Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе для защиты электро- хдвигателей постоянного тока от перегрузок.
Цель изобретения - повышение надежности защиты путем увеличения точности определения перегрева обмотки якоря.
На фиг. 1 приведена схема устройства для осуществления предлагаемого способа; на фиг. 2 - перестраиваемая модель полного сопротивления обмотки якоря; на фиг. 3 - схема датчика ЭДС; на фиг. 4 - схема регулятора тока якоря; на фиг. 5 - передаточные характеристики блоков нелинейности.
Устройство (фиг. 1) содержит электродвигатель, включающий в себя магнитную систему 1 с главными полюсами 2, якорь 3 электродвигателя, обмотку 4 возбуждения и датчик 5 пульсаций магнитного потока, расположенный на главном полюсе 2 в непосредственной близости от расточки в зоне, где величина магнитного потока глаЕшого полюса не зависит от величины реакции якоря 3. Якорь 3 электродвигателя параллельно с датчиком 6 напряжения и последовательно с входом датчика 7 тока якоря 3 подключен к выходам вентильного преобразователя 8, вход которого присоединен к выходу регулятора 9 тока якоря 3. Первый вход регулятора 9 соединен с выходом регулятора 10 напряжения на якоре, а второй вход с выходом датчика 7 тока, входом масштабирующего усилителя 11 и первым входом перестраиваемой модели 12 полного сопротивления обмотки -якоря, второй (корректирующий) вход которой через блок 13 нелинейности, передаточная характеристика которого приведена на фиг. 5, подключен к выходу датчика 14 тока возбуждения. Последний последовательно с обмоткой 4 возбуждения присоединен к выходам вентильного возбудителя 15. Выход перестраиваемой модели 12 присоединен к одному из входов сумматора 16, другой вход которого присоединен к выходу датчика 17 ЭДС. Первый вход д,атчика 17 присоединен к выходу датчика 5 пульсаций магнитного потока, второй вход присоединен к выходу датчика 14 тока возбуждения, а третий вход присоединен к одному из входов узла 18 сравнения, к выходу датчика 6 напряжения, одно.му из входов регулятора 10 напряжения, другой вход которого присоединен к выходу блока 19 задания. Другой вход узла 18 сравнения присоединен к выходу сумматора 16, выход узла 18 сравнения присоединен к входу делимого блока 20 деления, вход делителя которого присоединен к выходу мас- и1табирующего усилителя 11. Выход блока 20 деления присоединен к третьему (ограничивающему) входу регулятора 9 тока.
Перестраиваемая модель 12 полного сопротивления обмотки якоря (фиг. 2) содер5
5
жит первый пропорциональный усилитель 21 вход которого, являющийся первым входом модели 12, присоединен к первому входу блока 22 умножения и к выходу интегратора 23, вход которого соединен с выходом второго пропорционального усилителя 24. Вход второго пропорционального усилителя 24 соединен с выходом третьего пропорционального усилителя 25 и с одним из входов сумматора 26, вход третьего пропорционального усилителя 25 - с выходом блока 22 умножения. Другой вход сумматора 26 присоединен к выходу первого пропорционального усилителя 21. Выход сумматора 26 является выходом перестраиваемой модели 12 полного сопротивления обмотки якоря. Второй вход блока 22 умножения является вторым (корректирующим) входом модели 12.
Датчик 17 ЭДС (фиг. 3) содержит детектор 27 положительных сигналов, вход
0 которого является первым входом датчика 17 ЭДС и присоединен к входу детектора 28 отрицательных сигналов и к управляющему входу адаптивного фильтра 29. Основной вход адаптивного фильтра 29 присоединен через первый резистор 30 к выходу детектора 27 положительных сигналов и через инвертор 31 и второй резистор 32 к выходу детектора 28 отрицательных сигналов. Адаптивный фильтр 29 содержит операционный усилитель 33, вход которого яв0 ляется основным входом адаптивного фильтра 29 и .между входом и выходом которого включен третий резистор 34, выход операционного усилителя 33 присоединен к делителю напряжения, состоящему из четвертого резистора 35 и полевого транзистора 36
5 с изолированным затвором. Между средней точкой делителя и входом усилителя 33 включен конденсатор 37. Изолированный затвор полевого транзистора 36 подключен к выходу блока 38 измерения частоты пуль саций магнитного потока, вход которого является управляющим входом адаптивного фильтра 29. Выход операционного усилителя 33 является выходом адаптивного фильтра 29 и присоединен к одному из входов блока 39 нелинейности, другой вход которо5 го является вторым входом датчика 17 ЭДС. Выход блока 39 нелинейности, передаточная характеристика которого приведена на фиг. 6, присоединен к первому входу блока 40 формирО1зания знака ЭДС, второй вход которого является третьим входом датчи ка 17 ЭДС. Блок 40 формирования знака ЭДС состоит из операционного усилителя 41, инвертирующий вход которого присоединен к пятому резистору 42 и шестому резистору 43, а неинвертирующий вход присоединен
5 к седьмому резистору 44 и к выходу ключа 45. Вход ключа 45 через диод 46 присоединен к выходу компаратора 47. Первым входом блока 40 формирования знака ЭДС
является общая точка резисторов 42 и 44. Вход компаратора 47 является вторым входом блока 40 формирования знака ЭДС. Выход операционного усилителя 41, к которому присоединен второй вывод резистора 43, является выходом блока 40 формирования знака ЭДС и выходом датчика 17 ЭДС
Регулятор 9 тока (фиг. 4) состоит из пропорционально-интегрального усилителя 48, первый вход которого соединен с выходом ограничителя 49 максимального то- О ка, основной вход которого является первым входом регулятора 9 тока.
