Изобретение относится к измерительной технике и может быть использовано при построении устройств для измерения постоянного, переменного и импульсного электрических токов, в частности датчиков тока в системах быстродействующей релейной защиты электроэнергетических объектов низкого (до 1000 В) напряжения.
Целью изобретения является расширение функциональных возможностей способа путем получения наряду с информацией об измеряемом токе дополнительной информации о производной и о знаке производной измеряемого тока,
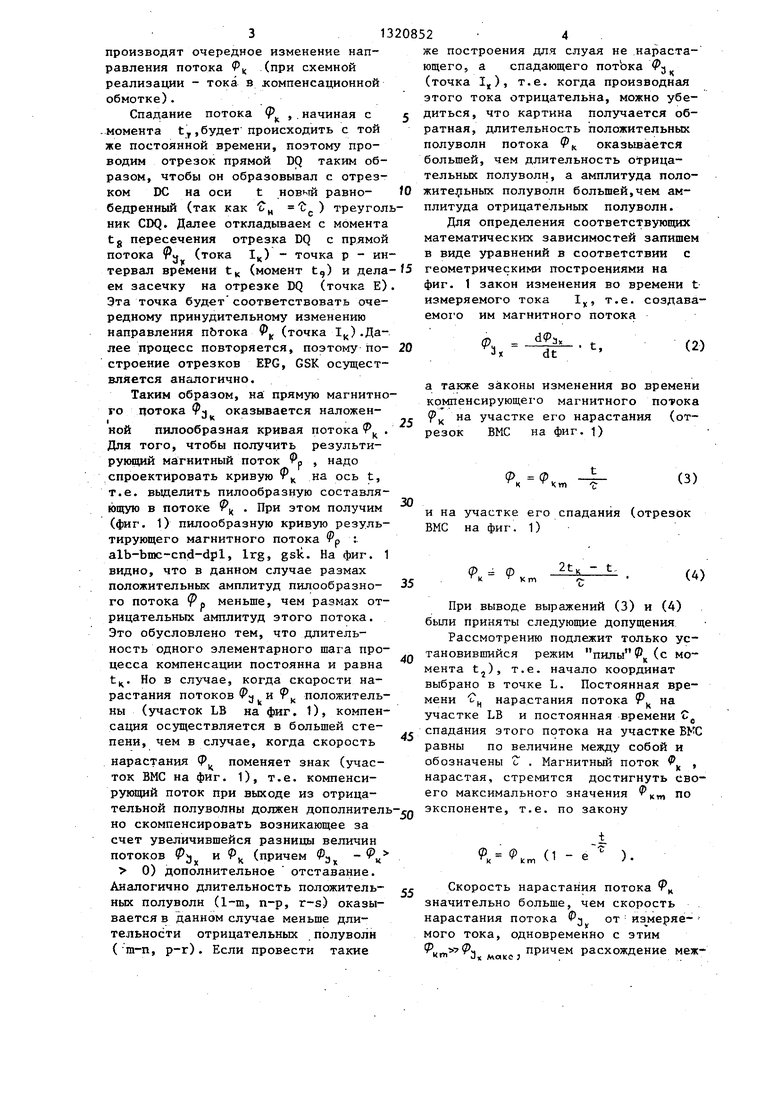
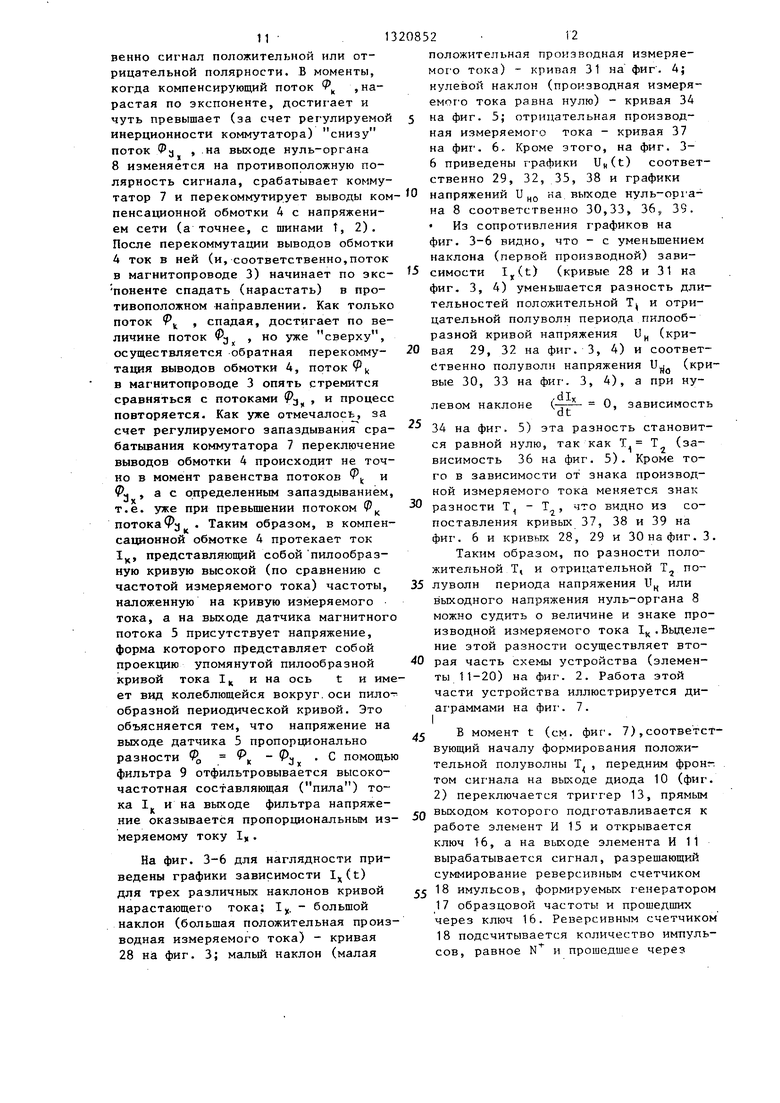
На фиг. 1 приведены геометрические построения, поясняющие принцип формирования компенсационного и результирующего магнитных потоков на примере измеряемого тока 1 линейно нарастаю1чей формы, т.е. для одного вполне определенного значения проdlv
изводнои
dt
измеряемого тока; на
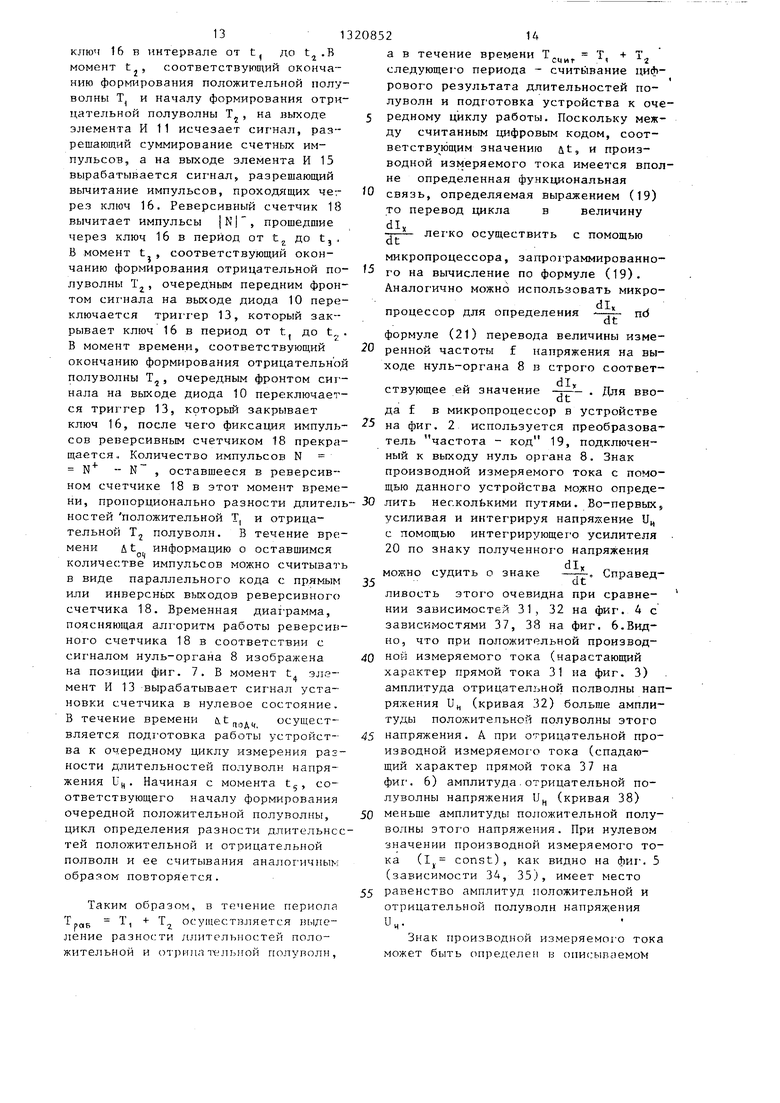
фиг. 2 - структурная схема устройства, реализующего предлагаемый способ; на фиг. 3-7 - диаграммы, поясняющие работу устройства.
