Изобретение относится к управлению подземным транспортом, в частное-, ти к контролю положения шахтных подвижных объектов, например вагонеток,, скипов и т.д.
Цель изобретения - повьш1ение чувствительности .
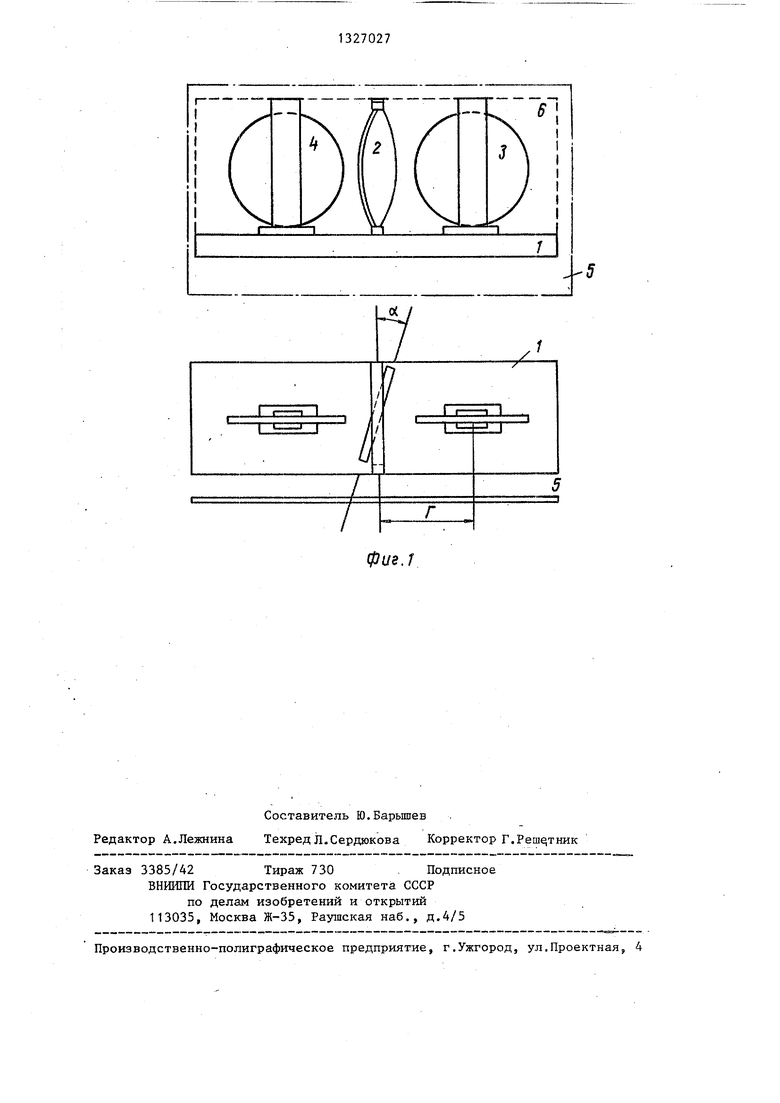
На фиг,1 представлена конструкция чувствительного элемента; на фиг.2- функциональная схема предлагаемого устройства.
Чувствительный элемент содержит (фиг.1) установленную на основании
1 излучающую рамку 2, плоскость кото- 15 лизится к рабочей поверхности 6 чувс- рой
повернута к плоскости приемной и дополнительной приемной рамок 3 и 4 на угол 90 + о.
Контролируемый объект 5 и рабочая стор.она 6 чувствительного элемента (параллельная плоскости приемньгх рамок) находятся в параллельных плоскостях и расположены друг против друга.
Устройство содержит (фиг.2) передатчик 7 5 выходом подключенный к излучающей рамке 2, приемник 8, входами соединенный с приемной и дополнительной приемной рамками 3 и 4, а выходом - с входом выходного блока 9. Питание передатчика 7 и приемника 8 осуществляется от блока 10 питания.
Приемник 8 включает в себя приемник 11 и дополнительный приемник 12 (которые могут быть выполнены в виде компараторов) , одни входы которых соединены с выходами соответствующих приемных рамок 3 и 4, а выходы - с одним и другим входами блока 13 совпадения. Кроме, того, приемник 8 содержит последовательно соединенные интегратор 14, амплитудный селектор 15 и одно- вибратор 16, выход которого образует выход приемника и подключен к входу выходного блока 9.
Источник 17 опорного напряхсения одним из выходов соединен с другими входами приемника 11 и дополнительного приемника 12, а другим вьтходом - с другим входом амплитудного селектора 15.
Устройство работает следующим образом.
При повороте плоскости излучающей рамки 2 к плоскости приемной и дополнительной приемной рамок 3 и 4 на угол 90°+о индудированные в приемных рамках ЭДС равны меж,ду собой по амплитуде (фаза определяется направлетвительного элемента на расстояние
R
после чего и„ начинает резко
20
25
мим расти.
