I
Изобретение относится к датчика контроля положения движущихся объектов и может найти применение для контроля положения, например шахтных вагонеток, скипов и т.д.
Наиболее близким к предлагаемому по технической сущности является датчик контроля положения, содержа-, щий приемник со схемой совпадения, передающую и приемную антенны, сетевой трансформатор,одна из вторичных обмоток которого подключена к генератору зондирующих импульсов, В1атолненному в виде импульсного трансформатора с обмоткой цепи синхронизацнн приемника, генератор синхроимпульсов и регистратор.
Однако в известном датчике для сохранения неизменньш условий экранирования импульсы тока в передающей антенне при изменении напряжения питающей сети должны Сыть неизменны по амплитуде, для чего используется феррорезонансный стабилизатор, который имеет низкий коэффициент полезного действия (40%-60%), большое магнитное поле рассеяния, зависимость стабилизации от частоты питающей сети, большой вес и размеры при значительных
мощностях, а следовательно, и относительно высокую стоимость.
Кроме того, феррорезонансный стабилизатор нетехнологичен и предъявляет весьма жесткие требования к качеству трансформаторного железа. Блок питания с феррорезонансным стабилизатором составляет 70% всего объема датчика, что во взрывоопасной оболочке значительно увечивает вес датчика. Питание генератора импульсов постоянным напряжением осуществляется высоковольтным выпрямителем, имеющим большие габариты и требукяцим специальные средства для охлаждения.
Запуск генератора импульсов в схеме датчика контроля положения Ьсуществляется от специального блока, состоящего из задающего и выходго блокинг-генераторов, выполненных на транзисторах, что также усложняет схему, наладку и снижает технологичность устройства параметры
выходного:сигнсша этих блокинг-ге-. нераторов сильно зависят от температуры. Устройство Обладает низкой точностью регистрации положения движущихся объектов при наличии нестабильности напряжения сети.
Цель изобретения - повышение точности регистрации при наицичии нестабильности напряжения сети путем синхронизации времени запуска генератора зондирующих импульсов с напряже -нием сети.
Поставлянная цель достигается тем что в датчик контроля положения движущихся объектов, содержащий приемник со схемой совпадения, передающую и приемную антенны, сетевой трансформатор, одна из вторичных обмоток которого подключена к генератору зондирую«дих импульсов, вьшолненному в виде импульсного трансформатора с обмоткой цепи синхронизации приемника, генератор синхроимпульсов и регистратор, в сетевой трансформатор введены две дополнительные обмотки, одна из которых подключена к генератору синхроимпульсов, представляющему собою управляемый тиристорный одновибратор, выход которого подклночен ко входу генератора зондирующих импульсов, а управляющий электрод тиристора управляемого тиристорного одновибратора через формирователь импульсов подключен к второй дополнительной обмотке сетевого трансформатора.
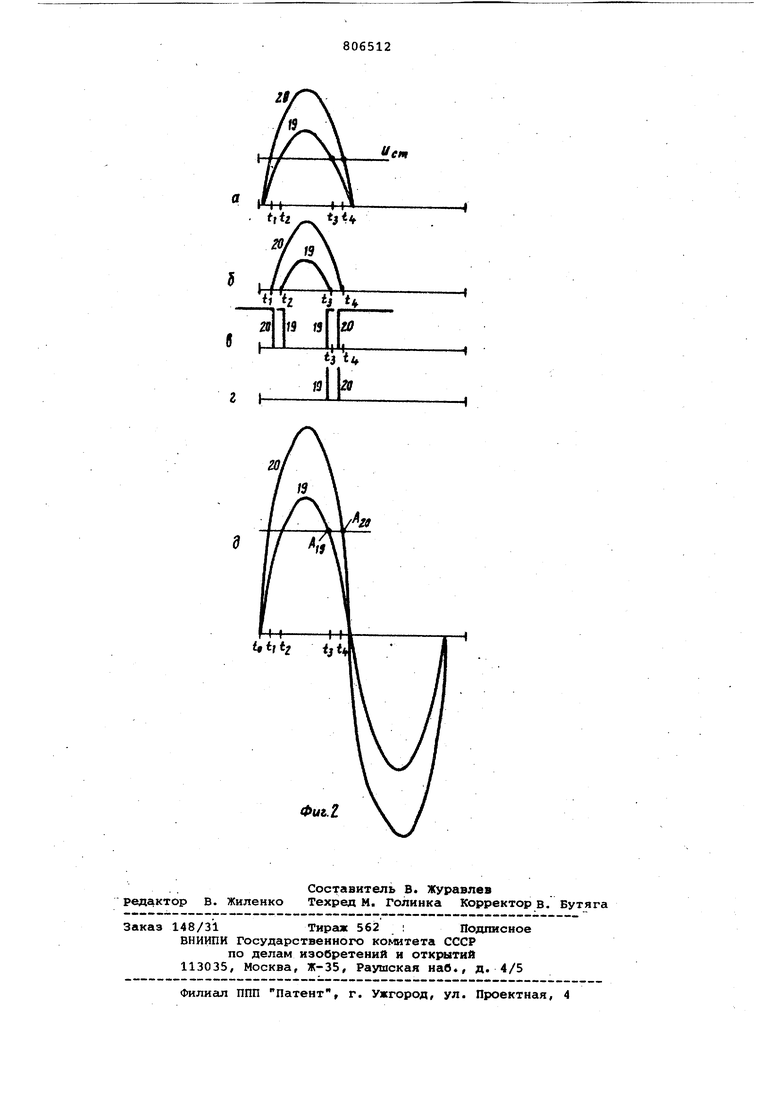
На фиг.1 представлена принципиальная электрическая схема датчика койтроля положения движущихся объектов; на фиг.2 а-д - временные лиarpaм ы напряжений/ поясняющие работу устройства.
