з i
Изобретение относится к электротехнике, а именно к регулируемым машинам переменного тока различного назначения при работе их от преобразователя частоты, и может быть использовано в автономной системе электрооборудования (АСЭ) транспортных средств с вентильными электродвигателями.
Цель изобретения - уменьшение пульсаций вращающего момента,, улучшение энергетических, динамических и массогабаритных показателей и расширение диапазона регулирования частоты вращения вентильного электродвигателя (вд).
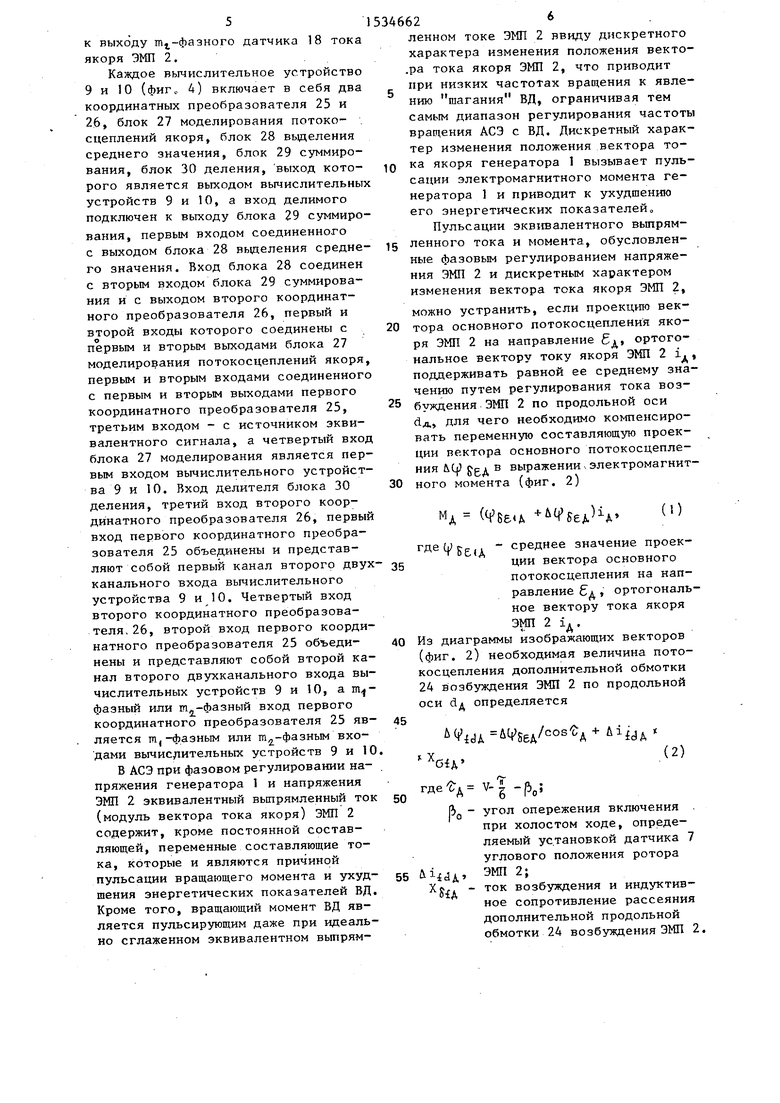
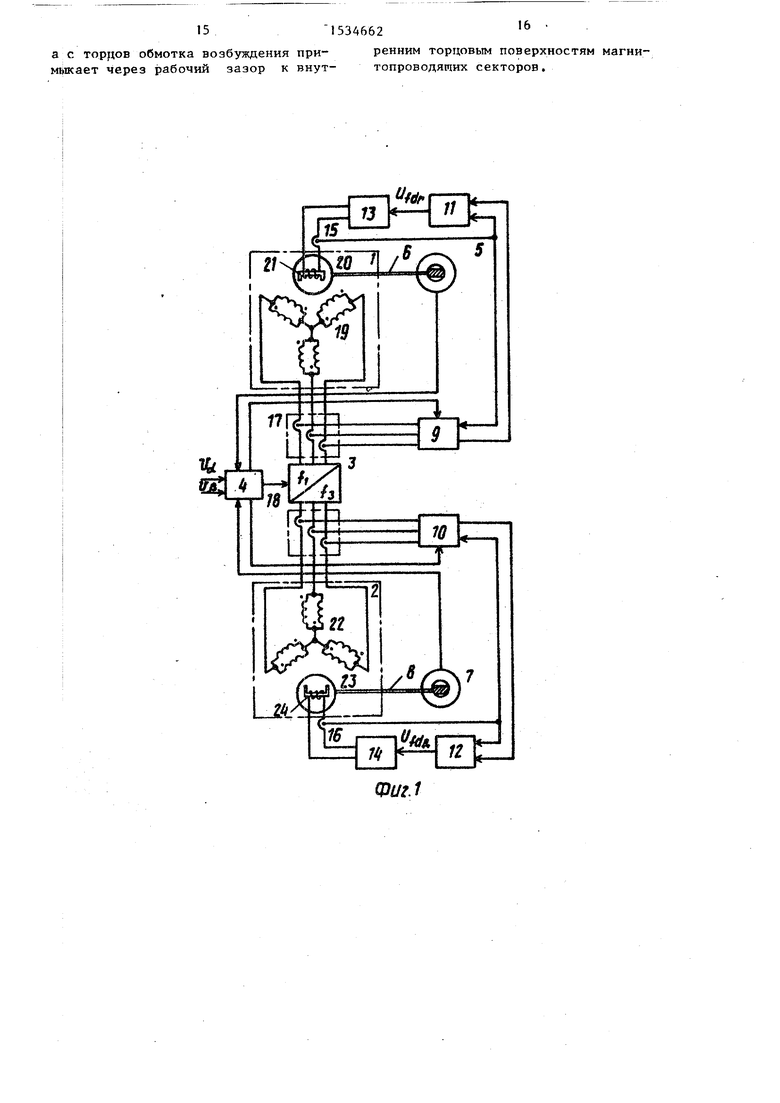
На фиг. 1 приведена принципиальная электрическая схема АСЭ с ВД; на фиг. 2 и 3 - векторные диаграммы изображающих векторов генератора и электромеханического преоьразовате- ля (ЭМП); на фиг, 4 - функциональная схема вычислительного устройства; на фиг. 5 - функциональная схема блока моделирования потокосцеп- лений якоря; на фиг. 6 - конструктивная схема ЭМН и генератора с датчиками углового положения ротора; на фиг. 7 - конструктивная схема диска ротора ЭМП и генератора.
