Изобретение относится к радиотехнике и может быть использовано в пм- рокополосной связи.
Цель изобретения - повьшюние помехоустойчивости.5
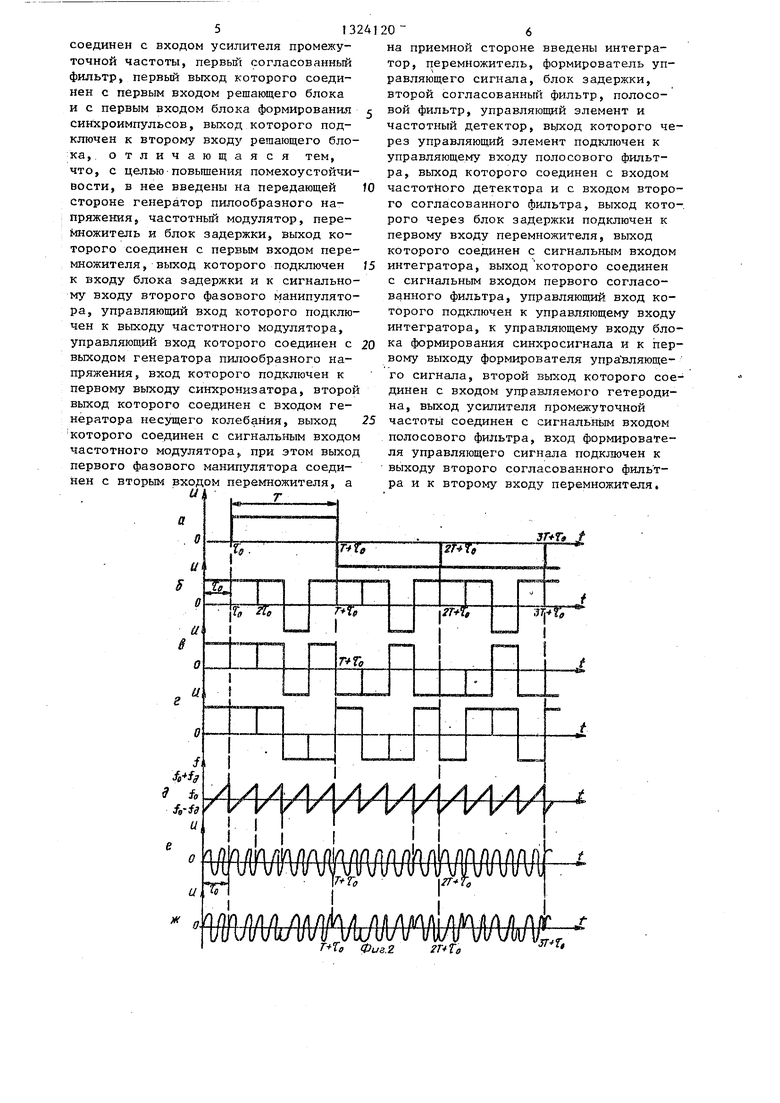
На фиг.1 изображена структурная электрическая схема предложенной системы связи; на фиг.2 - временная диаграмма передающей стороны; на фиг.З - време1-тая диаграмма приемной стороны.fО
Широкополосная система связи с фа- зоманипулированными сигналами содержит на.передающей стороне первый фазовый манипулятор 1, генератор 2 псевдослучайной последовательности, )5 синхронизатор 3, блок 4 задер кки, пе- ремяожитель 5, генератор б пилообразного напряжения, второй фазовый манипулятор 7, частотньш модулятор 8, генератор 9 несуш,шг колебаний, усили - 20 тель 10 мощности, а на приемной смеситель П, управляемьй гетеродин 12, Заправляющий элемент 13, усилитель 14 промежуточной частоты, частотньш детектор 15, полосовой фильтр 16, пер- 25 вый согласованньй фипьтр 17. блок 18 задержки, перемножитель 19, интегратор 20, второй согласованньш фильтр 21 , решающий блок 22, формирователь 23
управляющего сигнала, блок 24 форми- 30 бания« На второй вход второго фазо- рования синхросигнала,
На фиг в 2 и 3 обозначено: t - текущее время, и - амплитуда, f - частового манипулятора 7 поступает несуще колебание () с частотой,плавно изменяющейся на интервале Гр в одних и тех лее пределах и по одному и тому
та, fo - средняя частота.
