возможностью перемещения вдоль нее. Кисть 17 верхней конечности манекена несет мяч и связана со штоком 27 пневмоцилиндра 24, Пневмоцилиндр установлен на стойке 3 с возможностью изменения угла наклона к ней и перемещения вдоль нее. Блок управления 8 управляет работой пневмотолкателя и средством оперативной информации о начале атакующих действий. Сигнализатор 44 установлен на звене 16 верхней конечности и через блок временной задержки связан с датчиком положения 42 смежных звеньев верхней ко1
Изобретение относится к спортивным тренажерам, а именно к устройствам для тренировки баскетболистов. Целью изобретения является повышение эффективности тренировки путем имитации реальных условий единоборства баскетболистов.
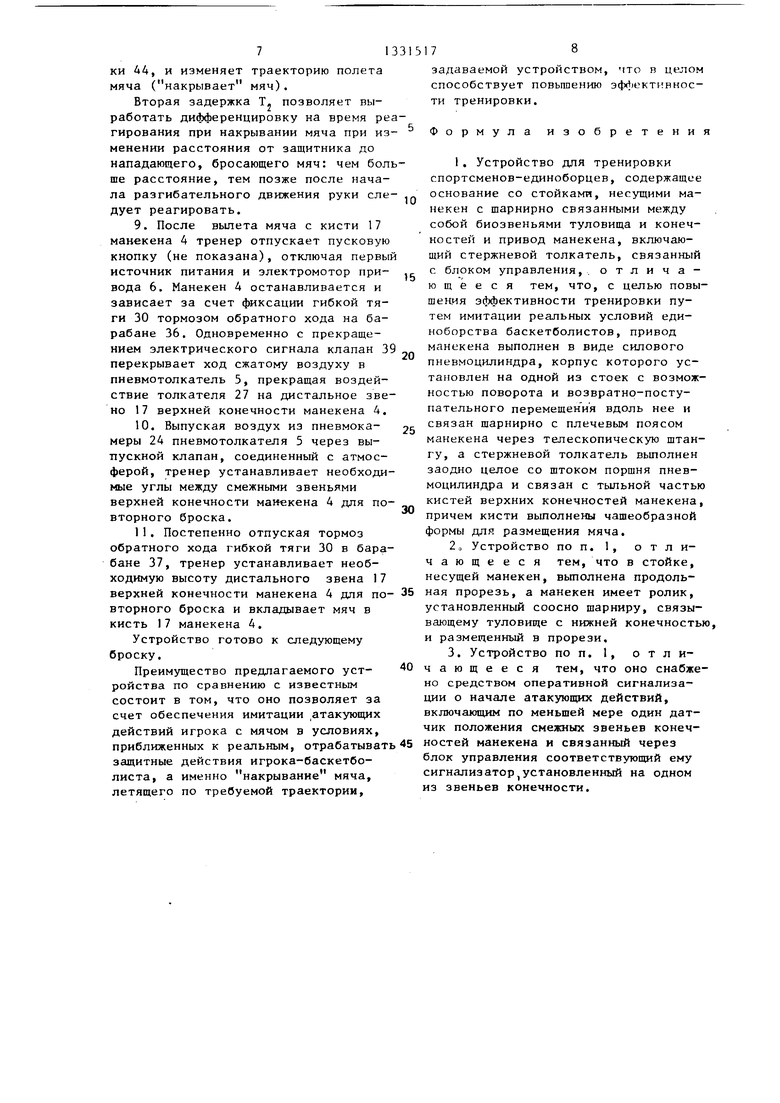
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - схема блока временной задержки.
Устройство содержит основание 1, установленные на нем первую 2 и вторую 3 стойки, манекен 4, пневмотолка- тель 5 мяча, привод 6 вращения, источник 7 сжатого воздуха, блок 8 управления и средство оперативной информации о начале атакующих действий.
