Изобретение относится к радиолокационной технике и может быть использовано в радиолокационных станциях (РЛС), предназначенных для навигации и обнаружения целей (в частности надводных целей), в том числе - с последующим сопровождением выбранной цели по дальности и угловым координатам, преимущественно в РЛС, работающих в условиях радиоэлектронного противодействия и установленных на подвижных носителях, а также - для повышения экологической чистоты и электромагнитной совместимости РЛС с другими радиосредствами.
В настоящее время для радионавигации и обнаружения надводных целей применяются импульсные РЛС, например, типа "Furuno" [1, 2], в которых используются в качестве зондирующих короткие импульсные сигналы с высокой скважностью и сравнительно высокой импульсной мощностью, необходимой для обнаружения эхо-сигналов от надводных целей на требуемой дальности. Недостатком таких РЛС является применение мощных зондирующих импульсов при некогерентном принципе построения и работа на постоянной несущей частоте, что является причиной низкой скрытности зондирующего излучения, а стало быть, низкой помехозащищенности, прежде всего, по отношению к ответным и прицельным помехам, а также низкой экологической чистоты и электромагнитной совместимости.
Известен способ обнаружения целей, реализованный в импульсной РЛС [3] (по патенту США № 4338604, МПК G 01 S 13/24, публикация 1982 г.) и основанный на использовании сложных когерентных сигналов с малой скважностью и сравнительно малой импульсной мощностью с внутриимпульсной модуляцией и перестройкой несущей частоты от импульса к импульсу. При этом обеспечиваются требуемые дальность обнаружения и разрешение по дальности и достигаются повышение скрытности и помехозащищенности, а также - экологической чистоты и электромагнитной совместимости.
Основным недостатком способа обнаружения и РЛС [3] является сравнительно высокий уровень остатков (боковых лепестков автокорреляционной функции) при сжатии сложных сигналов и, как следствие, недостаточный динамический диапазон и малая вероятность обнаружения малоразмерных объектов, маскируемых остатками эхо-сигналов от больших объектов. Другим недостатком является неоптимальный выбор параметров зондирующих импульсов при отсутствии их регулирования, а также учета собственной скорости носителя РЛС.
Наиболее близким к предлагаемому изобретению является способ обнаружения целей, реализованный в РЛС [4] (патент РФ № 2039365, G 01 S 13/52 с приоритетом от 27.09.93, публ. 09.07.95) и принятый в качестве прототипа предлагаемого изобретения. Способ-прототип включает генерирование высокостабильных по частоте СВЧ-колебаний, скачкообразную перестройку их несущей частоты fc от периода к периоду повторения импульсов по произвольному закону, внутриимпульсную фазовую манипуляцию двоичным многоразрядным кодом, перестройку кода фазовой манипуляции от периода к периоду повторения импульсов, импульсную амплитудную модуляцию, излучение зондирующих импульсов, прием отраженных сигналов, супергетеродинное преобразование принимаемых сигналов с помощью гетеродинных СВЧ-колебаний с высокостабильной частотой, перестраиваемой синхронно с несущей частотой зондирующих импульсов, усиление принимаемых сигналов по промежуточной частоте, квадратурное фазовое детектирование сигналов, усиление квадратурных составляющих сигналов по видеочастоте, бинарное квантование квадратурных составляющих по нулевому уровню, цифровую согласованную фильтрацию - сжатие по времени квадратурных составляющих, объединение сжатых квадратурных сигналов, бинарное квантование объединенных сигналов с пороговым уровнем, выбираемым из условия допустимой вероятности превышения его шумовыми выбросами, межпериодное накопление квантованных сигналов за время пачки и обнаружение пачки импульсных эхо-сигналов путем сравнения результата накопления с пороговым уровнем.
РЛС [4], принятая в качестве прототипа предлагаемого устройства, содержит последовательно соединенные синхронизатор, блок перестройки частоты, возбудитель, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно соединенные усилитель высокой частоты, смеситель, усилитель промежуточной частоты, последовательно соединенные блок фазовых детекторов, блок видеоусилителей и блок амплитудных квантователей, а также два идентичных перестраиваемых дискретных фильтра, выходы которых соединены, соответственно, с первым и вторым входами блока объединения квадратур, выход которого соединен с первым входом устройства обработки информации, и блок приводов антенны, выход которого соединен кинематической связью с антенной, причем вход усилителя высокой частоты присоединен к третьему плечу антенного переключателя, гетеродинный вход смесителя и вход напряжения опорной частоты блока фазовых детекторов соединены с соответствующими выходами возбудителя, первый выход - упреждающих импульсов - синхронизатора соединен также с первым входом генератора кода, второй вход которого, объединенный с входами управления записью кодов перестраиваемых дискретных фильтров, подключен к выходу пачек импульсов тактовой частоты синхронизатора, а выход - к входам кода фазового манипулятора и перестраиваемых дискретных фильтров, выход синхроимпульсов синхронизатора соединен через импульсный модулятор с усилителем мощности, а также - с соответствующим входом устройства обработки информации, выход импульсов тактовой частоты синхронизатора соединен с тактовыми входами перестраиваемых дискретных фильтров и устройства обработки информации, а информационный вход последнего подключен к выходу кодов азимута блока приводов антенны.
В известном изобретении обеспечивается полное подавление остатков после сжатия благодаря сочетанию перестройки кода фазовой манипуляции (ФМ) от импульса к импульсу с цифровой согласованной фильтрацией ФМ-сигналов и последующим межпериодным накоплением бинарно-квантованных сжатых сигналов за время пачки, что позволяет обеспечить надежное обнаружение эхо-сигналов от малоразмерных объектов.
Недостатком прототипа является недостаточно высокая скрытность зондирующего излучения и, как следствие, недостаточно высокая помехозащищенность и экологическая чистота РЛС как из-за неоптимального выбора параметров зондирующих импульсов при отсутствии учета собственной скорости носителя РЛС, так и из-за отсутствия регулирования параметров сигналов и обработки по мере уменьшения дальности до целей. В частности, речь идет о снижении наблюдаемости эхо-сигналов от целей, находящихся на дальностях R≪R0, где R - дальность до цели,  , с - скорость света, ТИ - длительность зондирующих импульсов, используемых для обнаружения эхо-сигналов на максимальной требуемой дальности, а также - о недостаточной разрешающей способности по дальности и точности измерения дальности целей, находящихся на малых дальностях, что в результате может привести к ошибкам навигации.
, с - скорость света, ТИ - длительность зондирующих импульсов, используемых для обнаружения эхо-сигналов на максимальной требуемой дальности, а также - о недостаточной разрешающей способности по дальности и точности измерения дальности целей, находящихся на малых дальностях, что в результате может привести к ошибкам навигации.
Технической задачей изобретения является повышение скрытности зондирующего излучения и, как следствие, помехозащищенности и экологической чистоты РЛС путем оптимального выбора параметров зондирующего излучения и параметров обработки сигналов с учетом собственной скорости носителя РЛС, регулирования этих параметров в зависимости от ожидаемой или измеряемой дальности до обнаруживаемых целей, а также оптимальной фильтрации сигналов от целей в ближней зоне для дальностей  .
.
Сущность изобретения заключается в том, что в способе обнаружения целей импульсной радиолокационной станцией, включающем генерирование высокостабильных по частоте СВЧ-колебаний, скачкообразную перестройку их несущей частоты fc от периода к периоду повторения импульсов по произвольному закону, внутриимпульсную фазовую манипуляцию двоичным многоразрядным кодом, перестройку кода фазовой манипуляции от периода к периоду повторения импульсов, импульсную амплитудную модуляцию, излучение зондирующих импульсов, прием отраженных сигналов, супергетеродинное преобразование принимаемых сигналов, усиление принимаемых сигналов по промежуточной частоте, квадратурное фазовое детектирование сигналов, усиление квадратурных составляющих сигналов по видеочастоте, бинарное квантование квадратурных составляющих сигналов по нулевому уровню, сжатие по времени квадратурных составляющих, объединение сжатых квадратурных сигналов, бинарное квантование объединенных сигналов с пороговым уровнем, выбираемым из условия допустимой вероятности превышения его шумовыми выбросами, межпериодное накопление двоичных сигналов за время пачки, обнаружение пачки импульсных эхо-сигналов путем сравнения результата накопления с пороговым уровнем, длительность ТИ зондирующих импульсов и разрядность N кода фазовой манипуляции выбирают из условий


где Rmax - максимальная ожидаемая дальность до цели,
с - скорость света,
ΔR - требуемое разрешение по дальности,
По мере приближения к цели и уменьшения Rmax уменьшают ТИ при сохранении или уменьшении N, одновременно регулируют полосу пропускания приемного устройства в соответствии с соотношением  и уменьшают импульсную мощность зондирующих импульсов пропорционально
и уменьшают импульсную мощность зондирующих импульсов пропорционально  , по значению V собственной скорости носителя радиолокационной станции, измеряемой бортовой системой навигации, вычисляют допплеровскую частоту FД в соответствии с соотношением
, по значению V собственной скорости носителя радиолокационной станции, измеряемой бортовой системой навигации, вычисляют допплеровскую частоту FД в соответствии с соотношением
где ψA, ϑA - углы, определяющие направление оси диаграммы направленности антенны соответственно по азимуту и углу места относительно направления вектора V, затем в дискретные моменты времени с периодом, равным  , сдвигают по фазе в сторону отставания комплексную огибающую бинарно-квантованных сигналов после фазового детектирования на угол
, сдвигают по фазе в сторону отставания комплексную огибающую бинарно-квантованных сигналов после фазового детектирования на угол  , где 2r - число уровней квантования угла 2π, r=2, 3,... - целые числа, и изменяют коэффициент сжатия N1(R) к уровень квантования U(N1) объединенных сжатых сигналов от целей на дальностях R<R0 в соответствии с соотношениями
, где 2r - число уровней квантования угла 2π, r=2, 3,... - целые числа, и изменяют коэффициент сжатия N1(R) к уровень квантования U(N1) объединенных сжатых сигналов от целей на дальностях R<R0 в соответствии с соотношениями
где  - целая часть от
- целая часть от 
 - монотонно возрастающая функция
- монотонно возрастающая функция 
 Nmin>1.
Nmin>1.
