5
10
20
2Ь
Изобретение относится к электротехнике и может быть использовано 5 в частности, для управления глубокорегулируемыми электродвигателями постоянного тока прокатных стонов, крупных металлорежущих станков и других механизмов.
Цель изобретения - расширение диапазона регулирования частоты вращения электродвигателя и повьгашние его надежности.
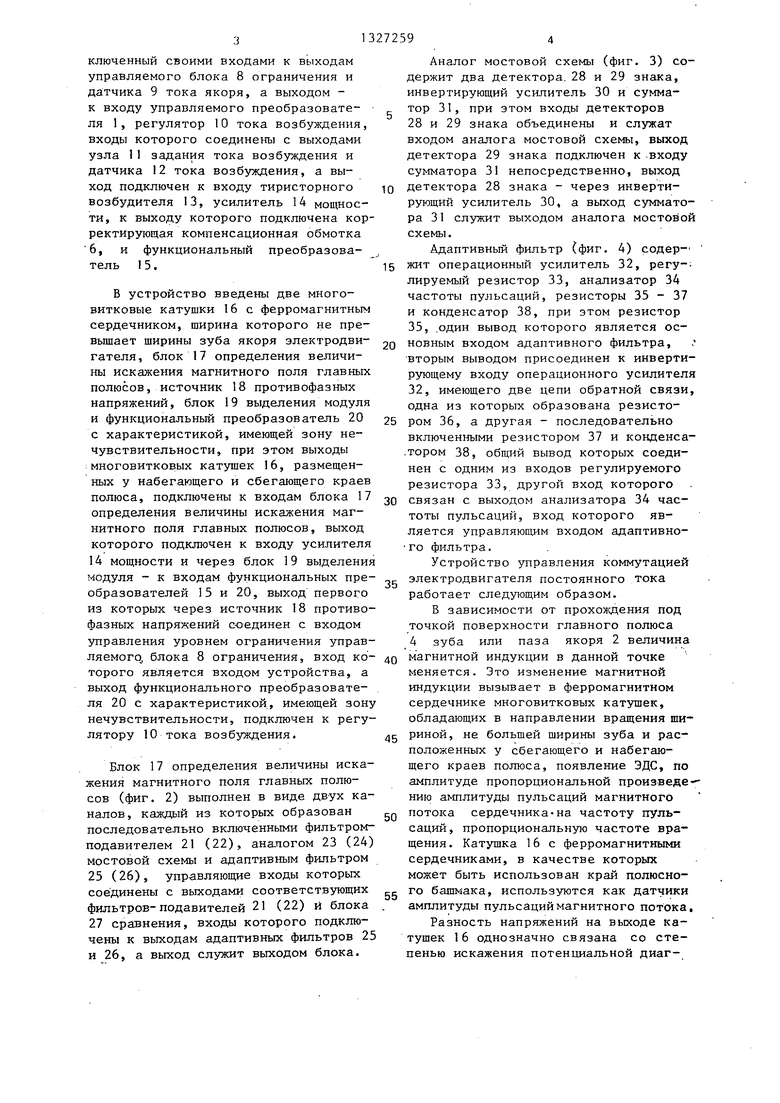
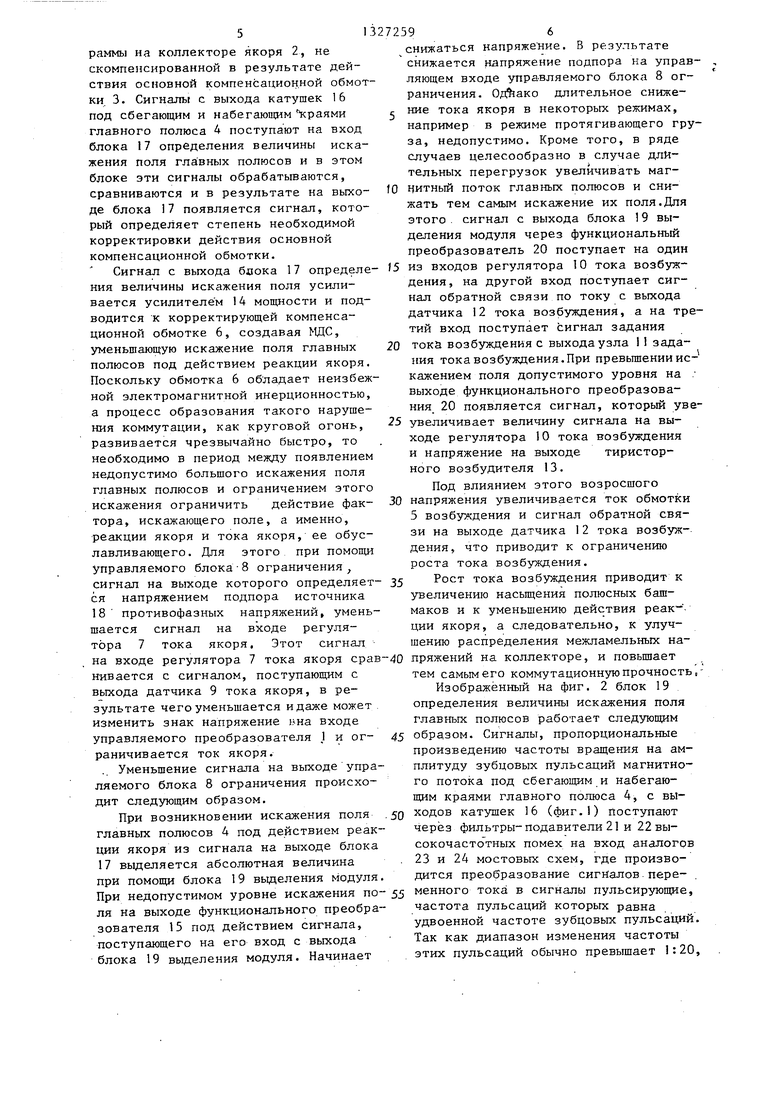
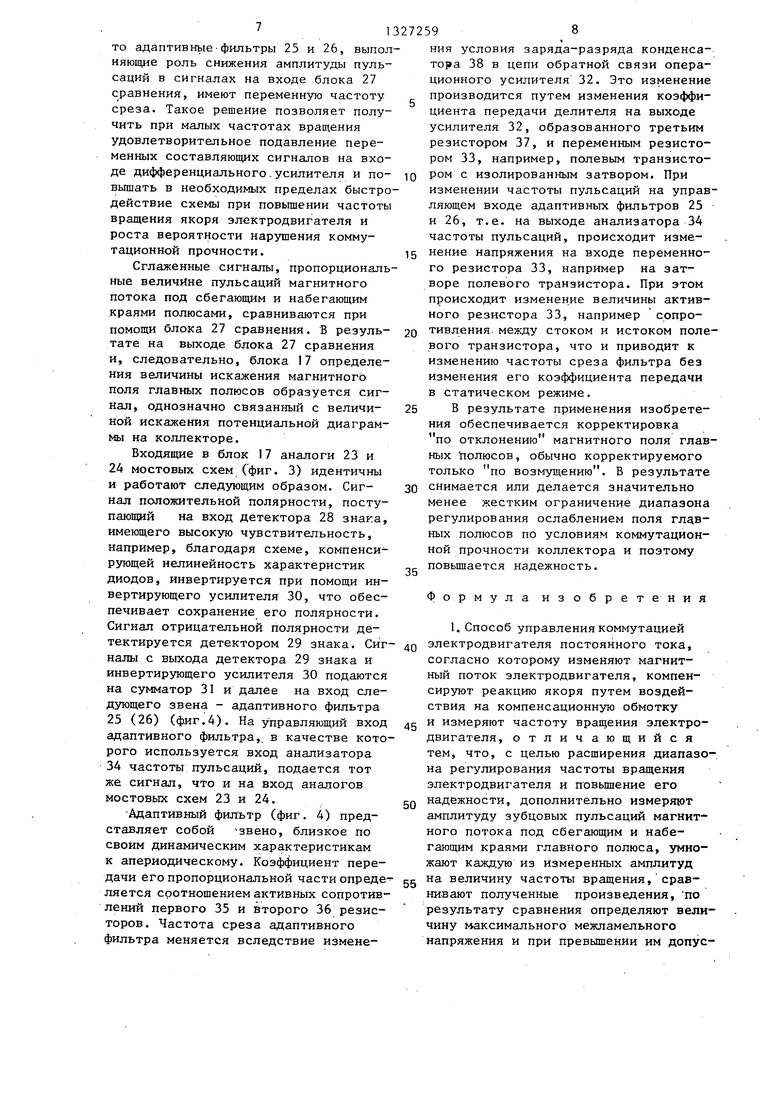
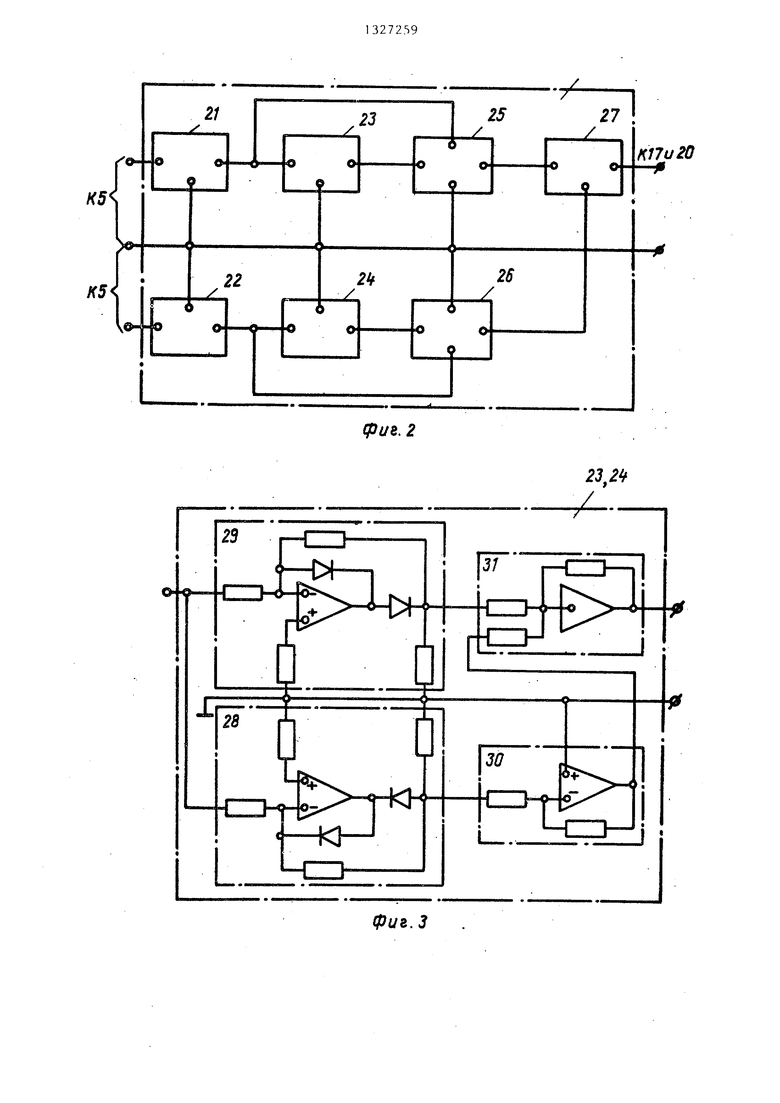
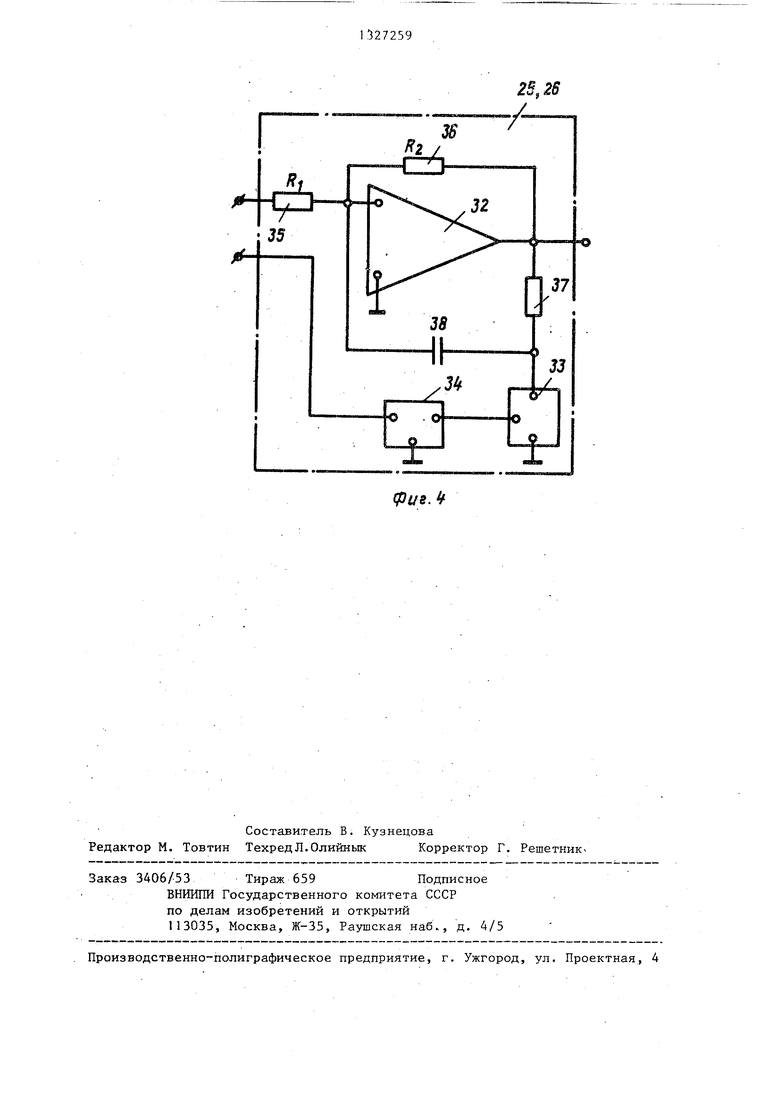
На фиг. 1 изображена функциональная схема устройства для управления коммутацией электродвигателя постоян- 15 ного тока; на фиг. 2 - схема блока определения величины искажения магнитного поля главных полюсов; на фиг. 3 - пример выполнения аналога мостовой схемы; на фиг. 4 - схема адаптивного фильтра.
