикальной составляющих вектора напряженности вторичного магнитного поля и.оп- ределе1ше момента появления минимума амплитуды вертикальной составляющей, отличаю щ и й- с я тем, что, с целью повышения точности определения координат инженерных металлических коммуникаций в процессе движения носителя поисковой установки, в указанной точке одновременно измеряют другую горизонтальную составляющую, перпендикулярную первой, определяют отношение амплитуд горизонтальньк соного поля, причем по временному интервалу между моментами равенства амплитуд указанных составляющих при известной скорости движения опредес ляют глубину залегания инженерной металлической коммуникации, а по зна чению отношения амплитуд и временному сдвигу между мгновенными значениями горизонтальных составляющих,
10. а также моменту появления минимума амплитуды вертикал7ьной составляющей - ее положение в плане.
2. Устройство для определения координат инженерньк металлических ком
)5 муникаций, содержащее генератор периодических сигналов, соединенный с дипольным излучателем, последовательно соединенные магнитоприемник, первый предварительный усилитель и
20 первый амплитудно-фазовый компенсатор, последовательно соединенные го- ризонтальньй магнитоприемник, ось чувствительности которого параллельна направлению движения, а центр
25 совмещен с центром вертикального магнитоприемника, второй предварительный усилитель, второй амплитуд- . но-фазовый компенсатор и делительное устройство, цифровое отсчетное уст30 ройство, причем выход генератора периодических сигналов соединен с вторыми входами первого и второго амплитудно-фазовых компенсаторов, о т- личающееся тем, что, с целью повьш1ения производительности поисковых и рекогносцировочных работ на поверхности земли и в гидросреде, в него дополнительно введены второй горизонтальный магнитоприемник, пер- пендикулйрный первому, третий предва рительный усилитель, третий амплитуд но-фазовый компенсатор, два амплитуд ных детектора, фазометр, четыре ключа, пороговая схема, два источника
опорного напряжения, датчик скорости, преобразователь скорость-частота, управляемые компаратор и нуль- детектор, арккотангенсный преобразователь, сумматор, -счетчик импульсов СП и дешифратор, при этом второй горизонтальный магнитоприемник, центр которого совмещен с центрами двух других приемников, через третий пред
35
40
варительный усилитель подключен к ставляющих, а также фиксируют моменты 55 входов третьего амплитуд- равенства амплитуд вертикальной и но-фазового компенсатора, другой перпендикулярной направлению движе- вход которого подсоединен к выходу ния горизонтальной составляющих век- генератора периодических сигналов, ТОРЯ напряженности вторичного магнит- а выход - к входу делимого делительного поля, причем по временному интервалу между моментами равенства амплитуд указанных составляющих при известной скорости движения определяют глубину залегания инженерной металлической коммуникации, а по значению отношения амплитуд и временному сдвигу между мгновенными значениями горизонтальных составляющих,
а также моменту появления минимума амплитуды вертикал7ьной составляющей - ее положение в плане.
2. Устройство для определения координат инженерньк металлических коммуникаций, содержащее генератор периодических сигналов, соединенный с дипольным излучателем, последовательно соединенные магнитоприемник, первый предварительный усилитель и
первый амплитудно-фазовый компенсатор, последовательно соединенные го- ризонтальньй магнитоприемник, ось чувствительности которого параллельна направлению движения, а центр
совмещен с центром вертикального магнитоприемника, второй предварительный усилитель, второй амплитуд- но-фазовый компенсатор и делительное устройство, цифровое отсчетное устройство, причем выход генератора периодических сигналов соединен с вторыми входами первого и второго амплитудно-фазовых компенсаторов, о т- личающееся тем, что, с целью повьш1ения производительности поисковых и рекогносцировочных работ на поверхности земли и в гидросреде, в него дополнительно введены второй горизонтальный магнитоприемник, пер- пендикулйрный первому, третий предварительный усилитель, третий амплитудно-фазовый компенсатор, два амплитудных детектора, фазометр, четыре ключа, пороговая схема, два источника
опорного напряжения, датчик скорости, преобразователь скорость-часто- та, управляемые компаратор и нуль- детектор, арккотангенсный преобразователь, сумматор, -счетчик импульсов и дешифратор, при этом второй горизонтальный магнитоприемник, центр которого совмещен с центрами двух других приемников, через третий пред
- 1113