Ограничивающий вход ограничителя 49 максимального тока присоединен к выходу источника 50 противофазных подпирающих с напряжений, первый вход которого присоединен к выходу блока 51 нелинейности, а второй вход присоединен к источнику 52 постоянного напряжения. Второй вход пропорционально-интегрального усилителя 48
ли 12 полного сопротивления обмотки якоря 3, пропорционального падению напряжения в обмотке якоря 3. Так как величина тока очень мала, сигнал на выходе перестраиваемой модели 12 пренебрежимо мал, поэтому сигнал на выходе сумматора 16 практически равен ЭДС в обмотке якоря 3 электродвигателя. При этом ЭДС, наводимая в обмотке якоря 3, пропорциональна частоте вращения якоря 3 и величине магнитного потока главных полюсов и магнитной системы 1, возникающего под действием тока возбуждения. Магнитный поток в каждой точке, обращенной к расточке поверхности полюсного башмака главного полюса 2, пульсирует вследствие зубчатости якоря.
Для определения величины, пропорциональной ЭДС в обмотке якоря, используется обмотка, виток которой имеет щирину по направлению вращения не больще щирины
является также вторым входом регулятора 9 20 зуба якоря 3, расположенная в точке, где
25
тока. Вход блока 51 нелинейности является третьим (ограничивающим) входом регулятора 9 тока. Выход пропорционально-интегрального усилителя 48 является также выходом регулятора 9 тока.
Устройство (фиг. 1) работает следующим образом.
При отсутствии нагрузки на валу электродвигателя и «холодной обмотки якоря 3 по ней протекает малый ток холостого хода. Ток в обмотке 4 возбуждения определяется 30 напряжением на выходе вентильного возбудителя 15. Напряжение на выходе вентильного преобразователя 8 определяется сигналом на выходе регулятора 9 тока, который в этом режиме определяется соотношением сигнала задания на ток, поступающего на первый вход регулятора 9 и вырабатываемого регулятором 10 напряжения, и сигнала обратной связи по току, поступающего на второй вход регулятора 9 с выхода датчика 7 тока. При этом сигнал с выхода блока 20 деления, поступающий на третий (ограничивающий) вход регулятора 9 тока и пропорциональный перегреву или, что равноценно, изменению при нагреве сопротивления обмотки якоря 3 электродвигателя, практически равен нулю и не ограничивает сигнал на выходе регулятора 9 тока. Сигнал на выходе регулятора 10 напряжения определяется соотношением сигнала задания, поступающего на один из входов регулятора 10 с выхода блока 19 задания, и сигнала обратной связи по напряжению, поступающего на другой вход регулятора 10 с выхода датчика 6 напряжения.
Величина, пропорциональная напряжению на якоре 3 электродвигателя при ненагретой обмотке, получается путем суммирования с помощью сумматора 16 двух сигналов: сигнала с выхода датчика 17 ЭДС и сигнала с выхода перестраиваемой модеполе не искажается реакцией якоря. ЭДС от зубцовых пульсаций потока, наводимая в этой обмотке, будет пропорциональна частоте вращения и однозначно зависима от величины магнитного потока главных полюсов 2. Таким образом, ЭДС, наводимая в обмотке якоря 3, однозначно зависит от ЭДС, наводимой в указанной обмотке. Такая обмотка с ферромагнитным сердечником внутри образует датчик 5 пульсаций магнитного потока. Сигнал с выхода датчика 5 пульсаций магнитного потока поступает на вход датчика 17 ЭДС, где из него формируется сигнал, пропорциональный ЭДС в обмотке якоря 3 электродвигателя. Сигнал с выхода сумматора 16 поступает на один из входов 35 узла 18 сравнения, где сравнивается с сигналом, поступающим на другой вход узла 18 сравнения с выхода датчика 6 напряжения на якоре, практически равным ЭДС в обмотке якоря. Вследствие близости двух сравниваемых сигналов на выходе узла 18 сравнения, а следовательно, и на выходе блока 20 деления, получаются сигналы, близкие к нулю, что соответствует «холодной (ненагретой) обмотке якоря 3.