Латчик контроля положения движущихся объектов содержит приемник 1, приемную 2 и передающую 3 антенны, игдпульсный трансформатор 4, сетевой трансформатор 5,генератор 6 импульсов , дополнительные 7 и 8 обмотки сетевого трансформатора 5, управляемый тиристорный одиовибрато 9, формирователь ГО ИМПУЛЬСОВ, содержаний диод 11, резистор 12, стбалитрон 13, делитель 14 напряжения, конденсатор 15, усилитель 16, эммитериый повторитель 17, электронный стабилизатор 18.
Датчик контроля положения работает следующим образом.
Во время положителbHcrft полуволшл напряжения питания напр51жеиие на обкладках конденсатсфа генератора импульсов 6 изменяется в полном соответствии с изменением напряжения питания (кривая 19 на фиг.2д) К стабилитрону 13 в это время приклада1Вается-однополупериодно« напряжение (кривая 19 на фиг.2а), амплитудное значение которого премлшает напряжение стабилизации стабилитрона 13. Поэтому стабилитрон 13 открывается в момент времени 1 фиг.2б), а в момент времени закрывается. Вследствие этого, на . вход усилителя 16 к интервале времени t-3 формирователя 10. импульсов поступает однополупериодное напряжение, превышающее напряжение С1абилизации стабилитрона 13,которое преобразуется усилителем 16 формирователя 10 импульсов в прямоg угольньй отрицательный импульс длительностью t - i (кривая 19 на фиг.2в). Этот импульс после прохождения через дифференцирукицую цепочку усилителя 16 формирователя 10 имO выходе эммитерного повторителя 17 преобразуется в короткие импульсы, длительностью 10-15 МКС, которые формируются в момент времени Ьз Этот импульс запускает
, управляемый тиристорный одновибра тор 9 (накопительный конденсатор
заряжен во время предалдущей полуволны напряжения питания). На выходе импульсного трансформатора 4 появляется мощный импульс, который идет
0 на запуск генератора 6 импульсоз и в цепь синхронизации приемника 1.
Напряжение на конденсаторе генератора 6 импульсов в этот момент
C равно и (точка А, кривой 19 на
фиг.2). Поэтому в передающей антенне в момент времени t формируется импульс тока, величина .которого соответствует напряжению Ug.
При увеличении напряжения питания (кривые с индексом 20 на всех диаграк лах момент закрытия стабилитрона 13 смещается по временной оси в точку i. Это влечет за собой смещение момента запуска тиристора
5 генератора 6 импульсов в точку i.
Следовательно, импульс тока в передакмдей 3 антенне формируется, когда конденсатор генератора 6 импульсов заряжен до напряжения U с (точка
А дКривой 20 на фиг.2д}. Т.е. при различных значениях напряжения питания тиристор генератора 6 импульсов открывается при одних и тех же значениях напряжения на его накопительном конденсаторе, что определяет неизменность амплитуды импульсов тока в передающей 3 и приемной 2 антенitax. Делителем 14 напряжения амплитудное значение импульсов тока в пе0 редакяцей 3 антенне может регулироваться в широких пределах.
Датчик контроля положения движуЩ1ХСЯ объектов по сравнению с известным имеет более высокую точность
, регистрации при наличии нестабильности напряжения сети позволяет увеличить КПД устройства за счет исключения неоправданных потерь в феррорезонансном стабилизаторе и на зарядном сопротивлении генератора импульсов,
О уменьшить габариты взрывобезопасной оболочки устройства,а, следовательно, и все ее со 120 до 40 кг. Повышается технологичность изготовления, так как исключается подгонка параметров в
5 процессе настройки. Согласно расчетам, в три раза снижается себестои.мость изделия.