Для пояснения предлагаемого способа измерения электрического тока допустим, что измеряемый ток I име- ет линейно нарастающую форму (прямая LMNPRS).Поскольку компенсационный способ измерения всегда обеспечивает нахож,цение рабочей точки на линейном участке кривой намагничивания, используемого для измерения магнитопровода, то создаваемый измеряемым током 1 магнитный поток изменяется по аналогичному X
кону. Согласно данному способу в про .цессе измерения формируют компенсирующий магнитный поток f , направленный встречно потоку 9 . Положим что при любом законе изменения 1 (f-, ) поток Рц изменяется (нарастает или спадает) по линейному закону. Очевидно, что допущение справедливо, если максимально возможное значение компенсирующего магнитного потока кт удовлетворяет условию кт tJx ФиГо 1 видно, что с
момента t.
компенсирующий поток начинает нарастать (прямая ALB), стремясь достигнуть по величине поток 9-- (прямая LMNPRS). Когда это произойдет (точка L), результирующий маг нитный поток i. станет равным нулю, так как потоки P;j и Р направлены встречно, т.е. имеют противоположные знаки. Далее в соответствии с данным способом продолжают обеспечивать нарастание потока Ф в течение постоянного строго опреде- ленно1 о времени t после наступления момента равенства нулю значения
потока 9, , т.е. после смены полярности потока Рр , Действительно, до момента t (точка L) выполнялось условие РЗ,( после момента tj выполняется условие j Р .
Далее принудительно изменяют направление изменения магнитного потока
на противоположное, т.е. поток.,
f
начинает спадать, по-прежнему стремясь достигнуть по величине поток
РЗ, При этом результирующий поток 9р, достигнув своего пика в точке В (D), начинает уменьшаться и в момент t (точка М (т) , когда опять наступит равенство потоков -) ч Pk
поток Фр снова станет равным нулю. Далее процесс будет повторяться: на интервале времени полярность результирующего потока будет противоположной той, какая была на
предыдущем интервале t,-t, и спустя тот же постоянный интервал времени t опять изменяют направление потока на противоположное. Затем процесс повторяется. При построении фиг. 1 учтено условие равенства постоянных времени нарастания ( С и) и спадания (Т) потока ,т.е. СJ, ., , причем параметр t выбирается из условия
40
t. ,i Т .
(1)
Графическая интерпретация процесса сводится к построению равнобедренных треугольников ABC, CDQ, EGZ
45 следующим образом.
Зафиксируем момент t равенства потоков k (точка М). Отсчитаем с момента t время t. и сделаем соответствующую засечку в точ50 ке С на отрезке ВМС (на фиг. 1 случайно совпало попадание точки С на ось времени t в момент tj.) .Далее процесс повторяется: поток Р начинает снова нарастать с той же пос55 тоянной времени, поэтому прямую CND проводим параллельно прямой ALB.B момент t (точка N) опять совпадут по величине потоки Рц и Фд и опять спустя время t., в момент t,(точка D )
роизводят очередное изменение напавления потока Ри (при схемной еализации - тока в компенсационной бмотке).
Спадание потока Ф , .начиная с омента t,будет происходить с той е постоянной времени, поэтому проводим отрезок прямой Вр таким образом, чтобы он образовывал с отрезком DC на оси t новьтй равнобедренный (так как „ треугольник CDQ. Далее откладываем с момента tg пересечения отрезка DQ с прямой потока jj (тока I,.) - точка р - интервал времени t (момент tg) и делаем засечку на отрезке DQ (точка Е). Эта точка буд-ет соответствовать очередному принудительному изменению направления пЬтока Ф (точка 1).Далее процесс повторяется, поэтому построение отрезков EPG, GSK осуществляется аналогично.
Таким образом, на прямую магнитного потока Фд оказывается наложенной пилообразная кривая потока Р . Для того, чтобы получить результирующий магнитный поток Рр , надо спроектировать кривую на ось t, т.е. вьщелить пилообразную составляющую в потоке P . При этом получим (фиг. 1) пилообразную кривую результирующего магнитного потока р : alb-bmc-cnd-dpl, Irg, gsk. На фиг. 1 видно, что в данном случае размах положительньЕс амплитуд пилообразного потока р меньше, чем размах отрицательных амплитуд этого потока. Это обусловлено тем, что длительность одного элементарного шага процесса компенсации постоянна и равна t). Но в случае, когда скорости нарастания потоков к к положительны (участок LB на фиг, 1), компенсация осуществляется в большей степени, чем в случае, когда скорость
нарастания ф поменяет знак (участок ВМС на фиг. 1), т.е. компенсирующий поток при выходе из отрицательной полуволны должен дополнительно скомпенсировать возникающее за счет увеличившейся разницы величин потоков Ф и Р (причем Фу -
0) дополнительное отставание. Аналогично длительность положительных полуволн (1-т, п-р, r-s) оказывается в данном случае меньше длительности отрицательных полуволн ( ш-п, р-г). Если провести такие
же построения для слуая не нарастающего, а спадающего потока Ф (точка I,), т.е. когда производная этого тока отрицательна, можно убедиться, что картина получается обратная, длительность положительных полуволн потока Рц оказывается большей, чем длительность отрицательных полуволн, а амплитуда поло- житeJ;Iьныx полуволн большей,чем амплитуда отрицательных полуволн.
Для определения соответствующих математических зависимостей запишем в виде уравнений в соответствии с геометрическими построениями на фиг. 1 закон изменения во времени t- измеряемого тока 1, т.е. создава- емог о им магнитного потока
Ф,
Зх
.
dt
t.