Основание 1 выполнено в виде тележки для перемещения в горизонтальной плоскости. На нем вертикально установлена первая стойка 2, имеющая продольную прорезь 9. Манекен 4 установлен в прорези 9 первой стойки 2 с возможностью перемещения вдоль нее вверх - вниз с помощью роликов на оси шарниров (не показаны). Манекен 4 содержит голову 10, туловище 11, соединенные между собой неподвижно, и многозвенные нижние и верхние конечности. Нижние конечности состоят из последовательно соединенных с помощью шарниров звеньев 12-14. Верхние конечности состоят из последовательно со1 Диненных с помощью шарниров звеньев 15-17. При этом смежные звенья
нечности. Привод 6 перемещает пнев- мотолкатель 5 мяча и манекен 4. Кисть 17 движется вперед - вверх и одновременно вращается вперед вокруг оси шарнира, воединяющего его со з&еном 16. Мяч при этом вылетает из кисти 17 вперед-вверх. При разгибании локтевого сустава верхней конечности манекена 4 на определенный угол электрический сигнал через контакты датчика 42 передается на блок временной задержки, который через установленную задержку включает лампочку 44. 2 3.п. ф-лы, 2 ил,
верхних и нижних конечностей установлены с возможностью изменения угла между ними в вертикальной плоскости. Звенья 12 (бедро) и 15 (плечо) соединены соответственно с нижним и верхним концами туловища 11 манекена 4 с возможностью изменения угла между туловищем и бедром и туловищем и плечом; соединения осуществлены с помощью шарниров..Вторая стойка 3 закреплена неподвижно параллельно первой стойке 2 на основании 1 и имеет кро«- штейн (не показан), на котором подвешена вертикальная направляющая 18,
имеющая продольную прорезь 19, в которой с помощью роликов 20 и крепежных планок 21 установлена с возможностью перемещения вдоль направляющей 18 круговая направляющая (кулиса) 22,
имеющая прорезь 23. Пневмотолкатель 5 мяча содержит силовой пневмоцилиндр 24, внутри которого находятся пневмо- камера 25, образованная стенками и подпружиненным поршнем 26 с толкателем 27. Пневмокамера 25 имеет выпускной клапан (не показан) с ручным управлением, соединяющий пневмокамеру 25 с атмосферой. Наружный конец толкателя 27 соединен шарнирно (не показано) с кистью 17 верхней конечности манекена 4. Кроме этой точки крепления Пневмотолкатель 5 мяча имеет еще три точки крепления:
1) пневмоцилиндр 24 в задней части
установлен в продольной прорези 23 круговой направляющей 22 с возможностью перемещения вдоль нее и фиксаци С помощью винта 28;
2)спереди - снизу пневмоцилиндр 24 крепится шарнирно (не показано) чере соединенную с ним телескопическую штагу 29 регулируемой длины с плечевым поясом 11 манекена А;
3)сверху пневмоцилиндр 24 крепится с помощью гибкой тяги 30, перекин той через ролик 31, установленный на пневмоцилиндре 24,и через ролики 32 и
33,установленные на кронщтейне,и закрепленной одним своим концом на верхней части превмоцилиндра 24 через барабан 34 с ручкой вращения 35 и фиксатором-томозом (не показан), а другим концом на барабане 36, установленном на валу 37 электродвигателя привода 6 вращения.
Привод 6 вращения установлен неподвижно на основании 1 и состоит из электромотора, на валу 37 которого установлен барабан 36 для намотки гибкой тяги 30, снабженный фиксато- ром-тормозом обратного хода гибкой тяги 30. Кисть - дистальное звено 17 - манекена выполнена с выемкой чашеобразной формы так, чтобы мяч, вложенный в нее, не скатывался с нее самопроизвольно. Все описанные элементы устройства, кроме манекена 4 могут быть выполнены из металла. Манекен может быть выполнен из легких и прочных пластмасс. Источник сжатого воздуха 7 содержит камеру 38 со сжатым воздухом и электрически управляемый клапан 39. Камера 38 со сжатым воздухом через клапан 39 и трубопровод 40 соединена пневматически с пневмокамерой 25 пневмотолкате- ля 5 мяча. Блок 8 управления содержит последовательно соединенные первый источник питания (не показан) и первый регулируемый блок (не показан) временной задержки электросиг- нала с помощью ручки 41, выход которого является вторым выходом блока 8 управления и соединен с электрическим входом пневмоклапана 39, а выход источника питания является первым выходом блока 8 управления и соединен также с управляющим входом привода 6, Кроме того, блок управления содержит последовательно соединенные датчик 42 угла, второй источник пи- тания (не показан) и второй регулируемый блок (не показан) временной задержки электросигнала с помощью ручки 43. Выход второго регулируемого
g
с р
5 5 5
0
блока временной задержки электросигнала является дополнительным выходом блока 8 управления и электрически соединен с сигнализатором (электрической лампочкой) 44. Установка времени задержки производится ручным способом с помощью ручек 41 управления (первый регулируемый блок временной задержки электросигнала) и 43 (второй регулируемый блок временной задержки электросигнала). С помощью ручки 41 управления первым блоком задержки устанавливают время задержки включения электрического пневмоклапана 39 (определяющего выстрел пневмо- толкателя 5 мяча) по отношению к моменту включения электромотора привода 6 (определяющего начало подъема манекена вверх). С помощью ручки 43 управления вторым блоком задержки устанавливают время задержки включения электрической лампочки 44 (сигнализирующей о начале реагирования защитника на выброс мяча манекеном) по отношению к моменту замыкания контактов в датчике 42 угла в локтевом суставе (между звеньями 15 и 16) манекена 4 (моменту достижения определенного угла между звеньями 15 и 16 после, начала разгибания в локтевом суставе манекена). Механизм оцератив- ной информации о начале атакующих действий содержит датчик 42 угла в локтевом суставе манекена 4 и сигнализатор (электрическую лампочку) 44. Датчик угла 42 может быть выполнен в виде лимба, неподвижно и соосно закрепленного на оси (не показана) шарнира между смежными звеньями 15 и 16 верхней конечности манекена 4. К лимбу прикрепляются электрические контакты, подсоединенные через источник питания и второй регулируемый блок временной задержки электросигнала к электрической лампочке 44, установленной на звене 16.