В радиолокационную станцию, реализующую указанный способ, содержащую последовательно соединенные синхронизатор, блок перестройки частоты, возбудитель, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно соединенные усилитель высокой частоты, смеситель, усилитель промежуточной частоты, выход которого соединен с сигнальным (первым) входом блока фазовых детекторов, последовательно соединенные блок фазовых детекторов, блок видеоусилителей и блок амплитудных квантователей, а также два идентичных перестраиваемых дискретных фильтра, выходы которых соединены, соответственно, с первым и вторым входами блока объединения квадратур, выход которого соединен с первым входом устройства обработки информации, и блок приводов антенны, выход которого соединен кинематической связью с антенной, причем вход усилителя высокой частоты присоединен к третьему плечу антенного переключателя, гетеродинный вход смесителя и вход напряжения опорной частоты блока фазовых детекторов соединены с соответствующими выходами возбудителя, первый выход - упреждающих импульсов - синхронизатора соединен также с первым входом генератора кода, второй вход которого, объединенный с входами управления записью кодов перестраиваемых дискретных фильтров, подключен к выходу пачек импульсов тактовой частоты синхронизатора, а выход - к входам кода фазового манипулятора и перестраиваемых дискретных фильтров, выход синхроимпульсов синхронизатора соединен через импульсный модулятор с усилителем мощности, а также - с соответствующим входом устройства обработки информации, выход импульсов тактовой частоты синхронизатора соединен с тактовыми входами перестраиваемых дискретных фильтров и устройства обработки информации, а информационный вход последнего подключен к выходу кодов азимута блока приводов антенны, дополнительно введены последовательно соединенные вычислитель допплеровской частоты, преобразователь "код-частота" и компенсатор допплеровской частоты, первый и второй выходы которого соединены соответственно с сигнальными входами первого и второго перестраиваемых дискретных фильтров, а также блок формирования порога, вход импульсов тактовой частоты которого и соответствующий вход преобразователя "код-частота" подключены к соответствующему выходу синхронизатора, информационные выходы кодов азимута и угла места блока приводов антенны и информационный выход блока перестройки частоты подключены к соответствующим входам вычислителя допплеровской частоты, выход сигналов обнуления синхронизатора соединен с соответствующими входами блока формирования порога, устройства обработки информации и перестраиваемых дискретных фильтров, а выходы командных сигналов устройства обработки информации с первого по третий соединены, соответственно, с управляющими входами блока видеоусилителей, синхронизатора и усилителя мощности, при этом блок фазовых детекторов содержит 2r-1 фазовых детекторов, выходы которых через соответствующие 2r-1 видеоусилителей блока видеоусилителей подключены к 2r-1 амплитудным квантователям блока амплитудных квантователей, а выходы последних соединены с соответствующими сигнальными входами компенсатора допплеровской частоты.
Согласно предлагаемому способу обнаружения целей импульсной РЛС предлагается выбирать длительность TИ зондирующих импульсов из условия
где Rmax - максимальная ожидаемая дальность до цели,
а число разрядов N кода ФМ - из соотношения
где ΔR - требуемое разрешение по дальности,
уменьшать длительность зондирующих импульсов по мере приближения к целям и уменьшения Rmax при сохранении (или уменьшении) числа разрядов кода ФМ, одновременно регулировать полосу пропускания приемного устройства в соответствии с соотношением
регулировать импульсную мощность зондирующих сигналов по мере изменения Rmax до целей пропорционально , сдвигать по фазе в сторону отставания периодически - в дискретные моменты времени - комплексную огибающую бинарно-квантованных сигналов после фазового детектирования на угол 
 с периодом, равным , где r=2, 3,... - целые числа,
с периодом, равным , где r=2, 3,... - целые числа,
FД - допплеровская частота, которую определяют из соотношения

где V - собственная скорость носителя РЛС;
ψA, ϑA - углы, определяющие направление оси диаграммы направленности антенны по азимуту и углу места относительно направления вектора V,
в частности, при r=2 - путем круговой коммутации прямых и инвертированных квадратурных составляющих этих сигналов, и изменять коэффициент N1(R) сжатия при согласованной фильтрации, а также уровень U(N1) квантования объединенных сжатых сигналов от целей на дальностях R<R0, где
по правилам
где - ′′целая часть от  Nmin>1
Nmin>1
- монотонно возрастающая функция например 
Приведем необходимые пояснения.
Выполнение условия (1) приводит к выбору максимально возможной длительности ТИ зондирующего импульса при обеспечении временной развязки между передачей и приемом, а следовательно, обеспечит при данной энергии импульса минимизацию его импульсной мощности, т.е. предельную скрытность зондирующего излучения. Соотношения (2) и (3) определяют выбор требуемого разрешения по дальности и полосы приемного устройства, согласованной со спектром радиолокационных импульсов сигналов.
Применение в РЛС сравнительно длинных импульсов при когерентной внутриимпульсной обработке (в частности, при сжатии ФМ-сигналов) приводит к существенному ограничению полосы ΔFД пропускания канала по допплеровской частоте, которая определяется формулой
следующей из выражения для частотной характеристики по частоте Допплера оптимальной внутриимпульсной обработки
справедливой для всех импульсных сигналов с прямоугольной амплитудной огибающей [5].
Поэтому, если не принять специальных мер, для РЛС, установленных на борту движущихся носителей, допплеровский сдвиг частоты FД сигналов, отраженных от целей, может превзойти полуширину полосы 0,5ΔFД, и соответствующие сигналы не будут обнаружены. Это ограничивает выбор длительности ТИ зондирующих импульсов. Для того, чтобы сделать возможным обнаружение эхо-сигналов с большими длительностями ТИ и обеспечить, таким образом, повышение скрытности, предлагается произвести компенсацию фазового сдвига из-за допплеровской частоты FД отраженных сигналов вследствие движения носителя.
С этой целью предлагается, во-первых, вычислять эту допплеровскую частоту, как указано выше, - в соответствии с выражением (4), во-вторых, сдвигать фазу (в сторону запаздывания) принимаемых сигналов по квазилинейному закону, т.е.
 при
при 
где  j=1, 2, 3,...
j=1, 2, 3,...
Таким образом, - на угол  через
через  часть периода
часть периода  допплеровской частоты FД, т.к. при этом аппроксимируется требуемый линейный закон ϕД(t)=ϕ0-2πFДt, соответствующий вычитанию частоты Допплера FД из спектра комплексной огибающей принимаемых сигналов.
допплеровской частоты FД, т.к. при этом аппроксимируется требуемый линейный закон ϕД(t)=ϕ0-2πFДt, соответствующий вычитанию частоты Допплера FД из спектра комплексной огибающей принимаемых сигналов.
Оценим, к каким энергетическим потерям ведет предлагаемая ступенчатая аппроксимация (9) линейного фазового сдвига ϕД(t).
Выражение для отношения сигнал/шум по напряжению после сжатия и объединения квадратурных составляющих имеет вид

где

- квадратурные составляющие сигнала до сжатия, причем ϕ(t) в (11) выражается в виде (9), ti=t0+iτИ, i=1,2,..., N.
Далее, в момент согласования весовые коэффициенты hi фильтров сжатия в квадратурах и кодовые символы qi=±1 ФМ-видеосигналов согласованы, так что hN-iqi=1 при i=1,2,..., N.
В идеальном случае, когда ϕД(t)=ϕ0-2πFДt, подставляя ϕД(ti) вместо ϕ(ti) в (11), получим
В случае предлагаемой ступенчатой аппроксимации (9) получим из (10), (11), как нетрудно видеть, выражение

откуда после несложных преобразований

Значения коэффициента , определяющие потери из-за дискретности предлагаемого закона (9) по сравнению с идеальным, приведены в таблице
, определяющие потери из-за дискретности предлагаемого закона (9) по сравнению с идеальным, приведены в таблице
Таким образом, уже при r=2 потери в энергии из-за аппроксимации линейного закона изменения фазы согласно (9) не превосходят 1 дБ.
Регулирование импульсной мощности зондирующих сигналов в режимах обнаружения и сопровождения по мере уменьшения соответственно ожидаемой или измеряемой дальности до цели позволяет обеспечить предельную скрытность зондирующего излучения. При этом следует иметь в виду, что по мере приближения к цели длительность TИ зондирующих импульсов предлагается уменьшать пропорционально уменьшению дальности, поэтому для обеспечения минимально необходимого обнаружения отношения сигнал/шум предлагается регулировать импульсную мощность зондирующих сигналов пропорционально кубу ожидаемого значения дальности до целей. Наконец, при уменьшении дальности до целей до значений R<R0 предлагается обеспечить согласование параметров обработки - оптимальной фильтрации - с усеченными принимаемыми сигналами вследствие их частичного наложения на зондирующие сигналы.
При этом коэффициент сжатия усеченных принимаемых сигналов определяется выражением (6), и для достижения согласования этих сигналов с фильтром сжатия целесообразно изменять его длину в зоне, где R<R0, пропорционально текущей дальности. При этом дисперсия шумов после сжатия уменьшается, и поэтому целесообразно уменьшать также уровень U квантования объединенных сжатых сигналов на дальностях R<R0 так, чтобы вероятность его превышения шумовыми выбросами оставалась постоянной, при этом обеспечивается дополнительное повышение помехозащищенности РЛС в этой области.
Для того, чтобы найти требуемый закон изменения порогового уровня при R<R0, определим вероятности превышения его при наличии и отсутствии сигнала, т.е. PСШ и РШ соответственно.
Предполагая, что амплитуда U0 принимаемого сигнала распределена по закону Рэлея, а начальная фаза - по равномерному закону в интервале  , получим для плотности распределения процесса после сжатия при объединении квадратур по правилу "корень квадратный из суммы квадратов"
, получим для плотности распределения процесса после сжатия при объединении квадратур по правилу "корень квадратный из суммы квадратов"

где х>0,  , причем
, причем  - отношение сигнал/шум (по мощности) до сжатия.
- отношение сигнал/шум (по мощности) до сжатия.
При объединении квадратур по правилу "сумма квадратов" получим  , где y>0.
, где y>0.
Соответственно, для вероятностей превышения уровней х0 и у0 при наличии и отсутствии сигналов получим
 ,
,  , так что
, так что - в первом случае,
- в первом случае,
 ,
,  , причем
, причем  - во втором случае.
- во втором случае.
Таким образом, характеристики обнаружения в обоих случаях одинаковы, но пороговый уровень в первом случае выбирается из соотношения  , а во втором случае - из соотношения
, а во втором случае - из соотношения  .
.