fa девиация, частоты, РДитель- 35 к закону. В качестве примера на ность элемента псевдослучайной после- фиг,2д приведен линейный закон изме- довательности, Т -- длительность ин- нения частоты, но он может быть про- формационной посыш ;киизвольным и задается формой напряжеСистема работает следу сшщм образом.40
На передающей стороне тактовые iiM пульсы с периодом следования Т,, равным длительности элемента псевдослучайной последовательности (ПСИ), с первого выхода синхронизатора 3 посту- 4,5 маемый с выхода второго фазового ма- пают на вход генератора 2 ПСП и ге:ве-- иипулятора 7 фазоманипулированный сиг- ратора 6 пилообразного напряжения, . нал с изменяющейся частотой (фиг,2ж) На выходе генератора 2 ПСП формирует- усиливается в уси;гштеле 10 мощности ся ПСП (фиг,26) с периодом Т , равным длительности информационной посыпки, 50 причем Т N ро , где N - число элементов ПСП, f.| - длительность элемея та ПСП, Эта последовательность (фиг.26) поступает на управляющий
вход первого фазового ман:шт:улятора 1, 55 го гетеродина 12. Далее сигнал на сигнальный вход которого поступа- (фиг,За) .усиливается в усилителе 14 ют шформационные посылки длительностью Т (фиг.2.а), С выхода первого
кия генератора 6 пилообразного напряжения. Во втором фазовом манипуляторе 7 осуществляется манипуляция фазы несущего колебания на 180° в соответствии с перекодированной по относи- телакому принципу ПСП (фиг,2г) Снии поступает на выход передающей части системьь На приемной стороне принимаемый сигнал поступает на вход смесителя М, где осуществляется перенос на промежуточную, частоту с помощью на- .пряжения, поступающего с управляемопромежуточной частоты и поступает на полосовой 16 с перестраиваемой
фазового манипулятора 1 манипулиро- ванная по фазе информационными посылками псевдослучайная видеопоследовательность (фиг.2в) поступает на вход перемножителя 5, которьш в совокупности с блоком 4 задержки служит для внесения относительности в передавае- Mhrii сигнал.
При относительном методе передачи . в начале сеанса связи передается один избыточный элемент, не несущий информации, но необходимый для определения знака первого элемента. Перекодированная по относительному принципу видеопоследовательность (фиг,2г) подается на сигнальньм вход второго фазового манипулятора 7, Одновременно генератор 6 пилообразного напряжения, синхронизируемьш тактовыми . импульсами с синхронизатора 3, формирует напрялсение заданной пилообразной формы, которое модулирует в частотном модуляторе 8 частоту несущего колебания, поступающего с генератора 9 несущего колебания, синхронизируемого напряжением с синхронизатора 3, таким образом, что на интервале ITe длительности элемента ПСП укладывается целое число периодов колебания« На второй вход второго фазо-
вого манипулятора 7 поступает несущее колебание () с частотой,плавно изменяющейся на интервале Гр в одних и тех лее пределах и по одному и тому
маемый с выхода второго фазового ма- иипулятора 7 фазоманипулированный сиг- нал с изменяющейся частотой (фиг,2ж) усиливается в уси;гштеле 10 мощности
кия генератора 6 пилообразного напряжения. Во втором фазовом манипуляторе 7 осуществляется манипуляция фазы несущего колебания на 180° в соответствии с перекодированной по относи- телакому принципу ПСП (фиг,2г) Снимаемый с выхода второго фазового ма- иипулятора 7 фазоманипулированный сиг- нал с изменяющейся частотой (фиг,2ж) усиливается в уси;гштеле 10 мощности
и поступает на выход передающей части системьь На приемной стороне принимаемый сигнал поступает на вход смесителя М, где осуществляется перенос на промежуточную, частоту с помощью на- .пряжения, поступающего с управляемого гетеродина 12. Далее сигнал (фиг,За) .усиливается в усилителе 14