Способ управления коммутацией электродвигателя постоянного тока осуществляют путем изменения магнитного пото- .ка электродвигателя и компенсации реакции якоря за счет воздействия на компенсационную обмотку.Дополнительно измеряют амплитуду зубцовых пульсаций магнитного потока под сбегающим и набегающим краями полюса. Величина амплитуды этих пульсаций однозначно связана с величиной магнитной индукции под сдвигающим и набегающим краями щеток. Умножают каждую из измеренных амплитуд на величину частоты вращения. Разность величин индукции под сбегающк м и набегающим краями полюса харак.теризует степень, искгикения магнитного поля, .а произведение приращения магнитного потока на зубцовом делении на величину частоты вращения пропорционально межламельному напряжению, т.е. основной .величине, определяющей коммутационную прочность коллектора. Вероятность возникновения кругового огня растет очень быст- .ро с превышением межламельным напряжением допустимого уровня, определяемого толщиной межламельной.изоляции и физико-химическими свойствами мате- gQ риала коллектора, в т.ч. наличием примесей щелочных и щелочно-земель- ных металлов. Сравнивают произведения величин, пропорциональных произ
мального межламельного напряжения и при превышении им допустимого уровн воздействуют на результирующий пото под сбегающим и набегающим краями главного полюса, уменьщая большее и произведений амплитуды пульсаций ма нитного потока на частоту вращения соответственно, увеличивая меньшее произведение указанных величин и одновременно при превышении максимал №1м межламельным напряжением допусти мого уровня уменьшают задание на ток якоря и увеличивают основной поток.
Воздействие по разным каналчам при превышении максимальным межламельным напряжением допустимого уровня осуществляют по следующей причине.