Поэтому, в зависимости от правила объединения квадратур, пороговый уровень в области R<R0 должен быть линейной или квадратичной функцией квадратного корня из коэффициента сжатия N1≤N.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
- фиг.1 - структурная схема РЛС, реализующей заявляемый способ;
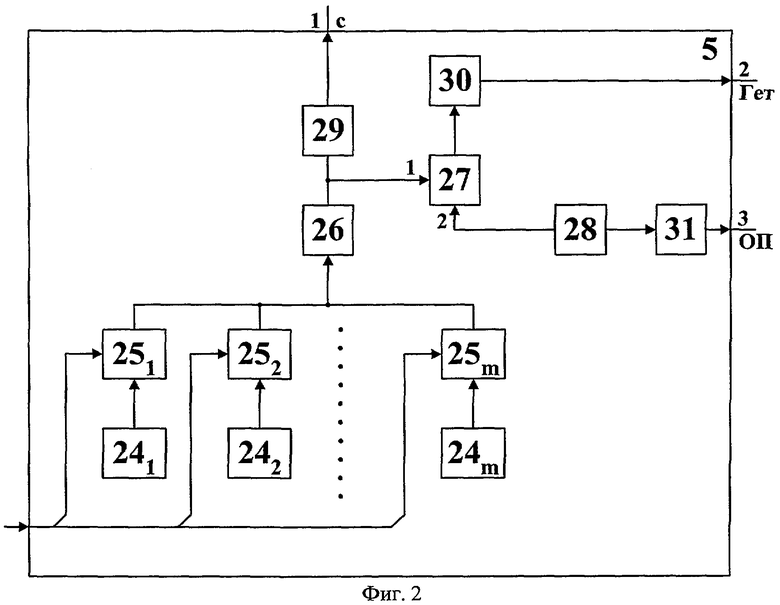
- фиг.2 - структурная схема возбудителя (В) передатчика;
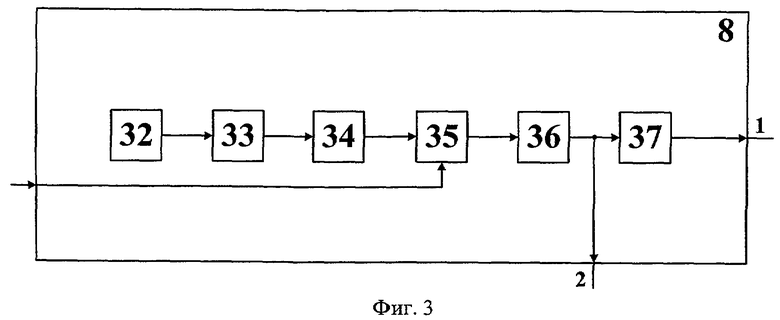
- фиг.3 - структурная схема блока перестройки частоты (БПЧ);
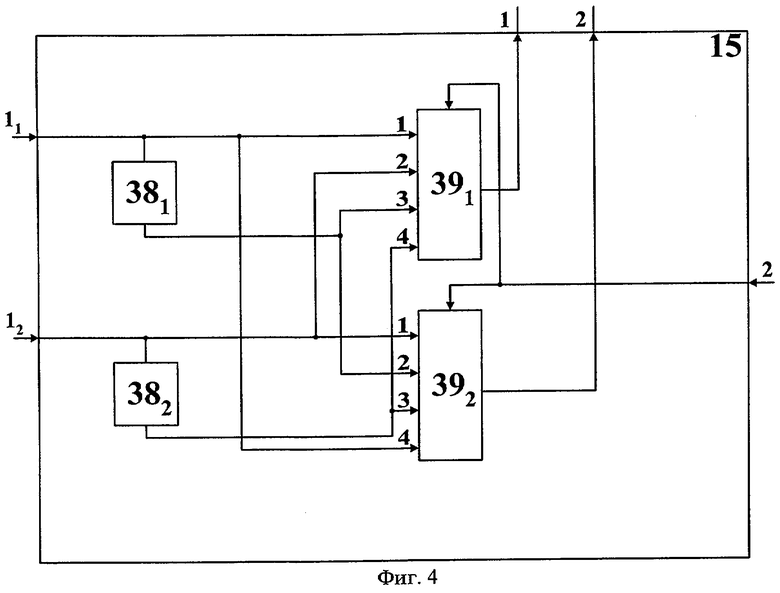
- фиг.4 - структурная схема компенсатора допплеровской частоты (КДЧ);
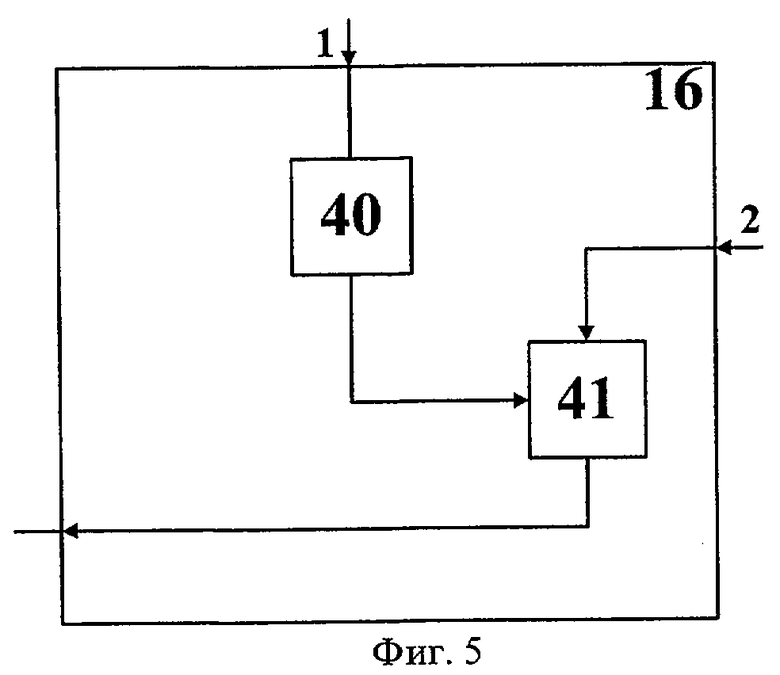
- фиг.5 - структурная схема преобразователя "код-частота" (ПКЧ);
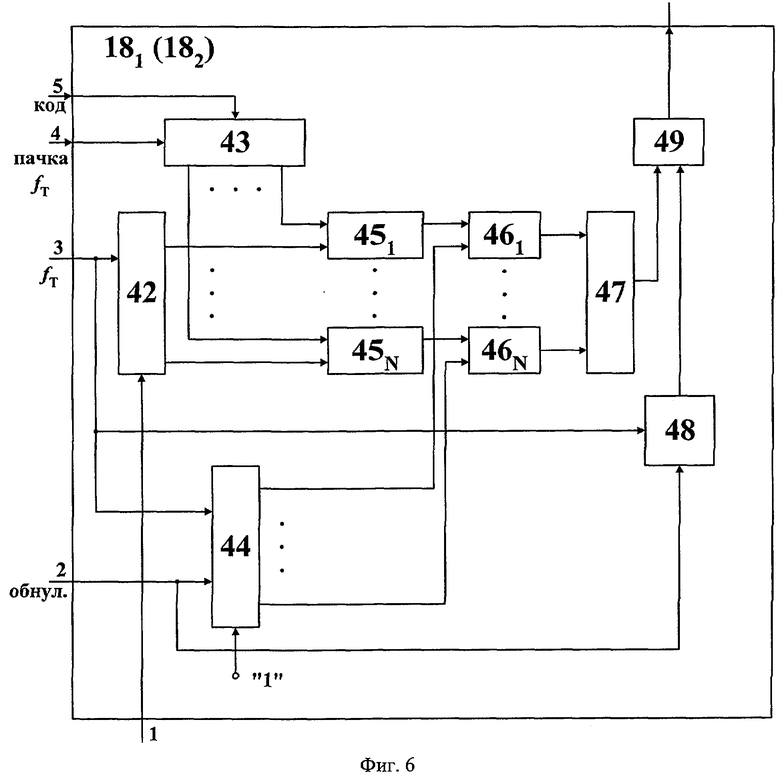
- фиг.6 - структурная схема перестраиваемых дискретных фильтров (ПДФ);
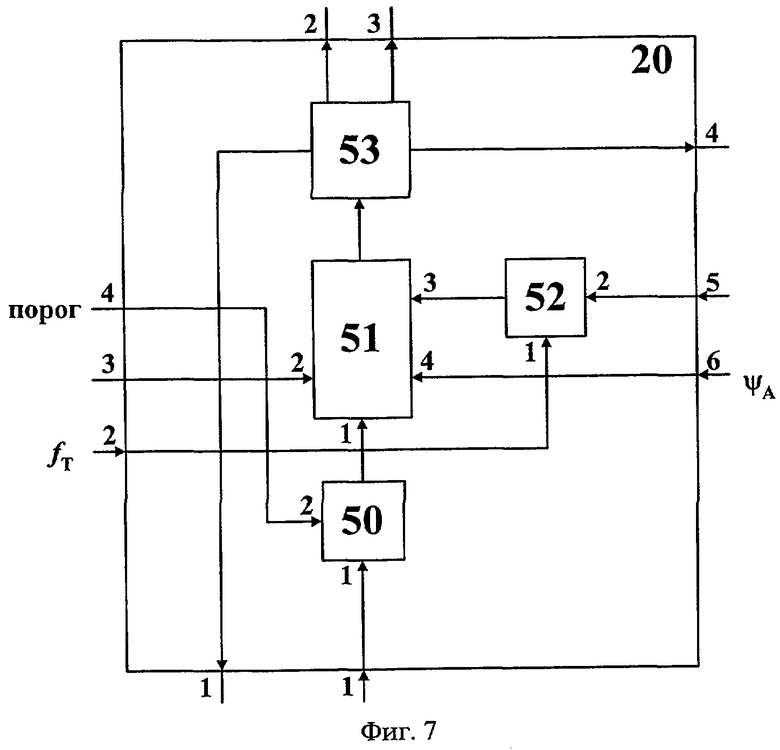
- фиг.7 - структурная схема устройства обработки информации (УОИ);
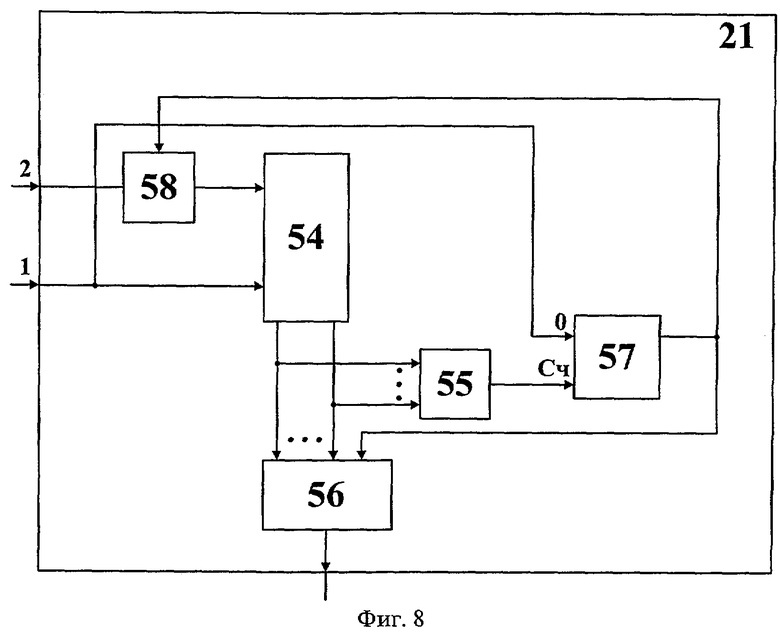
- фиг.8 - структурная схема блока формирования порога (БФП);
- фиг.9 - структурная схема блока первичной обработки (БПО);
- фиг.10 - осциллограммы сигналов на выходах синхронизатора (С);
- фиг.11 - структурная схема синхронизатора.