При разгоне и торможении электродвигателя и работе под нагрузкой происходит нагрев обмотки якоря 3. При этом величина падения напряжения при ненагретой . обмотке якоря 3 определяется уравнением: Дия Rc,,-« + L,(iB)(1)
40
45
50
55
Сигнал, пропорциональный AUj, получается при помощи перестраиваемой модели 12 полного сопротивления обмотки якоря 3 (фиг. 2). Эта схема работает следующим образом. Падение напряжения на активном сопротивлении (Ro) моделируется с помощью первого пропорционального усилителя 21, коэффициент передачи которого определяется сопротивлением ненагретой обли 12 полного сопротивления обмотки якоря 3, пропорционального падению напряжения в обмотке якоря 3. Так как величина тока очень мала, сигнал на выходе перестраиваемой модели 12 пренебрежимо мал, поэтому сигнал на выходе сумматора 16 практически равен ЭДС в обмотке якоря 3 электродвигателя. При этом ЭДС, наводимая в обмотке якоря 3, пропорциональна частоте вращения якоря 3 и величине магнитного потока главных полюсов и магнитной системы 1, возникающего под действием тока возбуждения. Магнитный поток в каждой точке, обращенной к расточке поверхности полюсного башмака главного полюса 2, пульсирует вследствие зубчатости якоря.
Для определения величины, пропорциональной ЭДС в обмотке якоря, используется обмотка, виток которой имеет щирину по направлению вращения не больще щирины
5
0
поле не искажается реакцией якоря. ЭДС от зубцовых пульсаций потока, наводимая в этой обмотке, будет пропорциональна частоте вращения и однозначно зависима от величины магнитного потока главных полюсов 2. Таким образом, ЭДС, наводимая в обмотке якоря 3, однозначно зависит от ЭДС, наводимой в указанной обмотке. Такая обмотка с ферромагнитным сердечником внутри образует датчик 5 пульсаций магнитного потока. Сигнал с выхода датчика 5 пульсаций магнитного потока поступает на вход датчика 17 ЭДС, где из него формируется сигнал, пропорциональный ЭДС в обмотке якоря 3 электродвигателя. Сигнал с выхода сумматора 16 поступает на один из входов 5 узла 18 сравнения, где сравнивается с сигналом, поступающим на другой вход узла 18 сравнения с выхода датчика 6 напряжения на якоре, практически равным ЭДС в обмотке якоря. Вследствие близости двух сравниваемых сигналов на выходе узла 18 сравнения, а следовательно, и на выходе блока 20 деления, получаются сигналы, близкие к нулю, что соответствует «холодной (ненагретой) обмотке якоря 3.
При разгоне и торможении электродвигателя и работе под нагрузкой происходит нагрев обмотки якоря 3. При этом величина падения напряжения при ненагретой . обмотке якоря 3 определяется уравнением: Дия Rc,,-« + L,(iB)(1)
0
5
Сигнал, пропорциональный AUj, получается при помощи перестраиваемой модели 12 полного сопротивления обмотки якоря 3 (фиг. 2). Эта схема работает следующим образом. Падение напряжения на активном сопротивлении (Ro) моделируется с помощью первого пропорционального усилителя 21, коэффициент передачи которого определяется сопротивлением ненагретой обмотки якоря 3. Второй и третий пропорциональные усилители 24 и 25 и иитегратор 23 вместе с блоком умножения 22 образуют дифференцирующее звено с переменным коэффициентом дифференцирования Тд(1р). Передаточная функция такого звена:
Ki
KiTiiP
X/, Л1 J-M г
тТтГГк .ir
1 + К, Кг .fj, -fi
КЛ-Р,(2)
где KI- коэффициент передачи третьего пропорционального усилителя 25; Кг- коэффициент передачи второго пропорционального усилителя 24; IB-ток возбуждения; Тя - постоянная времени интегратора 23. Величина К выбирается очень большой, поэтому
Тя о:П
-кГкТ
(3)
и передаточная функция диффенециируюше- го звена определяется выражением: WIP) К,-Т„-р оСяР.(4)
Изменение величины индуктивности 1-я(1в) Ki Ti, в зависимости от тока возбуждения осуществляется при помощи блока 22 умножения, на первый вход которого поступает сигнал с выхода датчика 7 тока, а на второй вход поступает сигнал с выхода блока 13 нелинейности, на вход которого
Сигнал с выхода регулятора 10 напряжения поступает на первый вход регулято- фа 9 тока, т. е. на основной вход ограничителя 49 максимального тока, на выходе которого образуется сигнал задания на ток Якоря 3, подаваемый на первый вход пропорционально-интегрального усилителя 48, на второй вход которого, являющийся также вторым входо.м регулятора 9 тока, подводится сигнал обратной связи по току с выхода датчика 7 тока (фиг. 1). При этом на выходе пропорционально-интегрального 20 усилителя 48 формируется сигнал, являющийся управляющим для вентильного преобразователя 8 (фиг. 1). Сигнал задания на максимально допустимый ток определяется напряжением на ограничивающем входе ограничителя 49 максимального тока, равны.м напряжению на выходе источника 50 противофазных подпирающих напряжений. На третий вход регулятора 9 тока, т. е. на вход блока 51 нелинейности, поступает сигнал с выхода блока 20 деления. При
25
поступает сигнал с выхода датчика 14 тока 30 температуре обмотки якоря 3 меньще допусвозбуждения. При этом передаточная характеристика блока 13 нелинейности (фиг. 5) задается по экспериментально снятой характеристике (i6) для данного электродвигателя. Полное падение напряжения в обмотке якоря 3 получается путем суммирования сигналов с выходов усилителей 21 и 25 на сумматоре 26. На выходе сумматора 16 (фиг. 1) получается сигнал, пропорциональный напряжению при ненагретой обмотке, равному сумме падения напряжения в обмотке якоря и ЭДС (Е), наводимой в обмотке якоря 3:
иж, дЬ я + Е R,,-« + L«c(i6)f- + Е.
