Изобретение относится к области йдерной энергетики, а именно к системам контроля положения органа регулирования ядерного реактора.
Цель изобретения - пойьавение надежности контроля положения органов регулирования путем увеличения уровней сигналов;, снимаемых с индуктивных катушек.
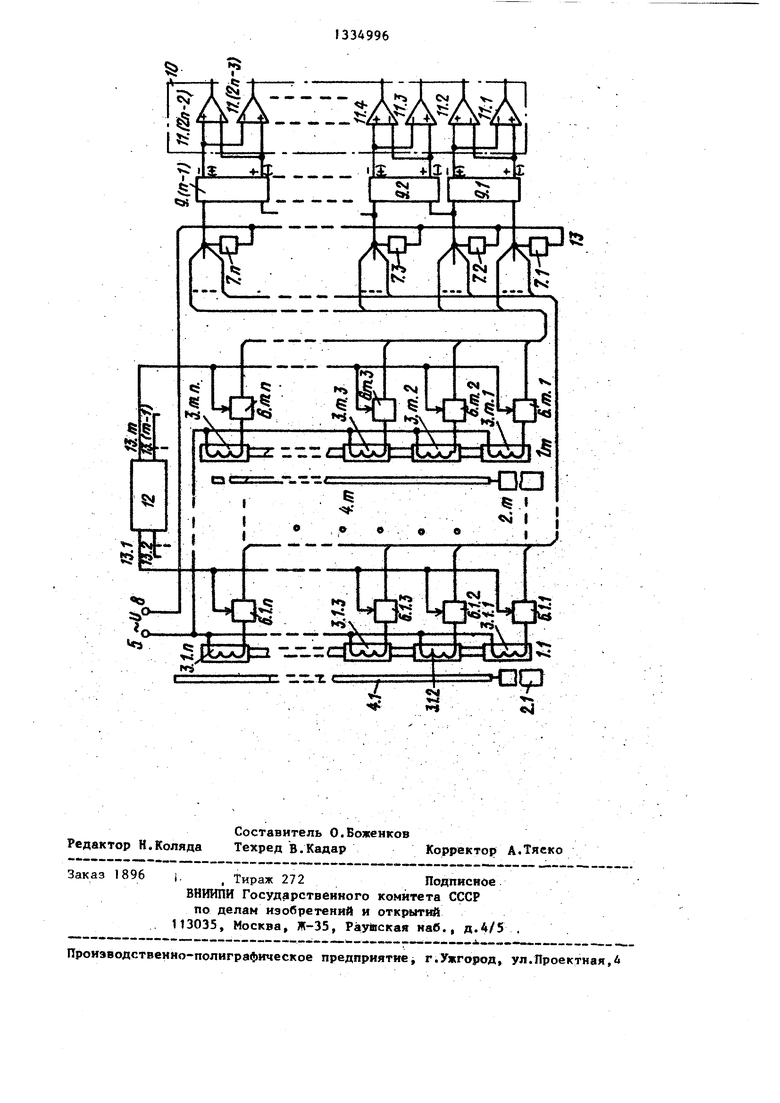
Изобретение поясняется чертежом, где представлена структурная схема системы.
Система контроля положения органов регулирования ядерного реактора содержит m линейных датчиков положения 1.1-1.т, органов регулирования 2.1-2.т. Каждый датчик положения состоит из п однообмоточных индуктивных катуиек З.К,1-З.К.п (К 1j 2,... ,га) . Катуяки размещены вдоль траектории двияжния органа регулировния .Вдоль каждого линейного датчика положения перемещается магнитный шунт соответственно 4.1-4„и, жестко связанный с органом регулирования 2. Один иэ выводов каждой из катушек линейных датчиков положения 1 подключен к первой клемме 5 переменного питающего напряжения. Другой вывод индуктивных катушек подкjameK к входам управляемых ключей 6.К.1-6.К.п (К 1, 25...,га).
Выходы управляемых ключей, под- ключгшедих одинаково.распологепмые на соотйетствующей высоте индуктивные катушки (3,1.1-3,ш, t). ..О.1.П- З.га.п) объединены и подклк чены череэ стабилизаторы тока 7.1-7,п к второй клемме 8 переменного п тающего напряжения и к входам схем сравнения двух напряжений 9.1-9()9 выходы которых соединены с входами схемы по обработке сигналов поло кения 10, содержащего, например, диффереяциальиш ся в основном допустимой плотиость
усилители-корректоры 11,1-11(2п-2).
