Изобретение относится к устройствам ядерной техники и может быть использовано в приводах регулирующих органов систем управления и защиты ядерных реакторов для контроля за положением и перемещением регулирующих органов.
Известен механизм управления ядерного реактора с датчиком пошагового контроля положения органа регулирования (патент Р.Ф. 2073917, 1994 г.), который содержит жестко соединенный с органом регулирования шток, шунт и приводное устройство, расположенное внутри герметичного корпуса, заполненного водой первого контура, индикаторы положения шунта и обмотки электромагнитов приводного устройства, расположенные снаружи герметичного корпуса, причем герметичный корпус выполнен в виде двух концентричных, соединенных в верхней части труб, соосно с которыми расположен шунт, охватывающий малую трубу, шунт установлен на верхнем конце штока, а индикаторы положения шунта размещены внутри малой трубы в зоне приводного устройства равномерно вдоль оси перемещения штока и разделены немагнитными проставками, а шунт выполнен из магнитных и немагнитных проставок общей длиной, равной рабочему ходу штока, при этом каждому шагу приводного устройства соответствует одна и только одна основная кодовая комбинация положения органа регулирования, снимаемая одновременно со всех индикаторов положения шунта, получающаяся при замыкании или размыкании магнитными и немагнитными проставками шунта магнитных цепей индикаторов положения, причем длины магнитных и немагнитных проставок шунта подобраны так, что при нахождении органа регулирования между i и i+1 шагами приводного устройства промежуточные кодовые комбинации, получающиеся при этом, могут быть отнесены только либо к i, либо к i+1 шагам положения органа регулирования.
Задачей изобретения является повышение точности определения положения и перемещения органа регулирования, упрощения конструкции и повышение надежности работы механизма управления ядерного реактора.
Поставленная задача решается за счет того, что в механизме управления ядерного реактора с датчиком пошагового контроля положения органа регулирования, содержащем жестко соединенный с органом регулирования шток, шунт и приводное устройство, расположенное внутри герметичного корпуса, заполненного водой первого контура, индикаторы положения шунта и обмотки электромагнитов приводного устройства, расположенные снаружи герметичного корпуса, причем герметичный корпус выполнен в виде двух концентричных соединенных в верхней части труб, соосно с которыми расположен шунт, охватывающий малую трубу, шунт установлен на верхнем конце штока, а индикаторы положения шунта размешены внутри малой трубы в зоне приводного устройства вдоль оси перемещения штока и выполнены в виде двух одинаковых катушек с магнитопроводами и двумя обмотками, установленными вплотную друг к другу. Плоскости витков обмоток расположены в направлении перемещения шунта и таким образом силовые линии, охватывающие витки обмоток, замкнуты в плоскостях, перпендикулярных направлению перемещения шунта. Длина одной катушки с магнитопроводом выбрана из соотношения
где lk - длина катушки,
Sп.p.x - величина полного рабочего хода штока.
Длина шунта (lш) равна удвоенной длине одной катушки с магнитопроводом (lш= 2lк), причем на первичные обмотки индикаторов подают напряжение питания переменным током, а со вторичных обмоток снимают напряжение сигнала о положении шунта или, что то же самое, штока, при этом каждому шагу приводного устройства и соответственно, положению штока соответствует только одна кодовая комбинация соотношения напряжений со вторичных обмоток и абсолютных значений этих напряжений.
Сущность изобретения поясняется чертежами.