На фиг.1 приняты следующие обозначения:
1 - антенна (А);
2 - антенный переключатель (АП), который может быть выполнен в виде ферритового Y-циркулятора;
3 - усилитель мощности (УМ), представляющий собой СВЧ-усилитель с импульсной модуляцией, реализуемый в зависимости от требуемой мощности и полосы усиливаемых частот на основе электровакуумного прибора (амплитрон, лампа бегущей волны, многолучевой клистрон и т.д.) или полупроводникового прибора (транзистор) - см., например, [6], стр.19-52. Управление мощностью УМ 3 может осуществляться, например, введением управляемого затухания в цепь возбуждения или коммутацией в выходных цепях;
4 - фазовый манипулятор (ФМ), который может быть выполнен по схеме, приведенной в описании к патенту США № 4338604 [3], причем в качестве линии задержки может использоваться отрезок полоскового волновода, коммутируемый СВЧ-диодами, которые управляются импульсами, поступающими от генератора кода (см. ниже);
5 - возбудитель (В), структурная схема которого представлена на фиг.2;
6 - импульсный модулятор (ИМ), который, в зависимости от схемы УМ, может быть реализован по одной из схем, приведенных в [6], стр.103-107, рис.43-45;
7 - перестраиваемый генератор кода (ГК), который может быть выполнен по схеме, приведенной в описании к патенту № 2039365 [4];
8 - блок перестройки частоты (БПЧ), структурная схема которого приведена на фиг.3;
9 - усилитель высокой частоты (УВЧ), реализуемый в виде малошумящего транзисторного СВЧ-усилителя;
10 - смеситель (СМ), выполненный в виде балансного смесителя;
11 - усилитель промежуточной частоты (УПЧ);
12 - блок фазовых детекторов (БФД), состоящий в общем случае из 2r-1 идентичных фазовых детекторов, на которые подается опорное напряжение со сдвигами фаз на  на последующей относительно предыдущего, в частности, при r=2 БФД состоит из двух идентичных фазовых детекторов, на которые опорное напряжение подается со сдвигом фаз на
на последующей относительно предыдущего, в частности, при r=2 БФД состоит из двух идентичных фазовых детекторов, на которые опорное напряжение подается со сдвигом фаз на  (на один относительно другого);
(на один относительно другого);
13 - блок из 2r-1 (в общем случае) идентичных видеоусилителей, полоса которых может изменяться по управляющему сигналу, например, путем коммутации конденсаторов, определяющих частоту среза частотной характеристики (в частности, при r=2 БФД состоит из двух идентичных видеоусилителей);
14 - блок из 2r-1 (в общем случае) амплитудных квантователей (БАК), осуществляющих амплитудное квантование сигналов и шумов, поступающих на их входы по нулевому пороговому уровню на две градации - например, 1 или 0 (в частности, при r=2 БАК состоит из двух идентичных амплитудных квантователей);
15 - компенсатор допплеровской частоты (КДЧ), структурная схема которого приведена на фиг.4 (для наглядности, для случая r=2);
16 - преобразователь "код-частота" (ПКЧ), структурная схема которого приведена на фиг.5;
17 - вычислитель допплеровской частоты (ВДЧ), который выполняет расчеты допплеровской частоты по формуле

по известным значениям скорости V носителя РЛС, получаемым от бортовой навигационной системы, частоты fС зондирующего излучения и углов ψA и ϑA, получаемым от блока 8 перестройки частоты и блока 22 приводов антенны (см. ниже) соответственно;
181, 182 - идентичные перестраиваемые дискретные фильтры (ПДФ), структурная схема которых приведена на фиг.6;
19 - блок объединения квадратур (БОК);
20 - устройство обработки информации (УОИ), структурная схема которого приведена на фиг.7;
21 - блок формирования порога (БФП), структурная схема которого приведена на фиг.8;
22 - синхронизатор (С), структурная схема которого приведена на фиг.11, а на фиг.10 приведены осциллограммы сигналов на выходах синхронизатора;
23 - блок приводов антенны (БП), состоящий из привода азимута, привода угла места и соответствующих датчиков.
На схеме по фиг.1 последовательно соединены синхронизатор 22, блок 8 перестройки частоты, возбудитель 5, фазовый манипулятор 4, усилитель 3 мощности, антенный переключатель 2 и антенна 1, последовательно соединены усилитель 9 высокой частоты, смеситель 10, усилитель 11 промежуточной частоты, последовательно соединены блок 12 фазовых детекторов, блок 13 видеоусилителей, блок 14 амплитудных квантователей и компенсатор 15 допплеровской частоты, вход управления которого через преобразователь 16 "код-частота" соединен с выходом вычислителя 17 допплеровской частоты, а первый и второй выходы - с первыми входами перестраиваемых дискретных фильтров 181, 182 соответственно, выходы которых подключены к соответствующим входам блока 19 объединения квадратур, а выход последнего соединен с первым входом устройства 20 обработки информации.
Вход усилителя 9 высокой частоты присоединен к третьему плечу антенного переключателя 2, гетеродинный вход смесителя 10 и вход напряжения опорной частоты блока 12 фазовых детекторов соединены с соответствующими (вторым и третьим) выходами возбудителя 5, вход управления полосой блока 13 видеоусилителей соединен с первым выходом устройства 20 обработки информации, второй и третий выходы которого соединены с входами управления синхронизатора 22 и усилителя 3 мощности соответственно.
Второй вход (импульсов модуляции) усилителя 3 мощности соединен с выходом импульсного модулятора 6, вход которого и пятый вход устройства 20 обработки информации соединены с пятым выходом синхронизатора 22.
К первому выходу синхронизатора 22 подключен первый вход генератор 7 кода, к выходу которого подключены управляющий вход фазового манипулятора 4 и кодовые (пятые) входы перестраиваемых дискретных фильтров 181 и 182. Ко второму выходу синхронизатора 22 подключены четвертые входы перестраиваемых дискретных фильтров 181 и 182 и второй вход генератора 7 кодов.
Третий выход синхронизатора 22, на котором формируется последовательность импульсов тактовой частоты, соединен со вторым управляющим входом преобразователя 16 "код-частота", со вторыми входами устройства 20 обработки информации и блока 21 формирования порога, а также с третьими входами ПДФ 181 и 182. Четвертый выход синхронизатора 22 соединен с третьим входом устройства 20 обработки информации непосредственно и - через блок 21 формирования порога - с его четвертым входом, а также - со вторыми входами перестраиваемых дискретных фильтров 181 и 182.
Шестой вход (кодов азимута) устройства 20 обработки информации и первый информационный вход вычислителя 17 допплеровской частоты подключены к первому информационному выходу блока 23 приводов антенны, второй информационный выход (кодов угла места) которого соединен со вторым входом вычислителя 17 допплеровской частоты, на третий вход которого подаются значения скорости V носителя от бортовой системы навигации. Четвертый вход вычислителя 17 допплеровской частоты соединен с информационным выходом блока 8 перестройки частоты.
Кинематический выход блока 23 приводов соединен с входом управления антенной 1. Четвертый выход устройства 20 обработки информации представляет информационный выход РЛС.
На фиг.2 представлена схема возбудителя 5, где обозначено:
241,..., 24m - кварцевые генераторы (КГ1,..., КГm);
251,..., 25m - стробируемые усилители (Ус1,... Усm);
26 - умножитель частоты (Умн);
27 - смеситель (См);
28 - генератор колебаний опорной частоты (ГОП);
29 - усилитель колебаний частоты сигнала (Усc);
30 - усилитель колебаний гетеродинной частоты (Усг);
31 - усилитель колебаний опорной частоты (Усоп).
На фиг.2 кварцевые генераторы 241,..., 24m соединены через соответствующие стробируемые усилители 251,..., 25m, управляющие входы которых образуют вход возбудителя 5, с входом умножителя 26 частоты. Выход умножителя 26 частоты через усилитель 29 соединен с первым выходом (колебаний частоты fС сигнала) возбудителя 5, а также непосредственно с входом смесителя 27, второй выход которого через усилитель 30 колебаний гетеродинной частоты соединен со вторым выходом возбудителя 5. Ко второму входу смесителя 27 подключен первый выход генератора 28 колебаний опорной частоты, причем второй выход последнего через усилитель 31 колебаний опорной частоты соединен с третьим выходом возбудителя 5.
На фиг.3 представлена структурная схема блока 8 перестройки частоты, где обозначено:
32 - генератор шума (ГШ);
33 - усилитель-ограничитель (УО);
34 - счетчик (Сч);
35 - блок элементов И;
36 - регистр (Р);
37 - дешифратор (Дш).
На фиг.3 управляющий вход блока 35 элементов И является входом блока 8 перестройки частоты, а его сигнальные входы соединены с соответствующими выходами счетчика 34, к входу которого через усилитель-ограничитель 33 подключен выход генератора 32 шума. Выходы блока 35 поразрядно соединены с регистром 36, выходы которого подключены к первому выходу блока 8 перестройки частоты через дешифратор 37, а ко второму выходу блока 8 - непосредственно.
На фиг.4 представлена структурная схема компенсатора 15 допплеровской частоты для случая r=2, т.е. когда угол 2π квантуется на 2r=4 уровня, где обозначено:
381, 382 - инверторы (ИНВ1, ИНВ2);
391, 392 - коммутаторы (K1, К2).
На фиг.4 первый сигнальный вход компенсатора 15 допплеровской частоты соединен с первым входом первого коммутатора 391 и четвертым входом второго коммутатора 392 непосредственно, а с третьим входом первого коммутатора 391 и вторым входом второго коммутатора 392 - через первый инвертор 381. Второй сигнальный вход компенсатора 15 допплеровской частоты соединен со вторым входом первого коммутатора 391 и первым входом второго коммутатора 392 непосредственно, а с четвертым входом первого коммутатора 391 и третьим входом второго коммутатора 392 - через второй инвертор 382. Выходы первого и второго коммутаторов 391, 392 образуют соответственно первый и второй выходы компенсатора 15 допплеровской частоты. Управляющие входы коммутаторов 391 и 392 подключены к входу управления КДЧ 15.
В общем случае компенсатор 15 допплеровской частоты имеет
2r-1 сигнальных входов, 2r-1 инверторов 381,..., 382 r-1, а каждый из коммутаторов 391, 392 имеет 2r входов (1, 2,..., 2r). Ниже представлены соответствующая таблица соединений входов компенсатора 15 с входами коммутаторов 391, 392 - непосредственно или через инверторы (в последнем случае это отмечается сокращением "инв").
На фиг.5 представлена структурная схема преобразователя 16 "код-частота", где обозначено:
40 - дешифратор коэффициента деления;
41 - управляемый делитель.
На фиг.5 первый вход преобразователя 16 "код-частота" соединен с управляющим входом управляемого делителя 41 через дешифратор 40, сигнальный вход управляемого делителя 41 образует второй вход преобразователя 16, а выход делителя 41 - выход преобразователя 16 "код-частота".
На фиг.6 представлена структурная схема перестраиваемых дискретных фильтров (ПДФ) 181, 182, где обозначено:
42 - регистр сдвига сигнала (PC1);
43 - регистр сдвига кодов (РС2);
44 - регистр сдвига сигнала логической "1" (РС3)
451,..., 45N - сумматоры по модулю "2" (СМ2);
461,..., 46N - элементы И-НЕ;
47 - многовходовый сумматор (МС);
48 - счетчик;
49 - блок вычитания.
На схеме фиг.6 сигнальный вход регистра 42 сдвига сигнала образует первый вход перестраиваемого дискретного фильтра 181 (182). Вход обнуления регистра 44 сдвига сигнала логической "1" соединен с входом обнуления счетчика 48 и образует второй вход перестраиваемого дискретного фильтра 181 (182). Третий вход ПДФ 181 (182) подключен к тактовым входам регистра 42 сдвига сигналов, регистра 44 сдвига сигнала логической "1" и счетчика 48. Выходы всех N разрядов регистра 42 сдвига сигналов соединены с первыми входами соответствующих сумматоров 451,..., 45N по модулю "2", их вторые входы соединены с соответствующими выходами N разрядов регистра 43 сдвига кодов, сигнальный вход которого образует пятый вход ПДФ 181 (182), а тактовый вход регистра 43 сдвига сигналов является четвертым входом ПДФ 181 (182). Выходы всех N сумматоров 451,..., 45N соединены с первыми входами элементов И-НЕ 461,..., 46N, вторые входы которых соединены с соответствующими выходами регистра 44 сдвига сигналов логической "1", сигнальный вход которого соединен с шиной логической "1".
Выходы элементов И-НЕ 461,..., 46N соединены с соответствующими входами многовходового сумматора 47, выход которого соединен с входом уменьшаемого блока 49 вычитания. Вход вычитаемого блока 49 вычитания соединен с выходом счетчика 48, а выход блока 49 вычитания образует выход перестраиваемого дискретного фильтра 181 (182).