35
тимой на выходе блока 51 нелинейности сигнал отсутствует, поэтому напряжение на выходе источника 50 определяется сигналом на его втором входе, т.е. напряжение.м источника 52 постоянного напряжения, которое задает максимально допустимый ток ненагретой обмотки якоря 3. При превыще- нии допустимой температуры на выходе блока 51 нелинейности появляется сигнал, снижающий напряжение на выходе источника jjQ 50 противофазных подпирающих напряжений, в результате чего снижается задание на максимально допусти.мый ток.
Сигнал от датчика 5 пульсаций магнитного потока, амплитуда которых определяет ЭДС, наводи.мую в обмотке датчика 5 пульСигнал от датчика 5 пульсаций магнитного потока, амплитуда которых определяет ЭДС, наводи.мую в обмотке датчика 5 пульДействительное значение напряжения при 45 саций магнитного потока, детектируется при
помощи детектора 27 положительных сигналов и детектора 28 отрицательных сигналов.
Инвертор 31 изменяет полярность сигнала на выходе детектора 28. Первый и второй резисторы 30 и 32 обеспечивают выравнивание коэффициентов передачи по каналам детектирования. Частота зубцовых пульсаций магнитного потока пропорциональна частоте вращения якоря 3 электронагреве обмотки якоря 3 выралсается зависимостью:
УЯ 1яРо(1 ) +Ья(1,) - + Е.
при нагретой
Р азность напряжений ненагретой обмотке равна
ли ил - Ояо i«-Ro°t--- t.
Сигнал, пропорциональный этой разности, получается на выходе узла 18 сравнения.
50
Е5еличина перегрева д1 получается на вы- 55 двигателя, диапазон регулирования которой
ходе блока 20 деления, на вход делимого которого поступает сигнал с выхода узла 18 сравнения, а на вход делителя поступает
обычно очень велик (1:20 и более).
Фильтр неизменной структуры, пара.мет- ры которого выбраны из условия фильтра
сигнал с выхода масштабирующего усилителя 11, на вход которого подается сигнал с выхода датчика 7 тока.
Сигнал с выхода блока 20 деления поступает на третий (ограничивающий) вход регулятора 9 тока (фиг. 1). Работа одного из возможных вариантов регулятора 9 тока с ограничивающим входом, приведенного на фиг. 4, рассмотрена ниже.
Сигнал с выхода регулятора 10 напряжения поступает на первый вход регулято- фа 9 тока, т. е. на основной вход ограничителя 49 максимального тока, на выходе которого образуется сигнал задания на ток Якоря 3, подаваемый на первый вход пропорционально-интегрального усилителя 48, на второй вход которого, являющийся также вторым входо.м регулятора 9 тока, подводится сигнал обратной связи по току с выхода датчика 7 тока (фиг. 1). При этом на выходе пропорционально-интегрального 0 усилителя 48 формируется сигнал, являющийся управляющим для вентильного преобразователя 8 (фиг. 1). Сигнал задания на максимально допустимый ток определяется напряжением на ограничивающем входе ограничителя 49 максимального тока, равны.м напряжению на выходе источника 50 противофазных подпирающих напряжений. На третий вход регулятора 9 тока, т. е. на вход блока 51 нелинейности, поступает сигнал с выхода блока 20 деления. При
5
тимой на выходе блока 51 нелинейности сигнал отсутствует, поэтому напряжение на выходе источника 50 определяется сигналом на его втором входе, т.е. напряжение.м источника 52 постоянного напряжения, которое задает максимально допустимый ток ненагретой обмотки якоря 3. При превыще- нии допустимой температуры на выходе блока 51 нелинейности появляется сигнал, снижающий напряжение на выходе источника 50 противофазных подпирающих напряжений, в результате чего снижается задание на максимально допусти.мый ток.
Сигнал от датчика 5 пульсаций магнитного потока, амплитуда которых определяет ЭДС, наводи.мую в обмотке датчика 5 пульсаций магнитного потока, детектируется при
обычно очень велик (1:20 и более).