Степень возможной минимизации раз ностного сигнала путем воздействия на МДС компенсационной обмотки определяется структурой системы регулиро вания и располагаемым коэффициентом усиления.
-В любом случае система автоматического регулирования вследствие наличия электромагнитных инерцион- ностей имеет ограниченное быстродействие. Поэтому из полученного раз ностного сигнала выделяют абсолютную величину (модуль) и при превышении абс6лю1 ной величиной допустимого уровня, т.е. при приближении искажения потенциальной диаграммы к опасному пределу, ограничивают величину тока якоря. Этот канал является бол быстродействующим, что позволяет при бЕ)1Стром изменении тока якоря снизить вероятность возникновения кругового огня. Одновременно, при недопустимо большом разностном сигнале начинают увеличивать ток возбуждения электродвигателя, который начинает расти с постоянной времени, большей, чем по д тоянная времени компенсационной обмотки. Таким образом, обеспечивают резервирование двух других систем, что обусловливает также увеличение надежности.
Устройство управления коммутацией электродвигателя постоянного тока (фиг. 1) содержит управляемый преобразователь 1, подключенный к послед вательно соединенным якорной 2 и ком
30
35
40
ведениям частоты вращения на амплиту- 55 пенсационной 3 обмоткам электродвигателя, на главных полюсах 4 которого расположены обмотка 5 возбуждени и корректирующая компенсационная обмотка 6, регулятор 7 тока якоря,под ды зубцовых пульсаций магнитного потока под сбегающим и набегающим-краями главного полюса, и по результату сравнения определяют величину макси- ;
5
0
0
2Ь
5
gQ
мального межламельного напряжения и при превышении им допустимого уровня воздействуют на результирующий поток под сбегающим и набегающим краями главного полюса, уменьщая большее из произведений амплитуды пульсаций магнитного потока на частоту вращения и, соответственно, увеличивая меньшее произведение указанных величин и одновременно при превышении максималь- №1м межламельным напряжением допустимого уровня уменьшают задание на ток якоря и увеличивают основной поток.
Воздействие по разным каналчам при превышении максимальным межламельным напряжением допустимого уровня осуществляют по следующей причине.
Степень возможной минимизации разностного сигнала путем воздействия на МДС компенсационной обмотки определяется структурой системы регулирования и располагаемым коэффициентом усиления.
-В любом случае система автоматического регулирования вследствие наличия электромагнитных инерцион- ностей имеет ограниченное быстродействие. Поэтому из полученного разностного сигнала выделяют абсолютную величину (модуль) и при превышении абс6лю1 ной величиной допустимого уровня, т.е. при приближении искажения потенциальной диаграммы к опасному пределу, ограничивают величину тока якоря. Этот канал является более быстродействующим, что позволяет при бЕ)1Стром изменении тока якоря снизить вероятность возникновения кругового огня. Одновременно, при недопустимо большом разностном сигнале начинают увеличивать ток возбуждения электродвигателя, который начинает расти с постоянной времени, большей, чем пос- д тоянная времени компенсационной обмотки. Таким образом, обеспечивают резервирование двух других систем, что обусловливает также увеличение надежности.
Устройство управления коммутацией электродвигателя постоянного тока (фиг. 1) содержит управляемый преобразователь 1, подключенный к последовательно соединенным якорной 2 и ком30
35
40
пенсационной 3 обмоткам электродвигателя, на главных полюсах 4 которого расположены обмотка 5 возбуждения и корректирующая компенсационная обмотка 6, регулятор 7 тока якоря,подключенный своими входами к выходам управляемого блока 8 ограничения и датчика 9 тока якоря, а выходом - к входу управляемого преобразовате- ля 1, регулятор 10 тока возбуждения, входы которого соединены с выходами узла 11 задания тока возбуждения и датчика 12 тока возбуждения, а выход подключен к входу тиристорного возбудителя 13, усилитель 14 мощности, к выходу которого подключена корректирующая компенсационная обмотка 6, и функциональный преобразова- тель 15.
В устройство введены две много- витковые катушки 16 с ферромагнитным сердечником, ширина которого не превышает ширины зуба якоря электродвигателя, блок 17 определения величины искажения магнитного поля главных полюсов, источник 18 противофазных напряжений, блок 19 выделения модуля и функциональный преобразователь 20 с характеристикой, имеющей зону нечувствительности, при этом выходы многовитковых катушек 16, размещенных у набегающего и сбегающего краев полюса, подключены к входам блока 17 определения величины искажения магнитного поля главных полюсов, выход которого подключен к входу усилителя 14 мощности и через блок 19 выделения модуля - к входам функциональных преобразователей 15 и 20, выход первого из которых через источник 18 противофазных напряжений соединен с входом управления уровнем ограничения управляемого блока 8 ограничения, вход которого является входом устройства, а выход функционального преобразователя 20 с характеристикой, имеющей зону нечувствительности, подключен к регулятору 10 тока возбуждения.
Блок 17 определения величины искажения магнитного поля главных полюсов (фиг. 2) выполнен в виде двух каналов, каждый из которых образован последовательно включенными фильтром- подавителем 21 (22), анаттогом 23 (24) мостовой схемы и адаптивным фильтром 25 (26), управляющие входы которых соединены с выходами соответствующих фильтров-подавителей 21 (22) и блока 27 сравнения, входы которого подключены к выходам адаптивных фильтров 25 и 26, а выход служит выходом блока.