промежуточной частоты и поступает на полосовой 16 с перестраиваемой
313
средней частотой. С выхода полосового фильтра 16 сигнал подается на вход второго согласованного фильтра 21 и одновременно на вход частотного детектора 15, с выхода которого снима- ется напряжение, пропорциональное изменению частоты несущего колебания. Это напряжение через управляющий элемент 13 управляет частотой настройки полосового фильтра 16, изменяя сред- нюю частоту фильтра в соответствии с изменением частоты несущего колебания. При этом полоса пропускания полосового Лильтра I6 меньше полосы сигнал а. Второй согласованный фильтр 21 согласован с частотно-модулированным (ЧМ) элементом сигнала длительностью fj с соответствующим законом изменения частоты. С вькода второго согласованного фильтра 21 сигнал поступает на формирователь 23 управляющего сигнала, где используется для поиска принимаемого ЧМ-сигнала по частоте и слежения за ним по частоте и задержке, а также для формирования тактовых импульсов (фиг.Зд) с периодом tp для сброса интегратора 20 в моменты достижения максимума напряжения отклика вторым согласованным фильтром 21 и для работы первого согласованного фильтра 17 и блока 24 формирования синхросигнала. Для поиска ЧМ-сигнала по частоте формирователь 23 управляющего сигнала перестраивает частоту
управляемого гетеродина 12, После
окончания поиска и вхождения в связь на выходе второго согласованного фильтра 21 появляется сигнал (фиг.Зб) представляющий собой автокорреляционную функцию ЧМ-элемента сигнала с частотой, равной средней промежуточной частоте сигнала. Этот сигнал име- е,т ярко выраженные пики в. моменты окончания элементов сигнала, причем, чем больше пределы изменения частоты сигнала, тем уже пики и больше их амплитуда. Далее этот сигнал перемножается в перемножителе I9 на свою копию, задержанную на время f в блоке 18 задержки, интегрируется в ин- теграторе 20 и поступает на вход первого согласованного фильтра 17, Совокупность блока 18 задержки, перемножителя 19 и интегратора 20 представляет собой автокорреляционную схему приема, опорным колебанием для которой является задержанный на V исходный сигнал, В моменты окончания эле
г O 15 о 5 0
5
0 5 0 5
ментов сигнала (в моменты максимума огибающей отклика второго согласованного фильтра 21) импульсами с формирователя 23 управляющего сигнала (фиг.Зд), поступающими на вход интегратора 20, производится сброс интегратора 20. Временное диаграммы напряжений, на выходах перемножителя 19 и - интегратора 20 изображены на фиг.Зв, г соответственно. Сигнал на выходе интегратора 20 () представляет собой врздеопоследовательность со снятой относительностью, соответствующую последовательности на выходе первого фазового манипулятора 1 передающей части системы (фиг,2б). Этот сигнал обрабатывается первым согласован- ;Ным фильтром 17, согласованным на видеочастоте со всей ПСП длительностью Т. Сигнал на выходе первого согласованного фильтра 17 представляет собой автокорреляционную функцию ПСП (фиг,3е) и имеет пики в моменты окончания информационных посьшок. Этот сигнал используется в блоке 24 формирования синхросигнала дпя формирования импульсов (фиг.Зж), управляющих режимом работы решающего блока 22. Поступающий на решающий блок 22 с выхода первого согласованного фильтра 17 видеосигнал (фиг,3в) стробиру- ется в моменты максимумов напряжения импульсами (.фиг,3ж) с блока 24 формирования синхросигнала В зависимости от полярности напряжения на входе решающего блока 22 в этот момент на выходе решающего блока 22 появляются посылки соответствующей полярности. Таким образом, на выходе приемной стороны системы восстанавливается двоичная информационная последовательность (фиг,3з), соответствующая переданной.
