Изобретение относится к электромагнитным вибрационным устройствам и может быть использовано в вибропе- ремешивателях, вибростолах, стендах для вибрационных испытаний и т.п. Цель изобретения - расширение функциональных возможностей путем создания сложных плоскостных траекторий движения якоря.
На чертеже представлена электрическая схема вибропривода.
Вибропривод содержит четьфе электромагнита 1-4 и ферромагнитный якорь 5, закрепленный на подвижной системе (не показана). Электромагниты 1 и 3 расположены по оси Xj а электромагниты 2 и 4 - перпендикулярно им по оси У. Обмотки 6 и 7 электромагнитов 1 и 3 через последовательно включенные конденсаторы 8 и 9 подключены к источнику 10 переменного напряжения и образуют цепь питания этих электромагнитов. Обмотки 11 и 12 дополнительных электромагнитов 2 и 4 с подключенными к ним последовательно конденсаторами I3 и 14 образуют цепь питания дополнительных электромагнитов, которая подключена к выходу фазовращателя 15, а вход последнего соединен с источником 10 переменного напряжения.
Вибропривод работает следующим образом.
При включении источника 10 питания, якорь 5 начинает движение, обусловленное совокупным воздействием на него со стороны двух каналов, образованных электромагнитами 1 и 3 и 2 и 4 с соответствующими цепями питания. Процессы происходящие в каждом из этих каналов одинаковы и отличаются лишь сдвигом во времени, определяемым фазовращателем 15,
Канал, образованный электромагнитами 1 и 3 работает следующим образом.
Якорь первоначально притягивается к электромагниту 1. Емкости конденсаторов 8 и 9 подобраны таким образом, что при оговоренном движении якоря в цепи питания электромагнита 1, представляющей собой последовательный резонансный контур, происходит расстройка резонанса напряжений, а в цепи питания электромагнита 2 - настройка на резонанс из-за изменения индуктивностей обмоток 6 р 7, вызванного изменением воздушных зазоров. Это приводит к уменьшению напряжения на обмотке 6 и увеличению напряжения на обмотке 7. Соответственно ток в обмотке 6 уменьшается, а в обмотке 7 увеличивается. Это вызывает уменьшение тягового усилия, развиваемого электромагнитом I, и увеличение тягового усилия
электромагнита 3, Последнее приводит к тому, что якорь меняет направление движения на противоположное и начинает двигаться в сторону электромагнита 3.
По мере движения якоря резонансное состояние в цепи его питания расстраивается, а в цепи питания электромагнита 1 происходит настройка на резонанс. Как и ранее, это приводит
к изменению направления движения якоря и к возникновению незатухаюш 1х механических колебаний вдоль оси X, частота- которых определяется частотой собственных колебаний механической системы в указанном направлении.
Аналогичным образом работает канал, образованный дополнительными электромагнитами 2 и 4, что приводит к образованию незатухающих механических колебаний якоря вдоль оси У с частотой, определяемой собственной частотой колебаний механической системы в направлении оси У.
Вследствие того, что цепь питания
электромагнитов 2 и 4 подключена к источнику 10 питания через фазовращатель 15, силовое воздействие этого канала на якорь не совпадает по времени с воздействием, обусловленным
каналом, содержащим электромагниты 1 и 3, Это временное рассогласование, величина которого определяется углом сдвига фаз, приводит к возникновению сложного штоскопараплельного колебательного движения якоря в плоскости X - У с траекторией в виде фигур Лиссажу.
Регулируя фазовый сдвиг с помощью регулятора фазы, которым снабжен фазовращатель 15, можно в зависимости от обстоятельств изменять траекторию движения якоря и тем самым расширить функциональные возможности вибратора.