На фиг.7 представлена структурная схема устройства 20 обработки информации, где обозначено:
50 - блок сравнения с порогом (БСП);
51 - блок первичной обработки (БПО);
52 - ключ (Кл);
53 - блок вторичной обработки (БВО).
На схеме фиг.7 первый вход УОИ 20 через блок 50 сравнения с порогом соединен с первым - сигнальным - входом блока 51 первичной обработки, второй вход которого соединен с третьим входом - обнуляющего сигнала - устройства 20 обработки информации, четвертый вход которого является управляющим входом блока 50 сравнения с порогом. Второй вход устройства 20 обработки информации - тактирующих импульсов - соединен через ключ 52 с третьим входом блока 51 первичной обработки, управляющий вход ключа 52 образует пятый вход устройства 20, а четвертый вход блока 51 первичной обработки является шестым входом - значений азимута - устройства 20. Выход блока 51 первичной обработки соединен с сигнальным входом блока 53 вторичной обработки, а выходы последнего с первого по четвертый образуют соответствующие выходы устройства 20 обработки информации.
На фиг.8 представлена структурная схема блока 21 формирования порога, где обозначено:
54 - счетчик (Сч);
55 - дешифратор (Дш);
56 - блок памяти (БП);
57 - триггер (Тг);
58 - ключ (Кл).
На схеме фиг.8 первый вход блока 21 формирования порога является входом установки в нуль счетчика 54, его выходы поразрядно соединены с соответствующими входами дешифратора 55 и входами младших разрядов блока 56 памяти, старший разряд которого соединен с выходом триггера 57, а счетный вход последнего соединен с выходом дешифратора 55. Выход триггера 57 соединен также с управляющим входом ключа 58, информационный вход которого является вторым входом блока 21, а выход соединен со счетным входом счетчика 54. Первый вход блока 21 соединен также с обнуляющим входом триггера 57, а выход блока 56 памяти является выходом блока 21 формирования порога.
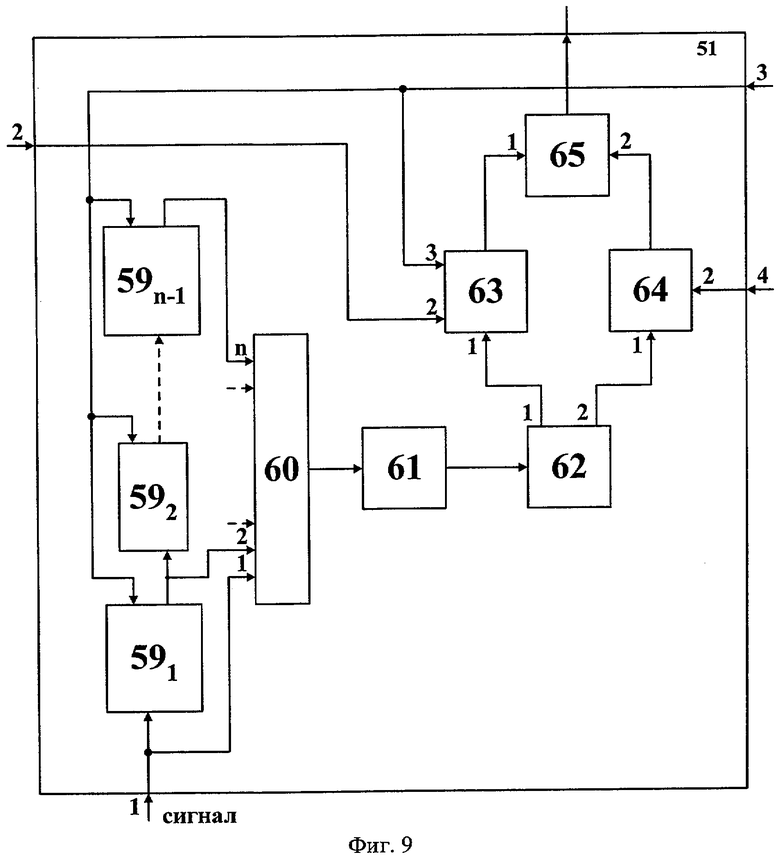
На фиг.9 представлена структурная схема блока 51 первичной обработки, где обозначено:
591,..., 59n-1 - регистры сдвига (PC1,..., PCn-1);
60 - многовходовый сумматор (МС);
61 - цифровой компаратор (ЦК);
62 - блок опроса (БО);
63 - измеритель дальности (ИД);
64 - измеритель азимута (ИА);
65 - оперативное запоминающее устройство целей (ОЗУЦ).
На фиг.9 n-1 регистров 591,..., 59n-1 сдвига соединены последовательно, вход первого регистра 591 сдвига соединен с первым входом многовходового сумматора 60 и одновременно является первым входом блока 51 первичной обработки, входы регистров 592,..., 59n-1 соединены соответственно с входами со второго по n-1-й, многовходового сумматора 60, n-й вход которого соединен с выходом регистра 59n-1.
Тактовые входы всех регистров 591,..., 59n-1 сдвига объединены между собой и образуют третий вход блока 51 первичной обработки. Выход многовходового сумматора 60 через цифровой компаратор 61 соединен с входом блока 62 опроса, первый и второй выходы которого соединены через измеритель 63 дальности и измеритель 64 азимута соответственно с первым и вторым входами оперативного запоминающего устройства 65 целей, выход которого является выходом блока 51 первичной обработки. Второй и третий входы измерителя 63 дальности соединены соответственно с одноименными входами блока 51, а второй вход измерителя 64 азимута является четвертым входом блока 51 первичной обработки.
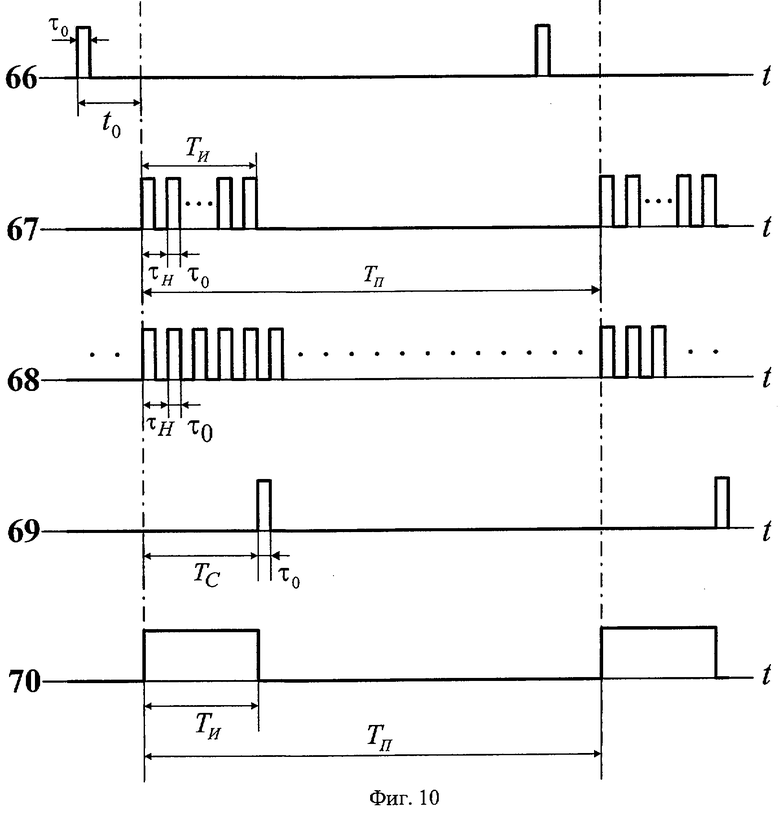
На фиг.10 представлены осциллограммы сигналов на выходах синхронизатора 22, где обозначено:
66 - осциллограмма импульсов управления блоком 8 перестройки частоты и генератором 7 кода с длительностью  τ0 и упреждением t0 относительно начала периода повторения зондирующих импульсов, причем τ0≪t0, t0≪TП - на первом выходе синхронизатора 22;
τ0 и упреждением t0 относительно начала периода повторения зондирующих импульсов, причем τ0≪t0, t0≪TП - на первом выходе синхронизатора 22;
67 - осциллограммы пачек импульсов с длительностью пачки ТИ, периодом следования импульсов τИ≪TИ, длительностью импульсов τ0≪τИ и периодом повторения пачек ТП - для управления генератором 7 кода и перестраиваемыми дискретными фильтрами 181, 182 - на втором выходе синхронизатора 22;
68 - осциллограммы последовательностей импульсов с периодом следования τИ≪TИ и длительностью импульсов τ0≪τИ - для управления преобразователем 16 "код-частота", перестраиваемыми дискретными фильтрами 181 и 182, устройством 20 обработки информации и блоком 21 формирования порога - на третьем выходе синхронизатора 22;
69 - осциллограммы периодических импульсов с периодом ТП, запаздыванием TИ относительно начала периода повторения и длительностью τ0≪TИ - сигналов обнуления для управления перестраиваемыми дискретными фильтрами 181, 182, устройством 20 обработки информации и блоком 21 формирования порога - на четвертом выходе синхронизатора 22;
70 - осциллограммы периодических импульсов с периодом TП, передний фронт которых является началом периода повторения, и длительностью ТИ<ТП - для управления импульсным модулятором 6 и устройством 20 обработки информации - на пятом выходе синхронизатора 22.
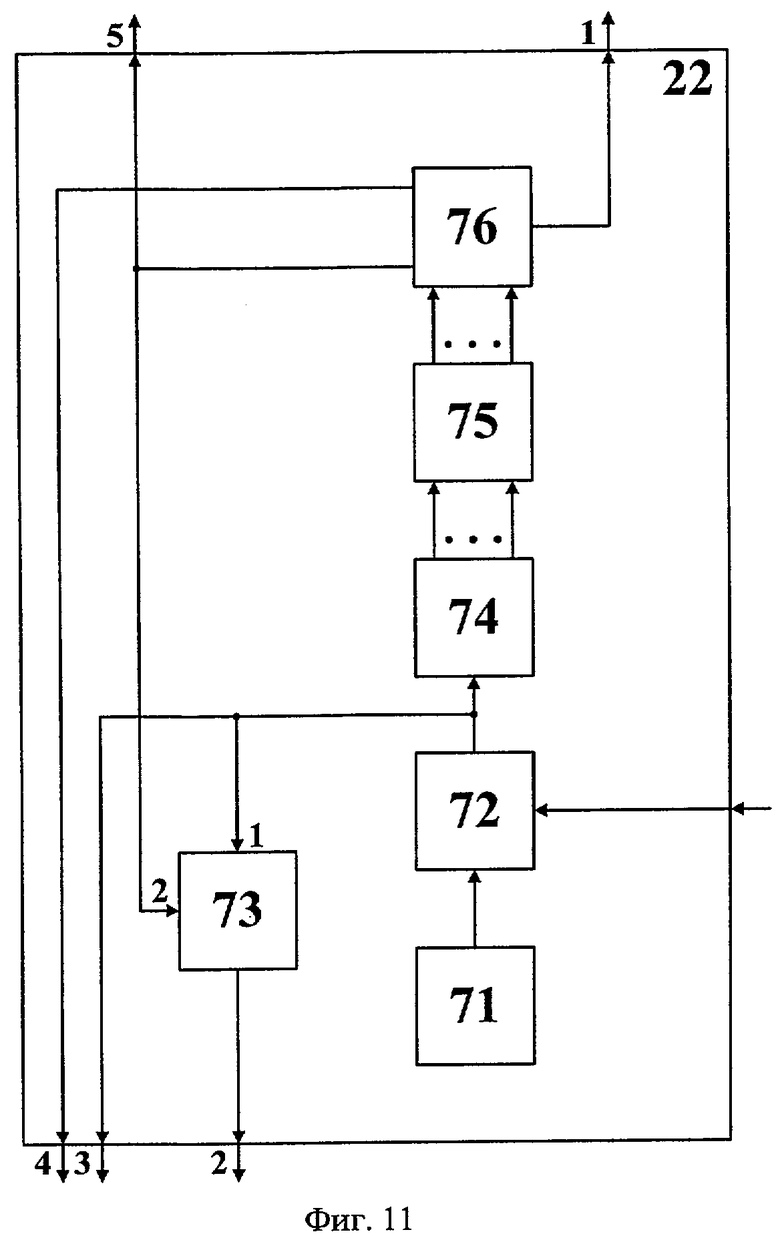
На фиг.11 представлена структурная схема синхронизатора 22, где обозначено:
71 - генератор тактирующих импульсов (ГТИ);
72 - управляемый делитель (ДУ);
73 - ключ (Кл);
74 - счетчик (Сч);
75 - дешифратор (Дш);
76 - блок триггеров (БТг).