АСЭ (фиг. ) содержит 2р,-полюсный т -фазный генератор 1 переменного тока и вентильный электродвигатель, включающий в себя 2р -полюсный тп4-фазный ЭМП 2, обмотки якорей которых связаны через преобразователь 3 частоты, управляющий вход которого подключен к выходу системы 4 управления (СУ), датчик 5 углового положения ротора генератора 1, установленный на оси 6, датчик 7 углового положения ротора ЭМП 2, установленный на оси 8, первое 9 и второе 10 вычислительное устройства, два пропорционально-интегральных регулятора И и 12 тока, два усилителя 13 и 14 тока, два дополнительных датчика 15 и 16 тока, т.-фазный датчик 17 тока якоря генератора 1, m -фаэный датчик 18 тока якоря ЭМП 2
СУ 4 снабжена двумя дополнительными выходами, входами для регулирования угла запаздывания и угла опережения и информационными входами, подключенными соответственно к выходам датчиков 5 и 7 углового положения роторов генератора 1 и ЭМП 2, выходные сигналы которых пропорцио346624
нальны тригонометрическим функциям положения их роторов. Каждая фаза кольцевой обмотки 19 якоря генера5 тора 1 выполнена из двух ветвей, расположенных одна относительно другой на угол 1Г/р, и соединенных между собой дополнительной обмоткой 21 возбуждения, ось которой совпадает с
10 осью полюсов индуктора 20 генератора 1, Дополнительная обмотка 21 возбуждения подключена к выходу первого усилителя 13 тока через первый дополнительный датчик 15 тока„ Вход
15 первого усилителя 13 подключен к выходу первого пропорционально-интегрального регулятора 11, первый вход которого подключен к выходу первого вычислительного устройства 9,
20 а второй вход объединен с первым входом первого вычислительного устройства 9 и подключен к выходу первого дополнительного датчика 15 тока. Второй двухканальный вход пер2 вого вычислительного устройства 9 подключен к первому дополнительному выходу системы 4 управления, а пц- фазный вход этого вычислительного устройства 9 подключен к выходу фазного датчика 17 тока якоря генератора 1.
Каждая фаза кольцевой обмотки 22 якоря ЭМП 2 выполнена из двух ветвей, расположенных одна относительно
35 ДРУГОЙ на угол 1 /р2 и соединенных между собой своими разноименными выводами,, Индуктор 23 ЭМП 2 снабжен дополнительной обмоткой 24 возбуждения, ось которой совпадает с осью