Фильтр неизменной структуры, пара.мет- ры которого выбраны из условия фильтрации при низких частотах вращения, снижает быстродействие при высоких частотах. Поэтому для подавления переменных составляющих частоты пульсаций из сигнала применяется адаптивный фильтр 29 с постоянной времени, изменяющейся в зависимости от частоты вращения якоря 3 электродвигателя.
Операционный усилитель 33, третий резистор 34 и конденсатор 37 образуют апериодическое звено. Адаптация в этом фильтре осуществляется путем подачи аналогового сигнала, пропорционального частоте вращения или, что равноценно, пропорционального частоте пульсаций магнитного потока, на изолированный затвор полевого транзистора 36. В результате меняется сопротивление между истоком и стоком транзистора 36, меняется коэффициент деления делителя напряжения, образованного переходом сток-исток транзистора 36 и четвертым резистором 35, меняется ток заряда-разряда конденсатора 37 и частота среза фильтра 29. Аналоговый сигнал, пропорциональный частоте пульсаций, вырабатывается на выходе блока 38 измерения частоты пульса10
15
20
сигнал, пропорциональный ЭДС и имеющий полярность напряжения. Если напряжение имеет положительную полярность, то диод 46 заперт и на выходе ключа 45 сигнал отсутствует, в результате чего усилитель 41 работает как сумматор с входными резисторами седьмым 44 и пять1м 42 и шестым резистором обратной связи 43, причем отрицательная составляющая сигнала на инвертирующем выходе равна нулю.
Таким образом, усилитель 41 в этом режиме не изменяет знака ЭДС. В результате на выходе блока 40 получается сигнал, пропорциональный по величине ЭДС и имеющий знак напряжения.
Преимуществом данного изобретения является повышение надежности за счет точного определения перегрева обмотки якоря и ограничения этого перегрева путем снижения максимального значения тока якоря.
Формула изобретения
1. Способ защиты обмотки якоря электродвигателя от перегрева, при котором измеряют ток и напряжение якорной цепи
ций магнитного потока, к входу которого под- 25 электродвигателя, ток возбуждения и по их
водятся пульсации напряжения на входе датчика 5.
В результате на выходе адаптивного фильтра получается сигнал, пропорциональный ЭДС в датчике 5 пульсаций магнитного потока. С учетом рассеяния потока в зубцах при изменении тока возбуждения получается величина пропорциональная ЭДС, наводимой в обмотке якоря 3. Учет рассеяния осуществляется с помощью блока 39 нелинейности, на, один вход которого подается сигнал с выхода адаптивного фильтра 29, а на другой - сигнал с выхода датчика 14 тока возбуждения.
При этом передаточная характеристика блока 39 определяется экспериментально снятой для данного электродвигателя характеристикой (зависимость амплитуды зубцо- вых пульсаций от величины магнитного потока главных полюсов).
На выходе блока 39 получается сигнал, пропорциональный модулю ЭДС в обмотке якоря 3, который поступает на первый вход блока 40 формирования знака ЭДС. На второй вход этого блока, равно как и на вход компаратора 47, поступает сигнал с выхода датчика 6 напряжения. На выходе компара30
35
40
45
значениям определяют величину перегрева обмотки якоря, численно равную произведению тока якоря на величину изменения сопротивления обмотки якоря, с использованием измеренных параметров формируют напряжение, пропорциональное произведению тока якоря на перегрев обмотки якоря, которое используют для ограничения тока якоря, отличающийся тем, что, с целью по- выщения надежности защиты путем noBbinje- ния точности определения перегрева обмотки якоря, дополнительно определяют ЭДС в обмотке якоря электродвигателя, по величине тока возбуждения определяют индуктивность якорной цепи и с учетом тока якорной цепи определяют падение напряжения в ненагретой обмотке якоря, которое суммируют с ЭДС в обмотке якоря, полученное напряжение, пропорциональное напряжению в ненагретой обмотке якоря, сравнивают с измеренным напряжением якорной цепи, полученное напряжение делят на ток якорной цепи и результат деления, пропорциональный перегреву обмотки якоря, используют для ограничения тока якоря.
2. Способ по п. 1, отличающийся тем, что величину ЭДС, обмотки якоря опредетора 47 получается сигнал постоянной ам- JQ ляют по измеренной амплитуде и частоте плитуды, имеющий полярность напряжения. Если этот сигнал имеет отрицательную полярность, то диод 46 открыт и на выходе ключа 45 получается сигнал, подпирающий неинвертирующий вход операционного усилителя 41, в результате чего он работает 55 как обычный инвертор, так как величины пятого и щестого резисторов 42 и 43 одинаковы. На выходе усилителя 41 получается
пульсации магнитного потока в точке поверхности главного полюса, расположенной на его геометрической оси, по амплитуде пульсаций определяют величину потока главного полюса, с учетом характеристики, представленной на фиг. 6, по частоте пульсаций определяют частоту вращения якоря электродвигателя, а ЭДС якоря электродвигателя определяют как величину, пропорцио
5
0
сигнал, пропорциональный ЭДС и имеющий полярность напряжения. Если напряжение имеет положительную полярность, то диод 46 заперт и на выходе ключа 45 сигнал отсутствует, в результате чего усилитель 41 работает как сумматор с входными резисторами седьмым 44 и пять1м 42 и шестым резистором обратной связи 43, причем отрицательная составляющая сигнала на инвертирующем выходе равна нулю.