(2)
а также законы изменения во времени компенсирующех о магнитного потока на участке его нарастания (отрезок ВМС на фиг. 1)
Ф ф к Хт
(3)
30
и на участке его спадания (отрезок ВМС на фиг. 1)
35
Р, Р
Zt. - t.
(4)
При выводе выражений (3) и (4) были приняты следующие допущения
Рассмотрению подлежит только установившийся режим пилы Р (с момента tj), т.е. начало координат выбрано в точке L. Постоянная времени С нарастания потока f на участке LB и постоянная времени С спадания этого потока на участке ВКС равны по величине между собой и обозначены о . Магнитный поток , нарастая, стремится достигнуть своего максимального значения кт по экспоненте, т.е. по закону
Ф ф (1 - е ) k Km
Скорость нарастания потока Фц значительно больше, чем скорость нарастания потока Р от из меряе- мого тока, одновременно с этим .) макс; расхождение между значением производной и абсолютной величиной потока У на этом участке пренебрежимо мало, следовательно, отрезок LB изображает участок совпадения самой величины
I
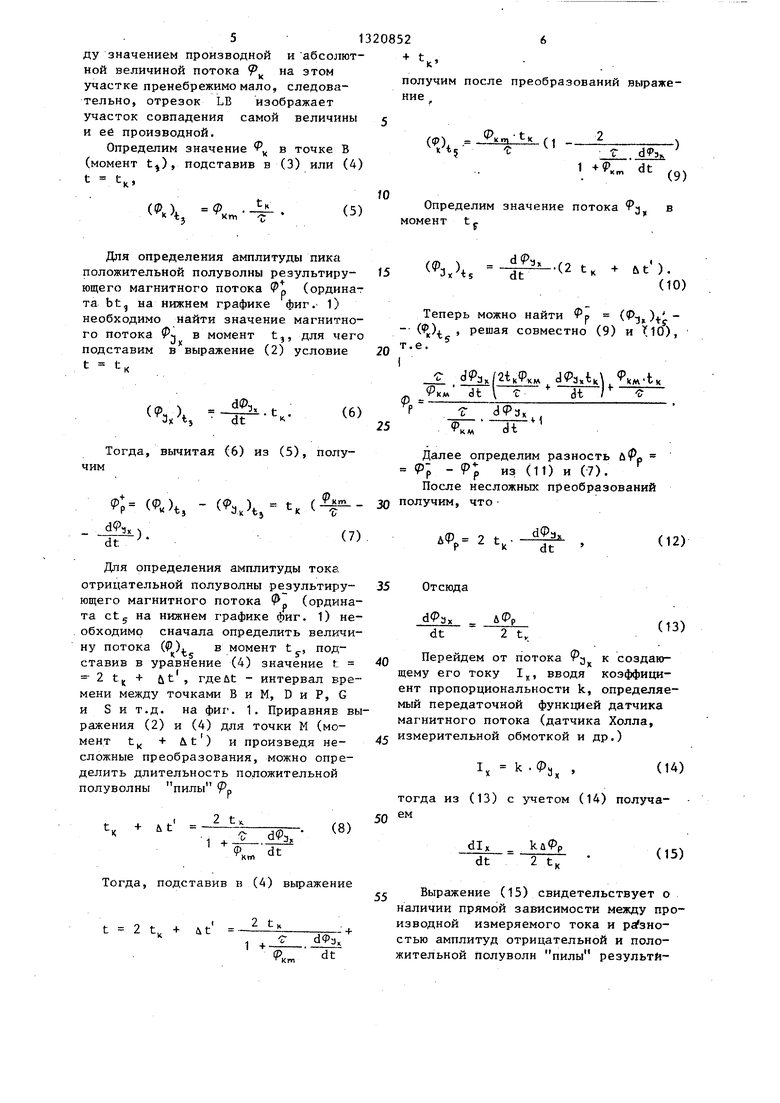
2 t + t , где At - интервал времени между точками В и М, D и Р, G и S и т.д. на фиг. 1. Приравняв выражения (2) и (4) для точки М (момент t + / t ) и произведя несложные преобразования, можно определить длительность положительной полуволны пилы 9р
t
2 t,
(8)
Тогда, подставив в (4) вьфажение
2 t.
ut
2 t,
1 +
Ф
t
dtPa It
- +
получим после преобразований выражение
щему его току 1, вводя коэффициент пропорциональности k, определяемый передаточной функцией датчика магнитного потока (датчика Холла, измерительной обмоткой и др.)
I, k.(p3 , (14) тогда из (13) с учетом (14) получа50
ем
ka Pp 2 t.
(15)
,5 Выражение (15) свидетельствует о наличии прямой зависимости между производной измеряемого тока и стьго амплитуд отрицательной и положительной полуволн пилы результймагнитного потока. Далее опвыражение для интервала вре- II
А t
между точками
С и N, Е и R на фиг. 1 аналогично тому, как мы получили, выражение (8) для интервала времени t + ft t представляющего собой длительность отрицательной полуволны пилы . Опуская промежуточные вьтчисления, получим
2 t,
1 афз«
К16)
т dt
вычитая (8) из (16), имеем
At At
- At
2 t.
Разрешая (17) относительно
путем решения квадратного уравнения, после преобразований получим
d9:,. dt
.„. (
С учетом (14) из (18) имеем
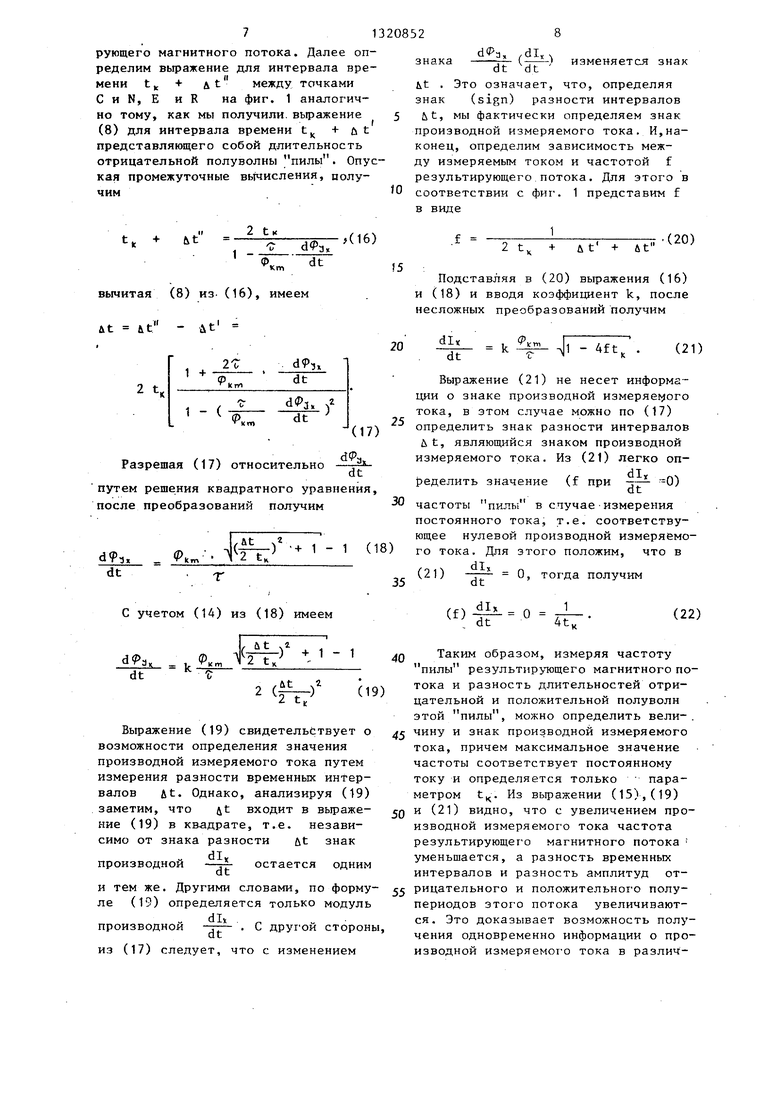
Выражение (19) свидетельйтвует о возможности определения значения производной измеряемого тока путем измерения разности временных интервалов fit. Однако, анализируя (19) заметим, что t входит в вьфаже- ние (19) в кв 1драте, т.е. независимо от знака разности ut знак
производной
dt
остается одним
и тем же. Другими словами, по форму- ле (19) определяется только модуль dl
производной
dt
С друг ой стороны.
