Изобретение относится к электротехнике и может быть использовано в приводах виброперемешивателей, вибростолов, вибростендов и т.п.
Цель изобретения - обеспечение возможности регулирования амплитуды колебаний якоря и расширение диапазона регулирования.
На фиг« 1 представлена функциональная схема вибропривода| на фиг.
2- его .тические характеристики; на фиг. 3-функциональная схема вибропривода; на фиг, 4 - то же, вариант.
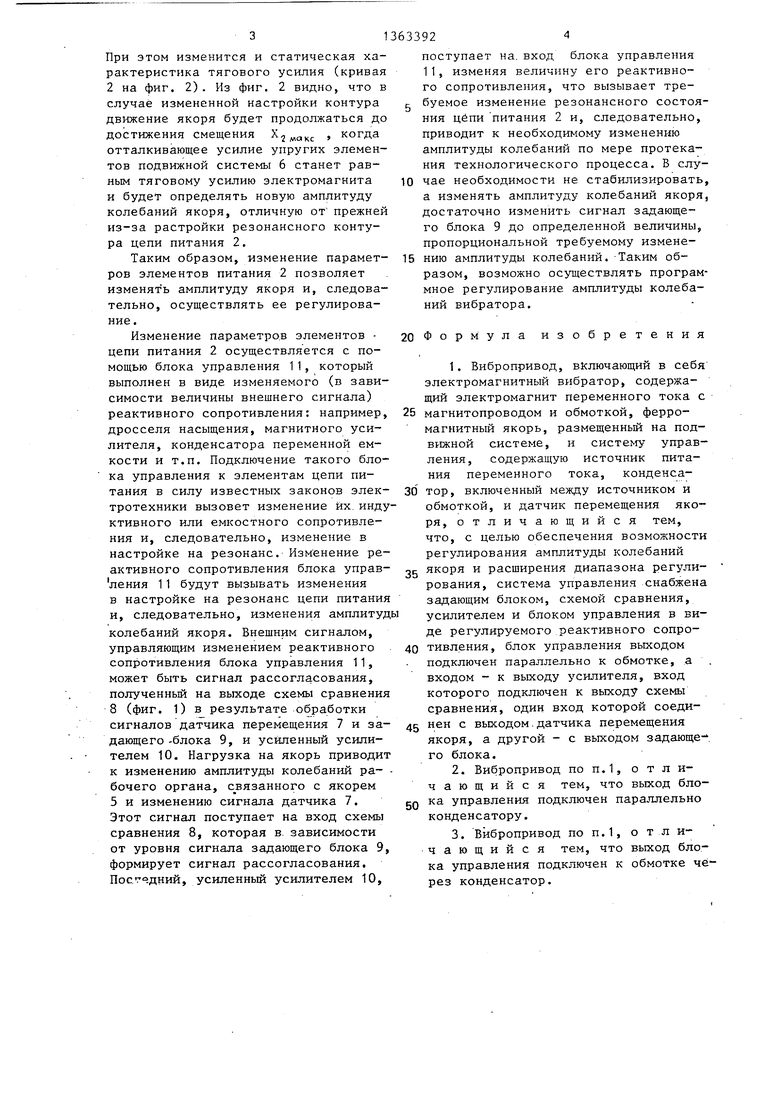
Вибропривод содержит электромагнит 1, цепь его питания 2, образованную обмоткой 3, последовательно с которой включен конденсатор 4, ферромагнитный якорь 5, закрепленный на подвижной системе 6 и связанный с ним датчик перемещений якоря 7. Выход датчика подключен к одному из входов системы сравнения 8, а к другому ее входу подключен выход задающего блока 9. Выход схемы сравнения 8 соединен со входом усилителя 10, а его выход соединен со входом блока управления 11. Последний подключен своим выходом параллельно обмотке 3 электромагнита Г.