Таким образом, усилитель 41 в этом режиме не изменяет знака ЭДС. В результате на выходе блока 40 получается сигнал, пропорциональный по величине ЭДС и имеющий знак напряжения.
Преимуществом данного изобретения является повышение надежности за счет точного определения перегрева обмотки якоря и ограничения этого перегрева путем снижения максимального значения тока якоря.
Формула изобретения
1. Способ защиты обмотки якоря электродвигателя от перегрева, при котором измеряют ток и напряжение якорной цепи
0
0
5
значениям определяют величину перегрева обмотки якоря, численно равную произведению тока якоря на величину изменения сопротивления обмотки якоря, с использованием измеренных параметров формируют напряжение, пропорциональное произведению тока якоря на перегрев обмотки якоря, которое используют для ограничения тока якоря, отличающийся тем, что, с целью по- выщения надежности защиты путем noBbinje- ния точности определения перегрева обмотки якоря, дополнительно определяют ЭДС в обмотке якоря электродвигателя, по величине тока возбуждения определяют индуктивность якорной цепи и с учетом тока якорной цепи определяют падение напряжения в ненагретой обмотке якоря, которое суммируют с ЭДС в обмотке якоря, полученное напряжение, пропорциональное напряжению в ненагретой обмотке якоря, сравнивают с измеренным напряжением якорной цепи, полученное напряжение делят на ток якорной цепи и результат деления, пропорциональный перегреву обмотки якоря, используют для ограничения тока якоря.
2. Способ по п. 1, отличающийся тем, что величину ЭДС, обмотки якоря определяют по измеренной амплитуде и частоте
пульсации магнитного потока в точке поверхности главного полюса, расположенной на его геометрической оси, по амплитуде пульсаций определяют величину потока главного полюса, с учетом характеристики, представленной на фиг. 6, по частоте пульсаций определяют частоту вращения якоря электродвигателя, а ЭДС якоря электродвигателя определяют как величину, пропорцио9 2 90 010
нальную произведению магнитного потокавозбуждения, а третий вход присоединен к
на частоту вращения.выходу датчика напряжения якоря.
4. Устройство по п. 3, отличающееся тем,
3. Устройство для защиты электродвига-что перестраиваемая модель полного сопротеля от перегрева якоря, содержащее элек-тивления обмотки якоря содержит три протродвигатель постоянного тока, вентильныйпорциональных усилителя, второй сумматор,
преобразователь в цепи якоря и вентильныйинтегратор и блок умножения, причем вывозбудитель в цепи возбуждения, регулято-ход первого пропорционального усилителя
ры и датчики тока и напряжения якоря,присоединен к одному из входов су.мматора,
датчик тока возбуждения, блок аелиней-другой вход которого присоединен к входу
ности, блок задания, напряжения якоря, второго пропорционального усилителя и к высумматор, причем выход блока задания сое-ходу третьего пропорционального усилителя,
динен с одним из входом регулятора напря-вход которого присоединен к выходу блока
жения якоря, выход которого соединен сумножения, выход второго пропорциональпервым входом регулятора тока, выход ре-ного усилителя присоединен к входу интегулятора тока соединен с входом вентиль- гратора, выход которого присоединен к перного преобразователя, выходы которого пос-вому входу блока умножения и входу перледовательно с входом датчика тока якорявого пропорционального усилителя, являюприсоединены к якорю электродвигателя,щемуся первым входом .модели, второй вход
параллельно которому подключен датчик на-блока умножения ЯЕияется также вторым
пряжения якоря, выход датчика напряже-входом модели, а выход сумматора являетния якоря соединен с другим входом регуля-20 ся выходом модели.