Формула изобретения
Датчик контроля положения движущихся объектов, содержаний приемник со схемой совпадекия, передающую и приемную антенны, сетевой трансформатор, одна из вторичных оймоток которого подключена к генератору эодирукицих импульсов, выполненному в виде импульсного трансформатора с обмоткой цепи синхронизации приемника, генератор синхроимпульсов и регистратор, отличающийс я тем, что, с целью повьвиения точ ности регистрации при наличии нестабильности напряжения сети путем синхронизсщим времени запуска генератсфа зонд руювшх импульсов с напржением сети, в сетевой трансформатор введены две дополнительные обмотки, одна иэ которых подключена к генератору синхроимпульсов, представл}нш{ему собой управляемый тиристорный одяовибратор, выход котоtoрого подключен ко входу генератора зондирукяднх импульсов, а управляю1ЦИЙ электрод THimcTopa управляемого тнристорного одновибратора через форлшрователь импульсов подключен 1$ ко второй дополнительной обмотке сетевого трансформатора.
Чет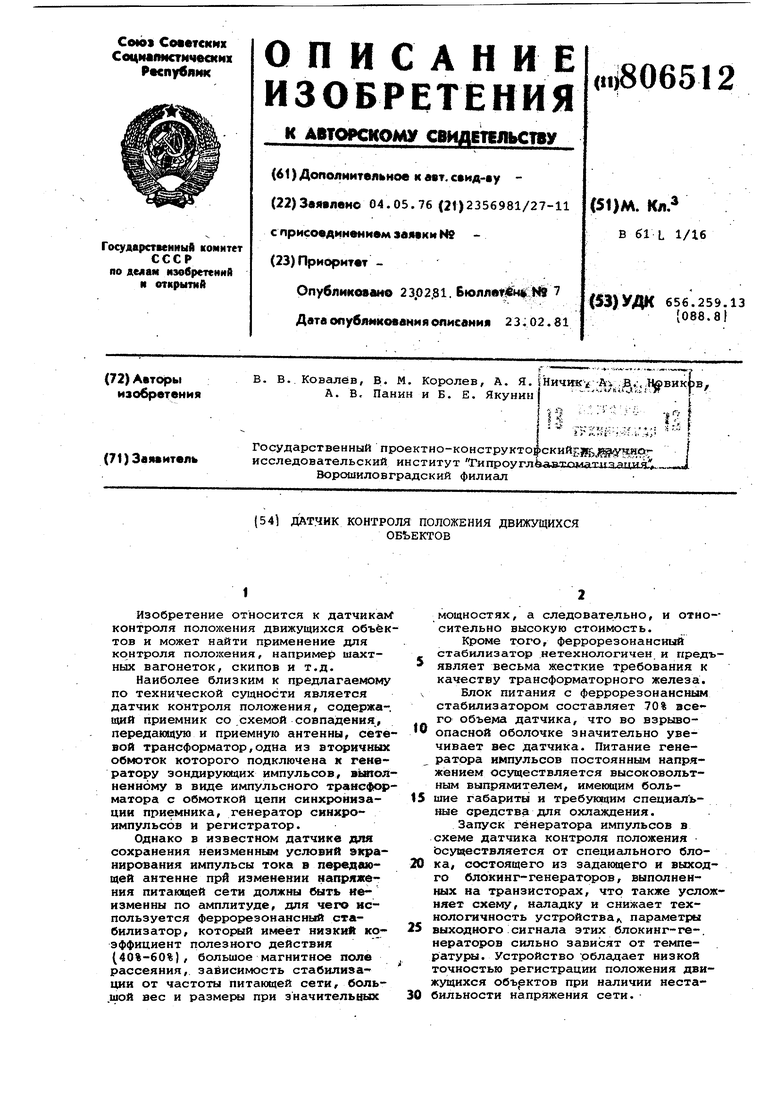
| название | год | авторы | номер документа |
|---|---|---|---|
| Система бесперебойного питания | 1983 |
|
SU1136254A1 |
| Стабилизированный выпрямитель | 1978 |
|
SU748381A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ В РАЗВЕТВЛЕННОЙ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ, СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА МЕЖДУФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ В РАЗВЕТВЛЕННОЙ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО КОНТРОЛЯ ТОКА И НАПРЯЖЕНИЯ ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372624C1 |
| Измеритель скорости движения воздуха | 1973 |
|
SU514199A1 |
| Датчик контроля положения объектов | 1988 |
|
SU1618689A1 |
| Трехфазный тиристорный ключ | 1979 |
|
SU851777A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ДВУХПРОВОДНОЙ ЛИНИИ СВЯЗИ | 1991 |
|
RU2022369C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2400387C1 |
| Бесконтактный датчик наличия магнитной массы | 1977 |
|
SU737978A1 |
| Устройство для определения междуфазных замыканий и замыканий на землю в сетях с изолированной нейтралью напряжением 6-10 кВ | 2022 |
|
RU2788035C1 |