из (17) следует, что с изменением
i (Л dt dt
изменяется знак
it . Это означает, что, определяя знак (sign) разности интервалов Jit, мы фактически определяем знак производной измеряемого тока. И,наконец, определим зависимость между измеряемым током и частотой f результирующего потока. Для этого в соответствии с фиг. 1 представим f в виде
-
1
2 t + Л t + ut
(20)
15
Подставляя в (20) выражения (16) и (18) и вводя коэффициент k, после несложных преобразований получим
dl,
dt
k -Jl - Aft .
(21)
17)
25
я,
30
(
18)
35
Выражение (21) не несет информации о знаке производной измеряеь ого тока, в этом случае можно по (17) определить знак разности интервалов U t, являющийся знаком производной измеряемого тока. Из (21) легко оп-
{)еделить значение (f при --- -0)
частоты пилы в случае-измеренил постоянного тока, т.е. соответствующее нулевой производной измеряемого тока. Для этого положим, что в dl.
(21)
dt
О, тогда получим
(f)o
4t.
(22)
40
)
45
50
.
Таким образом, измеряя частоту пилы результирующего магнитного потока и разность длительностей отрицательной и положительной полуволн этой пилы, можно определить вели-, чину и знак производной измеряемого тока, причем максимальное значение частоты соответствует постоянному току и определяется только параметром t. Из вьфажении (15), (19) и (21) видно, что с увеличением производной измеряемого тока частота результирующего магнитного потока уменьшается, а разность временных интервалов и разность амплитуд отрицательного и положительного полупериодов этого потока увеличиваются. Это доказывает возможность получения одновременно информации о производной измеряемого тока в различ91320852
ных формах: в форме частоты, п форме временного интервала, в аналоговой форме.
Анализ графических зависимостей на фиг. 1 показывает также, что используя предложенный способ, можно и другим образом получить информацию о знаке производной измеряемого тока. Для этого необходимо проинтегрировать результирующий магнитный поток (см. нижнюю часть фиг. 1) например, с помощью интегрирующей электрической цепи и фиксировать относительно нулевого уровня (временto
10
н ёны выходы соответственно первого элемента И 11, третьего элемента И 15 и второг о элемента И 12, причем второй вход последнего подключен к инверсному выходу счетного триггера 13. Выходные шины реверсивного счетчика 18 предназначены для подключения устройства к микропроцессору для вычисления по формуле (19) значения производной измеряемого тока dlx
(--i j .
по измеренной разности
dt 4-t
временных интервалов. К микропроцессору подключается также через преНой оси t) знак полученной аналого- -5 образователь (частота - код) 19 вывой величины, который и соответствует знаку производной измеряемого тока.
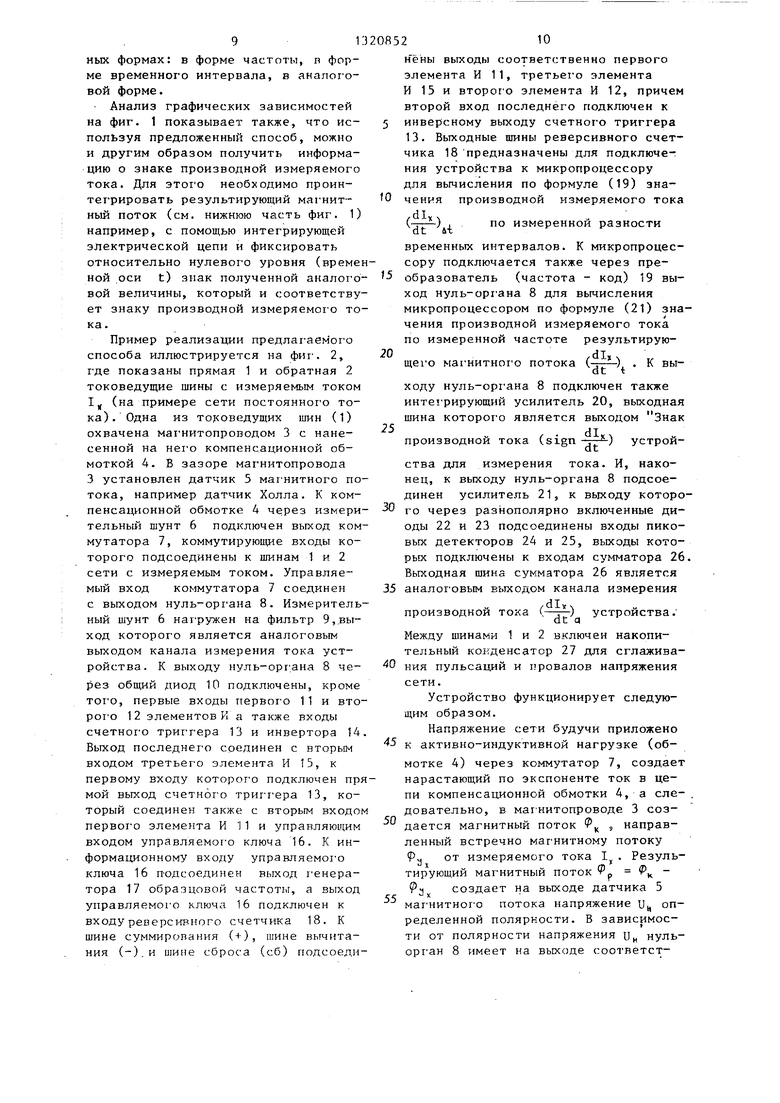
Пример реализации предлаг-аем ог о способа иллюстрируется на фиг . 2, где показаны прямая 1 и обратная 2 токоведущие шины с измеряемым током 1 (на примере сети постоянного тока). Одна из токоведущих шин (1) охвачена мат нитопроводом 3 с нанесенной на нег о компенсационной обмоткой 4. В зазоре магнитопровода 3 установлен датчик 5 маг нитного потока, например датчик Холла. К компенсационной обмотке 4 через измерительный шунт 6 подключен выход коммутатора 7, коммутирующие входы которого подсоединены к шинам 1 и 2 сети с измеряемым током. Управляемый вход коммутатора 7 соединен с выходом нуль-орг ана 8. Измерительный шунт 6 нат ружен на фильтр 9, выход которого является аналоговым выходом канала измерения тока устройства. К выходу нуль-орг ана 8 через общий диод 10 подключены, кроме того, первые входы первого 11 и вто- рог о 12 элементов К а также входы счетног о триггера 13 и инвертора 14 Выход последнего соединен с вторьп входом третьего элемента И 15, к первому входу которог о подключен прямой выход счетног о триггера 13, который соединен также с вторым входом первог о элемента И 11 и управляющим входом управляемог о ключа 16. К информационному входу управляемого ключа 16 подсоединен выход г енера- тора 17 образцовой частоты, а выход управляемого ключа 16 подключен к входу реверс1-гоного счетчика 18. К шине суммирования (+), шине вычитания (-),и шине сброса (сб) подсоеди
o
10
н ёны выходы соответственно первого элемента И 11, третьего элемента И 15 и второг о элемента И 12, причем второй вход последнего подключен к инверсному выходу счетного триггера 13. Выходные шины реверсивного счетчика 18 предназначены для подключения устройства к микропроцессору для вычисления по формуле (19) значения производной измеряемого тока dlx
(--i j .
по измеренной разности
dt 4-t
временных интервалов. К микропроцессору подключается также через пре
ход нуль-орг ана 8 для вычисления микропроцессором по формуле (21) значения производной измеряемого тока по измеренной частоте результирующего магнитног о потока (-гг), К вы
производной тока (sign . ) устройdt Ч
ходу нуль-органа 8 подключен также инте1 рирующий усилитель 20, выходная шина которого является выходом Знак
dl,
dt
ства для измерения тока. И, наконец, к выходу нуль-органа 8 подсоединен усилитель 21, к вьгходу которого через разнополярно включенные диоды 22 и 23 подсоединены входы пиковых детекторов 24 и 25, выходы кото- рьк подключены к входам сумматора 26. Выходная шина сумматора 26 является аналоговым выходом канала измерения
производной тока
()
устройства.
dt q
Между шинами 1 и 2 включен накопительный конденсатор 27 для сглажива- НИН пульсаций и провалов напряжения сети.
Устройство функционирует следующим образом.
Напряжение сети будучи приложено к активно-индуктивной нагрузке (обмотке 4) через коммутатор 7, создает нарастающий по экспоненте ток в цепи компенсаху онной обмотки 4, а следовательно, в магнитопроводе 3 создается магнитный поток направленный встречно магнитному потоку ру от измеряемого тока 1 . Результирующий магнитный поток Р к 9у создает на вьгходе датчика 5 маг нитног о потока напряжение Uj, определенной полярности. В зависимости от полярности напряжения UH нуль- орг ан В имеет на выходе соответст
11
венно сигнал положительной или отрицательной полярности. В моменты, когда компенсирующий поток Р , нарастая по экспоненте, достигает и чуть превышает (за счет регулируемой инерционности коммутатора) снизу поток Фу ,.на выходе нуль-органа
8 изменяется на противоположную полярность сигнала, срабатывает коммутатор 7 и перекоммутирует выводы ком пенсационной обмотки 4 с напряжением сети (а точнее, с шинами Т, 2). После перекоммутации выводов обмотки 4 ток в ней (и, соответственно,поток в магнитопроводе 3) начинает по экс- поненте спадать (нарастать) в противоположном направлении. Как только поток Р , спадая, достигает по величине поток
Р.
но уже
сверху,
осуществляется обратная перекоммутация выводов обмотки 4, поток Фц в магнитопроводе 3 опять стремится сравняться с потоками э , и процесс повторяется. Как уже отмечалось, за счет регулируемого запаздывания срабатывания коммутатора 7 переключение выводов обмотки 4 происходит не точно в момент равенства потоков Р и
).
Зх Т.е.
а с определенным запаздыванием, уже при превышении потоком Р.
/Т
потокаФ . Таким образом, в компенсационной обмотке 4 протекает ток 1, представляющий собой пилообразную кривую высокой (по сравнению с частотой измеряемого тока) частоты, наложенную на кривую измеряемого тока, а на выходе датчика магнитного потока 5 присутствует напряжение, форма которого представляет собой проекцию упомянутой пилообразной кривой тока 1ц и на ось t и имеет вид колеблющейся вокруг, оси пило- образной периодической кривой. Это объясняется тем, что напряжение на выходе датчика 5 пропорционально разности к 3 помощью фильтра 9 отфильтровывается высокочастотная составляющая (пила) тока 1| и на выходе фильтра напряжение оказывается пропорциональным измеряемому току 1„.
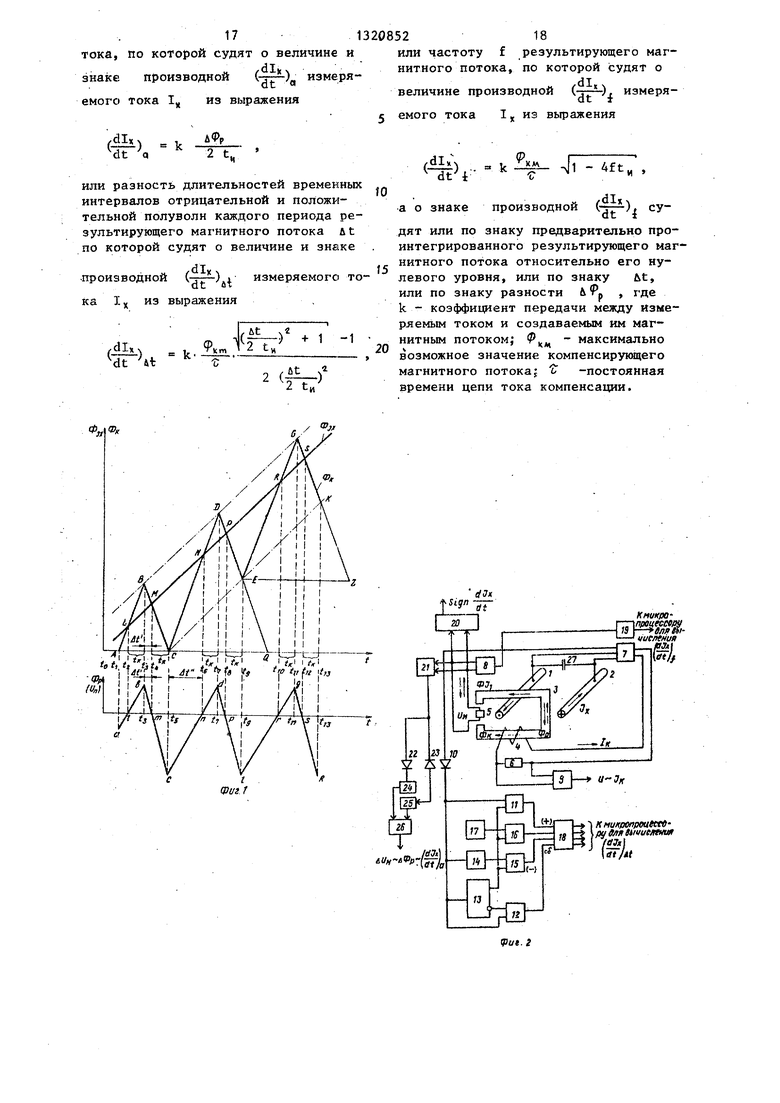
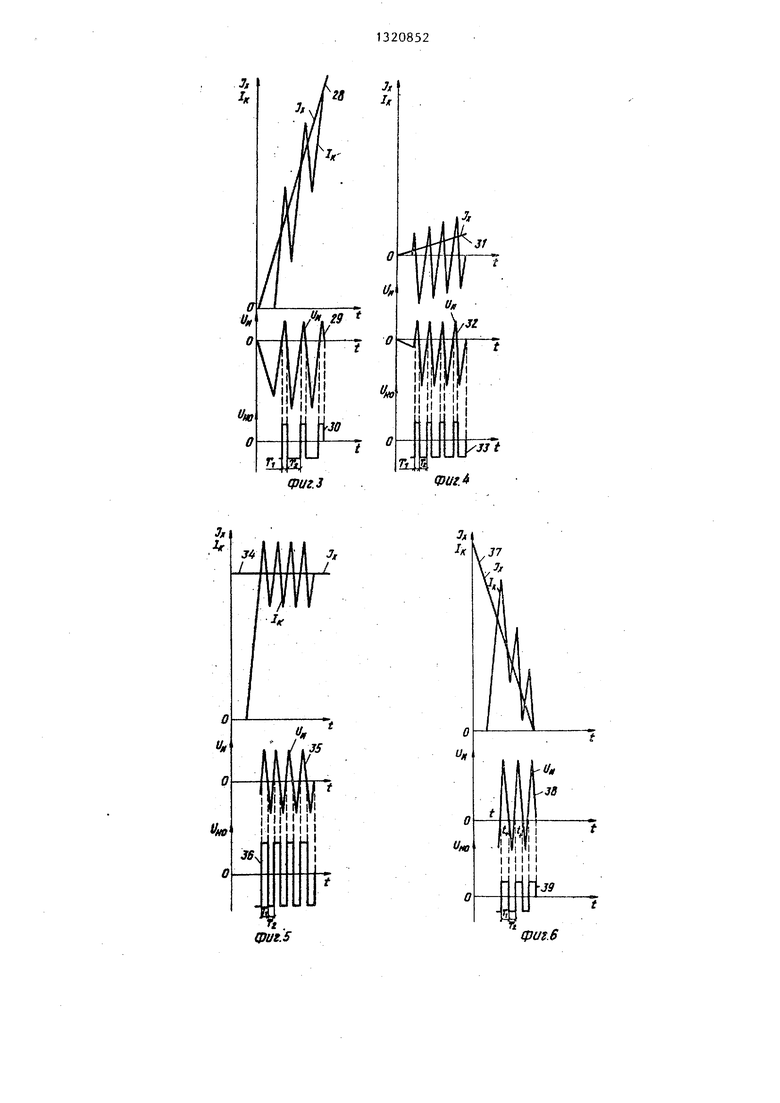
На фиг. 3-6 для наглядности приведены графики зависимости ) Д.ПЯ трех различных наклонов кривой нарастающего тока; ly. - большой наклон (большая положительная производная измеряемого тока) - кривая 28 на фиг. 3; малый наклон (малая
20852 12
положительная производная измеряе- мог о тока) - кривая 31 на фиг. 4; наклон (производная измеря- емог о тока равна нулю) - кривая 34 5 на фиг. 5; отрицательная производная измеряемого тока - кривая 37 на фиг. 6- Кроме этого, на фиг. 3- 6 приведены графики U«(t) соответственно 29, 32, 35, 38 и графики 10 напряжений 11 на выходе нуль-органа 8 соответственно 30,33, 36, 39. Из сопротивления графиков на фиг. 3-6 видно, что - с уменьшением наклона (первой производной) зависимости Ij(t) (кривые 28 и 31 на фиг. 3, 4) уменьшается разность длиf5
0
5
тельностей положительной Т и отрицательной полуволн периода пилообразной кривой напряжения U, (кривая 29, 32 на фиг. 3, 4) и соответственно полуволн напряжения Uy (кривые 30, 33 на фиг . 3, 4), а .-dix
при нулевом наклоне
(
dt
О, зависимость
0
34 на фиг. 5) эта разность становится равной нулю, так как Т Т (зависимость 36 на фиг. 5). Кроме того в зависимости от знака производной измеряемого тока меняется знак разности Т - Т , что видно из сопоставления кривых 37, 38 и 39 на фиг. 6 и кривых 28, 29 и 30 на фиг. 3.
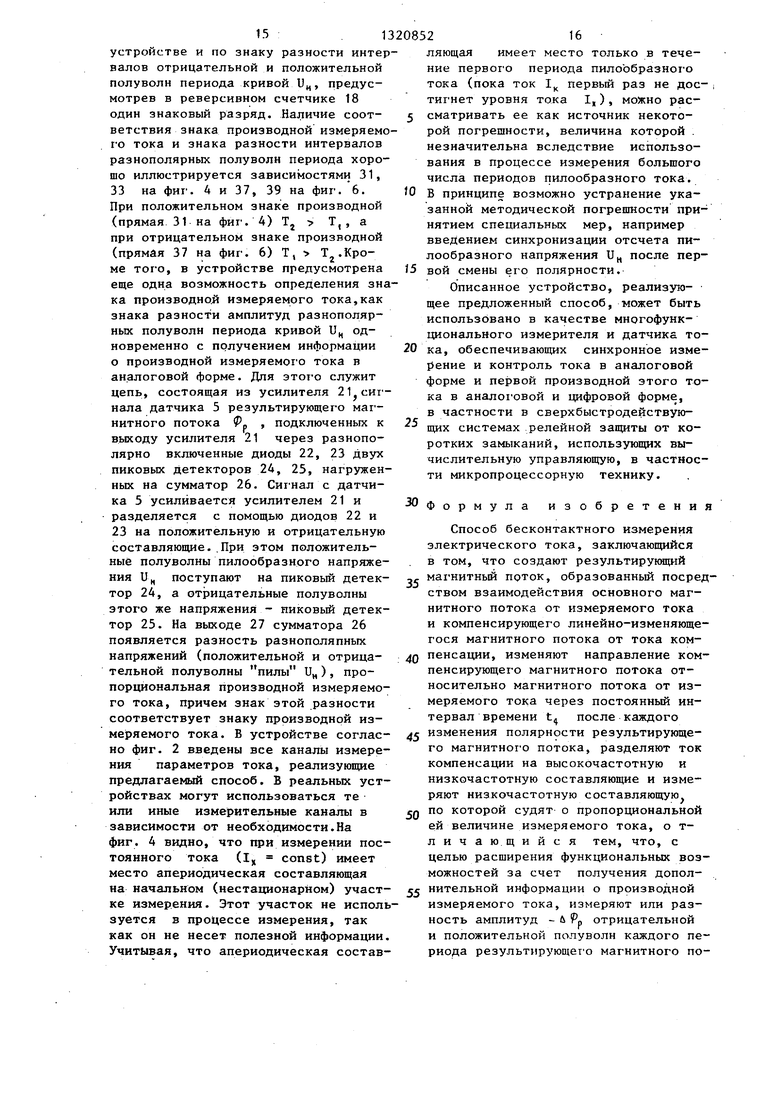
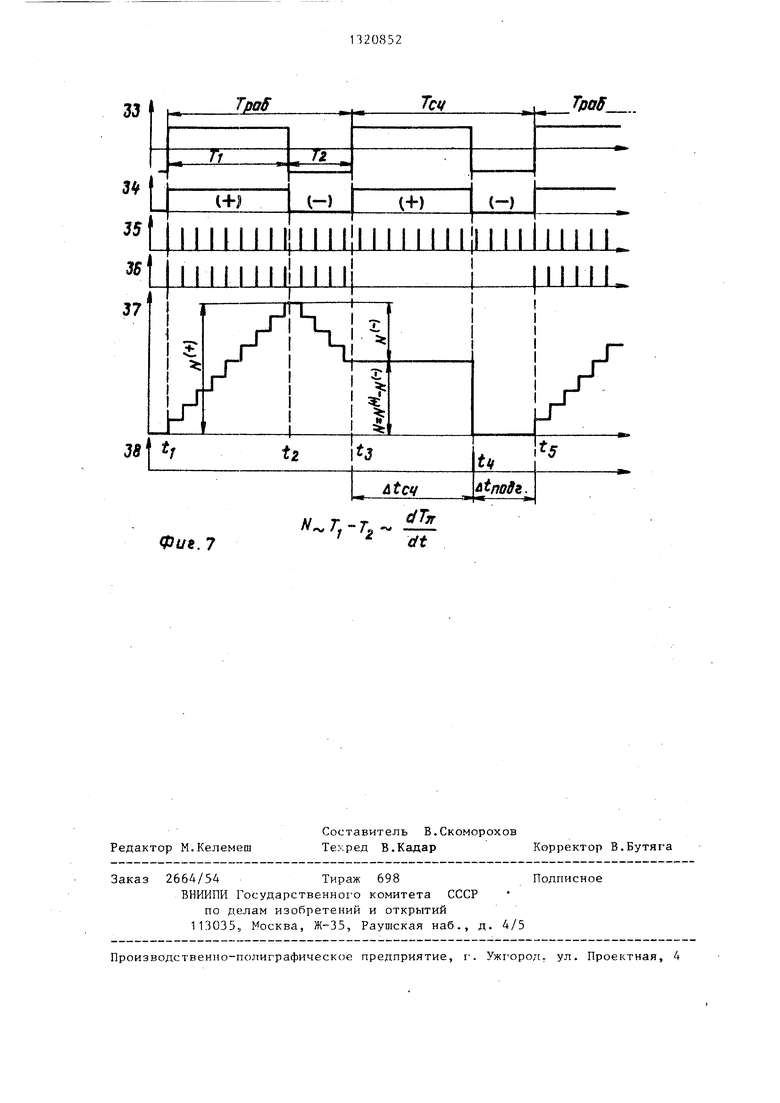
Таким образом, по разности положительной Т, и отрицательной Т по5 луволн периода напряжения U или выходного напряжения нуль-органа 8 можно судить о величине и знаке производной измеряемого тока 1.Выделение этой разности осуществляет вто0 рая часть схемы устройства (элементы 11-20) на фиг. 2. Работа этой части устройства иллюстрируется диаграммами на фи1 . 7.
5
I