тора напряжения якоря, а выход датчика5. Устройство по п. 3, отличающееся тем, тока якоря соединен с вторым входом регу-что датчик ЭДС состоит из детекторов поло- лятора тока якоря, вход датчика тока воз-жительных и отрицательных сигналов, инвер- буждения последовательно с обмоткой воз-тора, адаптивного фильтра, блока нелиней- буждения присоединен к выходам вентиль-25 ности, блока формирования знака ЭДС и ного возбудителя, а выход - к входу блокадвух резисторов, причем вход детектора по- нелинейности, отличающееся тем, что, с це-ложительных сигналов, являющийся первым лью повыщения надежности защиты путемвходом датчика ЭДС присоединен к входу увеличения точности определения перегре-детектора отрицательных сигналов и к уп- ва обмотки якоря, в него введены датчикравляющему входу адаптивного фильтра, ЭДС и датчик пульсаций магнитного потока,30 выход детектора положительных сигналов перестраиваемая модель полного сопротив-через первый резистор присоединен к основ- ления обмотки якоря, масштабирующий уси-ному входу адаптивного фильтра, а выход литель, блок деления и узел сравнения, при-детектора отрицательных сигналов присое- чем выход датчика тока якоря присоединендинен к этому же входу через инвертор и также к входу масщтабируюидего усилителявторой резистор, выход адаптивного фильт- и к первому входу перестраиваемой модели35 ра присоединен к одному из входов блока полного сопротивления обмотки якоря, ВТО-нелинейности, другой вход которого являет- рой вход которого присоединен к выходуся вторым входом датчика ЭДС, выход бло- блока нелинейности, выход перестраиваемойка нелинейности присоединен к первому модели полного сопротивления обмотки яко-входу блока формирования знака ЭДС, вторя присоединен к одному из входов сумма- Q рой вход которого является третьим входом тора, другой вход которого присоединен кдатчика ЭДС, выход блока формирования выходу датчика ЭДС, выход сумматора сое-знака ЭДС является выходом датчика ЭДС. динен с одним из входов узла сравнения,6. Устройство по п. 3, отличающееся те.м, другой вход которого соединен с выходомчто датчик пульсаций магнитного потока сос- датчика напряжения якоря, а выход соеди-тоит из многовитковой катущки с ферромаг- нен с входом делимого блока деления, вход45 нитным сердечником, в качестве которого делителя которого присоединен к выходуиспользован материал самого полюса, щи- масщтабирующего усилителя, выход блокарина сердечника которого не больще щири- деления присоединен к третьему входу ре-ны зуба якоря, а его геометрическая ось гулятора тока, первый вход датчика ЭДСрасположена на геометрической оси глав- присоединен к выходу датчика пульсацийного полюса, при этом катушка размещена магнитного потока, второй вход этого дат-в пазу, образованном в обращенной к рас- чика присоединен к выходу датчика токаточке якоря поверхности главного полюса.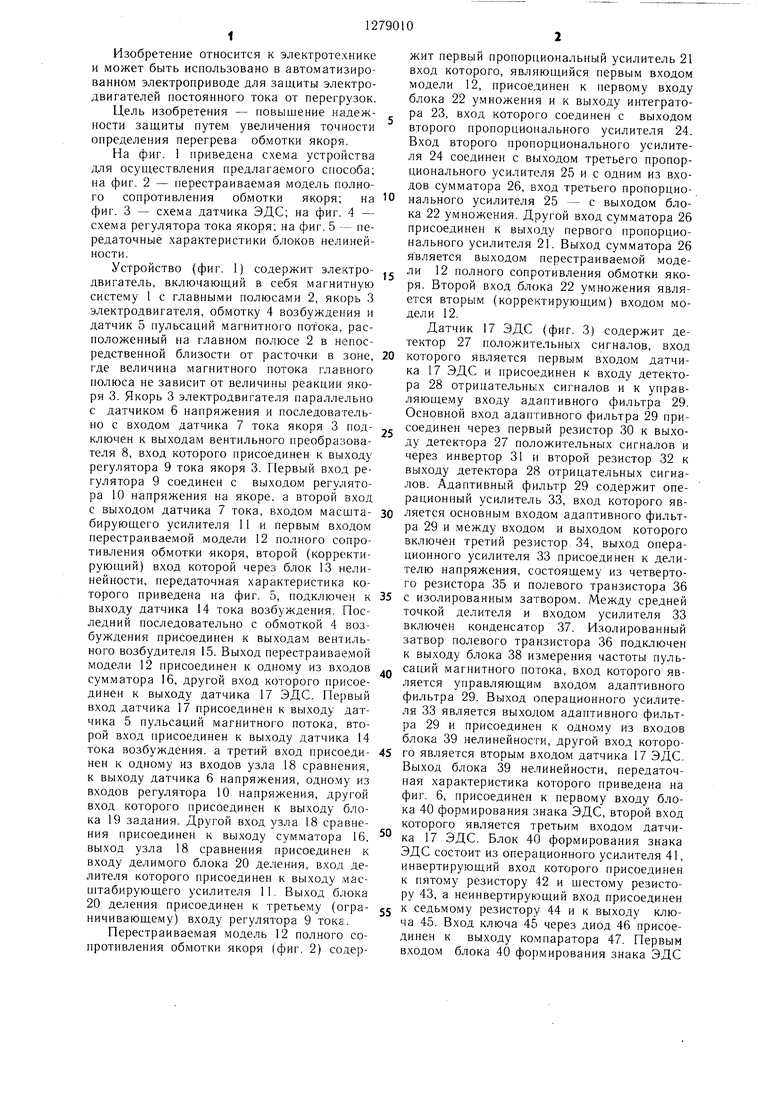