На фиг.1 изображен предлагаемый механизм управления ядерного реактора с датчиком пошагового контроля положения органа регулирования;
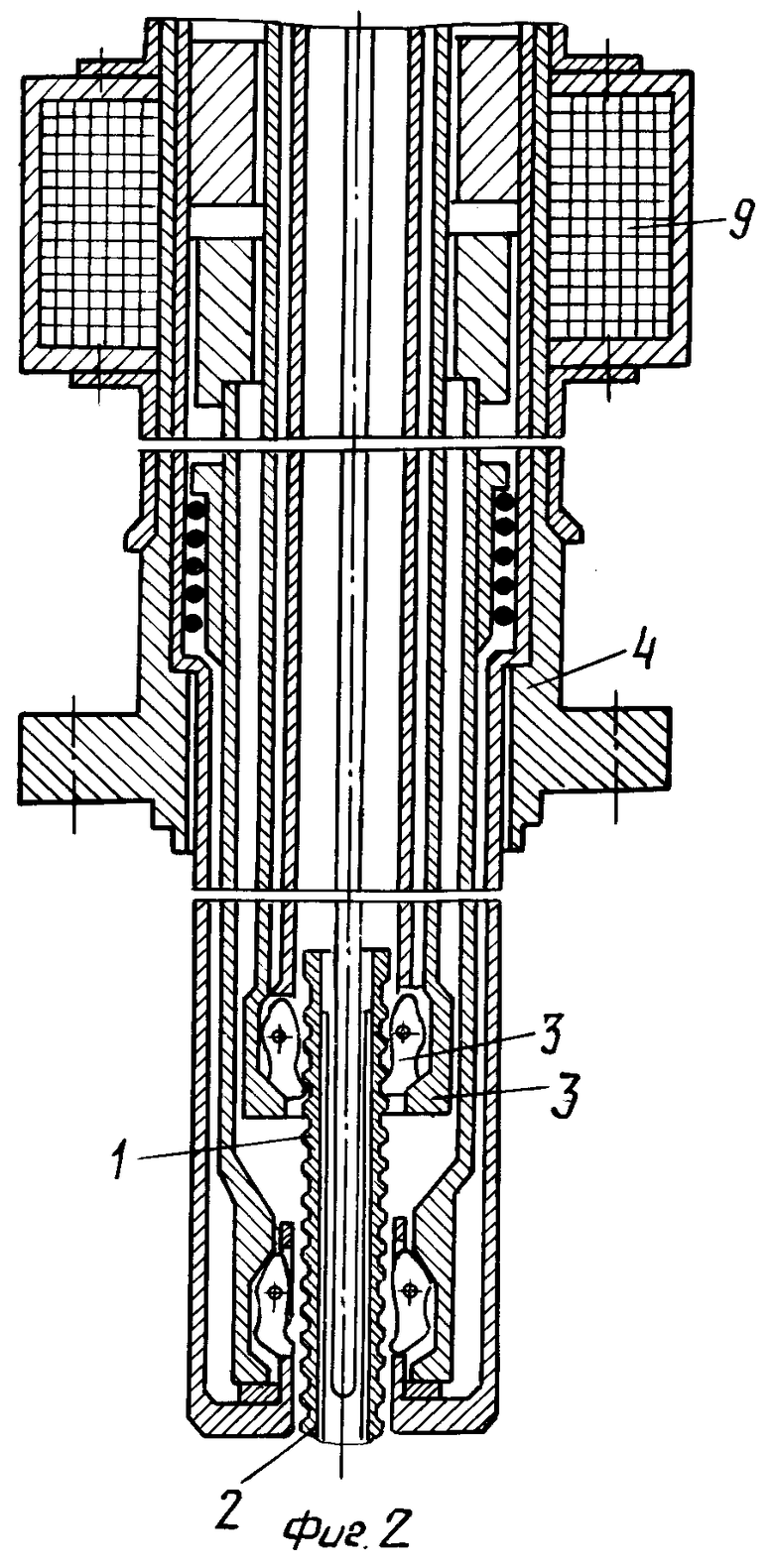
на фиг.2 - продолжение фиг.1;
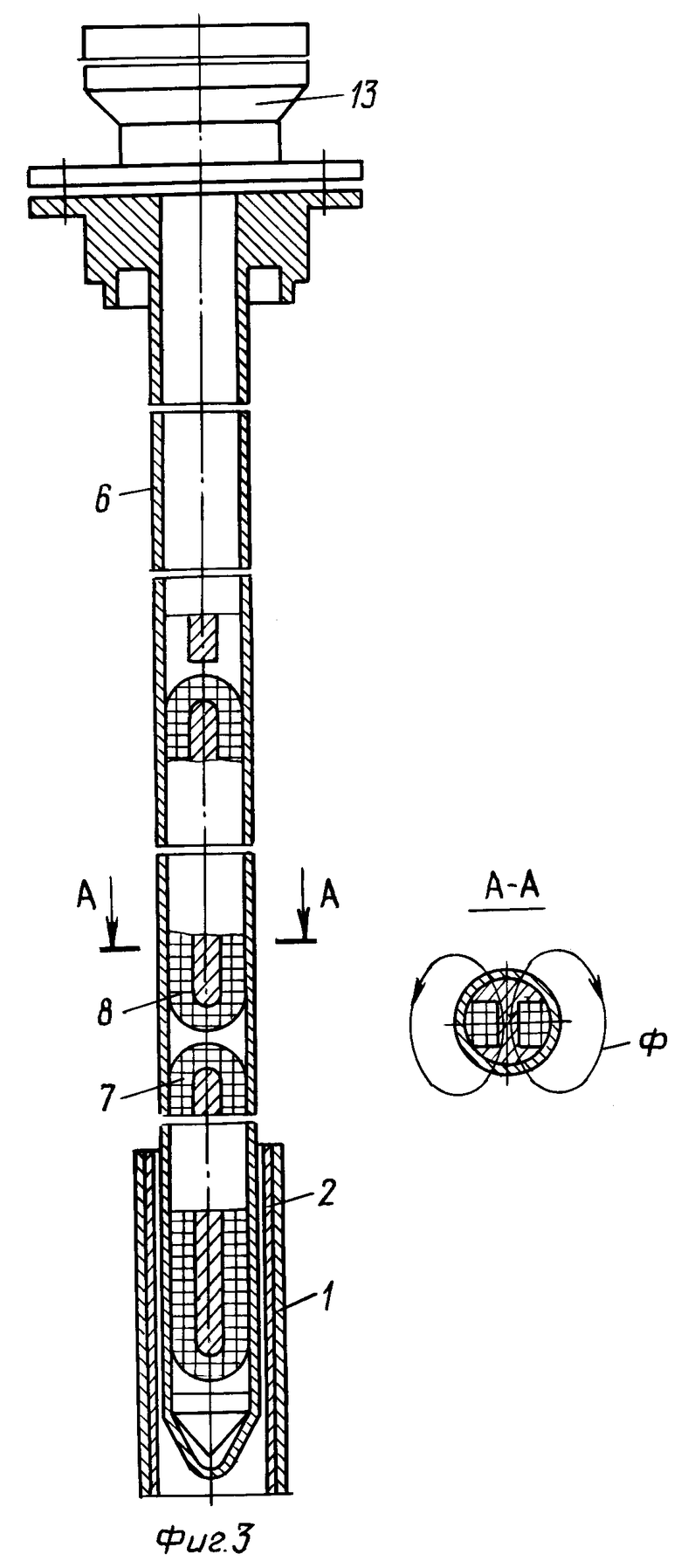
на фиг.3 изображен датчик контроля положения органа регулирования с индикатором положения шунта;