Устройство работает следующим образом.
1.Подвижное основание 1 с закрепленным на нем устройством устанавливают в том месте площадки, которое соответствует началу атаки.
2.Устанавливают необходимую высоту дистального звена 17 верхней конечности манекена 4. Дпя этого, сняв тормоз, ручкой 35 вращения вращают барабан 34, установленный на верхней части пневмоцилиядра 24, уменьшая или
513
увеличивая длину гибкой тяги 30 и соответственно одновременно опуская или поднимая пневмотолкатель 5 мяча и манекен 4, связанные между.собой с помощью телескопической штанги 29 и толкателя 27, Высоту дистального звена 17 изменяют в зависимости от роста игроков.
3. Устанавливают необходимый угол вылета мяча. Для этого, отпустив винт
28,заднюю часть пневмоцилиндра 24 перемещают вверх или вниз вдоль прорези 23 круговой направляющей 22, соответственно уменьшая или увеличивая угол наклона пневмотолкателя 5 мяча к плоскости основания 1. Этот же угол можно уменьшить или увеличить, одновременно изменяя углы между смежными звеньями 15 и 16 и 16 и 17 верхней конечности манекена 4, за счет соответственного уменьшения или увеличения длины телескопической штанги
29.Для этого, сняв фиксатор, уменьшают или увеличивают длину штанги 29 вдвигая или выдвигая верхнюю составляющую штанги 29, а затем снова жестко закрепляют ее длину фиксатором. Возможность изменения угла вылета мяча позволяет имитировать различную технику бросков мяча по траектории выброса. А возможность изменения угла между смежными звеньями верхней конечности манекена позволяет имитировать различную технику бросков мяча, определяемую, в том числе, и различной степенью сгибания в суставах руки в исходном положении для броска.
4.Вкладывают мяч в кисть 17 манекена 4.
5.С помощью ручки 41 управления блока 8 управления устанавливают необходимое время Т задержки включени электрического пневмоклапана 39 по отношению к моменту включения элект- ромотора привода 6.
6.С помощью ручки 43 управления блока 8 управления устанавливают необходимое время Tj задержки включени сигнальной лампочки 44 по отношению к моменту замыкания электрических контактов в датчике 42 угла между смежными звеньями 15 и 16 верхней конечности манекена 4.
Таким образом, манекен готов к броску мяча.
7.Спортсмен занимает.место на определенном расстоянии перед манекеном и готов реагировать на бросок.
5
6
51
5
0
5
0
5
0
7в
8. Тренер нажимает на пусковую кнопку (не показана), включая первый источник питания и, следовательно, электрический мотор привода 6. Гибкая тяга 30, наматываясь на барабан 36, установленный на валу 37 электродвигателя привода 6, поднимает одиовре- менно пневмотолкатель 5 мяча и манекен 4, связанные между собой с помощью телескопической штанги 29 и толкателя 27. Через установленное время Т, задержки напряжение от первого источника подается на второй выход блока 8, открывается э: ектрический пнев- моклапан 39 и воздух из камеры 38 источника сжатого воздуха 7 по трубопроводу 40 устремляется в пневмока- меру 25 пневмотолкателя 5, давит на его поршень 26 и соединенный с ним толкатель 27, толчкообразное движение которого вперед вызывает резкое разгибание верхней конечности манекена 4. При этом дистальное звено 17 движется вперед-вверх и одновременно вращается вперед вокруг оси, шарнир- но соединяющей его со звеном 16. За счет этого мяч, лежащий на дисталь- ном звене 17, вылетает с него вперед- вверх. Изменение величины первой задержки Т, позволяет имитировать и броски с места (пневмотолкатель 5 срабатывает, когда у манекена 4 дисталь- ные звенья 14 нижней конечности еще не оторвались от пола, идет только разгибание под собственной тяжестью в суставах нижней конечности манекена при подъеме его ), и броски в прыжке (пневмотолкатель 5 срабатывает позже, когда манекен 2 уже оторвался от опоры).