На схеме фиг.11 последовательно соединены генератор 71 тактирующих импульсов, управляемый делитель 72 и счетчик 74. Выходы счетчика 74 через дешифратор 75 поразрядно соединены с входами блока 76 триггеров. Вход управляемого делителя 72 является входом синхронизатора 22, выход управляемого делителя 72 через ключ 73 соединен со вторым выходом синхронизатора 22 и непосредственно - с третьим его выходом. Первый, четвертый и пятый выходы синхронизатора 22 соединены с выходами блока 76 триггеров, причем последний выход соединен также с управляющим входом ключа 73.
В соответствии со структурной схемой фиг.1 РЛС, реализующая заявляемый способ, работает следующим образом.
Возбудитель 5 передатчика генерирует непрерывные колебания частоты сигнала fCi, гетеродина fГi и опорные колебания промежуточной частоты fпч, при этом частоты fCi, fГi высоко стабильны в течение одного периода повторения TП зондирующих импульсов, но могут меняться скачком от периода к периоду по случайному закону под действием сигналов от блока 8 перестройки частоты, принимая одно из m значений (r=1, 2,..., m), причем так, что всегда выполняется соотношение |fCi-fГi|=fпч.
Возбудитель 5 работает следующим образом (фиг.2).
Кварцевые генераторы 241,..., 24m генерируют непрерывные колебания стабильных частот f1, f2,..., fm соответственно, эти колебания усиливаются стробируемыми усилителями 251,..., 25m соответственно, из которых в течение каждого периода повторения лишь один открыт, а остальные закрыты - в соответствии с управляющим кодом, поступающим на входы управления усилителей 251,..., 25m через вход возбудителя 5 от блока 8 перестройки частоты. Колебания частоты fi через открытый усилитель 25i поступают на умножитель 26 частоты, где умножаются до частоты fCi, колебания частоты fCi усиливаются в усилителе 29 и приходят на первый выход возбудителя 5, а также поступают на вход смесителя 27, на другой вход которого поступают колебания промежуточной частоты fпч, генерируемые генератором 28 колебаний опорной частоты. Колебания гетеродинной частоты fГi, образующиеся в смесителе 27, усиливаются в усилителе 30 и поступают на второй выход возбудителя, а колебания опорной частоты, равной промежуточной, проходят через усилитель 31 на третий выход возбудителя 5.
Перестройка частот fCi и fГi производится с помощью блока 9 перестройки частоты (БПЧ), работающего следующим образом (фиг.3).
Генератор 32 шума, построенный, например, на основе шумового диода, генерирует шумовой сигнал с шириной спектра, значительно превосходящей частоту повторения  , далее, эти колебания усиливаются и ограничиваются в усилителе-ограничителе 33 и поступают на счетчик 34, который осуществляет счет, например, положительных фронтов по модулю m и имеет, таким образом, m равновероятных состояний. В момент, определяемый синхроимпульсами, поступающими через период повторения ТП с первого выхода синхронизатора 22 (66, фиг.11) с упреждением на время t0 относительно начала следующего периода, показания счетчика 34 через элемент "И" БЭИ 35 записываются в регистр 36 и преобразуются в дешифраторе 37 в параллельный m-разрядный код с одним ненулевым разрядом, который сохраняется в течение всего периода повторения и определяет значения fCi и fГi в следующем периоде. Одновременно код частоты fCi с выхода регистра 36 поступает на второй выход блока 8 перестройки частоты.
, далее, эти колебания усиливаются и ограничиваются в усилителе-ограничителе 33 и поступают на счетчик 34, который осуществляет счет, например, положительных фронтов по модулю m и имеет, таким образом, m равновероятных состояний. В момент, определяемый синхроимпульсами, поступающими через период повторения ТП с первого выхода синхронизатора 22 (66, фиг.11) с упреждением на время t0 относительно начала следующего периода, показания счетчика 34 через элемент "И" БЭИ 35 записываются в регистр 36 и преобразуются в дешифраторе 37 в параллельный m-разрядный код с одним ненулевым разрядом, который сохраняется в течение всего периода повторения и определяет значения fCi и fГi в следующем периоде. Одновременно код частоты fCi с выхода регистра 36 поступает на второй выход блока 8 перестройки частоты.
Колебания частоты сигнала fCi поступают в фазовый манипулятор 4, где манипулируются по фазе на уровне 0π двоичным многоразрядным кодом (число разрядов N), формируемым в перестраиваемом генераторе 7 кода. Работа генератора 7 кода, построенного в соответствии с генератором кода, описанным в прототипе [4], происходит точно так же, как в [4]. Далее, колебания усиливаются по мощности в усилителе 3 мощности, формирующем под действием импульсного модулятора 6, управляемого синхронизатором 22 и устройством 20 обработки информации зондирующие импульсы с длительностью ТИ с внутриимпульсной фазовой манипуляцией (ФМ) N разрядным двоичным кодом, перестраиваемым от периода к периоду повторении Тn. Зондирующие импульсы, образованные в усилителе 3 мощности передатчика, проходят через антенный переключатель 2 в антенну 1 и излучаются в пространство.
При этом длительность ТИ зондирующих импульсов и число разрядов кода N ФМ выбираются из соотношений (1) и (2) соответственно, а мощность в импульсе устанавливается максимальной - для обнаружения целей на максимальной дальности. Блок 23 приводов антенны работает автономно, обеспечивая обзор пространства.
Принимаемые сигналы, проходя через антенный переключатель 2, попадают в усилитель 9 высокой частоты и после усиления - в смеситель 10, на гетеродинный вход которого поступают колебания гетеродинной частоты из возбудителя 5. Сигналы промежуточной частоты, образующиеся в смесителе 10, усиливаются, далее, в усилителе 11 промежуточной частоты и приходят на фазовые детекторы блока 12, на которые в качестве колебаний опорной частоты поступают колебания промежуточной частоты из возбудителя 5.
Блок 12 фазовых детекторов состоит из 2r-1 идентичных фазовых детекторов, на которые подаются опорные напряжения со сдвигом  - на последующий относительно предыдущего (в частности, при r=2 БФД состоит из двух фазовых детекторов со сдвигом фаз по опорному напряжению на
- на последующий относительно предыдущего (в частности, при r=2 БФД состоит из двух фазовых детекторов со сдвигом фаз по опорному напряжению на  ), поэтому на выходах БФД 12 образуются
), поэтому на выходах БФД 12 образуются
2r-1 сигналов Sl(t), l=1, 2,..., 2r-1, имеющих вид
a(t-tR)cos[2πFДt+ψ(t-tR)+ϕ],



где a(t), ψ(t) - функции амплитудной и фазовой модуляции (манипуляции) сигналов,
 - задержка, соответствующая дальности R до цели,
- задержка, соответствующая дальности R до цели,
ϕ - начальный сдвиг фаз между колебаниями принимаемых сигналов и опорными колебаниями, причем


здесь NτИ=ТИ, υi=1 или 0 - код ФМ.
Эти сигналы проходят через соответствующие последовательно соединенные видеоусилители блока 13 и амплитудные квантователи блока 14, где квантуются на 2 градации (0 или 1) по нулевому пороговому уровню, квантованные сигналы передаются на соответствующий сигнальный вход 2r-1 канального компенсатора 15 допплеровской частоты, в котором (фиг.4) непосредственно и через инверторы 381,..., 382 r-1 (на фиг.4 r=2) поступают на 2r - входовые коммутаторы 391, 392, на которые в качестве управляющих (коммутирующих) сигналов поступают с выхода преобразователя 16 "код-частота" импульсы с периодом, равным , т.е. составляющим периода допплеровской частоты, соответствующей радиальной составляющей скорости носителя РЛС в направлении на цель, наблюдаемую в данный момент.
Для формирования этих импульсов значения допплеровской частоты FД, рассчитанные по формуле (4) в вычислителе 17 допплеровской частоты по значениям азимута и угла места антенны, поступающим с информационных выходов блока 23 приводов антенны, скорости V носителя, поступающей из бортовой навигационной системы, и значения частоты сигналов fCi в данный момент, приходящего на вычислитель 17 из блока 8 перестройки частоты, передаются на первый вход преобразователя 16 "код-частота", в котором они проходят через дешифратор 40 (см. фиг.5) и далее преобразуются в управляемом делителе 41 с частотой повторения импульсов  , поступающих на второй вход управляемого делителя 41 с третьего выхода (68 на фиг.11) синхронизатора 22.
, поступающих на второй вход управляемого делителя 41 с третьего выхода (68 на фиг.11) синхронизатора 22.
В результате на выходе преобразователя 16 "код-частота" образуются импульсы с требуемой частотой 2rFД, управляющие коммутаторами 391, 392 в компенсаторе 15 допплеровской частоты. Под действием этих импульсов коммутаторы 391, 392 синхронно подключают соответствующие свои входные контакты 1, 2,..., 2r к своим выходам.
На многоканальном сигнальном входе компенсатора 15 образуются случайные процессы после амплитудного квантования в блоке 14 по правилу (с учетом последующего вычитания  в ПДФ 18)
в ПДФ 18)

где εl(t)=nl(t)+sl(t), причем nl(t) - нормальные случайные процессы с нулевыми математическими ожиданиями и одинаковыми стандартными отклонениями σШ (т.е. шумы).
Тогда для математических ожиданий и стандартных отклонений процессов ηl(t) получим при  (т.е. при малых отношениях сигнал/шум до сжатия)
(т.е. при малых отношениях сигнал/шум до сжатия)


Далее, как видно из таблицы соединений и фиг.4, сигналы на входах коммутатора 392 отстают по фазе на  от сигналов на одноименных входах коммутатора 391.
от сигналов на одноименных входах коммутатора 391.
В результате коммутации на выходах компенсатора 15 допплеровской частоты образуются процессы ηC(t), ηS(t) c математическими ожиданиями  ,
,
 ,
,
где


при  j=1, 2, 3,...
j=1, 2, 3,...
т.е. произойдет компенсация фазовых набегов из-за допплеровской частоты FД с точностью до искажений, тем меньших, чем больше r. Как показано выше, эти искажения приводят к энергетическим потерям, которые даже при r=2 не превосходят 1 дБ, а при r≥4 они пренебрежимо малы.
