концентрации, измеряемой газоанализатором 2 в течение переходного процесса, преобразуются с помощью анало- ГО-1Ц1ФРОВОГО преобразователя 6 и запоминаются в запоминающем устройстве 8t Первый счетно-решающий блок (СРВ) 10 вычисляет конкретные пара- мртры объекта, используя эти мгновенные значения. Второй СРВ 13 по известным параметрам КС 3 вычисляет момент прекращения подачи СО с учетом постоянного запаздьшания, величина
1
Изобретение относится к сельскохозяйственным системам автоматического управления параметрами микроклимата культивационных сооружений (теплиц, парников, камер искусственного климата) и может быть использовано для автоматической подкормки растений углекислым газом.
На чертеже представлена схема автоматизированной системы газоподкормки.
Автоматизированная система газоподкормки содержит первый задатчик 1 (ЗД) времени начала газоподкормки, газоанализатор 2 (ГА), культивационное сооружение 3 (КС), исполнительный механизм 4 (ИМ), первое устройство 5 сравнения (УС),аналого-цифровой преобразователь 6 (АЦП), первую схему И 7 (И), запоминающее устройство 8 (ЗУ), второй задатчик 9 (ЗД) времени конца газопо ормки, первый счетно-решающий блок 10 (СРВ), третий задатчик 11 (ЗД) уровня концентрации, четвертый задатчик 12 (ЗД) конечной концентрации газа в культивационном сооружении 3 (КС), второй счетно-рещающий блок 13 ССРВ), таймер 14 (ТМ), второе устройство сравнения 15 (УС), третье устройство сравнения 16 (УС), четвертое устройство сравнения 17 (УС), пятое устройство управления 18 (УС), вторую дополнительную схему И 19, первую схему ИЛИ 20, вторую схему ИЛИ 21 и триггерную схему 22 (ТР). Цифрами вне блоков на чертеже показаны номекоторого установлена на третьем за- датчике 11 концентрации. С помощью второго СРВ 13 определяются также необходимый уровень подачи углекислоты в КС для установления ее концентрации на желаемом значении и момент начала этой подачи с учетом за- паздьгоания. С помощью таймера и устройств сравнения осуществляется переключение исполнительного механизма 4 подачи COj в КС по времени. I 3.п. ф-лы, 1 ил.
ра входов и выходов блоков, двойными линиями - те связи между блоками, по которым сигнал передается в виде цифрового кода (например, 16-разрядный набор О и 1, который передается по 16-ти проводам), в отличие от связей, показанных одной линией, сигнал по которым передается одним про0 водом.
Выход таймера 14 подключен jc первым входам УС 5, УС 15 и к вторым входам УС 17 и УС 18. Вторые входы УС1 5, УС2 15 и первые входы УС 17,
5 УС 18 присоединены соответственно к выходам ЗД 1, ЗД 9, второму и третьему выходам СРВ 13. Первый и второй входы дополнительной схемы И 19 подключены соответственно к вы0 ходу УС 18 и к первому выходу СРВ 13, а ее выход присоединен к первому входу первой схемы ИДИ 20, второй вход которой соединен с выходом УС 5 и с вторым входом АЦП 6. Первый и второй
5 входы второй схемы ИЛИ 21 подключены соответственно к выходам второго 15 и четвертого 17 УС, а ее вьпсод присоединен к R-входу ТР 22, S-вход которого подключен к выходу первой схе0 мы ИЛИ 20. Вход исполнительного механизма 4 присоединен к выходу ТР 22 а выход соединен с вхрдом КС 3, выход которого.соединен с входом ГА 2. Выход ГА 2 подключен к первому входу
5 АЦП 6 и к первому входу УС 16, второй вход которого присоединен к выходу третьего ЗД 11, а выход подключен к первому входу первой схемы И 7.
Второй выход ЛШ1 6 присоединен к второму входу первой схемы И 7 и к второму входу ЗУ 8, первый вход которого подключен к первому выходу АИП 6, а выход присоединен к первому входу первого СРВ 10, Второй вход первого СРВ 10 подключен к выходу первой схемы И 7, а первый выход присоединен к
первому входу второго СРЕ 13 и к тре- ю сигнал (в виде единиц на выходах всех .тьим входам ЗУ 8 и АЦП 6. Второй, 16-ти элементарных триггеров), который включает ИМ
третий и четвертый входы второго СРВ 13 подключены соответственно к второму выходу первого СРВ 10, к выходу первого ЗД 1 и к выходу четвертого 15 ЗД 12.