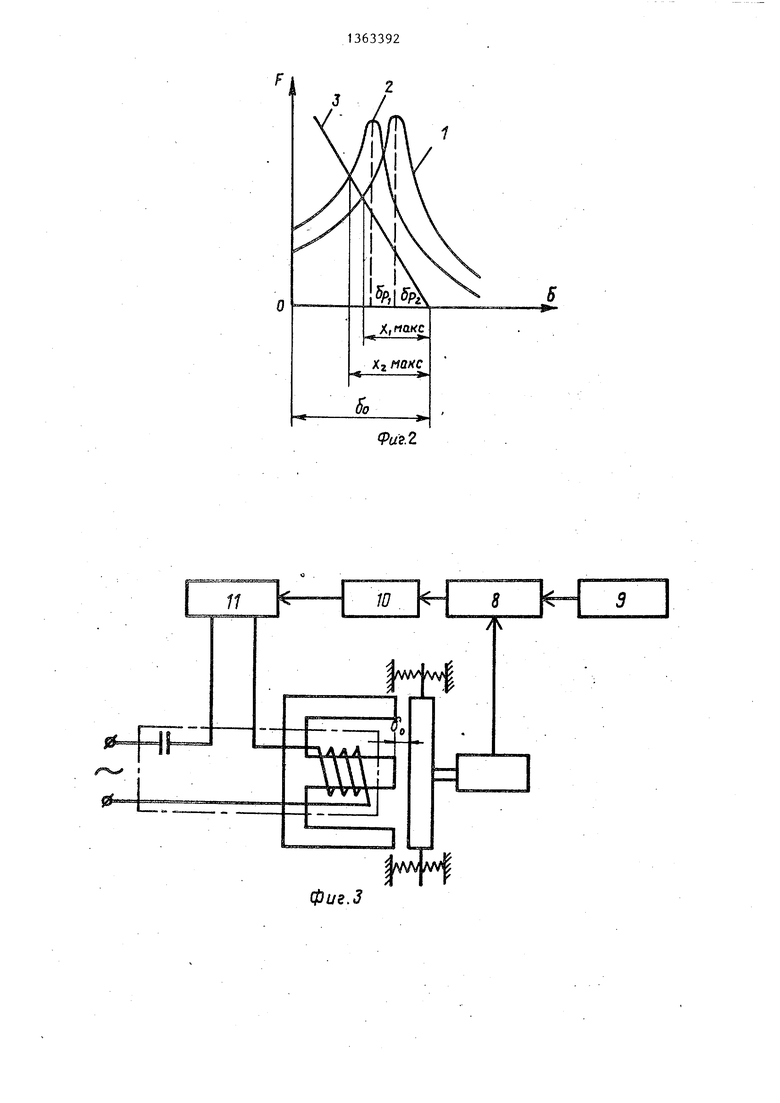
кроме Toroj возможен вариант, когда выход блока управления 11 включен последовательно с обмоткой 3 электромагнита 1.
Также возможен вариант, когда вы- ход блока управления 11 подключен параллельно конденсатору 4.
Устройство работает сл-едующим образом.
При подаче напряжения на о быотку
3электромагнита 1 начинается процесс притягивания якоря 5. Емкость
конденсатора 4 выбрана так, .что при некотором промежуточном зазоре между якорем и электромагнитом в цепи его питания возникает резонанс напряжений. Это приводит к значительному возрастанию напряжения на обмотке 3 электромагнита и увеличению тока в цепи, что влечет за собой езкое увеличение тягового усиления С кривая 1 на фиг.2). При дальейшем движении якоря 5 и уменьще- нии зазора между ними и электромагнитом 1 происходит расстройка резонана и, как следствие этого, уменьшение ягового усилия. Однако, при этом озрастает противодействующее усилие со стороны упругих элементов подвижной системы 6 (кривая 3 на фиг. 2). При некотором смещении якоря на величину усилие начнбт превьшать тяговое усилие электромагнита 1, что вызовет отталкивание якоря 5 и, следовательно, его движение в противоположном направлении. При этом, в силу переходных процессов, действующее на якорь 5 тяговое усилие электромагнита будет значительно меньшеJ чем в процессе его притяжения, что позволяет якорю совершать незатухающие колебания, определяемые собственной частотой колебаний механической системы.
При притяжении якоря 5, индуктивность обмотки 3 увеличивается, и,
dL
следовательно, 7- больше нуля. Это dt
приводит к увеличению напряжения на обмотке и возрастанию тягового усилия электромагнита. При отталкивании якоря 5 за счет упругих элементов подвижной, системы 6, индуктивность обмотки 3 уменьшается, и следовательно, --- меньше нуля. Это .приводит к уменьшению напряжения на
обмотке и, следовательно, к уменьшению магнитного потока и тягового усилия электромагнита.Тяговое усилие. электромагнита определяется напряже, di . Л
нием на катушке и L т-- + i -т-. dt dt
Таким образом, процесс притяжения якоря 5 осуществляется за счет значительного увеличения тягового усиЛИЯ электромагнита, а его обратное движение - за счет отталкивающего действия упругих элементов подвижной системы 6 при одновременном уменьшении тягового усилия. Это приводит к
возникновению устойчивых низкочастотных колебаний якоря, амплитуда которых определяется первоначальной настройкой контура, образованного обмоткой 3 конденсатором 4, на резонанс.