5
0
5
Аналог мостовой схемы (фиг. 3) содержит два детектора. 28 и 29 знака, инвертирующий усилитель 30 и сумматор 31, при этом входы детекторов 28 и 29 знака объединены и служат входом аналога мостовой схемы, выход детектора 29 знака подключен к .входу сумматора 31 непосредственно, выход детектора 28 знака - через инвертирующий усилитель 30, а выход сумматора 31 служит выходом аналога мостовой схемы.
Адаптивный фильтр (фиг. 4) содер- жит операционный усилитель 32, регу-; лируемый резистор 33, анализатор 34 частоты пульсаций, резисторы 35 - 37 и конденсатор 38, при этом резистор 35, ,один вывод которого является основным входом адаптивного фильтра, вторым выводом присоединен к инвертирующему входу операционного усилителя 32, имеющего две цепи обратной связи, одна из которых образована резистором 36, а другая - последовательно включенными резистором 37 и конденса- .тором 38, общий вывод которых соединен с одним из входов регулируемого резистора 33, другой вход которого связан с выходом анализатора 34 частоты пульсаций, вход которого является управляющим входом адаптивного фильтра.
Устройство управления коммутацией электродвигателя постоянного тока работает следующим образом.
В зависимости от прохождения под точкой поверхности главного полюса 4 зуба или паза якоря 2 величина магнитной индукции в данной точке меняется. Это изменение магнитной индукции вызывает в ферромагнитном сердечнике многовитковых катушек, обладающих в направлении вращения шириной, не большей ширины зуба и расположенных у сбегающего и набегающего краев полюса, появление ЭДС, по амплитуде пропорциональной произведе-- нию амплитуды пульсаций магнитного потока сердечника-на частоту пульсаций, пропорциональную частоте вращения. Катушка 16 с ферромагнитными сердечниками, в качестве которых может быть использован край и олюсно- c го башмака, используются как датчики амплитуды пульсаций магнитного потока,
Разность напряжений на выходе катушек 16 однозначно связана со степенью искажения потенциальной диаг0
5
0
5
0
раммы на коллекторе якоря 2, не скомпенсированной в результате действия основной компенсационной обмотки 3. Сигналы с выхода катушек 16 под сбегающим и набегающим 1 раями главного полюса 4 поступают на вход блока 17 определения величины искажения поля гла;вных полюсов и в этом блоке эти сигналы обрабатьгоаются, сравниваются и в результате на выходе блока 17 появляется сигнал, который определяет степень необходимой корректировки действия основной компенсационной обмотки.
снижаться напряже ние. В результате снижается вдпрякение подпора на управ ляющем входе управляемого блока 8 ограничения. OfjfhaKo длительное сниже- г ние тока якоря в некоторых режимах, например в режиме протягивающего гру за, недопустимо. Кроме того, в ряде случаев целесообразно в случае длительных перегрузок увеличивать маг- 10 читный поток главных полюсов и снижать тем самым искажение их поля.Для этого . сигнал с выхода блока 9 выделения модуля через функциональный преобразователь 20 поступает на один
Сигнал с выхода баока 17 определе- )5 из входов регулятора 10 тока возбуж
ния величины искажения поля усиливается усилителе м 14 мощности и подводится к корректирующей компенсационной обмотке 6, создавая ЩС, уменьшающую искажение поля главных полюсов под действием реакции якоря. Поскольку обмотка 6 обладает неизбежной электромагнитной инерционностью, а процесс образования такого нарушения коммутации, как круговой огонь, развивается чрезвычайно быстро, то необходимо в период между появлением недопустимо большого искажения поля главных полюсов и ограничением этого искажения ограничить действие фактора, искажающего поле, а именно, реакции якоря И тока якоря, ее обуславливающего. Для этого при помощи управляемого блока-8 ограничения, сигнал на выходе которого определяет ся напряжением подпора источника 18 противофазных напряжений, уменьшается сигнал на входе регулятора 7 тока якоря. Этот сигнал
на входе регулятора 7 тока якоря срав- О пряжений на. коллекторе, и повьш1ает
нивается с сигналом, поступающим с выхода датчика 9 тока якоря, в результате чего уменьшается и даже может изменить знак напряжение вна входе управляемого преобразователя 1 и ограничивается ток якоря.
.. Уменьшение сигнала на выходе упра- ляемого блока 8 ограничения происходит следующим образом.
При возникновении искажения поля главных полюсов 4 под действием реакции якоря из сигнала на выходе блока 17 вьщеляется абсолютная величина при помощи блока 19 вьщеления модуля При недопустимом уровне искажения поля на выходе функционального преобразователя 15 под действием сигнала, поступающего на его вход с выхода блока 19 вьщеления модуля. Начинает
272596
снижаться напряже ние. В результате снижается вдпрякение подпора на управляющем входе управляемого блока 8 ограничения. OfjfhaKo длительное сниже- г ние тока якоря в некоторых режимах, например в режиме протягивающего груза, недопустимо. Кроме того, в ряде случаев целесообразно в случае длительных перегрузок увеличивать маг- 10 читный поток главных полюсов и снижать тем самым искажение их поля.Для этого . сигнал с выхода блока 9 выделения модуля через функциональный преобразователь 20 поступает на один
0
5
дения, на другой вход поступает сигнал обратной связи по току с выхода датчика 12 тока возбуждения, а на третий вход поступает сигнал задания тока возбуж,дения с выхода узла 1 1 задания тока возбуждения.При превьшгенииис- кажением поля допустимого уровня на . выходе функционального преобразования 20 появляется сигнал, который уве5 увеличивает величину сигнала на выходе регулятора 10 тока возбуждения и напряжение на выходе тиристор- ного возбудителя 13.