Разгибание верхней конечности манекена 4 происходит одновременно и в лучезапястном (соединение звеньев 16 и 17), ив локтевом (соединение звеньев 15 и 16) суставах. При разгибании в локтевом суставе верхней конечности манекена 4 на определенный угол (определяется положением контактов Б лимбе) замыкаются электрические контакты в датчике 42 угла, и электрический сигнал от второго источника питания через контакты датчика 42 угла посылается во второй регулируемый блок временной задержки злектро- сигнала (не показан),который через установленную задержку Т, включает сигнальную лампочку 44, установленную на звене 16. Спортсмен выпрыгивает вверх, реагируя на зажигание лампоч71331517
44, и изменяет траекторию полета а (накрывает мяч).
Вторая задержка Т, позволяет выотать дифференцировку на время реаования при накрывании мяча при из- ении расстояния от защитника до адающего, бросающего мяч: чем больрасстояние, тем позже после начазасп ти
Ф
сп ос не со но щи с ю ше те но ма пн та но па св ма гу за мо ки пр фо
ла разгибательного движения руки следует реагировать.
9.После вылета мяча с кисти 17 манекена 4 тренер отпускает пусковую кнопку (не показана), отключая первы источник питания и электромотор при- вода 6. Манекен 4 останавливается и зависает за счет фиксации гибкой тяги 30 тормозом обратного хода на барабане 36. Одновременно с прекращением электрического сигнала клапан 3 перекрывает ход сжатому воздуху в пневмотолкатель 5, прекращая воздействие толкателя 27 на дистальное звено 17 верхней конечности манекена 4.
10.Выпуская воздух из пневмока- меры 24 пневмотолкатепя 5 через вы- тгускной клапан, соединенный с атмосферой, тренер устанавливает необходимые углы между смежными звеньями верхней конечности манекена 4 для повторного броска.
11.Постепенно отпуская тормоз обратного хода гибкой тяги 30 в барабане 37, тренер устанавливает необходимую высоту дистального звена 17 верхней конечности манекена 4 для по вторного броска и вкладывает мяч в кисть 17 манекена 4.
Устройство готово к следующему броску.
Преимущество предлагаемого уст- ройства по сравнению с известным состоит в том, что оно позволяет за счет обеспечения имитации ,атакующих действий игрока с мячом в условиях, приближенных к реальным, отрабатыват защитные действия игрока-баскетболиста, а именно накрывание мяча, летящего по требуемой траектории.
8
0
5
5
5
0
задаваемой устройством, что в целом способствует повьппению эф()ект1 внос- ти тренировки.
Формула изобретения
1. Устройство для тренировки спортсменов-единоборцев, содержащие основание со стойками, несущими манекен с шарнирно связанными между собой биозвеньями туловища и конечностей и привод манекена, включающий стержневой толкатель, связанный с блоком управления,, отличающееся тем, что, с целью повышения эффективности тренировки путем имитации реальных условий единоборства баскетболистов, привод манекена выполнен в виде силового пневмоцилиндра, корпус которого установлен на одной из стоек с возможностью поворота и возвратно-поступательного перемещения вдоль нее и связан шарнирно с плечевым поясом манекена через телескопическую штангу, а стержневой толкатель выполнен заодно целое со штоком поршня пневмоцилиндра и связан с тыльной частью кистей верхних конечностей манекена, причем кисти выполнены чашеобразной формы для размещения мяча.
2 о Устройство по п. 1, отличающееся тем, что в стойке, несущей манекен, вьтолнена продольная прорезь, а манекен имеет ролик, установленный соосно шарниру, связывающему туловище с нижней конечностью, и размещенный в прорези.
3. Устройство по п. 1, отличающееся тем, что оно сиабже- но средством оперативной сигнализации о начале атакующих действий, включающим по меньшей мере один датчик положения смежных звеньев конечностей манекена и связанный через блок управления соответствующий ему сигнализатор установленный на одном из звеньев конечности.
/
1331517
блок временной .