Система контроля положения содержит также коммутатор 12, вырабйшва- юздий поочередно на выходах 13,1.. 13(ffl-t) сигналы на эагвакание уярав- ляемых ключей (6.1.1-6. ), Дб.й. 1 б.га.п) соответствуящих линейных датчиков положейия 1.1....
Система контроля положения оргаИов
Тока, протекающего по катушке, и магиитнг и свойствами материала маг- йитопровода катушки 3 и шунта 4, При движении органа регулирования . 2, а с ним и магнитного шуйта 4. вверх и® крайнего мижиего положения, магнитный шунт 4 будет последователь но satSiiK&fb магнитные цепи катуоек 3.1.2, 3.1.3,., ,3.1.П, г1рИ этом
регулирования работает следуквярш об- .g также последовательно будет появлять
разом.
Подключение какого-либо линейного датчика положения 1.1... 1 .ia оргако в, регулирования к стабилизаторам тока
ся сигнал разбапансировки (положения) на эыходах схем сравнения двух напряжений 9«2, 9.3,...,9.(п-1) той же полярности, что и Оьш на выходе
7 и схемам сравнения двух напряжений 9 осуществляется отпиранием соответствующей этому датчику группы управляемых ключей 6 сигналом, поступающим с коммутатора. 12. Режим работы коммутатора может выбран либо непрерывным с частотой, необходимой для обработки сигналов поло- жения |и индикации местоположения . органов регулирования на индивидуальных табло, либр индивидуальным - для опроса местоположения конкретного органа регулирования ядерного реактора.
Пусть к схемам сравнения двух напряжений подключен. Например, первый линейный датчик положения .1.1. В исходном крайнем Нижнем положении ор- гана регулирования 2.1 и магнитного аунта 4.1 мосты, образованные парами смежных катушек (3.1.2-3.1.3), (3.1.3-3.1.4)..,(3.1.п-1 -3.1.л) и,соответственно, элементами схем сравнения двух напряжений 9.2-9.(п-1) сбалансированы (на выходах сигнал положения отсутствует)р так как на- пряжения, снимаемые с катушек, рав- н№ ,Ност, образованн катушками 3 1.1 И 3,1.2 И элемента схенысрав- иения 9.1, радбалансйрован. Напряжение на катушке 3.1.1 больше, чем «а кадушке 3.1.2, так как шунтом замкнута магнитная цепь катушки 3.1«1; На выходе сравнения 9.1 образуется сигнал положения ооределен- ной полярности (укаэаяндй иа чертежа без скобок). Величина этого сигнала -пропорциональна току, протекаи- щему катушку линейного датчика, и тому измеиен йядукт1шного сопротивления катушки, которое выэы-. вается введение ; магнятйого 4.1 в зону квтушки и ограничиваетТока, протекающего по катушке, и магиитнг и свойствами материала маг- йитопровода катушки 3 и шунта 4, При движении органа регулирования . 2, а с ним и магнитного шуйта 4. вверх и® крайнего мижиего положения, магнитный шунт 4 будет последовательно satSiiK&fb магнитные цепи катуоек 3.1.2, 3.1.3,., ,3.1.П, г1рИ этом
также последовательно будет появлять
ся сигнал разбапансировки (положения) на эыходах схем сравнения двух напряжений 9«2, 9.3,...,9.(п-1) той же полярности, что и Оьш на выходе
схемы сравнения 9.1 при исходном положении органа регулирования 2.1. Одновременно с этим будет исчезать сигнал разбалансировкй (положения) предыдущего моста и схемы сравнения Сигнал раэбалансировки будет лишь только.на выходе той схемы сравнеиия 9, которая подключена к мосту, где магнитным юунтом А замыкается маг- нитйая цепь одной из катуоек моста. При дальнейшем движении органа регулирования 2.1 с магнитным шунтом А в верхнее крайнее положение магнит- ныК шуит А будет последовательно размыкать магнитные цепи катушек (выходить из зоиы катушек) 3.1.t, 3.1.2,..,3.t.n. При этом последовательно будет появляться сигнал раз- балаиси|М вки мостов иа выходе той схемы сравнения 9 которая вхоДит в мост, где шуит выходит из зоны одной из катушек. Сигнал разбалаи- сировки Иа выходе схемы сравнения двух напряжений 9 будет иметь про- тивоположиую полярность (указана иа чертеже в скобках) по срлвИеиию с теми случаями, когда шуит входит в зону катушек. На выходах каждой схе- мы сравнения сигнал полояюиия появляется дважды в завис1мосш от по- Аожеиия магнитного шуита (вжодап 4|Ж в катушку или выходит из иее), ир противтгаШожной поляриости Каждая схема сравнения двух иалряжеиий 9, таким образом, определяет два положения (две зоны) органа регутфовммя, поэтому нагружена ояа ИА два-диф|фе- . ренциальных усилителя-ко| рек П р1ё 11,, разлИчаияцю сигиа по поляриосТй на выходах KOTOIKA и появляются сигнал положения органа. 1 егулироваийя 2
По
: жеиий соедииеиы с выходами стабипиз ; торов Тока смежиых rpynii индуктив; иык к«тушек, а выходы - с входами
сравнению с известиыми (а-, ми контроля Положения, в 1срфо рых схемы по 6браб6тк(е сигналов положё- йал снимаемся с добаЕ(рч1а1х скнфоТив- иия.:
лeнIdt,включенных последовательно в ,:. цепях индуктивных катушек, изобретение позволяет увеличить уровень сигналов положения, снимаемых йепосред ственно с индуктивных катушек датчика. Это повышает надежность контроля положения органов регулирования ядерного реакторе.
Формула изобретения
Система контроля положения органо регулирования ядерного реакторе, со15 держакая лииейные датчики положения
с иидуктивнм4И катушками и магнитны- ми шунтами, жестко связанными с органами регулироваиия, управляемые клю чи, управлякщие входы которых в каж20 дом и лииейиых датчиков положения объединены и соеднкеиы с соответствующим выход(М« коммутатора, вход каждого ключа соедииеи с первым выводом соответствующей иидуктивной катуш-
2S ки, вторые выводи которых объединены и соедииеям-е первой клеммой питающего напряжения, сжему по обработке сигиалов пбложеиия, отличающаяся тем, что, с целью повыюеЭО иия надежности коитроля положения оргаиов регуяи{юв«ишя путем увеличе/ имя уровней сигиаяов, сиимаеквлс с .юздухтшвиых катушек, в иее введены схемы сравиеиия двух-напряжений и
стабшлязаторы тока, включенные между
второй клеммой питающего напряжения
и точкой соедииеиия вшрюдов управля,емых ключей групп иидуятивных катушек, соответствующих одинаковому по45 ложеиию оргаиов регул1фования, причем входы схем сравиеиия двух напря-
: жеиий соедииеиы с выходами стабипиза- ; торов Тока смежиых rpynii индуктив; иык к«тушек, а выходы - с входами
1 схемы по 6браб6тк(е сигналов положё- иия.: 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля положения органа регулирования ядерного реактора | 1990 |
|
SU1806410A3 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ ЯДЕРНОГО РЕАКТОРА | 2006 |
|
RU2310247C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ ЯДЕРНОГО РЕАКТОРА | 2005 |
|
RU2310244C2 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2038571C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| ДАТЧИК ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2174719C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2008 |
|
RU2394290C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2273896C1 |
| СИСТЕМА РАСПРЕДЕЛЕНИЯ РЕАКТИВНЫХ НАГРУЗОК | 2003 |
|
RU2319131C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2001 |
|
RU2208846C2 |
Изобретение относится к области ядерной энергетики, а именно к системам контроля положения органа регулирования ядерного реактора. Цель изобретения - повышение надежности контроля положения органов регулирования путем увеличения уровней сигналов, снимаемых с индуктивных катушек. Система контроля положения органов регулирования ядерного реактора содержит линейные датчики положения с индуктивными катушками и магнитными шунтами, жестко связанными с органами регулирования. Наличие в системе коммутатора и управляемых ключей обеспечивает подключение к схеме по обработке сигналов требуемого линейного датчика положения. Введение в систему стабилизаторов тока, включенных в цепи питания ин- дуктивны с KatymeK, и схен сравнения двух напряжений, на которые нагружены смеятые индуктивные катушки, позволяет увеличить сигнал, снимаемый с индуктивных катушек, и тем самым повысить надежность контроля положения органов регулиров ания. 1 ил. ш со СА) 4; со со Од
| Патент ФРГ № , кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США Р 4371496, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