Система построена на известных элементах. Таймер, схемы И и ИШ1, устройства сравнения, триггер и завключает ИМ 4 на полную мощность (включает 16 генераторов СО,). При 4
этом на выходе ИМ нал подачи СО, и в
появляется сиг- КС 3 поступает
максимальное количество СО,
Колимомент t, система отрабатывает и обеспечивает наиболее быстрое повышение концентрации СО в КС 3 до уровня С, 25 теме,
Известно, что для этого к сис- которая начинает движение в
чество углекислоты, подаваемой в КС 3, является управляющим воздействием и в системе. Максимальное U в систе- поминающее устройство могут быть pea- 20 ме примем равным 1. Таким образом, в лизованы на цифровых микросхемах, например серии К155, а счетно-решающие блоки - на больших интегральных схемах, например микропроцессорного комплекта серии КР580. В качестве аналого-цифрового преобразователя может быть использован цифровой вольтамперметр типа D168000, а в качестве газоанализатора - оптико-акустический прибор типа ГОА-4,
Автоматизированная система газоподкормки, например углекислым газом работает следующим образом.
На ЗД 1, 9, 11 и 12 устанавливают соответственно время начала сеанса
момент t| под действием управления , необходимо приложить управление
1чу СО,) через про- отсчитьгеаемый от
(прекратить подачу СО,) через промежуток времени t
п
30 t, , который определяется из соотношения
35
- l-exp( -вхр(-Ц/Т,)
подкормки t, , время окончания сеанса t, уровень концентрации СО, по достижении которой измеряют сигнал ГА 2 (величину этой установки подбирают при пуско-наладочных работах), и желаемый (заданный) уровень концентрации углекислоты при подкормке растений,
Сигнал на выходе ТМ 14 постоянно нарастает и становится равным сигналу в момент t,, При этом на выходе УС 5 появляется сигнал, поступающий на второй вход ИЛИ 20. Количество элементов ИЛИ в блоке 20 равно количеству, например, генераторов СО в блоке Ш 4 (допустим, имеется 16 г.е- нераторов). Сигнал с УС 5 поступает одновременно на все вторые входы всех элементов ИЛИ 20 (одним проводом) и проходит на выход каждого элемента ИЛИ 20 (на выход 16-ти элементов ИЛР). Далее этот сигнал (16 сит налов или 16 единиц в выходном ко- де ИЛИ 20) поступает на S-вход ТР 22,
ко:п{чество элементарных триггеров в котором равно количеству элементов 1ПИ в блоке 20. Каждый из 16-ти выходов : лемента ИЛИ блока 20 свяэан с S-входом одного элементарного триггера блока 22. Поэтому при поступлении с выхода ИЛИ 20 сигнала на S-вход ТР 22 на выходе последнего появляется
сигнал (в виде единиц на выходах всех 16-ти элементарных триггеров), который включает ИМ
включает ИМ 4 на полную мощность (включает 16 генераторов СО,). При 4
этом на выходе ИМ нал подачи СО, и в
появляется сиг- КС 3 поступает
максимальное количество СО,
Колимомент t, система отрабатывает и обеспечивает наиболее быстрое повышение концентрации СО в КС 3 до уровня С, теме,
Известно, что для этого к сис- которая начинает движение в
чество углекислоты, подаваемой в КС 3, является управляющим воздействием и в системе. Максимальное U в систе- ме примем равным 1. Таким образом, в
чество углекислоты, подаваемой в КС 3, является управляющим воздействием и в системе. Максимальное U в систе- ме примем равным 1. Таким образом, в
момент t| под действием управления , необходимо приложить управление
1чу СО,) через про- отсчитьгеаемый от
(прекратить подачу СО,) через промежуток времени t
п
чество углекислоты, подаваемой в КС 3, является управляющим воздействием и в системе. Максимальное U в систе- ме примем равным 1. Таким образом, в
t, , который определяется из соотношения
- l-exp( -вхр(-Ц/Т,)
(1)
где коэффициент передачи К и постоянные времени Т, и Т - параметры передаточной функции системы
w(p)
-То
7т,р+Т)7тгр+Т)
р
имеющей чистое запаздьшание с . Тогда через промежуток времени t, 45 отсчитьшаемый от t, , который равен Т,- Tj l-exp(-tjT2)
f-;-if In 7i--;7it;75;) .(2)
концентрация углекислоты достигнет 5 C с нулевой скоростью ее изменения. Если в это время начать подачу СО2 в количестве, соответствующем управлению и :
55
ir
и - Y
(3)
то концентрация углекислоты будет поддерживаться на уровне Су. При таком управлении (по времени) чистое
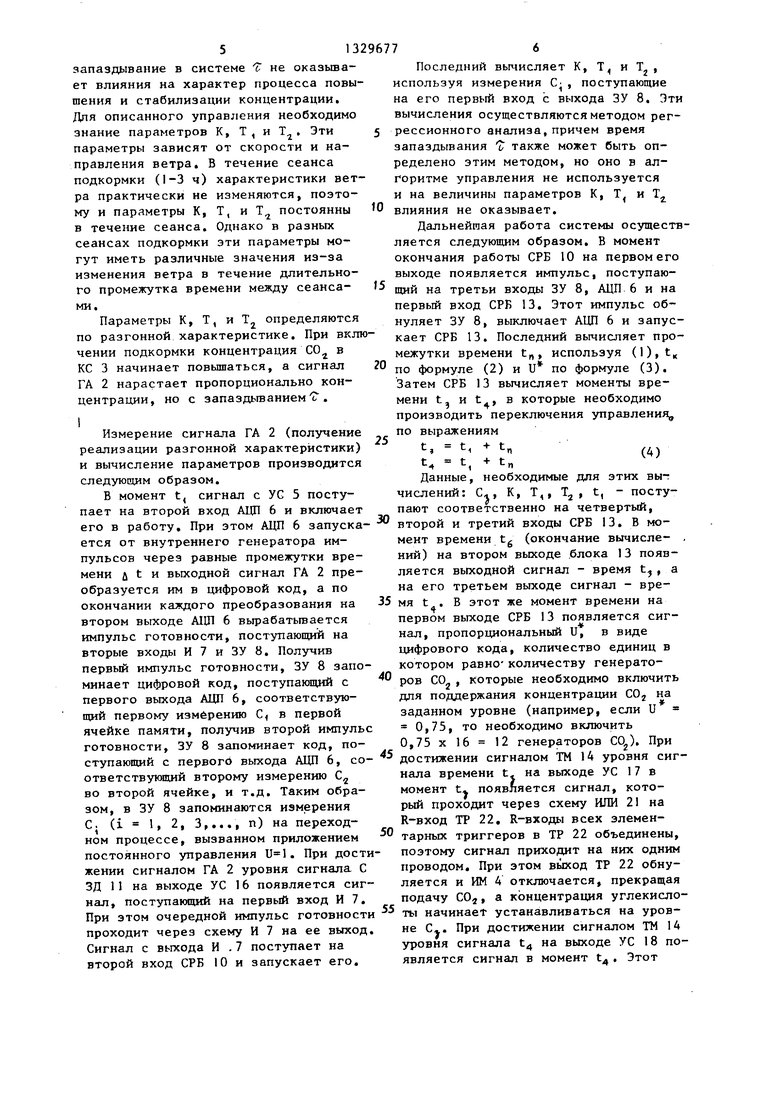
513
запаздывание в системе 1 не оказьша- ет влияния на характер процесса повышения и стабилизации концентрации. Дпя описанного управления необходимо знание параметров К, Т , и Т.. Эти параметры зависят от скорости и направления ветра, В течение сеанса подкормки (1-3 ч) характеристики ветра практически не изменяются, поэтому и параметры К, Т, и Т постоянны в течение сеанса. Однако в разных сеансах подкормки эти параметры могут иметь различные значения из-за изменения ветра в течение длительного промежутка времени между сеанса- ми.
Параметры К, Т, и Т, определяются по разгонной характеристике. При включении подкормки концентрация СО в КС 3 начинает повышаться, а сигнал ГА 2 нарастает пропорционально концентрации, но с запаздьгеанием (Г .
Измерение сигнала ГА 2 (получение реализации разгонной характеристики) и вычисление параметров производится следующим образом.
В момент t сигнал с УС 5 поступает на второй вход АЦП 6 и включает его в работу. При этом АЦП 6 запускается от внутреннего генератора импульсов через равные промежутки времени U t и выходной сигнал ГА 2 преобразуется им в цифровой код, а по окончании каждого преобразования на втором выходе АЦП 6 вьфабатьшается импульс готовности, поступающий на вторые входы И 7 и ЗУ 8. Получив первый импульс готовности, ЗУ 8 запоминает цифровой код, поступающий с первого выхода АЦП 6, соответствую- 1ЦИЙ первому измерению С в первой ячейке памяти, получив второй импульс готовности, ЗУ 8 запоминает код, поступающий с первого выхода АЦП 6, со- ответствукиций второму измерению С во второй ячейке, и т.д. Таким образом, в ЗУ 8 запоминаются измерения С. (i 1, 2, 3,,.,, п) на переходном процессе, вызванном приложением постоянного управления . При достижении сигналом ГА 2 уровня сигнала С ЗД 11 на выходе УС 16 появляется сигнал, поступающий на первый вход И 7, При этом очередной импульс готовности проходит через схему И 7 на ее выход Сигнал с выхода И .7 поступает на второй вход СРВ 10 и запускает его.
t5
0
го
5
30
Последний вычисляет К, Т, и Т , используя измерения С, поступающие на его первый вход с выхода ЗУ 8. Эти вычисления осуществляются методом регрессионного анализа,причем время запаздывания также может быть определено этим методом, но оно в алгоритме управления не используется и на величины параметров К, Т и Т,
влияния не оказывает.
Дальнейшая работа системы осуществляется следующим образом. В момент окончания работы СРВ 10 на первом его выходе появляется импульс, поступающий на третьи входы ЗУ 8, АЦП 6 и на первый вход СРВ 13, Этот импульс обнуляет ЗУ 8, выключает АЦП 6 и запускает СРВ 13. Последний вычисляет промежутки времени t, используя (l),t по формуле (2) и U по формуле (3). Затем СРВ 13 вычисляет моменты времени t и t , в которые необходимо производить переключения управления по выражениям
t, t. - ь„
t. t. + t,
55
(А)
-4 -1 -n
Данные, необходимые для этих выг числений: С-, К, Т,, Т , t, - поступают соответственно на четвертый, второй и третий входы СРВ 13. В момент времени tg (окончание вычисле- . НИИ) на втором выходе блока 13 появляется выходной сигнал - время t, а на его третьем выходе сигнал - вре35 мя t . В этот же момент времени на первом выходе СРВ 13 появляется сигнал, пропорциональный U, в виде цифрового кода, количество единиц в котором равно количеству генерато ров СО-, которые необходимо включить для поддержания концентрации COj на заданном уровне (например, если U 0,75, то необходимо включить 0,75 X 16 12 генераторов СО). При
5 достижении сигналом ТМ 14 уровня сигнала времени t на выходе УС 17 в
зля
50
момент t появляется сигнал, кото- рьА проходит через схему ИЛИ 21 на R-вход ТР 22, R-входы всех элементарных триггеров в ТР 22 объединены, поэтому сигнал приходит на них одним проводом. При этом выход ТР 22 обнуляется и ИМ А отключается, прекращая подачу СО, а концентрация углекислоты начинает устанавливаться на уровне Cj, При достижении сигналом ТМ 14 уровня сигнала t на выходе УС 18 появляется сигнал в момент t. . Этот
сигнал поступает на первый вход схемы И 19, Количество элементов И в блоке 19 равно количеству разрядов в коде, поступающем с первого выхода СРВ 13, и равно количеству элементов ИЛИ R блоке 20, Первые входы всех элементов И в блоке 9 объединены, поэтому сигнал с выхода УС 18 подается одним проводом. На второй вход каждого элемента И схемы 19 поступает один разряд цифрового кода с певого выхода СРВ 13, в котором может быть О или 1, Поэтому при появлении сигнала с выхода УС 18 на первом входе схемы И 19 на ее выходе (в выходном цифровом коде) появляетс столько 1, сколько их содержится в коде на первом выводе СРВ 13, т,е, сколько генераторов необходимо включить (например, 12 генераторов). Сигнал с выхода схемы И 19 проходит через ИЛИ 20 на S-вход ТР 22 и перебрасывает в нем столько элементарных триггеров, сколько единиц поступило с выхода И 19, включая необходимое количество генераторов СО, При этом в КС 3 подается количество СО, которое необходимо для поддержания концентрации углекислоты на заданном уровне,
При достижении сигналом с выхода ТМ 14 уровня сигнала времени конца газоподкормки на выходе УС 15 появляется сигнал, который проходит через ИЛИ 21 на К-вход ТР 22 и обнуляется его выход,. Подкормка заканчивается.
четвертому и пятому устройствам сра нения, выходы которых подключены со ответственно к второму входу второй схемы ИЛИ и к. второму входу дополни
Улучшение качества регулирования
в предлагаемой системе состоит в мак- 40 тельной схемы И, симально быстром затухании переходно- 2, Система по п,1, го процесса, который не сопровождается перерегулированием и автоколебаниями, обеспечивая повьшение точности регулирования до заданного уровня, 5 аналого-цифровому преобразователю
запоминающего устройства, а также
о т л и ч а ю
щ а я с я тем, что программный бло управления газоподкормкой выполнен в виде последовательно подключенных
Формула изобретения
1, Автоматизированная система газоподкормки растений в культивацион- gQ ству и к аналого-цифровому преобразоных сооружениях, включающая таймер, подключенный к входам первого и второго устройств сравнения, вторые входы которых подключены соответственно к первому задатчику времени начала и
к второму задатчику времени конца газоподкормки, а выходы - через первую и вторую схемы ИЛИ к S- и R-BXO- да-м триггерной схемы у правления исполнительным механизмом подачи газа в культивационное сооружение, оснащенное газоанализатором, выход которого подключен к аналого-цифровому преобQ разователю и к третьему устройству сравнения, к второму входу которого подключен третий задатчик уровня концентрации, а выход - к программному блоку управления газоподкормкой, при5 чем выход третьего устройства сравнения 4ерез первую схему И подключен к программному блоку управления газоподкормкой, а выход первого устройства сравнения - к аналого-цифровому
Q преобразователю, отличающая- с я тем, что, с целью повьяпения качества газоподкормки, например углекислым газом, система снабжена четвертым задатчиком конечной концентра5 ции газа в культивационном сооружении, подключенным к программном блоку управления газоподкормкой, четвертым и пятым устройствами сравнения, входы которых подключены к таймеру,
0 и дополнительной схемой И, выход которой подключен к второму входу первой схемы ИЛИ, а входы - к выходам пятого устройства сравнения и программного блока управления газоиод,- кормкой, подключенного выходами к
четвертому и пятому устройствам сравнения, выходы которых подключены соответственно к второму входу второй схемы ИЛИ и к. второму входу дополнительной схемы И, 2, Система по п,1, аналого-цифровому преобразователю
о т л и ч а ющ а я с я тем, что программный блок управления газоподкормкой выполнен в виде последовательно подключенных
первого и второго счетно-решающих блоков, выход первого из которых подключен также к запоминающему устройвателю, а дополнительные входы второго связаны с выходами четвертого за- датчика конечной концентрации и первого задатчика времени начала газо- 5g подкормки.


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система подкормки тепличных растений углекислым газом | 1988 |
|
SU1542481A1 |
| Система газации растений в теплицах | 1987 |
|
SU1442132A1 |
| Автоматизированная система подкормки тепличных растений углекислым газом | 1988 |
|
SU1628889A1 |
| МНОГОКАНАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2009453C1 |
| Мостовое устройство для сельскохозяйственных работ | 1989 |
|
SU1625357A1 |
| СПОСОБ ПОДКОРМКИ ЗЕЛЕННЫХ КУЛЬТУР ЧИСТЫМ УГЛЕКИСЛЫМ ГАЗОМ | 2009 |
|
RU2402898C1 |
| Аналого-цифровой преобразователь | 1979 |
|
SU911722A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНТЕНСИВНОСТИ ФОТОСИНТЕЗА РАСТЕНИЙ В КУЛЬТИВАЦИОННОМ СООРУЖЕНИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2030855C1 |
| Способ измерения концентрации компонентов газовых смесей и устройство для его осуществления | 1986 |
|
SU1354074A1 |
| УСТРОЙСТВО ДЛЯ СПЕКТРАЛЬНОГО АНАЛИЗА | 1991 |
|
RU2031375C1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение качества газоподкормки. Цри включении по времени углекислотной подкормки в воздухе культивационного сооружения (КС) 3 начинается переходный процесс установления новой концентрации СО. Мгновенные значения (Л f0
| Рысс А.А | |||
| Автоматизация технологических процессов в защищенном грунте | |||
| М.: Россельхозиздат, 1983, с.Д9- 51 . |