Эта настройка при выбранном начальном зазоре S g может характеризоваться некоторым резонансным зазором , (фиг. 2), положение которого на оси абсцисс зависит от величин параметров
резонансного контура: индуктивности L обмотки 3 и емкости конденсатора 4. Изменение указанных параметров приведет к изменению настройки,которая будет характеризоваться зазором S p,, .
При этом изменится и статическая характеристика тягового усилия (кривая 2 на фиг. 2). Из фиг. 2 видно, что в случае измененной настройки контура движение якоря будет продолжаться до достижения смещения Xj д,акс когда отталкивающее усилие упругих элементов подвижной системы 6 станет равным тяговому усилию электромагнита и будет определять новую амплитуду колебаний якоря, отличную от прежней из-за растройки резонансного контура цепи питания 2.
Таким образом, изменение параметров элементов питания 2 позволяет изменят ь амплитуду якоря и, следовательно, осуществлять ее регулирование.
Изменение параметров элементов - цепи питания 2 осуществляется с помощью блока управления 11, который выполнен в виде изменяемого (в зависимости величины внешнего сигнала) реактивного сопротивления: например, дросселя насыщения, магнитного усилителя, конденсатора переменной емкости и т.п. Подключение такого блока управления к элементам цепи питания в силу известных законов электротехники вызовет изменение их. индуктивного или емкостного сопротивления и, следовательно, изменение в настройке на резонанс. Изменение реактивного сопротивления блока управ- ления 11 будут вызывать изменения в настройке на резонанс цепи питания и, следовательно, изменения амплитуд колебаний якоря. Внешним сигналом, управляющим изменением реактивного сопротивления блока управления 11, может быть сигнал рассогласования, полученньй на выходе схемы сравнения 8 (фиг. 1) в результате обработки сигналов датчика перемещения 7 и задающего -блока 9, и усиленный усилителем 10. Нагрузка на якорь приводит к изменению амплитуды колебаний ра- бочего органа, связанного с якорем 5 и изменению сигнала датчика 7. Этот сигнал поступает на вход схемы сравнения 8, которая в. зависимости от уровня сигнала задающего блока 9, формирует сигнал рассогласования. Посл чдний, усиленный усилителем 10,
поступает на. вход блока управления 11, изменяя величину его реактивного сопротивления, что вызывает требуемое изменение резонансного состояния цепи питания 2 и, следовательно, приводит к необходимому изменению амплитуды колебаний по мере протекания технологического процесса. В слу0 чае необходимости не стабилизировать, а изменять амплитуду колебаний якоря, достаточно изменить сигнал задающего блока 9 до определенной величины, пропорциональной требуемому измене5 кию амплитуды колебаний.-Таким образом, возможно осуществлять программное регулирование амплитуды колебаний вибратора.
0 Формула изобретения
1.Вибропривод, включающий в себя электромагнитный вибратор, содержащий электромагнит переменного тока с
5 магнитопроводом и обмоткой, ферромагнитный якорь, размещенный на подвижной системе, и систему управления, содержащую источник питания переменного тока, конденса0 тор, включенный между источником и обмоткой, и датчик перемещения якоря, отличающийся тем, что, с целью обеспечения возможности регулирования амплитуды колебаний
С якоря и расширения диапазона регулирования, система управления снабжена задающим блоком, схемой сравнения, усилителем и блоком управления в виде регулируемого реактивного сопротивления, блок управления выходом подключен параллельно к обмотке, а входом - к выходу усилителя, вход которого подключен к выходу схемы сравнения, один вход которой соединен с выходом.датчика перемещения якоря, а другой - с выходом задающе- . го блока.
2.Вибропривод по П.1, отличающийся тем, что выход блока управления подключен параллельно конденсатору.
3.Вйбропривод по П.1, отличающийся тем, что выход блока управления подключен к обмотке через конденсатор.