Под влиянием этого возросшого
0 напряжения увеличивается ток обмотки 5 возбуждения и сигнал обратной связи на выходе датчика 12 тока возбуждения, что приводит к ограничению роста тока возбуждения.
Рост тока возбуждения приводит к увеличению насьпцения полюсных башмаков и к уменьшению действия ции якоря, а следовательно, к улучшению распределения межламельных натем самым его коммутационную прочность,Изображённый на фиг. 2 блок 19 определения величины искажения поля главшэ1х полюсов работает следующим
образом. Сигналы, пропорциональные произведению частоты вращения на амплитуду зубцовых пульсаций магнитного потока под сбегающим и набегаю- щим краями главного полюса 4, с выходов катушек 16 (фиг.1) Поступают через фильтры-подавители 21 и 22 высокочастотных помех на вход аналогов 23 и 24 мостовых схем, где производится преобразование сигналов переменного тока в сигналы пульсирующие, частота пульсаций которых равна удвоенной частоте зубцовых пульсаций. Так как диапазон изменения частоты этих пульсаций обычно превышает 1:20,
то адаптивньге-фильтры 25 и 26, выполняющие роль снижения амплитуды пульсаций в сигналах на входе блока 27 сравнения, имеют переменную частоту среза. Такое решение позволяет получить при малых частотах вращения удовлетворительное подавление переменных составляющих сигналов на входе дифференциального.усилителя и по- вьшать в необходимых пределах быстродействие схемы при повышении частоты вращения якоря электродвигателя и роста вероятности нарушения коммутационной прочности.
Сглаженные сигналы, пропорциональные величине пульсаций магнитного потока под сбегающим и набегающим краями полюсами, сравниваются при помощи блока 27 сравнения. В результате на выходе блока 27 сравнения и, следовательно, блока 17 определения величины искажения магнитного поля главных полюсов образуется сигнал, однозначно связанный с величиной искажения потенциальной диаграммы на коллекторе.
Входящие в блок 17 аналоги 23 и
24мостовых схем (фиг. 3) идентичны и работают следующим образом. Сигнал положительной полярности, поступающий на вход детектора 28 знака, имеющего высокую чувствительность, например, благодаря схеме, компенси РЗтащей нелинейность характеристик диодов, инвертируется при помощи инвертирующего усилителя 30, что обеспечивает сохранение его полярности. Сигнал отрицательной полярности детектируется детектором 29 знака. Сигналы с выхода детектора 29 знака и инвертирующего усилителя 30 подаются на сумматор 31 и далее на вход следующего звена - адаптивного фильтра
25(26) (фиг.4). На управляющий вход адаптивного фильтра,, в качестве которого используется вход анализатора
34 частоты пульсаций, подается тот же сигнал, что и на вход аналогов мостовьк схем 23 и 24.
Адаптивный фильтр (фиг. 4) представляет собой -звено, близкое по своим динамическим характеристикам к апериодическому. Коэффициент передачи его пропорциональной части опреде ляется соотношением активных сопротивлений первого 35 и второго 36 резисторов. Частота среза адаптивного фильтра меняется вследствие измене
5
0
5
g
0
5
0
5
0
ния условия заряда-разряда конденсатора 38 Б цепи обратной связи операционного усилителя 32. Это изменение производится путем изменения коэффициента передачи делителя на выходе усилителя 32, образованного третьим резистором 37, и переменным резистором 33, например, полевым транзистором с изолированным затвором. При изменении частоты пульсаций на управляющем входе адаптивных фильтров 25 и 26, т.е. на выходе анализатора 34 частоты пульсаций, происходит изменение напряжения на входе переменного резистора 33, например на затворе полевого транзистора. При этом происходит изменение величины активного резистора 33, например сопротивления между стоком и истоком полевого транзистора, что и приводит к изменению частоты среза фильтра без изменения его коэффициента передачи в статическом режиме.
В результате применения изобретения обеспечивается корректировка по отклонению магнитного поля главных болюсов, обычно корректируемого только по возмущению. В результате снимается или делается значительно менее жестким ограничение диапазона регулирования ослаблением поля глдв- ных полюсов по условиям коммутационной прочности коллектора и поэтому повышается надежность.
Формула изобретения
1. Способ управления коммутацией электродвигателя постоянного тока, согласно которому изменяют магнитный поток электродвигателя, компенсируют реакцию якоря путем воздействия на компенсационную обмотку и измеряют частоту вращения электродвигателя, отличающийся тем, что, с целью расширения диапазона регулирования частоты вращения электродвигателя и п овьш1ение его надежности, дополнительно измеряк)т амплитуду зубцовых пульсаций магнитного потока под сбегающим и набегающим краями главного полюса, умножают кажд,ую из измеренных амплитуд на величину частоты вращения, сравнивают полученные произведения, по результату сравнения определяют величину максимального межламельного напряжения и при превышении им допустимого уровня воздействзггот на результирующий поток под сбегающим и набегающим краями главного полюса, уменьшая большее из произведения амплитуды пульсаций магнитного потока на частоту вращения и соответственно увеличивая меньшее произведение указанных величин, и одновременно при превышении максимальным меж- ламельным напряжением допустимого уровня уменьшают задание ни ток якоря и увеличивают основной поток.