на фиг.4 изображена зависимость выходных напряжений катушек от положения и перемещения шунта в усеченном виде;
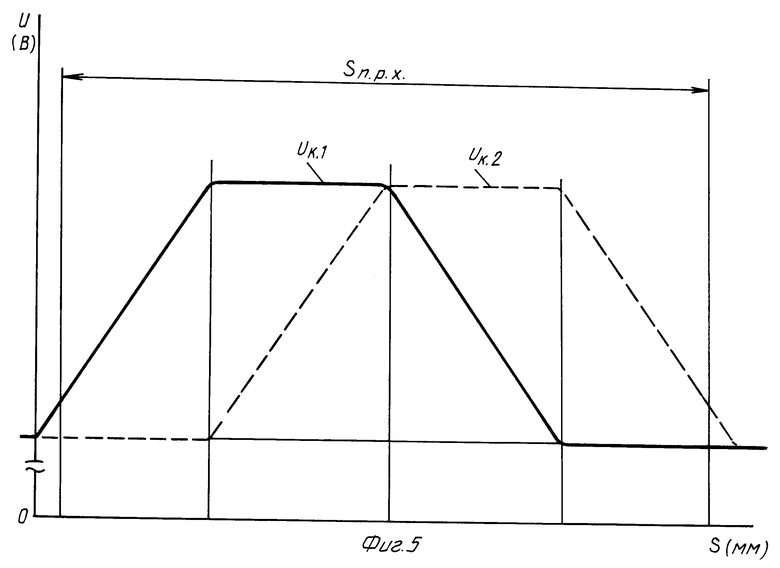
на фиг.5 изображена зависимость выходных напряжений катушек от положения и перемещения шунта в полном виде.