Величина К,у,ц связана с угломо - допустимым углом поворота плоскости излучающей рамки к плоскости, перпендикулярной плоскости приемных рамок, и расстоянием (Г) между центром излучающей рамки 2 и центром любой из приемной и дополнительной приемной рамок 3 или 4 соотношением
мин
60
- «.
Ti
arctg
5.AAj I i2ii§ Г+35,4
30
35
40
50
55
Это выражение обуславливает ol, ., меньше которого нельзя поворачивать плоскость излучающей рамки 2 к плоскости приемной и дополнительной приемной рамок 3 и 4 при заданных Г и
р
Передатчик 7 через излучающую рамку 2 возбуждает ЭДС в приемной и дополнительной приемной рамках 3 и 4 чувствительного элемента 6. Индуцируемые в приемной и дополнительной приемной ранках 3 и 4 синусоидальные сигналы поступают на входы приемника 11 и дополнительного приемника 12j где сравниваются с одним и тем же напряжением, подаваемым с одного выхода источника 17 опорного напряжения . Сравнение оперного напряжения с изменяющимися по амплитуде синусоидальными сигналами выходных приемных рамок приводит к широтной модуляции5 причем при уменьшении амплитуды синусоидального сигнала на выходе приемных рамок 3 и 4 уменьшается pfln- т.ельность вьпсодного импульсаj а при увеличении - увеличивается. Равные по амплитуде синусоидальные выходные ,с {гналы приемной и дополнительной приемной рамок 3 и 4 приводят к появлению импульсов одинаковой длитель
нием намотки приемной рамки по отношению к излучающей) при любом значении, oi и увеличиваются от О до U. при измененрш угла от О до 90°.
При приближении контролируемого объекта 5 к рабочей поверхности 6 чувствительного элемента на расстояние, меньшее R, сигнал U приемной рамки увеличивается, а сигнал Uj второй дополнительной рамки уменьшается. Уменьшение сигнала U, в дополнительной рамке происходит до тех пор, пока контролируемый объект 5 не приблизится к рабочей поверхности 6 чув
твительного элемента на расстояние
R
после чего и„ начинает резко
мим расти.
Величина К,у,ц связана с угломо - допустимым углом поворота плоскости излучающей рамки к плоскости, перпендикулярной плоскости приемных рамок, и расстоянием (Г) между центром излучающей рамки 2 и центром любой из приемной и дополнительной приемной рамок 3 или 4 соотношением
60
- «.
Ti
arctg
5.AAj I i2ii§ Г+35,4
0
5
0
0
5
Это выражение обуславливает ol, ., меньше которого нельзя поворачивать плоскость излучающей рамки 2 к плоскости приемной и дополнительной приемной рамок 3 и 4 при заданных Г и
р
Передатчик 7 через излучающую рамку 2 возбуждает ЭДС в приемной и дополнительной приемной рамках 3 и 4 чувствительного элемента 6. Индуцируемые в приемной и дополнительной приемной ранках 3 и 4 синусоидальные сигналы поступают на входы приемника 11 и дополнительного приемника 12j где сравниваются с одним и тем же напряжением, подаваемым с одного выхода источника 17 опорного напряжения . Сравнение оперного напряжения с изменяющимися по амплитуде синусоидальными сигналами выходных приемных рамок приводит к широтной модуляции5 причем при уменьшении амплитуды синусоидального сигнала на выходе приемных рамок 3 и 4 уменьшается pfln- т.ельность вьпсодного импульсаj а при увеличении - увеличивается. Равные по амплитуде синусоидальные выходные ,с {гналы приемной и дополнительной приемной рамок 3 и 4 приводят к появлению импульсов одинаковой длительности на выходах приемника 11 и дополнительного приемника 12. На схеме
13совпадения выходные импульсы сравниваются по длительности. Если они различные по длительности, то на выходе схемы 13 совпадения появляются импульсы, длительность которых равна разности длительностей входньк импульсов схемы 13 совпадения. 6 дальнейшем выходные импульсы схемы 13 совпадения интегрируются на интеграторе
14и селектируются по амплитуде на амплитудном селекторе 15, уровень селекции которого подается с другого выхода источника 17 опорного напряжения и выбирается с учетом места установки устройства контроля положения подвижных объектов из электропроводного материала.
Одновибратор 16 нормирует по длительности выходные импульсы амплитудного селектора 15, а выходной блок 9 выпрямляет их и усиливает для манипуляции выходным реле.