Формула изобретения
Вибропрнвод, содержаш ш электромагнитный вибратор, состоящий из двух электромагнитов, размещенных с двух сторон ферромагнитного якоря прямо31332475
угольной формы, закрепленного на под-и фазовращателем с регулятором фазы, вижной системе, и систему управления,причем обмотка каждого из основных включающую в себя источник перемен-электромагнитов подсоединена через ного напряжения и конденсатор, от- последовательно включенный конденса- личающийся тем, что, с це-тор непосредственно к зажимам источ- лью расщирения функциональных возмож-ника переменного напряжения, а обмот- ностей путем создания сложных плос-ка каждого из дополнительных электрокостных траекторий движения якоря,магнитов подсоединена через последо- вибропривод снабжен двумя дополнитель-10вательно включенный конденсатор к вы- ными электромагнитами, размещеннымиходу фазовращателя, врсод которого с двух сторон ферромагнитного якоря,подсоединен к зажимам источника пере- тремя дополнительными конденсаторамименного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибропривод | 1986 |
|
SU1363392A1 |
| Двухтактный электромагнитный вибратор | 1990 |
|
SU1762371A1 |
| Двухтактный электромагнитный вибратор переменного тока | 1984 |
|
SU1405099A1 |
| Вибропривод | 1987 |
|
SU1494158A1 |
| Двухтактный электромагнитный вибратор | 1984 |
|
SU1265934A1 |
| Электромагнитный вибратор | 1985 |
|
SU1356136A1 |
| Виброэлектропривод | 1987 |
|
SU1492428A1 |
| Устройство для управления виброприводом | 1988 |
|
SU1562891A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ И ЭЛЕКТРОМАГНИТНЫЙ ВИБРОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147941C1 |
| Вибропривод (его варианты) | 1982 |
|
SU1084936A1 |
Изобретение относится к электротехнике, а именно к электромагнитным вибрационным устройствам для вибро- перемешивателей, вибростолов, стендов для вибрационных испытаний. Цель состоит в расширении функциональных возможностей создания сложных плоскостньк траекторий движения якоря. Вибропривод содержит основные электромагниты I и 3, расположенные по оси X, и дополнительные электромагниты 2 и 4, расположенные по оси У, а также ферромагнитный якорь 5, закрепленный на подвижной системе. Вследствие того, что цепь питания электромагнитов 2 и 4 подключена к источнику 10 питания через фа-зовращатель 15, силовое воздействие этого канала на якорь не совпадает по времени с воздействием, обусловленным каналом, содержак1им электромагниты 1 и 3. Это временное рассогласование, определяемое углом сдвига фаз, приводит к возникновению сложного плоскопараллельного колебательного движения якоря с траекторией в виде фигур Лиссажу. I ил. 3 ел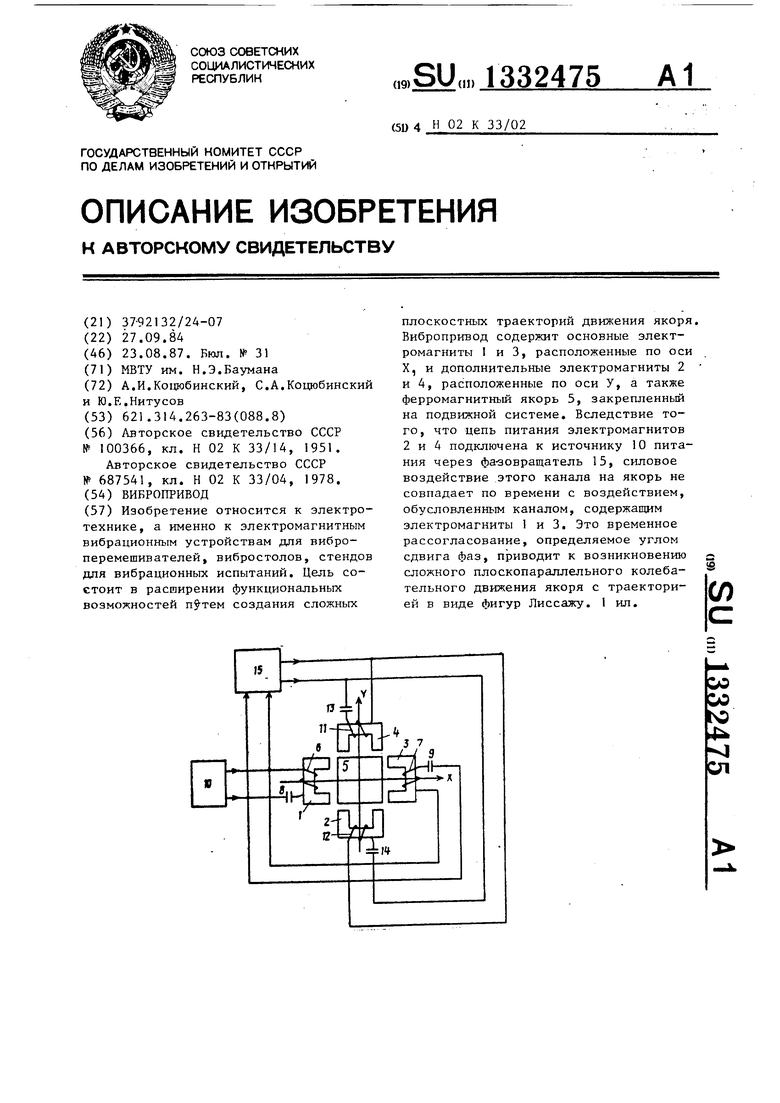
| Электромагнитный двигатель | 1951 |
|
SU100366A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромеханический преобразователь | 1978 |
|
SU687541A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