Механизм управления ядерного реактора содержит жестко соединенный с органом регулирования шток 1, шунт 2, приводное устройство 3, герметичный корпус 4, выполненный в виде двух концентричных труб 5 и 6, индикаторы 7 и 8 положения шунта 2. Обмотки 9, 10, и 11 электромагнитов приводного устройства 3, датчик 12 контроля положения органа регулирования с соединителем 13, к контактам которого подсоединены выводы обмоток индикаторов 7 и 8.
Механизм управления ядерного реактора работает следующим образом.
В исходном состоянии механизм находится в вертикальном положении, обмотки 9, 10 и 11 электромагнитов приводного устройства обесточены и шток 1 с шунтом 2 находятся в крайнем нижнем положении, при этом верхний конец шунта 2 перекрывает незначительную часть индикатора 7. Включается питание на первичные обмотки индикаторов 7 и 8. На вторичных обмотках индикаторов 7 и 8 появляются напряжения Vк1 и Vк2, причем Vк1 несколько больше Vк2 за счет перекрытия шунтом 2 части индикатора 7. При наличии переменных токов в первичных обмотках индикаторов 7 и 8 вокруг обмоток возникают магнитные потоки Ф. При отсутствии шунта сопротивление для магнитных потоков велико и магнитные потоки значительно меньше, чем при наличии шунта (см. фиг.3 сечение А-А). Включается питание обмоток 9, 10 и 11 электромагнитов приводного устройства 3 в определенной последовательности, и шток 1 с шунтом 2 шагами поднимается вверх, надвигаясь на индикаторы 7 и 8. По мере перекрытия шунтом 2 индикаторов 7 и 8 сопротивление для магнитных потоков уменьшается и значения магнитных потоков возрастают, вследствие этого возрастают и выходные напряжения Vк1 и Vк2 на вторичных обмотках индикаторов 7 и 8. Причем сначала растет напряжение Vк1, а Vк2 остается постоянным до положения, при котором шунт 2 полностью перекроет индикатор 7 (на фиг.4 изображена зависимость выходных напряжений Vк1 и Vк2 от перемещения шунта 2, труба 6 на фиг.4 не изображена). Когда шунт 2 начнет перекрывать индикатор 8, начнет увеличиваться напряжение Vк2, а Vк1 после этого будет сохраняться неизменным до положения, при котором шунт перекроет оба индикатора 7 и 8. При дальнейшем перемещении шунта 2 нижний торец шунта начнет сходить с индикатора 7, т.к. длина шунта 2 выбрана равной удвоенной длине индикатора (lш=2lk), и напряжение Vк1 начнет уменьшаться, а Vк2 будет оставаться неизменным до положения, при котором шунт 2 будет полностью перекрывать только индикатор 8. При дальнейшем перемещении шунта 2 вверх нижний торец шунта начнет сходить с индикатора 8 и напряжение Vк2 начнет уменьшаться, а напряжение Vк1 с этого момента будет оставаться неизменным до положения шунта, при котором нижний торец шунта 2 полностью сойдет с индикатора 8, и напряжение Vк1 станет равным напряжению Vк2. Из зависимости напряжений