Формула изобретения
1. Устройство для контроля положения подвижных объектов из электропроводного материала, содержащее установленные в каждом месте контроля передатчик, подключенный к излучающей рамке, расположенные в одной плоскости и симметрично относительно излучающей рамки вдоль зоны контроля приемные рамки, одна из которых подключена к одному входу приемника, другой вход которого подключен к ис5
точнику опорного напряжения, интегратор, выходом подключенньш к одному входу амплитудног о селектора, выход которого соединен с одновибратором, выходом подключенным к регистру памяти, отличающееся тем, что, с целью повьшения чувствительности, оно снабжено дополнительным приемни0 ком, одним из входов подключенным к другой приемной рамке, а другим - к источнику опорного напряжения, блоком совпадения, один вход которого подключен к выходу первого приемника,
5 а другой вход - к выходу дополнитель- ного приемника, а выход соединен с входом интегратора, причем другой вход амплитудного селектора подключен к другому выходу источника опор0 ного напряжения, а излучающая и приемные рамки выполнены в виде окружностей равного диаметра и излучающая рамка установлена наклонно к плоскости, перпендикулярной плосткости при5 емных рамок.
2. Устройство по П.1, отличающееся тем, что угол наклона излучающей рамки к плоскости, перпендикулярной плоскости приемных рамок:
„ .-|о „„, .
где Г - расстояние между центрами
излучающих и приемных рамок, не превьппающее трех диаметров рамок.
,- минимальное расстояние от приемных рамок до продольной границы зоны контроля.
Изобретение относится к управлению подзем1й)1м транспортом, в частности к контролю положения шахтных подвижных объектов. Цель изобретения- повышение чувствительности. Контролируемый объект 5 и рабочая сторона 6 чувствительного элемента находятся в параллельных плоскостях и расположены друг против друга. При повороте плоскости излучающей рамки 2 и плоскости приемной 3 и дополнительной приемной 4 рамок на угол (90°±сС) индуцированные в приемных рамках ЭДС равны между собой по амплитуде при любом значении угла о(. Равные по амплитуде синусоидальные выходные сигналы приемной и дополнительной приемной рамок 3 и 4 приводят к импульсам одинаковой длительности на выходе приемника 11 и дополнительного приемника 12. 1 з.п. ф-лы, 2 ил. (Л оо tsD О to | фиг. 2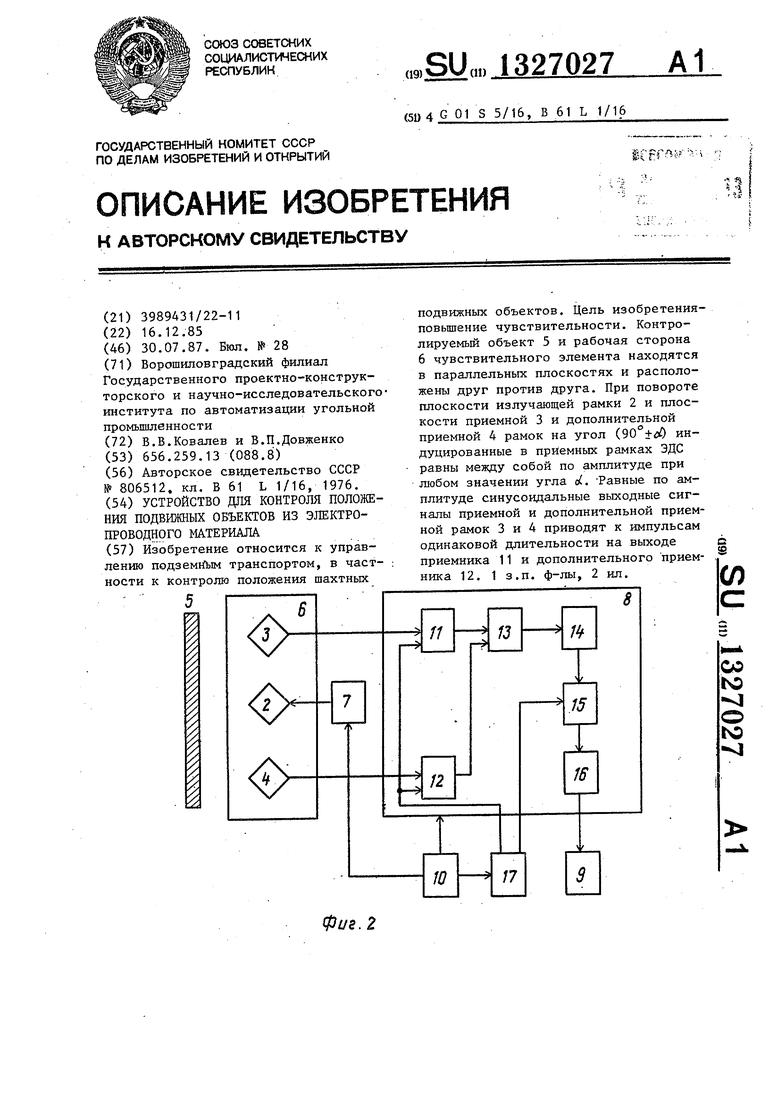
/
Составитель Ю.Барьшев Редактор А.Лежнина Текред jfl.CepAroKOBa Корректор Г.Решетник
Заказ 3385/42 Тираж 730 . Подписное ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприят:ие, г.Ужгород, ул.Проектная, 4
фае.
| Датчик контроля положения движущихсяОб'ЕКТОВ | 1976 |
|
SU806512A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