40 полюсов индуктора 23 ЭМП 2. Дополнительная обмотка 24 возбуждения ЭМП 2 подключена к выходу второго усилителя 14 тока через второй дополнительный датчик 16 тока. Вход
45 второго усилителя 14 подключен к выходу второго пропорционально-интегрального регулятора 12 тока, первый вход которого подключен к выходу второго вычислительного устройст50 ва 10, а второй вход объединен с первым входом второго вычислительного устройства 10 и подключен к выходу второго дополнительного датчика 16 тока„ Второй двухканальный
55 вход второго вычислительного устройства 10 подключен к второму дополнительному выходу системы 4 управления, а т -фазный вход этого вычислительного устройства 10 подключен
5
к выходу irij-фазного датчика 18 тока якоря ЭМП 2.
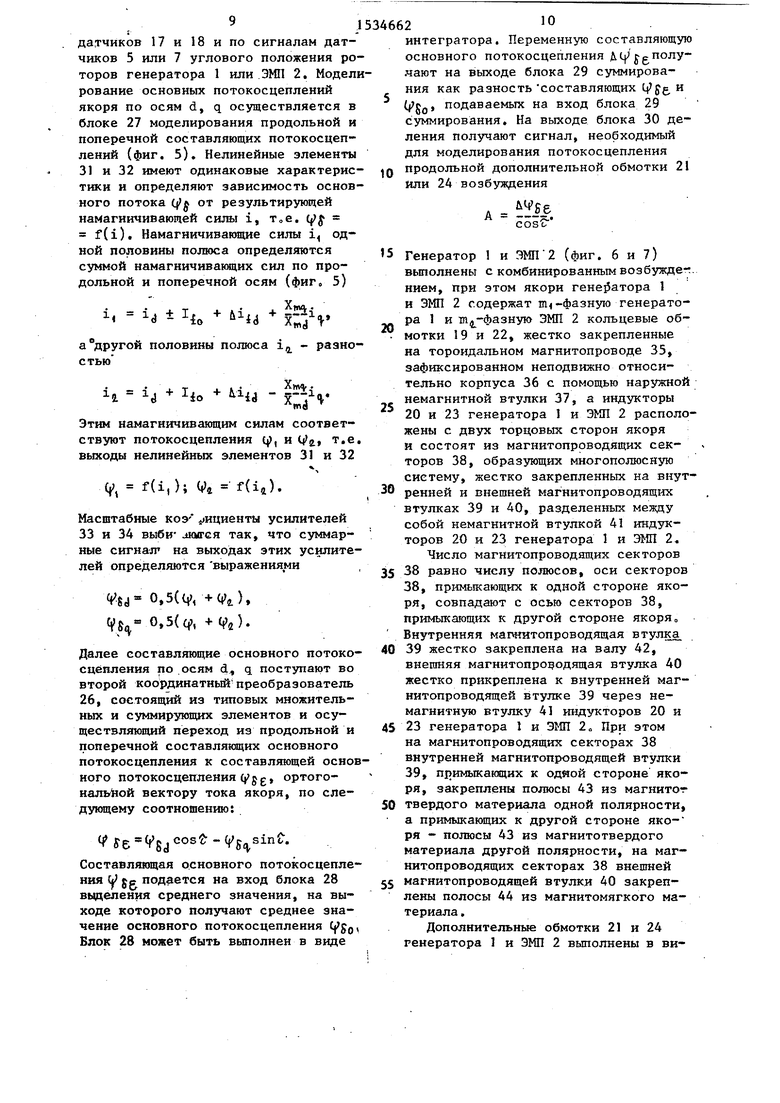
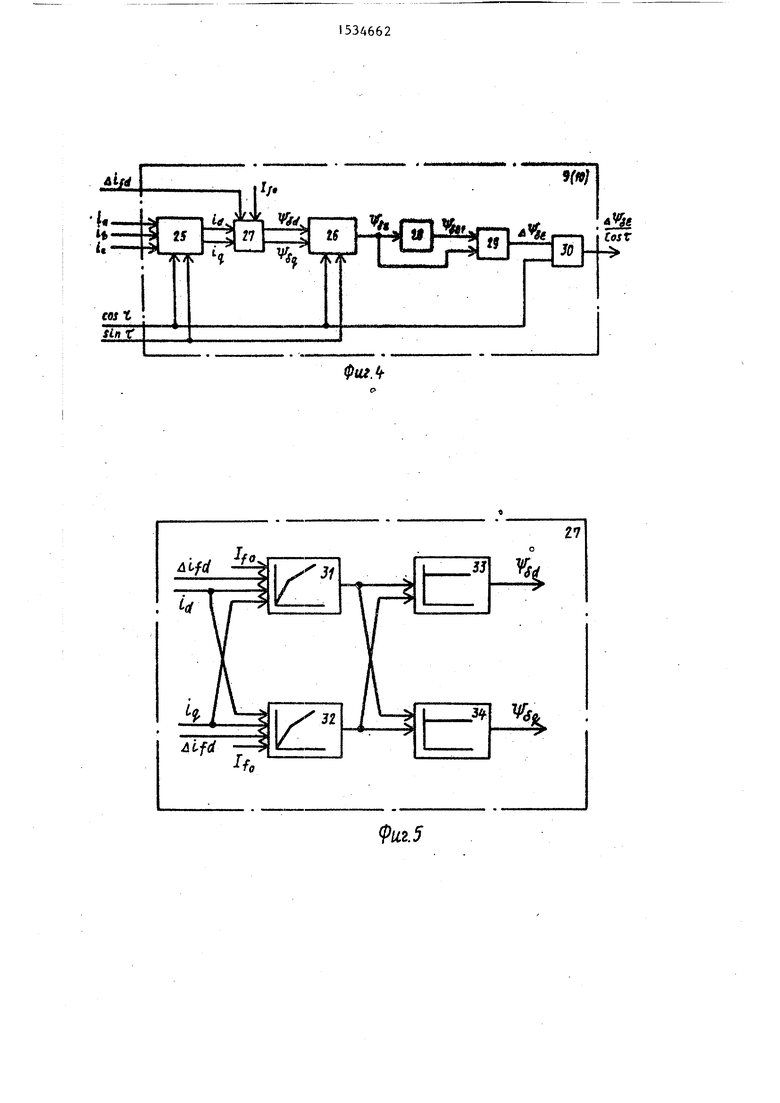
Каждое вычислительное устройство 9 и 10 (фиг,, 4) включает в себя два координатных преобразователя 25 и 26, блок 27 моделирования потоко- сцеплений якоря, блок 28 выделения среднего значения, блок 29 суммирования, блок 30 деления, выход которого является выходом вычислительных устройств 9 и 10, а вход делимого подключен к выходу блока 29 суммирования, первым входом соединенного с выходом блока 28 выделения среднего значения. Вход блока 28 соединен с вторым входом блока 29 суммирования и с выходом второго координатного преобразователя 26, первый и второй входы которого соединены с первым и вторым выходами блока 27 моделирования потокосцеплений якоря, первым и вторым входами соединенного с первым и вторым выходами первого координатного преобразователя 25, третьим входом - с источником эквивалентного сигнала, а четвертый вход блока 27 моделирования является первым входом вычислительного устройства 9 и 10. Вход делителя блока 30 деления, третий вход второго координатного преобразователя 26, первый вход первого координатного преобразователя 25 объединены и представляют собой первый канал второго двух канального входа вычислительного устройства 9 и 10. Четвертый вход второго координатного преобразователя, 26, второй вход первого координатного преобразователя 25 объединены и представляют собой второй канал второго двухканального входа вычислительных устройств 9 и 10, а пц- фазный или т,-фазный вход первого координатного преобразователя 25 является га(-фазным или m -фазным входами вычислительных устройств 9 и 10
В АСЭ при фазовом регулировании напряжения генератора 1 и напряжения ЭМП 2 эквивалентный выпрямленный ток (модуль вектора тока якоря) ЭМП 2 содержит, кроме постоянной составляющей, переменные составляющие тока, которые и являются причиной пульсации вращающего момента и ухудшения энергетических показателей ВД. Кроме того, вращающий момент ВД является пульсирующим даже при идеально сглаженном эквивалентном выпрям34662
ленном токе ЭМП 2 ввиду дискретного характера изменения положения векто- .ра тока якоря ЭМП 2, что приводит при низких частотах вращения к явлению шагания ВД, ограничивая тем самым диапазон регулирования частоты вращения АСЭ с ВД. Дискретный характер изменения положения вектора ка якоря генератора 1 вызывает пульсации электромагнитного момента генератора 1 и приводит к ухудшению его энергетических показателей
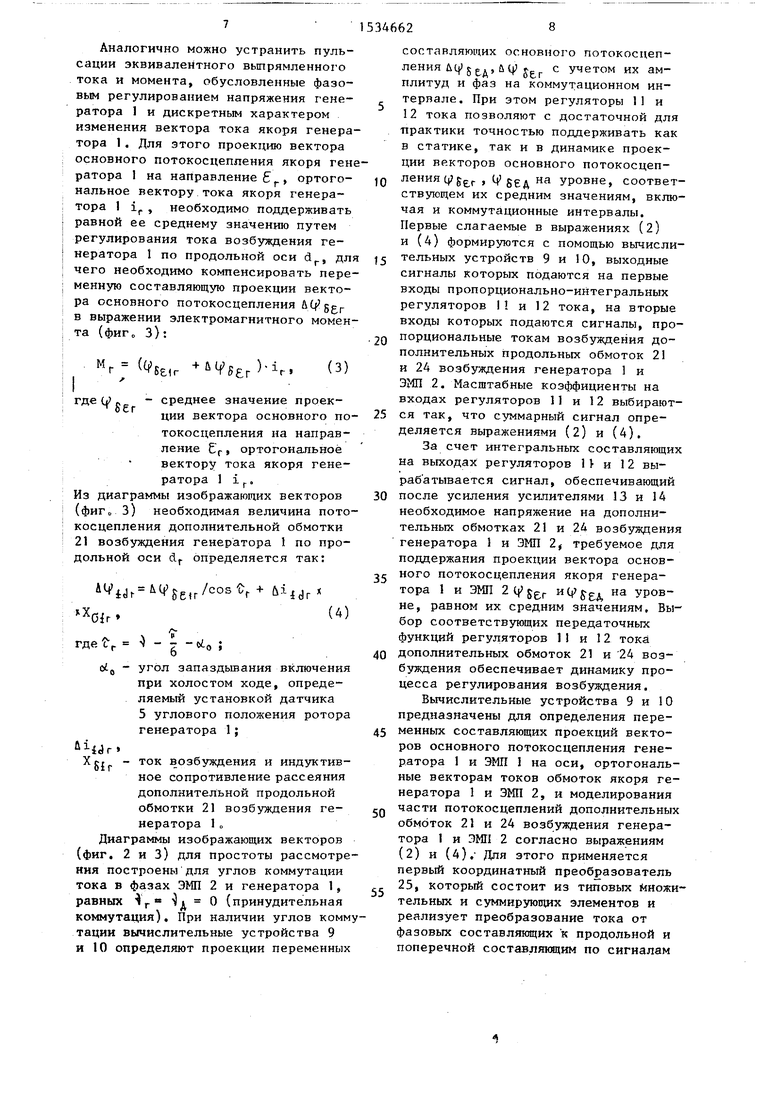
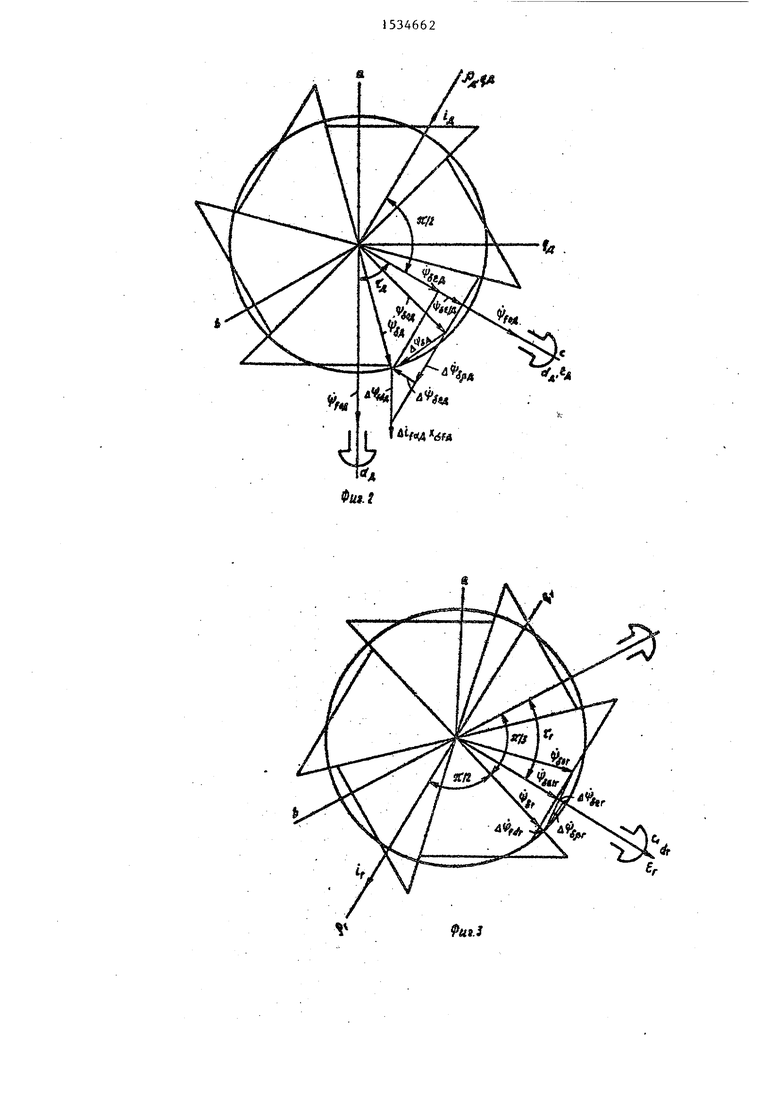
Пульсации эквивалентного выпрям 5 ленного тока и момента, обусловленные фазовым регулированием напряжения ЗИП 2 и дискретным характером изменения вектора тока якоря ЭМП 2, можно устранить, если проекцию век20 тора основного потокосцепления якоря ЭМП 2 на направление БД, ортогональное вектору току якоря ЭМП 2 1д, поддерживать равной ее среднему значению путем регулирования тока воз25 буждения ЭМП 2 по продольной оси ЙА Для чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления ЬС|) Јсд в выражении электромагнит30 ного момента (фиг. 2)
МА (Бе +
AVtej 1
А
(О
где(Јс- . - среднее значение проек- ции вектора основного
потокосцепления на направление Јд, ортогональное вектору тока якоря ЭМП 2 1д.
Из диаграммы изображающих векторов (фиг. 2) необходимая величина потокосцепления дополнительной обмотки 24 возбуждения ЭМП 2 по продольной оси с1д определяется
u(U it WcoseA+ ИЫА
X
(2)
.
60 - угол опережения включения при холостом ходе, определяемый установкой датчика 7 углового положения ротора
, ЭМП 2;
Хс.,. - ток возбуждения и индуктивное сопротивление рассеяния дополнительной продольной обмотки 24 возбуждения ЭМП 2.
Аналогично можно устранить пульсации эквивалентного выпрямленного тока и момента, обусловленные фазовым регулированием напряжения генератора 1 и дискретным характером изменения вектора тока якоря генератора 1. Для этого проекцию вектора основного потокосцепления якоря генератора 1 на направление Јг , ортогональное вектору тока якоря генератора 1 if, необходимо поддерживать равной ее среднему значению путем регулирования тока возбуждения ге- нератора 1 по продольной оси dr, для чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления u Q 5ЈГ в выражении электромагнитного момента (фиг„ 3):
МГ tyBE,r )1П
(3)
где о; t - среднее значение проекции вектора основного потокосцепления на направление Ег, ортогональное вектору тока якоря генератора 1 ir.
Из диаграммы изображающих векторов (фиг„ 3) необходимая величина потокосцепления дополнительной обмотки 21 возбуждения генератора 1 по продольной оси dr определяется так:
WiJtebV$e,r/cosЈ,. +
Х
(4)
Ofr
4
гдеГг v - - -oi0 ;
oie - угол запаздывания включения при холостом ходе, определяемый установкой датчика
5углового положения ротора генератора 1;
uifJr
Хсг - ток возбуждения и индуктивное сопротивление рассеяния дополнительной продольной обмотки 21 возбуждения генератора 1 о
Диаграммы изображающих векторов (фиг. 2 и 3) для простоты рассмотрения построены для углов коммутации тока в фазах ЭМП 2 и генератора 1, равных Ъга Зд 0 (принудительная коммутация). При наличии углов коммтации вычислительные устройства 9 и 10 определяют проекции переменных
составляющих основного потокосцепления u if 5 Ј u 4 jp с учетом их амплитуд и фаз на коммутационном интервале. При этом регуляторы 11 и 12 тока позволяют с достаточной для практики точностью поддерживать как в статике, так и в динамике проекции векторов основного потокосцепленияф5Јг , Ц1 бед на уровне, соответствующем их средним значениям, включая и коммутационные интервалы. Первые слагаемые в выражениях (2) и (4) формируются с помощью вычисли 5 тельных устройств 9 и 10, выходные сигналы которых подаются на первые входы пропорционально-интегральных регуляторов 1 и 12 тока, на вторые входы которых подаются сигналы, проQ порциональные токам возбуждения дополнительных продольных обмоток 21 и 24 возбуждения генератора 1 и ЭМП 2. Масштабные коэффициенты на входах регуляторов 11 и 12 выбирают5 ся так, что суммарный сигнал определяется выражениями (2) и (4).
За счет интегральных составляющих на выходах регуляторов И и 12 вырабатывается сигнал, обеспечивающий
0 после усиления усилителями 13 и 14 необходимое напряжение на дополнительных обмотках 21 и 24 возбуждения генератора 1 и ЭМП 2f требуемое для поддержания проекции вектора основ- с ного потокосцепления якоря генератора 1 и ЭМП 2 ($ 5Бг и С(7Јр. на уровне, равном их средним значениям. Выбор соответствующих передаточных функций регуляторов 11 и 12 тока
0 дополнительных обмоток 21 и 24 возбуждения обеспечивает динамику процесса регулирования возбуждения.
Вычислительные устройства 9 и 10 предназначены для определения пере- 5 менных составляющих проекций векторов основного потокосцепления генератора 1 и ЭМП 1 на оси, ортогональные векторам токов обмоток якоря генератора 1 и ЭМП 2, и моделирования Q части потокосцеплений дополнительных обмоток 21 и 24 возбуждения генератора 1 и ПМГ1 2 согласно выражениям (2) и (4),- Для этого применяется первый координатный преобразователь 25, который состоит из типовых множи5
тельных и суммирующих элементов и реализует преобразование тока от фазовых составляющих к продольной и поперечной составляющим по сигналам
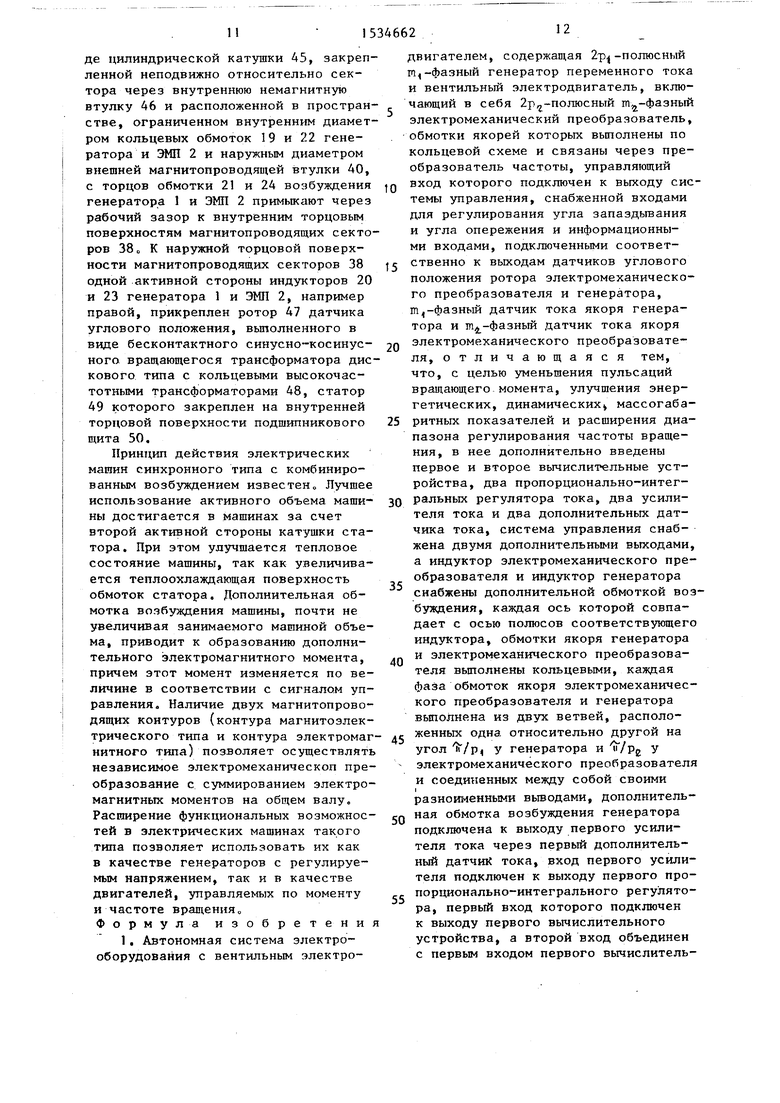
датчиков 17 и 18 и по сигналам датчиков 5 или 7 углового положения роторов генератора 1 или ЭМП 2. Моделирование основных потокосцеплений якоря по осям d, q осуществляется в блоке 27 моделирования продольной и поперечной составляющих потокосцеплений (фиг. 5). Нелинейные элементы 31 и 32 имеют одинаковые характеристики и определяют зависимость основного потока (ft от результирующей намагничивающей силы i, т„е. if§ f(i). Намагничивающие силы 11 одной половины полюса определяются суммой намагничивающих сил по продольной и поперечной осям (фиг 5)
ч
1Ь + i
а другой половины полюса стью
Н j + lie + &U - Н«
Этим намагничивающим силам соответствуют потокосцепления ц), и , т.е. выходы нелинейных элементов 31 и 32
%. л
fy f(i,h V4 f(ift).
Масштабные коэ ициенты усилителей 33 и 34 выби акмгея так, что суммарные сигнал на выходах этих усилителей определяются выражениями
VW
V
0,5(ty, +Vt), 0,5(q, ).
Далее составляющие основного потокосцепления по осям d, q поступают во второй координатный преобразователь 26, состоящий из типовых множительных и суммирующих элементов и осуществляющий переход из продольной и поперечной составляющих основного потокосцепления к составляющей основного потокосцепления Q j g, ортогональной вектору тока якоря, по следующему соотношению:
,sinС.
V ,cosfc-V5V
Составляющая основного потокосцепления у jp подается на вход блока 28 выделения среднего значения, на выходе которого получают среднее значение основного потокосцепления yg0, Блок 28 может быть выполнен в виде
интегратора. Переменную составляющую основного потокосцепления ДЦ полу- .чают на выходе блока 29 суммирования как разность составляющих и (, подаваемых на вход блока 29 суммирования. На выходе блока 30 деления получают сигнал, необходимый для моделирования потокосцепления продольной дополнительной обмотки 21 или 24 возбуждения
А - yS& созГ
0
5
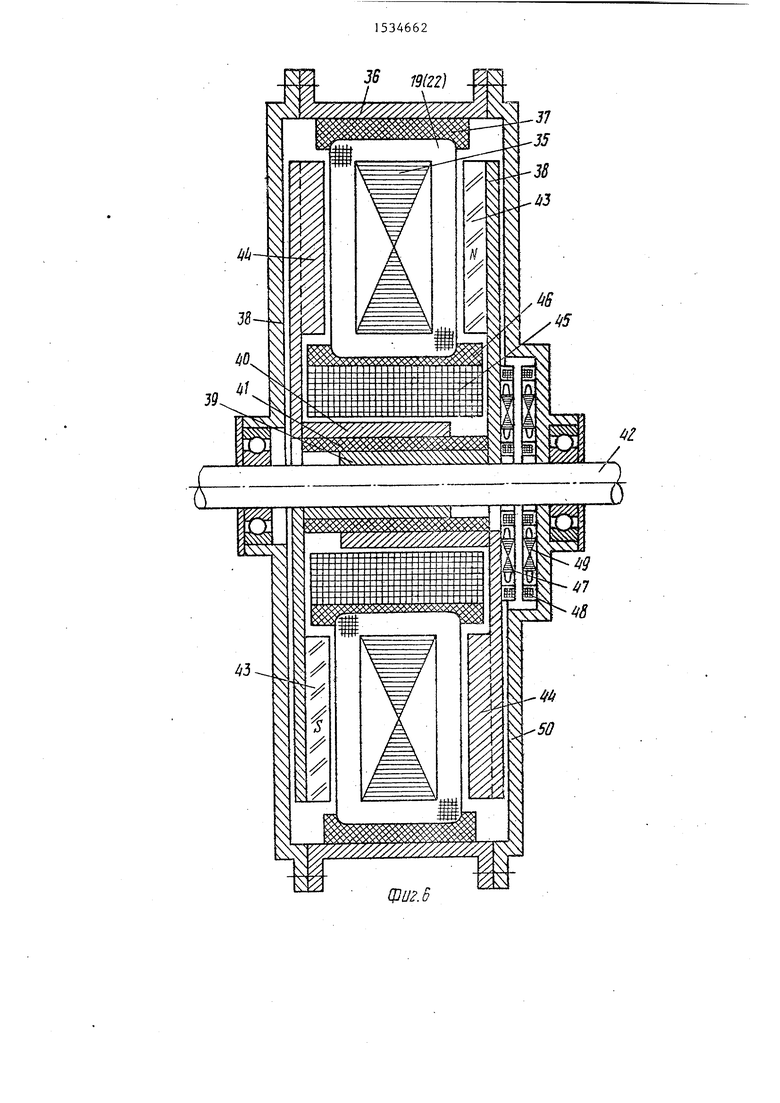
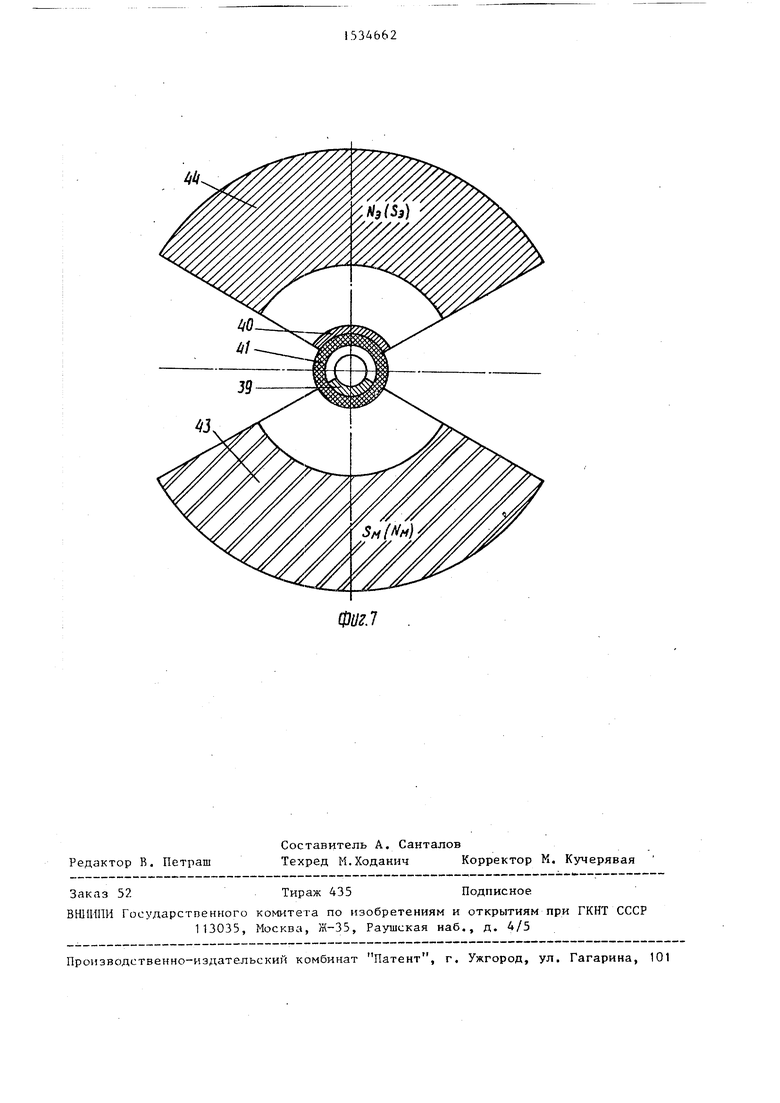
5 Генератор 1 и ЭМП 2 (фиг. 6 и 7)
выполнены с комбинированным возбуждением, при этом якори генератора 1 и ЭМП 2 содержат т -фазную генератора 1 и т -фазную ЭМП 2 кольцевые об- мотки 19 и 22, жестко закрепленные на тороидальном магнитопроводе 35, зафиксированном неподвижно относительно корпуса 36 с помощью наружной немагнитной втулки 37, а индукторы 20 и 23 генератора 1 и ЭМП 2 расположены с двух торцовых сторон якоря и состоят из магнктопроводящих секторов 38, образующих многополюсную систему, жестко закрепленных на внутренней и внешней магнитопроводящих втулках 39 и 40, разделенных между собой немагнитной втулкой 41 индукторов 20 и 23 генератора 1 и ЭМП 2. Число магнитопроводящих секторов
38равно числу полюсов, оси секторов
38,примыкающих к одной стороне якоря, совпадают с осью секторов 38, примыкающих к другой стороне якоря. Внутренняя мапнитопроводящая втулка
39жестко закреплена на валу 42, внешняя магнитопроводящая втулка 40 жестко прикреплена к внутренней маг- нитопроводящей втулке 39 через немагнитную втулку 41 индукторов 20 и 23 генератора 1 и ЭМП 20 При этом
на магнитопроводящих секторах 38 внутренней магнитопроводящей втулки
39,примыкающих к одяой стороне якоря, закреплены полюсы 43 из магнито0 твердого материала одной полярности, а примыкающих к другой стороне яко- ря - полюсы 43 из магнитотвердого материала другой полярности, на магнитопроводящих секторах 38 внешней
5 магнитопроводящей втулки 40 закреплены полосы 44 из магнитомягкого материала .
Дополнительные обмотки 21 и 24 генератора 1 и ЭМП 2 выполнены в ви0
5
0
5
де цилиндрической катушки 45, закрепленной неподвижно относительно сектора через внутреннюю немагнитную втулку 46 и расположенной в пространстве, ограниченном внутренним диаметром кольцевых обмоток 19 и 22 генератора и ЭМП 2 и наружным диаметром внешней магнитопроводящей втулки 40, с торцов обмотки 21 и 24 возбуждения генератора 1 и ЭМП 2 примыкают через рабочий зазор к внутренним торцовым поверхностям магнитопроводящих секторов 38 о К наружной торцовой поверхности магнитопроводящих секторов 38 одной активной стороны индукторов 20 и 23 генератора 1 и ЭМП 2, например правой, прикреплен ротор 47 датчика углового положения, выполненного в виде бесконтактного синусно-косинус- ного вращающегося трансформатора дискового типа с кольцевыми высокочастотными трансформаторами 48, статор 49 которого закреплен на внутренней торцовой поверхности подшипникового щита 50.
Принцип действия электрических машин синхронного типа с комбинированным возбуждением известен Лучшее использование активного объема машины достигается в машинах за счет второй активной стороны катушки статора. При этом улучшается тепловое состояние машины, так как увеличивается теплоохлаждающая поверхность обмоток статора. Дополнительная обмотка возбуждения машины, почти не увеличивая занимаемого машиной объема, приводит к образованию дополнительного электромагнитного момента, причем этот момент изменяется по величине в соответствии с сигналом управления. Наличие двух магнитопроводящих контуров (контура магнитоэлектрического типа и контура электромагнитного типа) позволяет осуществлять независимое электромеханическоп преобразование с суммированием электромагнитных моментов на общем валу. Расширение функциональных возможностей в электрических машинах такого типа позволяет использовать их как в качестве генераторов с регулируемым напряжением, так и в качестве двигателей, управляемых по моменту и частоте вращения,, Формула изобретения
1. Автономная система электрооборудования с вентильным электро
5
0
двигателем, содержащая 2р -полюсный т,-фазный генератор переменного тока и вентильный электродвигатель, включающий в себя 2р -полюсный т -фазный электромеханический преобразователь, обмотки якорей которых выполнены по кольцевой схеме и связаны через преобразователь частоты, управляющий вход которого подключен к выходу системы управления, снабженной входами для регулирования угла запаздывания и угла опережения и информационными входами, подключенными соответственно к выходам датчиков углового положения ротора электромеханического преобразователя и генератора, т,-фазный датчик тока якоря генератора и т4-фазный датчик тока якоря электромеханического преобразователя,
отличающаяся
тем,
0
5
0
5
0
5
что, с целью уменьшения пульсаций вращающего момента, улучшения энергетических, динамических массогаба- ритных показателей и расширения диапазона регулирования частоты вращения, в нее дополнительно введены первое и второе вычислительные устройства, два пропорционально-интегральных регулятора тока, два усилителя тока и два дополнительных датчика тока, система управления снабжена двумя дополнительными выходами, а индуктор электромеханического преобразователя и индуктор генератора снабжены дополнительной обмоткой возбуждения, каждая ось которой совпадает с осью полюсов соответствующего индуктора, обмотки якоря генератора и электромеханического преобразователя выполнены кольцевыми, каждая фаза обмоток якоря электромеханического преобразователя и генератора выполнена из двух ветвей, расположенных одна относительно другой на угол Ъ/PI у генератора и У электромеханического преобразователя и соединенных между собой своими разноименными выводами, дополнительная обмотка возбуждения генератора подключена к выходу первого усилителя тока через первый дополнительный датчик тока, вход первого усилителя подключен к выходу первого пропорционально-интегрального регулятора, первый вход которого подключен к выходу первого вычислительного устройства, а второй вход объединен с первым входом первого вычислитель13
ного устройства и подключен к выходу первого дополнительного датчика тока, второй двухканальный вход первого вычислительного устройства подключен к первому дополнительному выходу системы управления, а т -фазный вход этого вычислительного устройства подключен к выходу т4-фазного датчика тока якоря генератора, дополнительная обмотка возбуждения электромеханического преобразователя подключена к выходу второго усилителя тока через второй дополнительный датчик тока, вход второго усилителя подключен к выходу второго пропорционально-интегрального регулятора, первый вход которого подключен к выходу второго вычислительного устройства, а второй вход объединен с первым входом второго вычислительног устройства и подключен к выходу второго дополнительного датчика тока, второй двухканальный вход второго вычислительного устройства подключен к второму дополнительному выходу системы управления, а та-фазный вход этого вычислительного устройства подключен к выходу та-фазного датчика тока якоря электромеханического преобразователя, причем каждое вычислительное устройство включает в себя два координатных преобразователя, блок моделирования потокосцеплений якоря, блок выдел ения среднего значения, блок суммирования, блок деления, выход которого является выходом вычислительного устройства, а вход делимого подключен к выходу блока суммирования, первым входом соединенного с выходом блока выделения среднего значения, вход которо- ,го соединен с вторым входом блока суммирования и выходом второго координатного преобразователя, первый н второй входы которого соединены с первым и вторым выходами блока моделирования потокосцеплений якоря, первым и вторым входами соединенного с первым и вторым выходами первого координатного преобразователя, третьим входом - с источником эквивалентного сигнала, а четвертый вход блока моделирования является первым входом вычислительного устройства, вход делителя блока деления, третий вход второго координатного преобразователя и первый вход первого координатного преобразователя объедине3466214
ны и представляют собой первый канал второго двухканального входа вычислительного устройства, четвертый вход второго координатного преобразователя, второй вход первого координатного преобразователя объединены и представляют собой второй канал второго двухканального входа вычислительного устройства, а та-фазный вход первого координатного преобразователя является тг-фазным входом вычислительного устройства
10
5
0
5
0
5
0
5
0
5
2. Система по п. 1, отличающаяся тем, что генератор и электромеханический преобразователь выполнены с комбинированным возбуждением, при этом кольцевые обмотки якоря генератора и электромеханического преобразователя, жестко закреплены на тороидальном магнитопроводе, зафиксированном неподвижно относительно корпуса с помощью наружной немагнитной втулки, а индуктор расположен с двух торцовых сторон якоря и состоит из магнитопроводящих секторов, образующих многополюсную систему, жестко закрепленных на внутренней и внешней магнитопроводящих втулках, разделенных между собой немагнитной втулкой индуктора, число магнитопроводятих секторов равно числу полюсов, оси секторов, примыкающих к одной стороне якоря, совпадают с осью секторов, примыкающих к другой стороне якоря, внутренняя магнитопроводящая втулка жестко закреплена на валу, внешняя магнитопроводящая втулка жестко прикреплена к внутренней магнитопроводящей втулке через немагнитную втулку индуктора, на магнитопроводящих секторах внутренней магнитопроводящей втулки, примыкающих к одной стороне якоря, закреплены полюсы из магнитотвердого материала одной полярности, а примыкающих к другой стороне якоря -1 полюсы из магнитотвердого материала другой полярности, на магнитопроводящих секторах внешней магнитопрово- дящей втулки закреплены полюсы из магнитных материалов, дополнительная обмотка возбуждения выполнена в виде цилиндрической катушки и расположена в пространстве, ограниченном внутренним диаметром кольцевой обмотки статора и наружным диаметром внешней магнитопроводящей втулки индуктора,
а с торцов обмотка возбуждения при- ренним торцовым поверхностям магни- М1якает через рабочий зазор к внут- топроводящих секторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| Способ компенсации пульсаций вращающего момента вентильного электродвигателя | 1986 |
|
SU1480045A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2003 |
|
RU2249123C1 |
Изобретение относится к электротехнике, конкретно к регулируемым электрическим машинам переменного тока при работе их от преобразователей частот, и может быть использовано в системах электропривода и электроснабжения транспортных средств. Цель изобретения - уменьшение пульсаций вращающегося момента вентильного электродвигателя, улучшение энергетических, динамических , массо-габаритных показателей и расширение диапазона регулирования частоты вращения. Индукторы генератора и электромеханического преобразователя вентильного электродвигателя снабжаются дополнительными продольными обмотками возбуждения, ток которых регулируется так, чтобы проекция регулируемой части вектора потокосцепления возбуждения по продольной оси на направление, ортогональное вектору тока якоря, была пропорциональна проекции асинхронной составляющей вектора основного потокосцепления на то же направление. Для этого используются вычислительные устройства, с помощью которых по сигналам датчиков тока якоря, возбуждения и углового положения ротора генератора и электромеханического преобразователя вычисляют необходимый закон изменения основного потокосцепления и регулируют токи возбуждения дополнительных продольных обмоток возбуждения, используя пропорционально-интегральные регуляторы и усилители токов возбуждения генератора и электромеханического преобразователя. 7 ил.
pf
3±J
Фиг.1
в
М
Јг
иа.З
s
5
ч 1.П
U i & & ro
г
-a
Я fei hs
Cx «04 j
М
| Вентильные двигатели и их применение на электроподвижном составе./ Под ред | |||
| Б.Н.Тихменева | |||
| - М.: Транспорт, 1976, 10-13 с | |||
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