Vк1, Vк2, приведенной на фиг.5, видно, что имеется два положения шунта 2, которым соответствует одна и та же комбинация соотношения напряжений Vк1 и Vк2 и абсолютных значений этих напряжений - это положение шунта 2 ниже индикатора 7 и положение шунта 2 выше индикатора 8. На остальном ходе шунта 2 между этими положениями каждому положению шунта 2 соответствует только одна кодовая комбинация соотношения напряжений Vк1, Vк2 и по кодовой комбинации однозначно определяется положение и перемещение шунта 2. Поэтому полный контролируемый рабочий ход штока (или шунта) должен располагаться на участке, отмеченном на фиг.5 размерной линией Sп.р.х, т.е. в нижнем положении шунта в начале рабочего хода штока 1 напряжение Vк1 несколько больше Vк2, а в верхнем положении шунта в конце рабочего хода Vк2 несколько больше Vк1. Это достигается перемещением индикаторов 7 и 8 внутри трубы 6 вдоль ее оси. Зависимость выходных напряжений Vк1, Vк2 от перемещения шунта 2 состоит из прямолинейных участков, и высокая точность определения положения шунта 2 обеспечивается непрерывно в любом положении шунта 2. Для поддержания высокой точности определения положения шунта обмотки индикаторов наматываются проводом с малым температурным коэффициентом и применяется стабилизация тока питания первичных обмоток. Шунт в предлагаемом механизме выполнен из сплошной трубы из магнитного материала, что значительно проще по конструкции и надежнее в работе.
Предлагаемый механизм обеспечивает повышенную точность определения положения и перемещения органа регулирования, упрощение конструкции и повышение надежности работы. Механизм обеспечивает контроль перемещения штока при выполнении каждого шага, что особенно важно при проведении диагностики состояния механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОЛОЖЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2163401C2 |
| ДАТЧИК ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2174719C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 2008 |
|
RU2394290C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| СПОСОБ ШАГОВОГО КОНТРОЛЯ ОРГАНА РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 2007 |
|
RU2353989C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2157007C1 |
| БЛОК ЭЛЕКТРОМАГНИТОВ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2177181C2 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2014 |
|
RU2563967C1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1981 |
|
SU1061626A1 |

Изобретение относится к устройствам ядерной техники и может быть использовано в приводах регулирующих органов систем управления и защиты ядерных реакторов для контроля за положением и перемещением регулирующих органов. Предлагаемый механизм обеспечивает повышенную точность определения положения и перемещения органа регулирования, упрощение конструкции и повышение надежности работы, а также обеспечивает контроль перемещения штока при выполнении каждого шага, что особенно важно при проведении диагностики состояния механизма. В механизме управления индикаторы положения шунта выполнены в виде двух одинаковых катушек с магнитопроводами и двумя обмотками, установленными вплотную друг к другу, причем плоскости витков обмоток расположены в направлении перемещения шунта. Длина одной катушки с магнитопроводом равна или больше одной четверти величины полного рабочего хода штока, а длина шунта равна удвоенной длине катушки с магнитопроводом. 5 ил.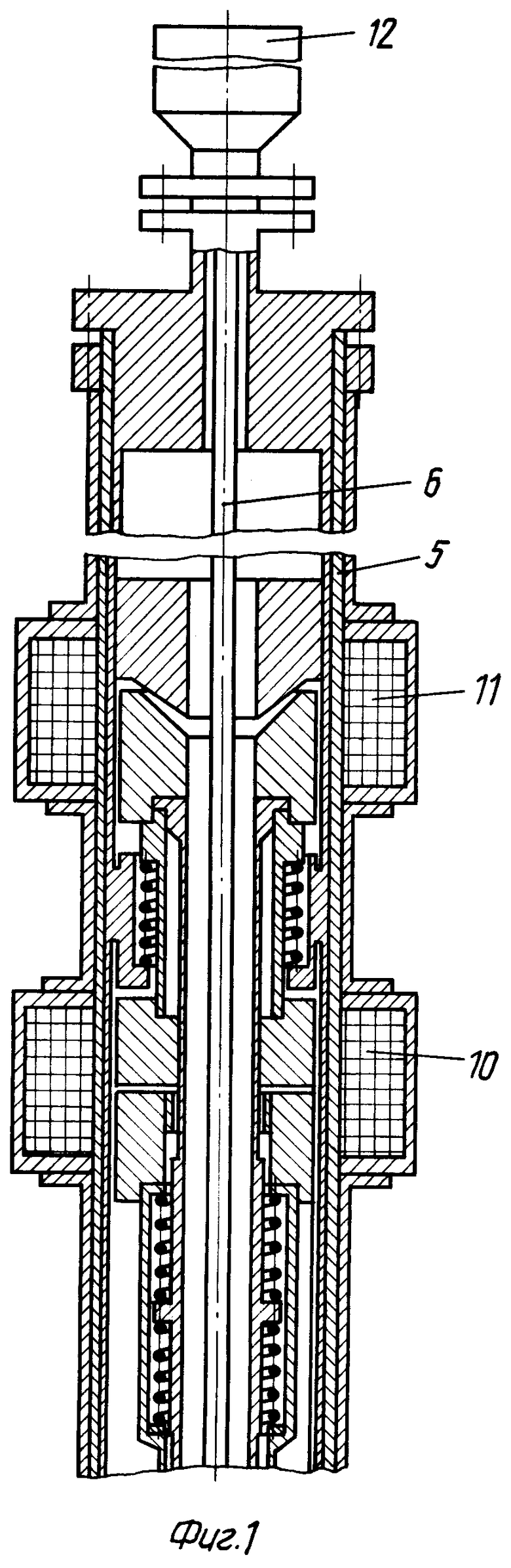
Механизм управления ядерного реактора с датчиком пошагового контроля положения органа регулирования, содержащий жестко соединенный с органом регулирования шток, шунт и приводное устройство, расположенное внутри герметичного корпуса, заполненного водой первого контура, индикаторы положения шунта и обмотки электромагнитов приводного устройства, расположенные снаружи герметичного корпуса, выполненного в виде двух концентричных соединенных в верхней части труб, соосно с которыми расположен шунт, охватывающий малую трубу, шунт установлен на верхнем конце штока, а индикаторы положения шунта размещены внутри малой трубы в зоне приводного устройства вдоль оси перемещения штока, отличающийся тем, что индикаторы положения шунта выполнены в виде двух одинаковых катушек с магнитопроводами и двумя обмотками, установленными вплотную друг к другу, плоскости витков обмоток расположены в направлении перемещения шунта и таким образом магнитные силовые линии, охватывающие витки обмоток, замкнуты в плоскостях, перпендикулярных направлению перемещения шунта, причем длина одной катушки с магнитопроводом выбрана из соотношения
где lк - длина катушки;
Sn.p.x.- величина полного рабочего хода штока,
а длина шунта равна удвоенной длине катушки с магнитопроводом, причем на первичные обмотки индикаторов подают напряжение питания переменным током, а со вторичных обмоток снимают напряжение сигнала о положении шунта или, что то же самое, штока, при этом каждому шагу приводного устройства и, соответственно, положению штока соответствует только одна кодовая комбинация соотношения напряжений со вторичных обмоток и абсолютных значений этих напряжений.
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА С ДАТЧИКОМ ПОШАГОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ | 1994 |
|
RU2073917C1 |
| ДАТЧИК ПОЛОЖЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2163401C2 |
| US 5563922 А, 08.10.1996 | |||
| US 4014741 А, 29.03.1977 | |||
| 6-Метилурацил-5-аммоний-сульфат в качестве исходного соединения для синтеза оксипроизводных 6-метилурацила | 1991 |
|
RU2000298C1 |