Таким образом, на первом и втором выходах компенсатора 15 допплеровской частоты благодаря предлагаемой схеме соединений образуются квадратурные составляющие сигналов, которые поступают на первые входы перестраиваемых дискретных фильтров 181 и 182 соответственно.
Перестраиваемые дискретные фильтры 181 и 182 работают следующим образом (фиг.6).
Оба ПДФ (181 и 182) в каждом периоде повторения согласуются с зондирующим сигналом по коду фазовой манипуляции (ФМ). Для обеспечения этого согласования в каждом периоде повторения ПДФ 181, 182 перестраиваются в соответствии с изменением кода ФМ в генераторе 7 кода.
Настройка дискретных фильтров 181 и 182 на требуемый код ФМ производится во время излучения зондирующих импульсов путем записи генерируемого в данном периоде кода в регистры 43 сдвига каждого ПДФ 181, 182. Код ФМ поступает на пятые входы дискретных фильтров 181, 182. Запись этого кода в регистры 43 осуществляется пачкой из N тактовых импульсов, поступающих на четвертые входы дискретных фильтров 181, 182 со второго выхода (67, фиг.10) синхронизатора 22. По окончании пачки из N тактовых импульсов дискретные фильтры 181, 182 оказываются настроенными на ожидаемый отраженный ФМ-сигнал.
В момент окончания зондирующего импульса, являющийся моментом начала отсчета дальности, с четвертого выхода синхронизатора 22 на вторые входы ПДФ 181 и 182 приходит сигнал обнуления (69, фиг.10), под действием которого обнуляются регистры 44 сдвига и счетчики 48.
Принимаемый сигнал по тактовым импульсам, приходящим с третьего выхода синхронизатора 22 на третьи входы ПДФ 181, 182, вдвигается в регистры 42 сдвига. Одновременно тактовые импульсы обеспечивают запись "единиц" в регистр 44 сдвига и счет текущей дальности счетчиком 48. Двоичные числа, записанные в регистрах 42 и 43, поразрядно суммируются по модулю 2 в сумматорах 451,...,45N. Одноразрядные числа поступают на первые входы элементов 461,..., 46N И-НЕ, на вторые входы которых поступают разрешающие ("1") или запрещающие ("0") сигналы с регистра 44 сдвига. На малых дальностях R<R0 с каждым тактовым импульсом разрешающий сигнал поступает на очередной элемент "И-НЕ", т.к. очередная "единица" вдвигается в регистр 44, поэтому число открытых элементов "И-НЕ" пропорционально текущей дальности. При R≥R0 все разряды регистра РС3 44 оказываются заполненными "единицами" и все элементы "И-НЕ" - открытыми. Одноразрядные числа с выходов сумматоров 451,..., 45N проходят через открытые элементы "И-НЕ" 461,..., 46N и складываются в многовходовом сумматоре 47, после чего из образовавшегося в нем результата вычитается число, пропорциональное текущей дальности (число тактовых импульсов, отсчитанное от нулевой дальности счетчиком 48). Благодаря поочередному открыванию выходов разрядов регистров 42 сигнала с ростом текущей дальности в зоне R<R0, "действующая" длина ПДФ 181 (182) изменяется в соответствии с (6), и фильтр всегда согласован по длине с принимаемым сигналом.
В момент, когда принимаемый сигнал полностью вдвигается в регистры 42 сдвига, т.е. когда наступит момент согласования, на выходах дискретных фильтров 181 и 182 образуются главные пики квадратурных составляющих сжатого сигнала. Квадратурные составляющие сжатых сигналов поступают на первый и второй входы блока 19 объединения квадратур, где они возводятся в квадрат в соответствующих квадратурах и суммируются. Эти операции обеспечивают исключение неизвестной начальной фазы отраженных сигналов.
Сигналы, отраженные от целей, находящихся на дальностях  , начинают поступать на вход приемника, когда еще не закончено излучение зондирующего импульса и приемник, соответственно, закрыт, так что первые
, начинают поступать на вход приемника, когда еще не закончено излучение зондирующего импульса и приемник, соответственно, закрыт, так что первые  разрядов ФМ-сигналов не принимаются, а принимаемый сигнал состоит из оставшихся
разрядов ФМ-сигналов не принимаются, а принимаемый сигнал состоит из оставшихся  разрядов, которые в момент согласования занимают N1 первых разрядов сигнальных регистров 42 сдвига в ПДФ 181, 182. Однако, в отличие от прототипа [4], обеспечивается полное согласование ПДФ с принимаемыми сигналами независимо от дальностей до целей, их отражающих.
разрядов, которые в момент согласования занимают N1 первых разрядов сигнальных регистров 42 сдвига в ПДФ 181, 182. Однако, в отличие от прототипа [4], обеспечивается полное согласование ПДФ с принимаемыми сигналами независимо от дальностей до целей, их отражающих.
С выхода блока 19 объединения квадратур принимаемый сигнал, представленный многоразрядным положительным числом, поступает на блок 50 сравнения с порогом устройства 20 обработки информации (фиг.7), где сравнивается с числовым порогом, формируемым блоком 21 формирования порога (фиг.8), который работает следующим образом.
На первый вход блока 21 формирования порога поступает обнуляющий сигнал с четвертого выхода (69, фиг.10) синхронизатора 22, который обнуляет счетчик 54 и триггер 57 в момент начала отсчета дальности. Далее тактовые импульсы с третьего выхода синхронизатора 22 (68, фиг.10) поступают через второй вход блока 21 и открытый ключ 58 на счетный вход счетчика 54, в котором производится, таким образом, отсчет текущей дальности в единицах τИ. Коды текущей дальности с выходов счетчика 54 поступают на младшие разряды адреса блока 56 памяти, в котором записаны значения порога в функции от дальности, проходящие на выход блока 21. Одновременно сигналы с выходов счетчика 54 поступают на дешифратор 55, который срабатывает в момент, когда текущая дальность R достигает значения  . В этот момент по сигналу с выхода дешифратора 55 срабатывает триггер 57, который подает сигнал на старший разряд БП 56 и одновременно блокирует вход счетчика 54. Таким образом, устанавливается постоянный (максимальный) порог на выходе блока 21 формирования порога на дальностях R≥R0. Благодаря этому в блок 50 сравнения с порогом через четвертый вход устройства 20 поступают пороговые значения, которые при R<R0 растут пропорционально N1, где N1 - число действующих разрядов ПДФ 181, 182, что обеспечивает постоянство ложных выбросов из-за шумов в области R<R0. Если значение сигнала, поступающее на сигнальный вход блока 50 сравнения с порогом, превышает пороговое значение, приходящее на его второй вход, вырабатывается единичный сигнал, в противном случае - нулевой. Пачка нормированных импульсов сигналов от цели поступает на первый вход блока 51 первичной обработки, проходит цепь из n-1 последовательно соединенных регистров 591,... 59n-1 сдвига, на которые в качестве сдвигающих импульсов через третий вход блока 51 поступают импульсы с третьего выхода синхронизатора 22 (68, фиг.10), стробируемые на время TИ излучения зондирующих импульсов в ключе 52, на который в качестве управляющих приходят импульсы с длительностью ТИ с пятого выхода (70, фиг.10) синхронизатора 22. Число разрядов в регистрах 591,..., 59n-1 следует выбирать равным
. В этот момент по сигналу с выхода дешифратора 55 срабатывает триггер 57, который подает сигнал на старший разряд БП 56 и одновременно блокирует вход счетчика 54. Таким образом, устанавливается постоянный (максимальный) порог на выходе блока 21 формирования порога на дальностях R≥R0. Благодаря этому в блок 50 сравнения с порогом через четвертый вход устройства 20 поступают пороговые значения, которые при R<R0 растут пропорционально N1, где N1 - число действующих разрядов ПДФ 181, 182, что обеспечивает постоянство ложных выбросов из-за шумов в области R<R0. Если значение сигнала, поступающее на сигнальный вход блока 50 сравнения с порогом, превышает пороговое значение, приходящее на его второй вход, вырабатывается единичный сигнал, в противном случае - нулевой. Пачка нормированных импульсов сигналов от цели поступает на первый вход блока 51 первичной обработки, проходит цепь из n-1 последовательно соединенных регистров 591,... 59n-1 сдвига, на которые в качестве сдвигающих импульсов через третий вход блока 51 поступают импульсы с третьего выхода синхронизатора 22 (68, фиг.10), стробируемые на время TИ излучения зондирующих импульсов в ключе 52, на который в качестве управляющих приходят импульсы с длительностью ТИ с пятого выхода (70, фиг.10) синхронизатора 22. Число разрядов в регистрах 591,..., 59n-1 следует выбирать равным  , для того чтобы обеспечить накопление n импульсов пачки со всех элементов дальности. В процессе накопления благодаря перестройке кодов ФМ от импульса к импульсу при бинарном квантовании перед сжатием происходит, как в прототипе [4], подавление боковых лепестков. Накопленные за n периодов повторения сигналы образуются в сумматоре 60, с выхода которого они поступают в цифровой компаратор 61, в котором они сравниваются с заранее выбранным пороговым числом
, для того чтобы обеспечить накопление n импульсов пачки со всех элементов дальности. В процессе накопления благодаря перестройке кодов ФМ от импульса к импульсу при бинарном квантовании перед сжатием происходит, как в прототипе [4], подавление боковых лепестков. Накопленные за n периодов повторения сигналы образуются в сумматоре 60, с выхода которого они поступают в цифровой компаратор 61, в котором они сравниваются с заранее выбранным пороговым числом  , реализуя обнаружение по правилу
, реализуя обнаружение по правилу  . При условии превышения порога в компараторе 61 образуются нормированные импульсы, которые поступают в блок 62 опроса, осуществляющий объединение первого и последнего импульсов, превысивших порог, и считывание значений дальности и азимута обнаруженных целей. Это достигается в измерителе 63 дальности и измерителе 64 азимута, на первый из которых с этой целью приходят обнуляющие импульсы с четвертого выхода синхронизатора 22, фиксирующие начало отсчета дальности, и импульсы с частотой
. При условии превышения порога в компараторе 61 образуются нормированные импульсы, которые поступают в блок 62 опроса, осуществляющий объединение первого и последнего импульсов, превысивших порог, и считывание значений дальности и азимута обнаруженных целей. Это достигается в измерителе 63 дальности и измерителе 64 азимута, на первый из которых с этой целью приходят обнуляющие импульсы с четвертого выхода синхронизатора 22, фиксирующие начало отсчета дальности, и импульсы с частотой  с третьего входа блока 51 первичной обработки, осуществляющие счет дальности в измерителе 63 дальности, а на второй - коды значений азимута с датчика углов антенны, поступающие из блока 23 приводов антенны через шестой вход устройства 20 обработки информации на четвертый вход блока 51 первичной обработки.
с третьего входа блока 51 первичной обработки, осуществляющие счет дальности в измерителе 63 дальности, а на второй - коды значений азимута с датчика углов антенны, поступающие из блока 23 приводов антенны через шестой вход устройства 20 обработки информации на четвертый вход блока 51 первичной обработки.
Координаты обнаруженных целей, сгруппированные попарно, записываются в оперативном запоминающем устройстве 65 целей, откуда они поступают на выход блока 51 и - дальше - на вход блока 53 вторичной обработки.