ного устройства и одному из входов фазометра, другой вход которого подключен к выходу второго амплитудно-фазового компенсатора, одновременно подсоединенного к входу первого амплитудного детектора, выход первого амплитудного детектора одновременно подключен к одному из входов пороговой схемы, другой вход которой соединен с первым источником опорного напряжения, и одному из нальных входов управляемого компаратора, выход первого амплитудно- фазового компенсатора одновременно подключен к сигнальному входу управляемого нуль-детектора и входу второго амплитудного детектора, выход ко которого соединен с другим сигнальным входом управляемого компаратора, выход пороговой схемы одновременно подключен к входам управления управляемого нуль-детектора, управляемого компа-ратора, первого и четвертого ключей, сигнальный вход первого клю-
712
ча соединен с выходом делительного устройства, а выход - с входом арк- котангенсного преобразователя, выход фазометра подключен к входу управления второго ключа, сигнальный вход.которого соединен с вторым источником опорного напряжения, а выход - с одним из входов сумматора, другой вход которого подключен к выходу арккотангенсного преобразо- вателя, выход сумматора соединен с сигнальным входом четвертого ключа, выход датчика скорости через пре- образ ователь скорость-частота подсоединен к сигнальному входу третьего ключа, вход управления которого соединен с выходом управляемого компаратора, а выход - с входом счетчика
импульсов, выходы счетчика импульсов соединены с входами дешифратора, а выходы дешифратора, управляемого нуль- детектора, а также четвертого ключа под- . соединены к соответствующим входам цифрового отсчетного устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Адаптивный компенсатор помех | 1991 |
|
SU1807570A1 |
| Установка для моделирования электромагнитного поля | 1978 |
|
SU737905A1 |
| ИЗМЕРИТЕЛЬ ФАЗ ОСЦИЛЛОГРАФИЧЕСКИЙ | 2005 |
|
RU2314543C2 |
| Бесконтактный искатель повреждения изоляции коммуникации | 1987 |
|
SU1684721A1 |
| Устройство для определения трассы прокладки протяженного проводника | 1976 |
|
SU606150A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОММУНИКАЦИЙ | 1999 |
|
RU2180447C2 |
| Устройство для электроразведки | 1979 |
|
SU842680A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ АМПЛИТУДНО-ЧАСТОТНОЙ И ФАЗОЧАСТОТНОЙ ХАРАКТЕРИСТИК УСИЛИТЕЛЕЙ | 2011 |
|
RU2476893C1 |

Изобретение относится к электроразведке низкочастотным гармоническим полем и может быть использовано в установках, предназначенных для поиска и определения координат подземных и подводных инженерных металлических коммуникаций (трубопроводов, кабелей и т.д.) непосредственно в процессе движения носителя поисковой установки. Целью изобретения является повьшение точности определения координат инженерных металлических коммуникаций в процессе движения носителя поисковой установки и повьшение производительности поисковых и рекогносцировочных работ с поверхности земли и в гидросреде. Способ определения координат инженерных металлических коммуникаций включает возбуждение первичного электромагнитного поля дипольным излучателем. измерение в одной точке горизонтальной, параллельной направлению движения и вертикальной составляющих вектора напряженности магнитного поля и определение момента выявления минимума модуля вертикальной составляющей. Дополнительно предложено в указанной точке одновременно измерять другую горизонтальную составляющую, перпендикулярную первой, измерять модуль и определять знак аргумента от- ношения горизонтальных составляющих, а также фиксировать моменты равенства модулей вертикальной и горизонтальной составляющих вектора напряженности вторичного магнитного поля, причем по временному интервалу между моментами равенства модулей указанных составлякщих определять глубину залегания инженерной металлической коммуникации, а по значению модуля и знаку аргумента отношения горизонтальных составляющих и моменту Появления минимума модуля вертикальной составляющей - ее положение в плане. Устройство для опрделения координат инженерных металлических коммуникаций содержит генератор периодических сигналов, соединенный с дидольным излучателем, последовательно соединенные вертикальный магнитоприемник, первый предврительный усилитель и первый амплитудно-фазовый компенсатор, последовательно соединенные горизонтальный магнитоприемник, ось чувствительности которого параллельна направлению движения, а центр совмещен с центром вертикального маг- нитоприемника, второй предварительный усилитель, второй амплитудно-фа с 
S - -WУз д)
Фиг.1
«в f Нг1
-в S Ц
IH2,I IHe
h ln
Уп.1$(,п
iHeli
/d) U/-iH,i
«2,/
. J/nJStnA
S fw/
oL, град
фиг. 5
| Гордиенко В.И., Убогий В.Ц., Ярошевский Е.В | |||
| Электромагнитное обнаружение инженерных коммуникаций и локальных аномалий | |||
| Киев: Наукова думка, 1981, с.226 | |||
| Устройство для определения глубины залегания кабеля на переменном токе | 1978 |
|
SU739451A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