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления коммутацией электродвигателя постоянного тока и устройство для его осуществления | 1984 |
|
SU1327259A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Электропривод постоянного тока | 1985 |
|
SU1339851A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264287A1 |
| Способ защиты обмотки якоря электродвигателя постоянного тока от перегрева | 1986 |
|
SU1573499A1 |
| Электропривод постоянного тока | 1986 |
|
SU1436255A1 |
| Датчик статической и динамической составляющих тока электродвигателя постоянного тока | 1981 |
|
SU945813A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |


Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе для защиты электродвигателей постоянного тока от перегрузок. Целью изобретения является повышение надежности защиты путем увеличения точности определения перегрева обмотки якоря электродвигателя. Сигнал от датчика 5 пульсаций магнитного потока, амплитуда которых определяет ЭДС, наводи0т 5 мую в обмотке датчика, детектируется при помощи детектора 27 положительных сигналов и детектора 28 отрицательных сигналов. Аналоговый сигнал, пропорциональный частоте пульсаций, вырабатывается на выходе блока 38 измерения частоты пульсаций магнитного потока. Учет рассеяния потока осуществляется с помощью блока 39 нелинейности, на выходе которого сигнал пропорционален модулю ЭДС в обмотке якоря, который поступает на первый вход блока 40 формирования знака ЭДС. Если напряжение имеет положительную полярность, то усилитель 41 работает как сумматор, в результате на выходе блока 40 получается сигнал, пропорциональный по величине ЭДС, и имеющий знак напряжения. Если же этот сигнал имеет отрицательную полярность, то усилитель 41 работает как обычный инвертор и на выходе усилителя 41 сигнал пропорциона,пен ЭДС и имеет полярность напряжения. Таким образом, точное определение перегрева обмотки якоря позволило значительно повысить надежность защиты. 2 с. п. ф-лы и 4 3. п. ф-лы, 6 ил. (Л ю 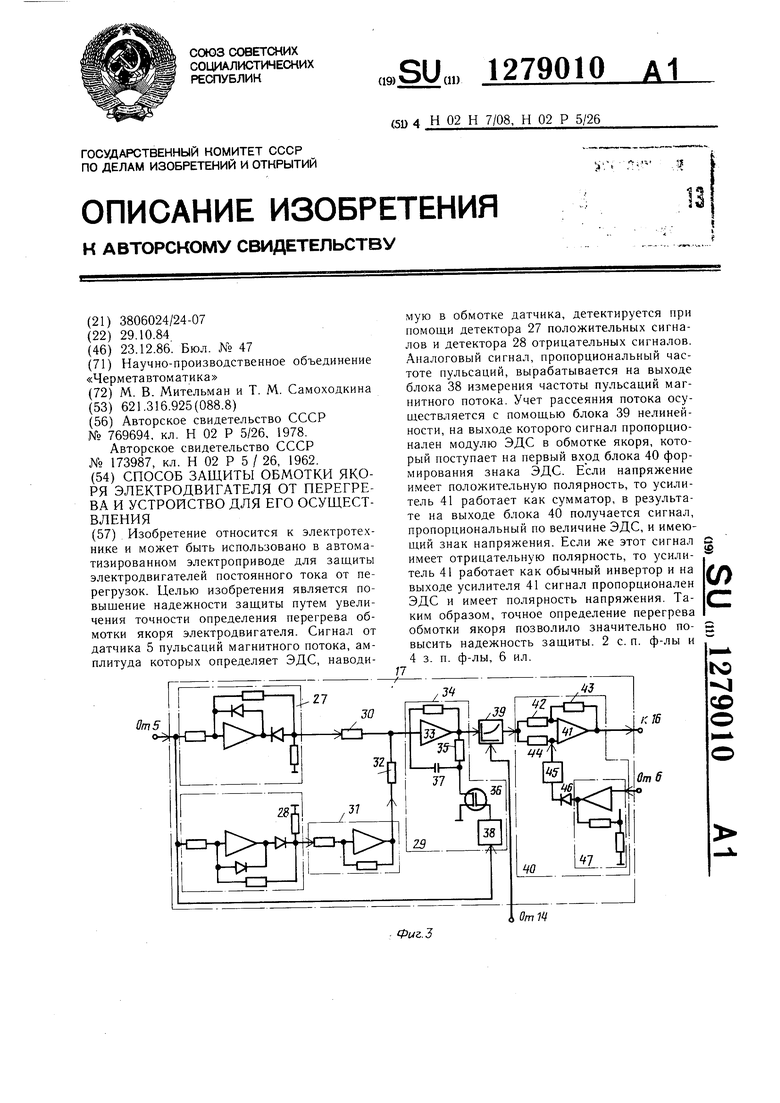
Фмг.7
u.Z
Г
Om10 9t
2D
51
П -I1
on г
Фиг. Ч ьОт
Kneplто
,finep39
Фиг. 5
1,0
0,Щ5
дмиН
Редактор С. Лыжова Заказ 6849/55
Составитель О. Л 1уратов
Техред И. ВересКорректор В. Бутяга
Тираж 612Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
ёноп
Ч
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU173987A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