Блок 53 вторичной обработки может быть реализован в виде программируемого вычислительного устройства. Работа его состоит в межобзорной обработке и формировании команд, связанных с изменениями параметров зондирующих (а следовательно, и принимаемых) сигналов по мере изменения дальностей до целей. Межобзорная обработка состоит в накоплении решений о первичном обнаружении, принятых в блоке 51 первичной обработки, за цикл из М обзоров и вынесении окончательных решений вида "К из М" по каждой из целей, обнаруженных в блоке 51, а также - в измерении координат этих целей - дальности и азимута путем "сглаживания", т.е. усреднения их за М обзоров с учетом перемещений целей относительно РЛС за время этой обработки.
Значение текущей максимальной дальности до цели из числа обнаруженных Rmax(t) сравнивается с величиной  , и, когда условие
, и, когда условие  перестает выполняться, принимается решение об уменьшении длительности ТИ зондирующих сигналов, например, при сохранении разрядности N кода ФМ, одновременно регулируется полосапропускания приемного устройства в соответствии с соотношением
перестает выполняться, принимается решение об уменьшении длительности ТИ зондирующих сигналов, например, при сохранении разрядности N кода ФМ, одновременно регулируется полосапропускания приемного устройства в соответствии с соотношением  и уменьшается мощность зондирующих сигналов по мере уменьшения максимальной дальности пропорционально
и уменьшается мощность зондирующих сигналов по мере уменьшения максимальной дальности пропорционально  . Соответствующие команды подаются через первый, второй и третий выходы устройства 20 обработки информации на входы управления блока 13 видеоусилителей, синхронизатора 22 и усилителя 3 мощности, соответственно, одновременно значения координат целей поступают на четвертый - информационный выход устройства 20 обработки информации.
. Соответствующие команды подаются через первый, второй и третий выходы устройства 20 обработки информации на входы управления блока 13 видеоусилителей, синхронизатора 22 и усилителя 3 мощности, соответственно, одновременно значения координат целей поступают на четвертый - информационный выход устройства 20 обработки информации.
Работа синхронизатора 22 состоит в формировании сигналов управления (фиг.11), при этом сигнал 68 (третий выход) образуется путем деления частоты импульсов, генерируемых генератором 71 тактовых импульсов (фиг.11), в требуемое число раз с помощью управляемого делителя 72, на вход которого поступает командный сигнал со второго выхода устройства 20 обработки информации. Сигналы 66, 69 и 70 - на первом, четвертом и пятом выходах - образуются с помощью счетчика 74, дешифратора 75 и блока RS-триггеров 76, формирующего сигналы требуемой длительности и задержки (упреждения) относительно начала периода повторения, а сигнал 67 на втором выходе - путем логического перемножения сигналов 69 и инвертированного сигнала 70, выполняемого с помощью ключа 73.
Техническим преимуществом предлагаемого способа обнаружения по сравнению со способам, реализованным в прототипе, является то, что он позволяет повысить скрытность зондирующего излучения и помехозащищенность, прежде всего, по отношению к ответным помехам, наводимым станциями исполнительной разведки, при обнаружении целей в широком диапазоне дальностей (при изменении максимальной дальности до цели в 10 и более раз в процессе наблюдения) в том числе РЛС, установленными на подвижных носителях, а также обеспечивает повышение разрешающей способности по дальности и точности измерения дальности при уменьшении дальности до целей.
Повышение скрытности и помехозащищенности по отношению к ответным помехам определяется возможностью значительного повышения длительности сложных ФМ-сигналов по сравнению с прототипом при сохранении энергии сигналов благодаря оптимальному выбору длительности импульсов ТИ, которая на больших дальностях обнаружения может быть повышена, по крайней мере, на порядок (т.е. в 10 и более раз) по сравнению с прототипом, во столько же раз может быть снижена импульсная мощность, что и обеспечивает соответствующее повышение скрытности. Для РЛС, установленных на подвижных носителях, необходимым условием применения сравнительно длинных ФМ-сигналов является компенсация допплеровского сдвига частоты, соответствующего собственной радиальной скорости носителя (с точностью  ), в принимаемых сигналах перед сжатием, как это и предусмотрено в заявляемом способе.
), в принимаемых сигналах перед сжатием, как это и предусмотрено в заявляемом способе.
Предлагаемое - по мере уменьшения максимальной дальности - пропорциональное уменьшение длительности зондирующих импульсов одновременно с расширением спектра ФМ-сигналов и полосы пропускания приемника при сохранении (или уменьшении) числа разрядов кода ФМ и уменьшение импульсной мощности зондирующих сигналов пропорционально кубу значения максимальной дальности позволяют сохранить высокую скрытность в этих условиях, а также повысить разрешение по дальности и точность ее измерения в несколько раз (например, в 5-10 раз). Наконец, автоматическое согласование фильтра сжатия с длительностью ФМ-сигналов от целей, расположенных на дальностях R, меньших величины  , одновременно с соответствующей регулировкой порога обнаружения импульсов сжатых сигналов приводит к повышению наблюдаемости в
, одновременно с соответствующей регулировкой порога обнаружения импульсов сжатых сигналов приводит к повышению наблюдаемости в  раз по мощности (например, в 2-3 раза - благодаря уменьшению дисперсии шумов при сжатии) по сравнению с прототипом, не предусматривающим этих мер, что эквивалентно соответствующему повышению помехозащищенности по отношению к шумовым помехам, в частности, на 3-5 дБ.
раз по мощности (например, в 2-3 раза - благодаря уменьшению дисперсии шумов при сжатии) по сравнению с прототипом, не предусматривающим этих мер, что эквивалентно соответствующему повышению помехозащищенности по отношению к шумовым помехам, в частности, на 3-5 дБ.
Таким образом, реализация предлагаемых мер приведет к существенному повышению скрытности, помехозащищенности, разрешению по дальности и точности измерения дальности, в том числе для РЛС, установленных на подвижных носителях.
Пользуясь сведениями, представленными в материалах заявки, предложенный способ можно реализовать в РЛС, изготовленной согласно приведенному описанию и чертежам с использованием известных материалов, элементов, узлов и технологии, и применять для обнаружения сигналов от целей и измерения их координат, что доказывает промышленную применимость объекта изобретения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Digitized Marine Radar. Furuno Electric Co., LTD, Catalogue1. R-089f, Radio Holland Group, Electr. Systems, Marine.
2. Справочник по радиолокации. Ред. М.Сколник. Пер. с английского. Том 4 (гл.3 "Гражданские судовые РЛС, стр.96), М.: Сов. Радио, 1978.
3. Импульсный когерентный допплеровский радар с перестройкой частоты. Патент США № 4338604, кл. G 01 S 13/24, опубл. 06.07.82.
4. Радиолокационная станция. Патент РФ № 2039365, кл. G 01 S 13/52, с приоритетом от 27.09.93, опубл. 09.07.95 (прототип).
5. Кук Ч. и Бернфельд М. Радиолокационные системы, М.: Сов. Радио, 1971 (стр.103, табл.41).
6. Справочник по радиолокации. Ред. М.Сколник. Перевод с английского. Том 3, М. Сов. Радио, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
Изобретение относится к радиолокационной технике и может быть использовано в радиолокационных станциях (РЛС), предназначенных для навигации и обнаружения целей. Достигаемый технический результат - повышение скрытности зондирующего излучения, помехозащищенности и экологической чистоты РЛС. В способе обнаружения генерируют и излучают модулированные зондирующие сигналы, принимают и обрабатывают отраженные сигналы, длительность зондирующих импульсов и разрядность кода фазовой манипуляции выбирают в соответствии с определенными условиями, по мере приближения к цели изменяют параметры зондирующих импульсов, полосы пропускания приемного устройства, комплексной огибающей бинарно-квантованных сигналов после фазового детектирования и объединенных сжатых сигналов. РЛС содержит синхронизатор (22), блок перестройки частоты (8), возбудитель (5), фазовый манипулятор (4), усилитель мощности (3), антенный переключатель (2), антенну (1), усилитель высокой частоты (9), смеситель (10), усилитель промежуточной частоты (11), блок фазовых детекторов (12), блок видеоусилителей (13), блок амплитудных квантователей (14), перестраиваемые дискретные фильтры (181, 182), блок объединения квадратур (19), блок приводов антенны (23), вычислитель допплеровской частоты (17), преобразователь "код-частота" (16), компенсатор допплеровской частоты (15), блок формирования порога (21). 2 н.п.ф-лы, 11 ил., 2 табл.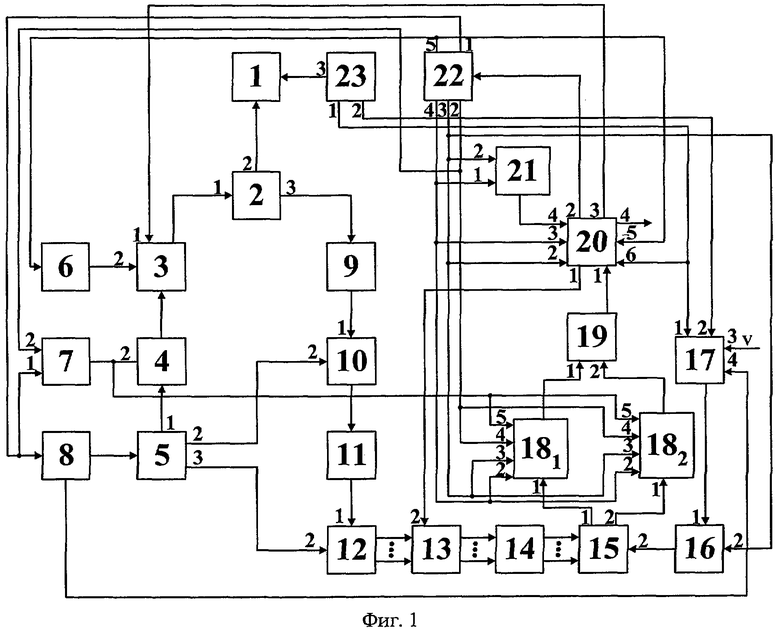
где Rmax - максимальная ожидаемая дальность до цели,
с - скорость света,
ΔR - требуемое разрешение по дальности,
по мере приближения к цели уменьшают длительность зондирующих импульсов при сохранении или уменьшении разрядности кода фазовой манипуляции, одновременно регулируют полосу пропускания приемного устройства в соответствии с соотношением  и уменьшают импульсную мощность зондирующих импульсов пропорционально
и уменьшают импульсную мощность зондирующих импульсов пропорционально  в дискретные моменты времени с периодом, равным
в дискретные моменты времени с периодом, равным  сдвигают по фазе в сторону отставания квантованные квадратурные составляющие сигналов на угол
сдвигают по фазе в сторону отставания квантованные квадратурные составляющие сигналов на угол  где 2r - число уровней квантования угла 2π, r=2, 3,... - целые числа, FД - доплеровская частота, определяемая соотношением
где 2r - число уровней квантования угла 2π, r=2, 3,... - целые числа, FД - доплеровская частота, определяемая соотношением  где
где
V - собственная скорость носителя радиолокационной станции,
ψA,  - углы, определяющие направление оси диаграммы направленности антенны по азимуту и углу места относительно направления вектора V,
- углы, определяющие направление оси диаграммы направленности антенны по азимуту и углу места относительно направления вектора V,
и изменяют коэффициент сжатия N1(R) и уровень квантования U(N1) объединенных сжатых сигналов от целей на дальностях R<R0, в соответствии с соотношениями

 ,
,
где  - целая часть от
- целая часть от 
 - монотонно возрастающая функция
- монотонно возрастающая функция 
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |

