Изобретение относится к способам автоматизации горно-добывающих работ а именно к способам автоматического управления т полнительным органом горной машины, и является усовершенствованием известного способа по авт св. № 1086156.
Цель изобретения - повышение производительности путем адаптации системы управления к разрушаемости угольного пдаста и выбора соответствующего режима работы гидромонитора, а также получение заданного контура отрабатываемого массива угля без значительных выходов за его пределы во всех контрольных положениях.
Это достигаемся тем, что при автоматическом -управлении гидромонитором согласно известному способу . во всех контрольных положениях (подциклах) заданное время Zr разбивают на интервалы д-сГ 5 за период каждого из которых обеспечивае тся сканирование струей груди забоя не менее одного раза, и в которое производят многократное (не менее 20) измерение глубины выемки. При этом определяют отношение
числа замеров N
()
, показавших достигнутую глубину L, с числом всех замеров N в интервале д и , а по значеотнон1ения X
N
(t)
N
выделяют четыре режима работы гидромонитора: 1 „ х X, (например,
X
25 органа, обрабатывающего массива угл 10, датчик 11 горизонтального перем щения рабочего органа, датчик 12 вертикального перемещения рабочего органа, датчик 13 скорости горизонтального перемещения, датчик 14 ско рости вертикального перемещения, дал номер 15, корректирующий фильтр 16, элемент 17 сравнения, избиратель 18 режима.
U , 5 - 1 1 э I
О,,8-1) - переводят гидромонитор
35
( S
В следующее контрольное положение;
2,51 й 2 ; , O iX x, - продолжают отбойку в том же контрольном положении без изменения параметров гид- ромонкторной струи; . 3
,
Программное устройство 2 содержи блок 19 считывания информации, пост янное запоминающее устройство (ПЗУ 20, блок 21 дешифраторов, блок 22 р гистров. Электрогидропривод 9 рабочего органа содержит ствол 23-, гидр цилиндр 24 горизонтального перемещ
X 0,4-0,6) -повторяют отбойку в том же контрольном положении без изменения параметров гидромониторной струИ; но с заданием времени , /2
4, S 5 , - интенси- фицир тот отбойку в том же контрольном положении при том же времени ,, изменяя динамическую характеристику струи,,
Режим 1 имеет приоритет прерывания другизс режимов, а при повторном получении режимов 3 и 4 производят аварийный останов гидромонитора.
Такое дополнение известного способа автоматического управления гидромонитором позволяет сделать,процесс
X, (например, ния, гидроцилиндр 25 вертикального
45
перемещения, электрогидрораспредели тели 26 и 27, гидродроссели 28 и 29 с электрическим управлением, регуля тор 30 давления, гидрораспределитель 31,
Дополнительно в устройство введе 50 делитель 32 времени отработки подци ла и анализатор 33 эффективности о бойки.
Способ автоматического управлени гидромонитором с помощью предлагаем 55 го устройства осуществляют следующи образом.
Запись программы в ПЗУ производи ся заранее с помощью специального программатора на поверхности шахты.
управления адаптивным, более гибко варьировать режимами работы и получать контур обрабатываемого массива угля, близкий к заданному.
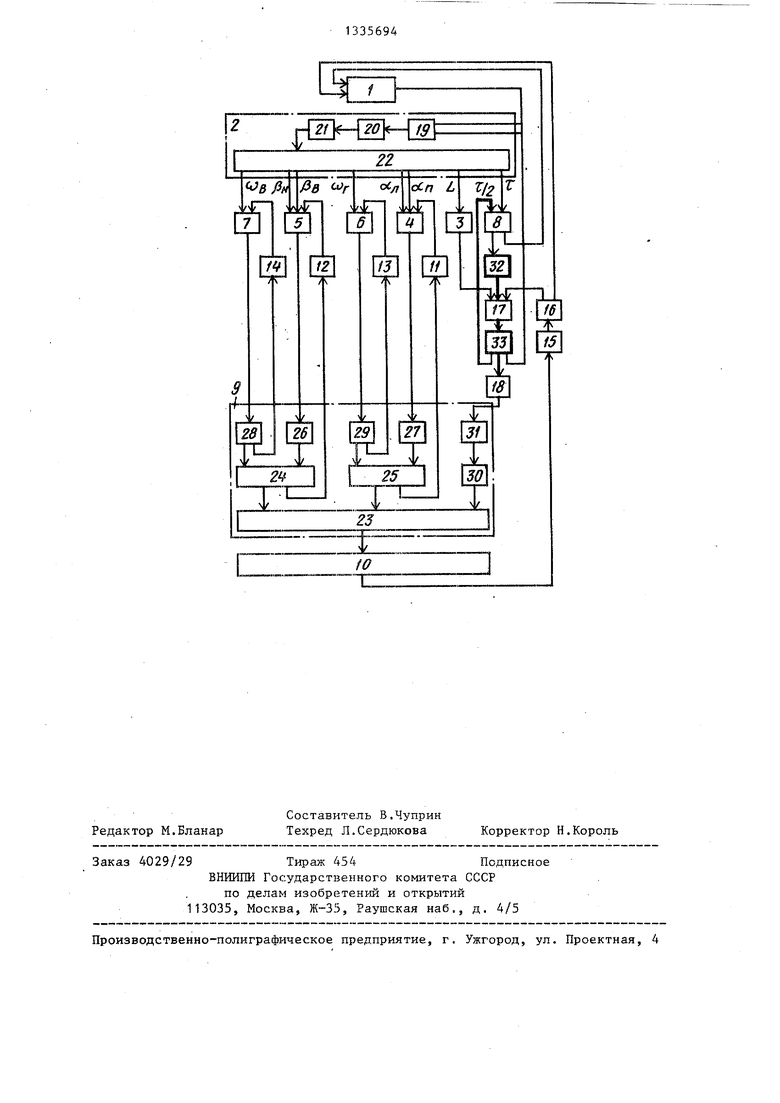
На чертеже представлена структурная схема устройства автоматического управления гидромонитором, реализующего предлагаемый способ.
Устройство автоматического управления гидромонитором содержит пульт 1 управления с информационным табло, с с которого подается команда на считывание информации первого подцикла
g программы обработки забоя, хранящейся в программном устройстве 2, задатчик 3 глубины отбойки, блок 4 управления горизонтальным качанием ствола, блок 5 управления вертикальным качанием
Q ствола, блок 6 управления скоростью горизонтального качания, блок 7 управления скоростью вертикального качания, реле 8 времени отработки цикла, электрогидропривод 9 рабочего
5 органа, обрабатывающего массива угля 10, датчик 11 горизонтального перемещения рабочего органа, датчик 12 вертикального перемещения рабочего органа, датчик 13 скорости горизонтального перемещения, датчик 14 скорости вертикального перемещения, дальномер 15, корректирующий фильтр 16, элемент 17 сравнения, избиратель 18 режима.
0
Программное устройство 2 содержит блок 19 считывания информации, посто- . янное запоминающее устройство (ПЗУ) 20, блок 21 дешифраторов, блок 22 регистров. Электрогидропривод 9 рабочего органа содержит ствол 23-, гидроцилиндр 24 горизонтального перемещения, гидроцилиндр 25 вертикального
45
перемещения, электрогидрораспредели- тели 26 и 27, гидродроссели 28 и 29 с электрическим управлением, регулятор 30 давления, гидрораспределитель 31,
Дополнительно в устройство введен делитель 32 времени отработки подцик- а и анализатор 33 эффективности отбойки.
Способ автоматического управления гидромонитором с помощью предлагаемо- го устройства осуществляют следующим образом.
Запись программы в ПЗУ производится заранее с помощью специального программатора на поверхности шахты.
При подаче команды на считывание информация из ПЗУ переносится в выходные регистры программного устройства, сигналами которых для каждого подцикла являются: глубина отбойки L, поступающая в задатчик 3 глубины отбойки; левый о(.д и правый оС„ граничные углы, поступающие в блок 4 управления горизонтальным качанием ствола верхний /igH нижний н граничные углы, поступающие в блок 5 управления вертикальным качанием стволаj скорости со и сОц, поступающие в блоки 6 и 7 соответственно i сигнал с , включающий реле 8 времени отработки цикла.
Под воздействием исполнительных механизмов рабочий орган с помощью электрогидропривода 9 обрабатывает . участок массива угля 10, соответствующий данному подциклу программы.
Рабочий орган, которым является гидромониторная струя, формируемая специальным насадком, установленным на стволе 23, перемещается в вертикальной плоскости гидроцилиндром 24 и в горизонтальной - гидроцилиндром 25, Хоторые включаются электроуправ- ляемыми гидрораспределителями 26 и 27 соответственно, регулирование скорости осуществляется гидродросселями 28 и 29 с электрическим управлением. Положение рабочего органа и скорости его перемещения контролируются соответствующими датчиками 11-14.
Заданное время Ъ отработки под- цикла разбивается на интервалы лС делителем 32. Число замеров N накапливается и анализируется устройством 33 оценки эффективности отбойки, вырабатывающим соответствуняцие управляющие воздействия.
При этом режим 1 имеет приоритет прерывания других режимов, так как фиксирует окончание выемки угля в за- д;анном контрольном положении. Этим достигается адаптация управления за
счет досрочного перевода гидромонито- 50ческой характеристики струи, при этом ра в новое контрольное положение. Прирежим 1 имеет приоритет прерывания повторном получении режимов 3 и 4других режимов, а при повторном полупроизводят аварийный останов гидромо-чении режимов 3 и 4 производят ава- нитора, потому что отбойка не ведетсярийный останов гидромонитора.
0
5
0
5
и не имеет смысла ее продолжение без выяснения причин снижения эффективности.
Делитель 32 и анализатор 33 эффективности отбойки выполняются на базе серийных логических элементов и интегральных счетчиков, соединенных в соответствии с выполняемыми функциями .
Формула изобретения
Способ автоматического управления гидромонитором по авт. св. № 1086156, отличающийся тем, что, с. целью повьшения производительности путем адаптации системы управления к разрушаемости угольного пласта, в каждом подцикле контрольное время разбивают на интервалы utr, за период каждого из которых обеспечивают сканирование струей груди забоя не менее одного раза и в этом же интервале производят многократное измерение глубины выемки, при этом определяют отношение числа замеров N , показавших заданную глубину выемки, к числу всех замеров N и по величине
N
W
отношения X --- вьщеляют четыре режима работы монитора;
1 . ZI Л С ;д С; , X х (например, 0,8-1) переводят гидромонитор
в следующее контрольное положение;
, О X X - продол2. z: - ;
жают выемку в том же контрольном положении без изменения параметров гидромониторной струи-.
з.5:лг
15
t , X, Х i X, (например, 2 0,4-0,6) - повторяют выемку в том же контрольном положении без изменения параметров гидромони- торной струи, но с заданием сокращен- ного времени, например &; /2;
4. 51 ITis ; - повторяют выемку в том же контрольном положении при том же времени 2 ; , интенсифицируя ее путем изменения динамиш
га
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления гидромонитором | 1983 |
|
SU1086156A1 |
| СПОСОБ РАЗРАБОТКИ ПОЛОГИХ И НАКЛОННЫХ УГОЛЬНЫХ ПЛАСТОВ РАЗЛИЧНОЙ КОНФИГУРАЦИИ И ГИПСОМЕТРИИ, ОСЛОЖНЕННЫХ ГОРНО-ГЕОЛОГИЧЕСКИМИ НАРУШЕНИЯМИ | 2009 |
|
RU2391509C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ ГИДРАВЛИЧЕСКИЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 2010 |
|
RU2421614C1 |
| Способ безлюдной разработки выбросоопасных крутых угольных пластов | 1982 |
|
SU1122825A1 |
| Способ контроля состояния забоя в процессе гидравлической выемки горных пород | 1986 |
|
SU1467177A1 |
| Скважинный гидромонитор | 1980 |
|
SU945422A1 |
| САМОХОДНАЯ ГИДРОМОНИТОРНАЯ УСТАНОВКА | 1973 |
|
SU407045A1 |
| Агрегат для гидромониторной выемки угля | 1983 |
|
SU1102977A1 |
| Гидромонитор | 2018 |
|
RU2702442C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ЗАМЕРА РАССТОЯНИЙ ОТ ГИДРОМОНИТОРА ДО ЗАБОЯ | 1970 |
|
SU286915A1 |
Изобретение относится к автоматизации горно-добычных работ и позволяет повысить производительность гидромонитора (ГМ) путем адаптации сис- темы управления им к разрушаемости угольного пласта. В процессе работы ГМ под воздействием исполнительных механизмов рабочий орган с помощью электропривода, обрабатывает участок массива угля, соответствукщий данному подциклу программы. Для этого измеряются текущие значения вертикального и горизонтального перемещений рабочего органа и скорости его вертикального и горизонтального перемещений. Во всех контрольньк положениях (КП) контрольное время разбивают на интервалы ut, за период каждого из которых обеспечивают сканирование гидромониторной струей (ГС) груди забоя не менее одного раза. В этом зке интервале производят многократное измерение глубины выемки. Определяют отношение числа замеров N , показывающих заданную глубину выемки, к числу всех замеров N. По величине отношения х N /N выделяют четыре режима работы ГМ: I - Ц , X i X, - переводят ГМ в следующее КП; II - йТ,-, , О X X , - продолжают выемку Б том же КП без изменения параметров ГС; .III - U С,-д ,, Х, X 5 X, Xj 0,4-0,6) - Повторяют выемку в том же КП без изменения параметров ГС, но с заданием сокращенного времени i/2, IV -Гл, . Xj повторяют выемку в том же КП при том же cj , интенсифицируя ее путем изменения динамической х-ки ГС. Режим имеет приоритет прерывания других режимов, так как фиксирует окончание выемки угля в заданном КП. При повторном получении режимов III и IV производят аварийный режим Ш. 1 ил. f. (Л
Редактор М.Бланар
Составитель В.Чуприн Техред Л.Сердюкова
Заказ 4029/29Тираж 454Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Н.Король
| Способ автоматического управления гидромонитором | 1983 |
|
SU1086156A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