0
5
0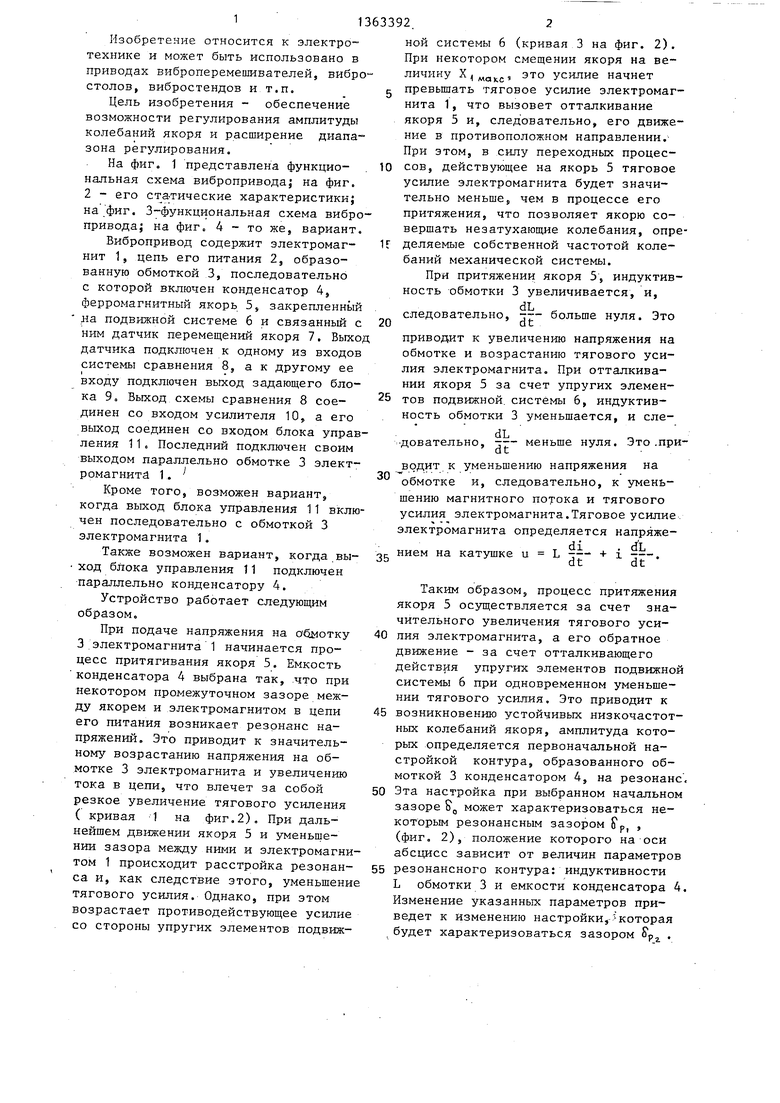
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброэлектропривод | 1987 |
|
SU1492428A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ И ЭЛЕКТРОМАГНИТНЫЙ ВИБРОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147941C1 |
| Двухтактный электромагнитный вибратор переменного тока | 1984 |
|
SU1405099A1 |
| Вибропривод | 1984 |
|
SU1332475A1 |
| Вибрационное устройство для уплотнения бетонной смеси | 1978 |
|
SU721330A1 |
| ВИБРОПРИВОД ШУМИХИНА | 1992 |
|
RU2025891C1 |
| Устройство питания электромагнитного вибровозбудителя | 1989 |
|
SU1644103A2 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| Вибропривод (его варианты) | 1982 |
|
SU1084936A1 |
| Вибрационный сепаратор | 1988 |
|
SU1538934A1 |
Изобретение относится к электротехнике и может быть использовано в приводах виброперемешивателей, вибростолов, вибростендов и т.п. Целью изобретения является обеспечение возможности регулирования амплитуды колебаний якоря и расширение диапазона регулирования. Вибропривод содержит электромагнит 1, цепь его питания 2., образованную обмоткой 3, последовательно с которой включен конденсатор 4, ферромагнитный якорь 5 и датчик 7 перемещений якоря. Выход датчика подключен к одному из входов схемы сравнения 8, а к другому ее входу подключен ёыход задающего блока 9. Выход схемы сравнения 8 соединен с входом усилителя 10, подсоединенного выходом к входу блока управления 11, выход которого может быть подключен параллельно конденсатору 4 и к обмотке 3 через конденсатор 5. Внешний сигнал управляет изменением реактивного сопротивления блока управ- с ления 11, а система управления с об- раТной связью по величине перемещения якоря приводит к необходимому изменению амплитуды колебаний якоря. 3 з.п. ф-лы, 4 ил. f H ZJОО О) ОО ОО со to
фие.З
I. -CZ
8
о
фуг, 4
Редактор И.Сегляник
Заказ 6375/50
, Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель В.Лавров
Техред Л.Сердюкова Корректор М.Максимишинец
| СПОСОБ КОЛОРИМЕТРИЧЕСКОГО ОПРЕДЕЛЕНИЯ ЯБЛОЧНОЙ КИСЛОТЫ | 0 |
|
SU191879A1 |
| 0 |
|
SU402395A1 | |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