В момент t (см. фиг. 7),соответствующий началу формирования положительной полуволны Т , передним фронг. том сигнала на выходе диода 10 (фиг. 2) переключается триггер 13, прямым
Q выходом которого подготавливается к работе элемент И 15 и открывается ключ 16, а на выходе элемента И 11 вырабатывается сигнал, разрешающий суммирование реверсивным счетчиком
18 имульсов, формируемых г енератором
17образцовой частоты и прошедших через ключ 16. Реверсивным счетчиком
18подсчитывается количество импульсов, равное N и прошедшее через
ключ 16 в интервале от t до t, .В момент t , соответствующий окончанию формирования положительной полуволны Т и началу формирования отрицательной полуволны Т, на выходе элемента И 11 исчезает сигнал, раз-решающий суммирование счетных импульсов, а на выходе элемента И 15 вырабатывается сигнал, разрешающий вычитание импульсов, проходящих чег рез ключ 16. Реверсивный счетчик 18 вычитает импульсы |К| прощедшие через ключ 16 в период от t,, до t, . В момент t , соответствующий окончанию формирования отрицательной полуволны Т, очередным передним фронтом сиг нала на выходе диода 10 переключается триггер 13, который закрывает ключ 16 в период от t до t,, В момент времени, соответствующий окончанию формирования отрицательной полуволны Т, очередным фронтом сигнала на выходе диода 10 переключается триггер 13, которьй закрывает ключ 16, после чего фиксация импульсов реверсивным счетчиком 18 прекращается,, Количество импульсов N N - N , оставщееся в реверсивном счетчике 18 в этот момент времени, пропорционально разности длительностей положительной Т, и отрицательной Т полуволн. В течение времени д t информацию о оставшимся количестве импульсов можно считывать в виде параллельного кода с прямым или инверсных выходов реверсивного счетчика 18. Временная диат рамма, поясняющая алгоритм работы реверсивного счетчика 18 в соответствии с сиг налом нуль-органа 8 изображена на позиции фиг. 7. В момент t элемент И 13 вырабатывает сигнал установки счетчика в нулевое состояние. В течение времени tJ,gд осуществляется подготовка работы устройства к очередному циклу измерения разности длительностей полуволн напряжения и,,. Начиная с момента t, соответствующего началу формирования очередной положительной полуволны, цикл определения разности длительностей положительной и отрицательной полволн и ее считывания aнaлoгичны :i образом повторяется.
Таким образом, в течение периола Трдд Т, + Т осуществляется выделение разности ; лителы1ос;тей положительной и (5Tj)nna т(л1)11ой полуволн.
а в течение времени Tj,j Т, - Т
следующего периода - считывание цифI
рового результата длительностей полуволн и подготовка устройства к очередному циклу работы. Поскольку между считанным цифровьш кодом, соответствующим значению ut, и производной измеряемого тока имеется вполне определенная функциональная
связь, определяемая выражением (19) то перевод цикла в величину
div
dt
легко осуществить с помощью
микропроцессора, запро1 раммированно- го на вычисление по формуле (19). Аналогично можно использовать микроdl, ,
процессор для определения --:- по
dt
формуле (21) перевода величины изме- репной частоты f напряжения на выходе нуль-органа 8 в строго соответdl,
ствующее ей значение -:. Для ввоdt
да f в микропроцессор в устройстве на фиг. 2 используется преобразовав тель частота - код 19, подключенный к выходу нуль органа 8. Знак производной измеряемого тока с помощью данного устройства можно опреде- лить несколькими путями. Во-первых, усиливая и интегрируя напряжение и„ с помощью интегрирующего усилителя 20 по знаку полученного напряжения
ожно судить о знаке
dix
Справед-dt
ливость этого очевидна при сравнении зависимостей 31, 32 на фиг. 4 с зависимостями 37, 38 на фиг. 6.Видно, что при положительной производной измеряемого тока (нарастающий характер прямой тока 31 на фиг. 3) амплитуда отрицательной полволны напряжения Uf, (кривая 32) больше амплитуды положительной полуволны этого
напряжения. А при отрицательной производной измеряемог о тока (спадающий характер прямой тока 37 на фиг . 6) амплитуда. отрицательной полуволны напряжения U (кривая 38)
меньше амплитуды положительной полуволны этог о напряжения. При нулевом значении производной измеряемого тока IK const), как видно на фиг . 5 (зависимости 34, 35,), имеет место
равенство амплитуд положительной и отрицательной полуволн напряжения
UHЗнак производной измеряемого тока
может быть определен в oпи(:ывaeмo f
устройстве и по знаку разности интервалов отрицательной и положительной полуволн периода кривой Uj,, предусмотрев в реверсивном счетчике 18 один знаковый разряд. Наличие соответствия знака производной измеряемо fo тока и знака разности интервалов разнополярных полуволн периода хорошо иллюстрируется зависимостями 31, 33 на фиг. 4 и 37, 39 на фиг. 6. При положительном знаке производной (прямая 31 на фиг. 4) Т Т,, а при отрицательном знаке производной (прямая 37 на фиг. 6) Т, Т .Кроме того, в устройстве предусмотрена еще одна возможность определения знака производной измеряемого тока,как знака разности амплитуд разнополярных полуволн периода кривой U, одновременно с получением информации о производной измеряемого тока в аналоговой форме. Для этого служит цепь, состоящая из усилителя нала датчика 5 результирующего магнитного потока . , подключенных к выходу усилителя 21 через разнопо- лярно включенные диоды 22, 23 двух пиковых детекторов 24, 25, нагруженных на сумматор 26. Сигнал с датчика 5 усиливается усилителем 21 и разделяется с помощью диодов 22 к 23 на положительную и отрицательную составляющие..При этом положительные полуволны пилообразного напряжения и поступают на пиковьй детек- е магнитный поток, образованный посредством взаимодействия основного магнитного потока от измеряемого тока и компенсирующего линейно-изменяющегося магнитного потока от тока ком- 40 пенсации, изменяют направление компенсирующего магнитного потока относительно магнитного потока от измеряемого тока через постоянный интор 24, а отрицательные полуволны этого же напряжения - пиковый детектор 25. На выходе 27 сумматора 26 появляется разность разнополяпных напряжений (положительной и отрицательной полуволны пилы и„), пропорциональная производной измеряемого тока, причем знак этой разности соответствует знаку производной измеряемого тока. В устройстве согласно фиг. 2 введены все каналы измерения параметров тока, реализующие предлагаемый способ, В реальных устройствах могут использоваться те или иные измерительные каналы в зависимости от необходимости.На фиг. 4 видно, что при измерении постоянного тока (I, const) имеет место апериодическая составляющая
тервал времени t после каждого изменения полярности результирующего магнитног о потока, разделяют ток компенсации на высокочастотную и низкочастотную составляющие и измеряют низкочастотную составляющую л по которой судят о пропорциональной е:й величине измеряемого тока, о т- личающийся тем, что, с целью расширения функциональных возможностей за счет получения дополна начальном (нестационарном) участ- 55 нательной информации о производной ке измерения. Этот участок не исполь- измеряемого тока, измеряют или раз- зуется в процессе измерения, так как он не несет полезной информации.
ность амплитуд - и Рр отрицательной положительной полуволн каждого пе
Учитывая, что апериодическая состав
5
0
5
ляющая имеет место только в течение первого периода пилообразного тока (пока ток 1 первый раз не дос- -, тигнет уровня тока 1,), можно рассматривать ее как источник некоторой погрешности, величина которой . незначительна вследствие использования в процессе измерения большого числа периодов пилообразного тока. В принципе возможно устранение указанной методической погрешности принятием специальных мер, например введением синхронизации отсчета пилообразного напряжения U, после первой смены его полярности.
Описанное устройство, реализующее предложенный способ, может быть использовано в качестве многофункционального измерителя и датчика тока, обеспечивающих синхронное измерение и контроль тока в аналоговой форме и первой производной этого тока в аналоговой и цифровой форме, в частности в сверхбыстродействующих системах релейной защиты от коротких замыканий, использующих вычислительную управляющую, в частности микропроцессорную технику.
30 ф
ормула изобретения
Способ бесконтактного измерения электрического тока, заключающийся в том, что создают результирукнций
тервал времени t после каждого изменения полярности результирующего магнитног о потока, разделяют ток компенсации на высокочастотную и низкочастотную составляющие и измеряют низкочастотную составляющую по которой судят о пропорциональной е:й величине измеряемого тока, о т- личающийся тем, что, с целью расширения функциональных возможностей за счет получения дополнательной информации о производной измеряемого тока, измеряют или раз-
ность амплитуд - и Рр отрицательной положительной полуволн каждого периода результирующег о магнитного по171320852
по которой судят о величине и
производной
измеряилинит
вел
из выражения
Mt
или разность длительностей временных интервалов отрицательной и положительной полуволн каждого периода результирующего магнитного потока д t по которой судят о величине и знаке
производной ка 31
(
k
из выражения
xt
.1 bt .г Ф Г t
Tkm I LU
+ 1 -1
lem
-D
(fit v 2 t/
18
или частоту f результирующего магнитного потока, по которой судят о
величине производной (; ). измеряdt I
емого тока I из выражения
(P k%л|1 - Aft ,
dl.
a о знаке производной (-тг), суdt 1
дят или по знаку предварительно проинтегрированного результирующего магнитного потока относительно его нулевого уровня, или по знаку &t, или по знаку разности & « , где k - козффи1Щент передачи между измеряемым током и создаваемым им магнитным потоком, максимально возможное значение компенсирующего магнитного потока j S -постоянная времени цепи тока компенсации.
/ /
/
I л.
# tv I l J//J
I | 11,
Фиг.з
JJt
cauiA
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансформатор постоянного тока | 1981 |
|
SU995133A1 |
| Магнитный экран | 1981 |
|
SU995126A1 |
| СПОСОБ УСТРАНЕНИЯ ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ В ВОЛОКОННО-ОПТИЧЕСКОМ ГИРОСКОПЕ | 2009 |
|
RU2441202C2 |
| СПОСОБ УСТРАНЕНИЯ ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ В ВОЛОКОННО-ОПТИЧЕСКОМ ГИРОСКОПЕ | 2011 |
|
RU2472111C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА | 1998 |
|
RU2133473C1 |
| Способ геоэлектроразведки | 1979 |
|
SU857898A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КВАЗИСИНУСОИДАЛЬНОЕ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2356160C1 |
| Способ измерения амплитуды синусоидального напряжения инфранизкой частоты и устройство для его осуществления | 1983 |
|
SU1132242A1 |
| Способ измерения тока | 1977 |
|
SU811153A1 |
| Способ токовой защиты асинхронного электродвигателя | 1988 |
|
SU1582262A1 |
Изобретение может быть использовано, при построении устройств для измерения посто янного, переменного и импульсного токов, в частности датчиков тока в система быстродействующей релейной защиты электроэнергетических объектов низкого напряжения до 1000 В. Цель изоёретения - расширение функциональных возможностей бесконтактного определения электрическог о тока путем получения наряду с информацией об измеряемом токе дополнительной информации о производной и о знаке производной измеряемого тока. Способ предусматривает вьтолнение ряда математических операций по определению величины и знака производной. Устройство, реализующее способ, может быть использовано в качестве многофункционального измерителя и датчика тока, обеспечивающих синхронное измерение и контроль тока в аналоговой форме и первой производной этого тока в аналоговой и цифровой форме, в частности в сверхбыстродействующих системах релейной защиты от коротких замыканий, использующих вычислительн то управляющую, в частности микропроцессорную технику. 7 ил. ч. (Л
фиг.5
Зл
IK
J
UHO
фиг.6
| Патент США № 3573616, кл | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| Трансформатор тока | 1981 |
|
SU1030867A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