2. Устройство для управления ком мутацией электродвигателя постоянно- то тока, содержащее управляемый преобразователь, подключенный к последовательно соединенным якорной и ком пенсационной обмоткам электродвигателя постоян 1ого тока, на главных полюсах которого расположены обмотка возбуждения и корректирующая компенсационная обмотка, регулятор тока якоря, подключенный своими входа- №1 к выходам управляемого блока ограничения и датчика тока якоря, а выходом - к входу управляемого преобразователя, регулятор тока возбуждения, входы которого соединены с выходами узла задания тока возбулоде- ния и датчика тока возбуждения, а выход подключен к входу тиристорно- го возбудителя, усилитель мощности, к выходу которого подключена корректирующая компенсационная обмотка, и первый функциональный преобразователь, отличающееся тем, что в него введены две многовитковые катушки с ферромагнитным сердечником, ширина которого не . превьш ает ширины зуба якоря.электродвигателя, блок определения величины искажения магнитного поля главных полюсов, источник противофазных напряжений, блок выделения модуля и функциональный преобразователь с характеристикой, имеющей зону нечувствительности при этом выходы многовитковых катушек, размещенных у набегающего и сбегающего краев полюса, подключены к входам блока определения величины искажения магнитного поля главных полюсов, выход которого подключен к входу усилителя мощности и через блок выделения модуля - к входам функциональных преобразователей, выход первого из которых через ис2725910
точник противофазных напряжений соединен с входом управления уровнем ограничения управляемого блока ограничения, вход которого является
. входом устройства, а выход второго . функционального преобразователя с характеристикой, имеющей зону нечувствительности, подключен к , гулятору тока возбуждения.
3, Устройство по п. 2, о т л и - чающееся тем, что блок определения величины искажения магнитного поля главных полюсов выполнен в
. виде двух кангшов, каждый из которых образован последовательно включенными фильтром-подавителем, аналогом- мостовой схемы и адаптивным фильтром, управляющие входы которых соединены
2Q с выхода1 -ш соответствующих фильтров- подавителей, и блока сравнения, входы которого подключены к выходам адаптивных фильтров, а выход служит выходом блока.
25 .4- Устройство по пп. 2 и 3, отличающееся тем, что аналог мостовой схемы содержит два детектора знака, инвертирующий усилитель и сумматор, при этом входы детекто3Q ров знака объединень и служат входом аналога мостовой схемы, выход одного детектора знака подключен к входу сумматора непосредственно, выход второго - через инвертирующий усилитель, . а выход сумматора служит выходом аналога мостовой схем1)1.
5. Устройство по пп. 2 - 4, о т - л и ч а ю щ е е с я тем, что адаптивный фильтр содержит операционный усилитель, регулируемое сопротивление, анализатор частоты пульсаций, три -резистора и конденсатор, при этом первый резистор, один вывод которого является основным входом адаптивного фильт-ра, вторым выводом присоединен к инвертирующему входу операционного усилителя, имеющего две цепи обратной связи, одна из которых образована вторым резистором, а другая - последовательно включенными третьим резистором и конденсатором, общий вывод которых соединен с одним из входов регулируемого сопротивления, другой вход которого связан с выходом анализатора частоты пульсаций, вход которого является управляющим входом адаптивного фильтра.
35
40
45
50
55
Cpu6,2
фиг. 3
25,26
J«
33 /
or
Составитель В. Кузнецова Редактор М. Товтин Техред Л. Олийнык Корректор Г. Решетник
Заказ 3406/53 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 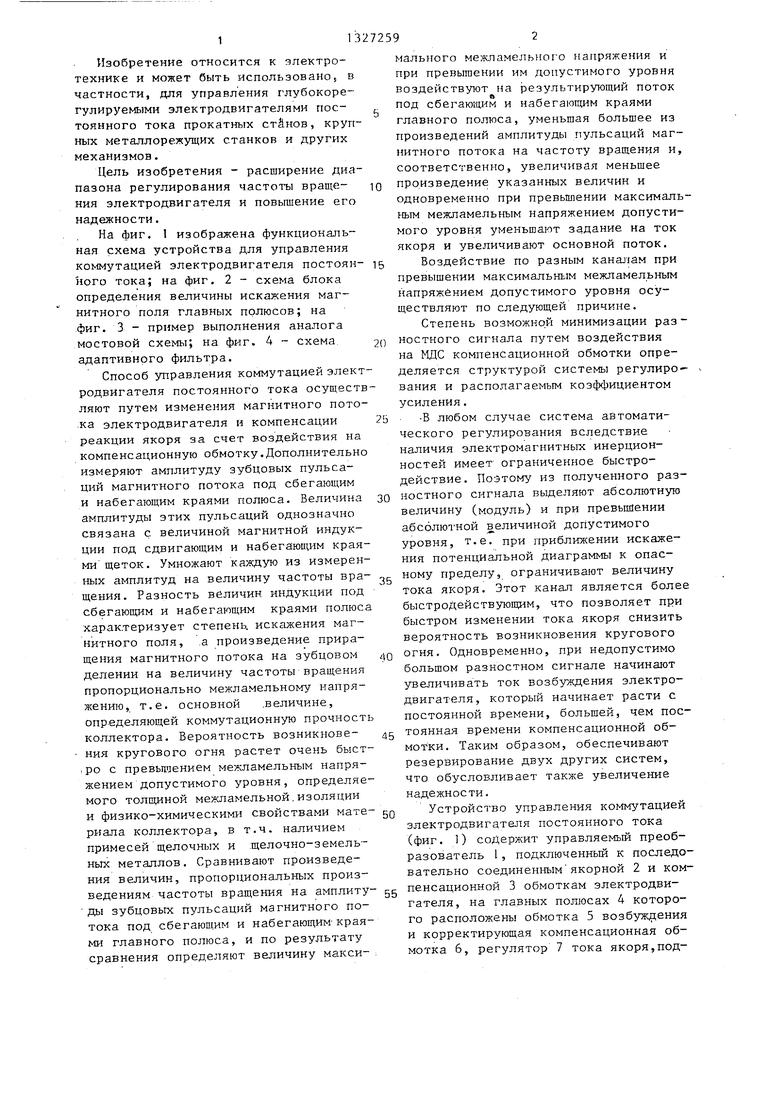
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управлеия электродвигателем постоянного тока и устройство для его реализации | 1979 |
|
SU873367A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Электродвигатель постоянного тока | 1978 |
|
SU775827A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1977 |
|
SU653708A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОММУТИРУЮЩЕГО ПОЛЯ КОЛЛЕКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2003 |
|
RU2251780C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С УСТРОЙСТВОМ ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 1991 |
|
RU2007821C1 |
| Устройство для защиты машины постоян-НОгО TOKA OT КРугОВОгО ОгНя | 1976 |
|
SU838927A1 |
| Устройство для улучшения коммутации коллекторных электрических машин | 1982 |
|
SU1029339A1 |
| Электрическая машина постоянного тока | 1976 |
|
SU603061A1 |
.Изобретение относится к электротехнике и может быть использовано для управления электродвигателями прокатных станов. Целью изобретения является расширение диапазона регулирования частоты вращения электродвигателя и повышение его надежности. Уст ройство содержит многовитко- вые катушки 16, размещенные у набегающего и сбегающего краев полюса, подключенные к входам блока 17 определения, величины искажения магнитного поля главных полюсов. Выход блока 17 подключен к вхоДу усилителя 14 мощности и через блок 19 выделения модуля к входам функциональных преобразователей 15 и 20. Выход функционального преобразователя 15 через источник 18 противофазных напряжений соединен .с входом управления уровнем ограничения управляемого блока 8. В данном устройстве по измеренной амплитуде зубцовых пульсаций магнитного потока определяют величину максимального межламельного напряжения и при превышении им допустимого уровня воздействук;т f на результирующий поток под сбегающим и набегающим краями главного полюса, уменьшают задание на ток якоря и увеличивают основной поток. 2с. и 3 3. п. ф-лы, 4 ил. (Л 00 ю ND СЛ СО puf,t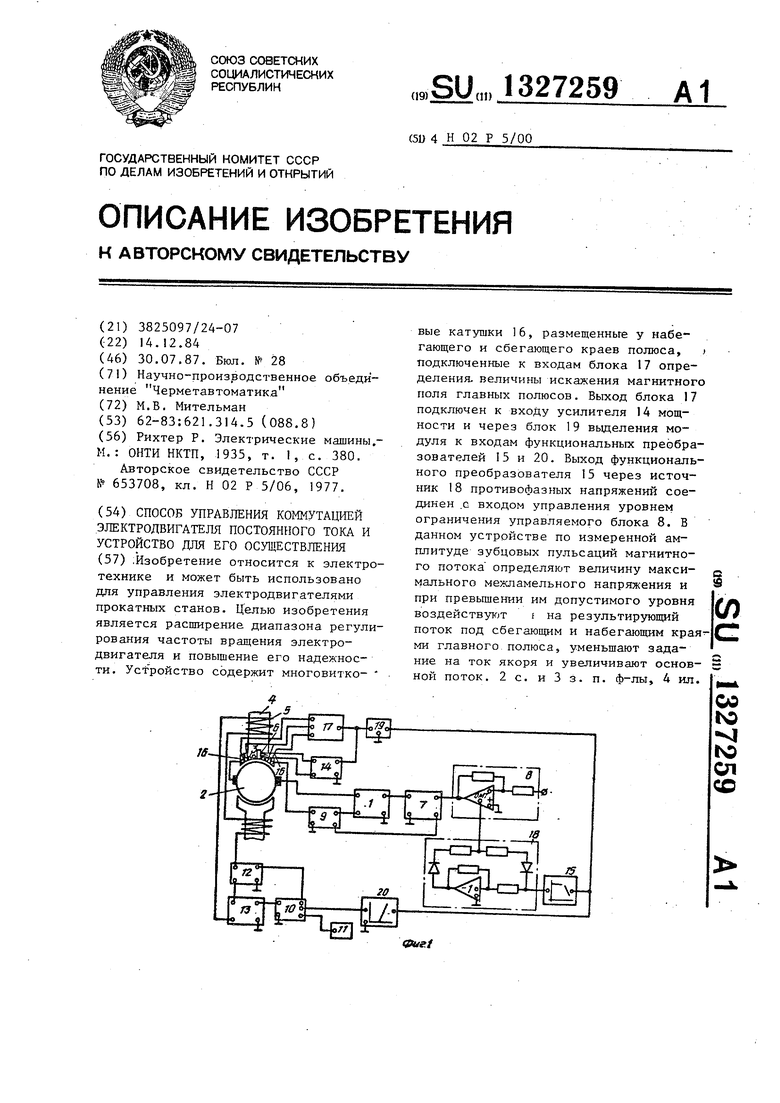
| Рихтер Р | |||
| Электрические машины,- М.: ОНТИ НКТП, 1935, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Велосипед, приводимый в движение силой тяжести едущего | 1922 |
|
SU380A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1977 |
|
SU653708A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