Формула изобретения Широкополосная система связи с фа- зоманипулированными сигналами, содержащая на передающей стороне генератор несущего колебания, синхронизатор, первый выход которого соединен с входом генератора псевдослучайной последовательности, выход которого подключен к управляющему входу первого фазового манипулятора, второй фазовый манипулятор, выход которого подключен к входу усилителя мощности, а на приемной стороне - управляемый гетеродин, выход которого соединен с первым входом смесителя, выход которого
513
соединен с входом усилителя промежуточной частоты, nepBbrfi согласованный фильтр, первый выход которого соединен с первым входом решающего блока и с первым входом блока формирования синхроимпульсов, выход которого подключен к второму входу решающего блока, отличающаяся тем, что, с целью повышения помехоустойчивости, в нее введены на передающей стороне генератор пилообразного напряжения частотный модулятор, пере- Множитель и блок задержки, выход которого соединен с первым входом перемножителя , выход которого подключен к входу блока задержки и к сигнальному входу второго фазового манипулятора, управляющий вход которого подключен к выходу частотного модулятора, управляющий вход которого соединен с выходом генератора пилообразного напряжения, вход которого подключен к первому выходу синхронизатора, второй выход которого соединен с входом генератора несущего колебания, выход которого соединен с сигнальным входом частотного модулятора, при этом выход первого фазового манипулятора соединен с вторым входом перемножителя, а
0 6
на приемной стороне введены интегратор, перемножитель, формирователь управляющего сигнала, блок задержки, второй согласованный фильтр, полосовой фильтр, управляющий элемент и частотный детектор, вьрсод которого через управляющий элемент подключен к управляющему входу полосового фильтра, выход которого соединен с входом частотного детектора и с входом второго согласованного фильтра, выход которого через блок задержки подключен к первому входу перемножителя, выход которого соединен с сигнальным входом интегратора, выход которого соединен с сигнальным входом первого согласованного фильтра, управляющий вход которого подключен к управляющему входу интегратора, к управляющему входу блока формирования синхросигнала и к первому выходу формирователя упра вляюще- го сигнала, второй выход которого соединен с входом управляемого гетеродина, выход усилителя промежуточной частоты соединен с сигнальным входом полосового фильтра, вход формирователя управляющего сигнала подключен к выходу второго согласованного фильтра и к второму входу перемножителя.
)К
Фиг.22ПТв
ffJ{/ff.3


Изобретение относится к радиотехнике и обеспечивает повышение помехоустойчивости. Устр-во содержит на передающей стороне фазовые манипуляторы 1 и 7, г-р 2 псевдослучайной последовательности, С1шхронизатор 3, г-р 6 пилообразного напряжения,г-р 9 несущих колебаний, у-ль 10 мощности. Вновь введены блок 4 задержки, перемножитель 5, частотный модулятор 8, на приемной стороне - смеситель 11, управляемый гетеродин 12, УПЧ 14, согласованньш фильтр 17, решающий блок 22, блок 24 формирования синхросигнала. Вновь введены управляющий эл-т 13, частотный детектор 15, поло- совьгй фильтр 16, блок 18 задержки, перемножитель 19, интегратор 20, согласованный фильтр 21, формирователь 23 управляющего сигнала, Приведены временные диаграммы передающей и приемной сторон. 3 шт. i (Л ф1/г.1 -чжь
ВНИИПИ Заказ 2973/57Тираж 638. Подписное
Произв-полигр. пр-тиё, г. Ужгород, ул. Проектная, 4
| Варакин Л.Е | |||
| Системы связи с шу- моподобными сигналами | |||
| -М,: Радио и связь, 1985, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