Вход
Контакты еле времени
8ыхо9

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БАСКЕТБОЛИСТОВ | 1994 |
|
RU2072136C1 |
| ТРЕНАЖЕР | 2010 |
|
RU2454260C1 |
| Способ восстановительного лечения пациентов с субактромиальным импинджмент-синдромом | 2021 |
|
RU2773596C1 |
| Устройство для тренировки баскетболистов | 1991 |
|
SU1801526A1 |
| Способ восстановления функций верхней конечности у пациентов со спинномозговой травмой на шейном уровне | 2020 |
|
RU2747678C1 |
| Способ реабилитации детей с неврологическими осложнениями, связанными с химиотерапией при остром лимфобластном лейкозе | 2022 |
|
RU2789174C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ БАСКЕТБОЛЬНОГО БРОСКА | 2000 |
|
RU2153378C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ МЫШЕЧНОГО ТОНУСА У ДЕТЕЙ СО СПАСТИЧЕСКИМИ ФОРМАМИ ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА | 2011 |
|
RU2482827C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ И КООРДИНАЦИИ У ДЕТЕЙ В РАННЕЙ РЕАБИЛИТАЦИИ ПОЗВОНОЧНО-СПИННОМОЗГОВОЙ ТРАВМЫ С ПРИМЕНЕНИЕМ ИГРОВОГО МЕТОДА | 2014 |
|
RU2567796C1 |
Изобретение относится к спортивным тренажерам и позволяет повысить эффективность тренировки защитных действий баскетболистов путем имитации реальных условий единоборства. Устройство содержит манекен 4, установленный в прорези 9 стойки 2 с (Л со со СП 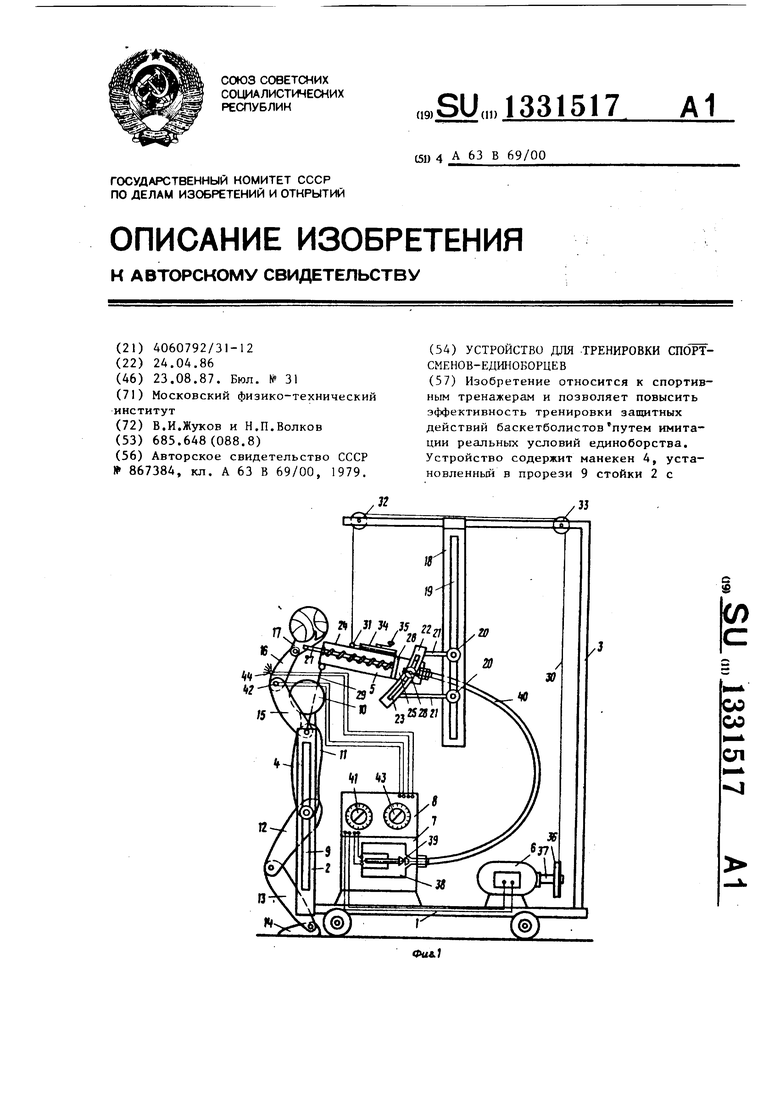
Реле Времени.
Редактор А.Ворович
Составитель Г.Царапов Техред М .Дидык
Заказ 3750/4
Тираж 396Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035 Москва. Ж-35, Раушская наб., д. Д/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Зимокосов
| Устройство для тренировки спортсменов | 1979 |
|
SU867384A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
