Известны клещевые захваты для грузов в мешкотаре, включающие в себя парные рычажно-тросовые системы со свободными концами, выполненными в виде гребенок с зубьями, прокалывающими ткань мешка.
В описываемом захвате применен управляемый электромагнитами механизм предварительного образования валика из ткани мешка, обеспечивающий более надежное его защемление.
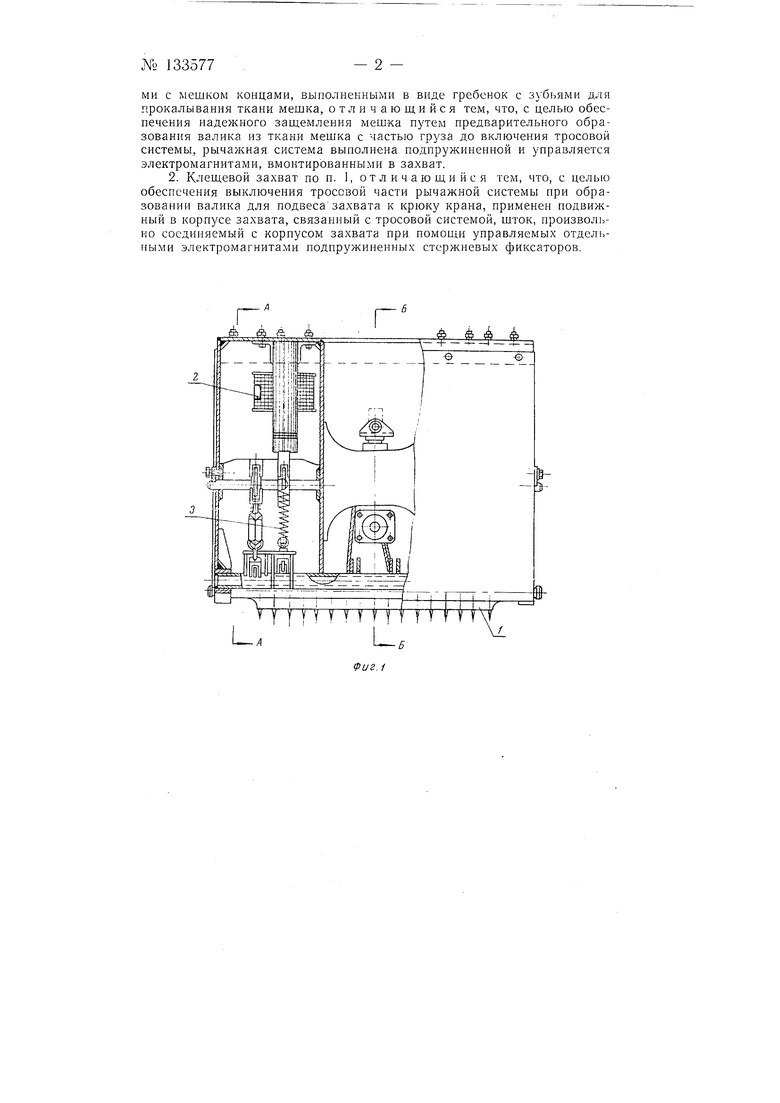
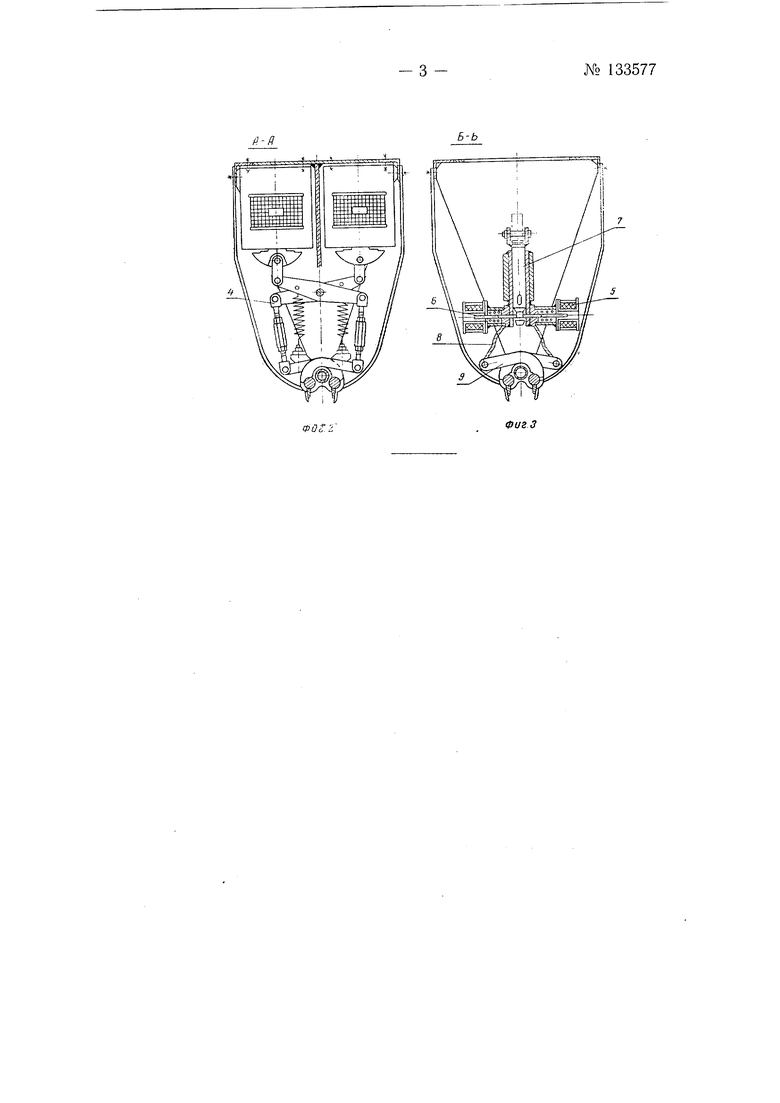
На фиг. 1 изображен захват, вид сбоку, с частично снятым кожухом; на фиг. 2-разрез по А-А на фиг. 1; на фиг. 3-разрез по Б-Б на фиг. 1.
Принцип действия захвата заключается в следующем. Захват с разомкнутыми концами, выполненными в виде гребенок / с зубьями, опускается на мещок. При соприкосновении гребенок 1 с мешком электромагниты 2 отключаются кнопочным выключателем, срабатывают пружины 3 и через рычажную систему 4 смыкаются гребенки 1. При этом ткань мещка подтягивается и образуется валик из ткани мещка с частью груза.
Одновременно с отключением электромагнитов 2 включаются соленоиды 5, втягивающие фиксаторы 6. При подъеме захвата освобожденный от фиксаторов щток 7 натягивает тросы 8 рычажно-тросовой системы 9 и под действием веса поднимаемого груза осуществляется окончательное защемление ткани мешка.
При укладке мешка в штабель повторно включают кнопочный выключатель, который включает электромагниты 2, и гребенки / захвата размыкаются. Одновременно отключаются соленоиды 5 и фиксаторы стопорят шток 7, и освобожденный от груза захват приводится в исходное положение.
Предмет изобретения
1. Клещевой захват для грузов в мешкотаре, включающий в себя парные рычажно-тросовые системы со свободными, взаимодействующими с мешком концами, выполненными в виде гребенок с зубьями для прокалывания ткани мешка, отличающийся тем, что, с целью обеепечения надежного защемления мещка путем предварительного образования валика из ткани мещка с частью груза до включения тросовой системы, рычажная система выполнена подпружиненной и управляется электромагнитами, вмонтированными в захват.
2. Клещевой захват по п. 1, отличающийся тем, что, с целью обеспечения выключения тросовой части рычажной системы при образовании валика для подвеса захвата к крюку крана, применен подвижный в корпусе захвата, связанный с тросовой системой, щток, произвольно соединяемый с корпусом захвата при помощи управляемых отдельными электромагнитами подпружиненных стержневых фиксаторов.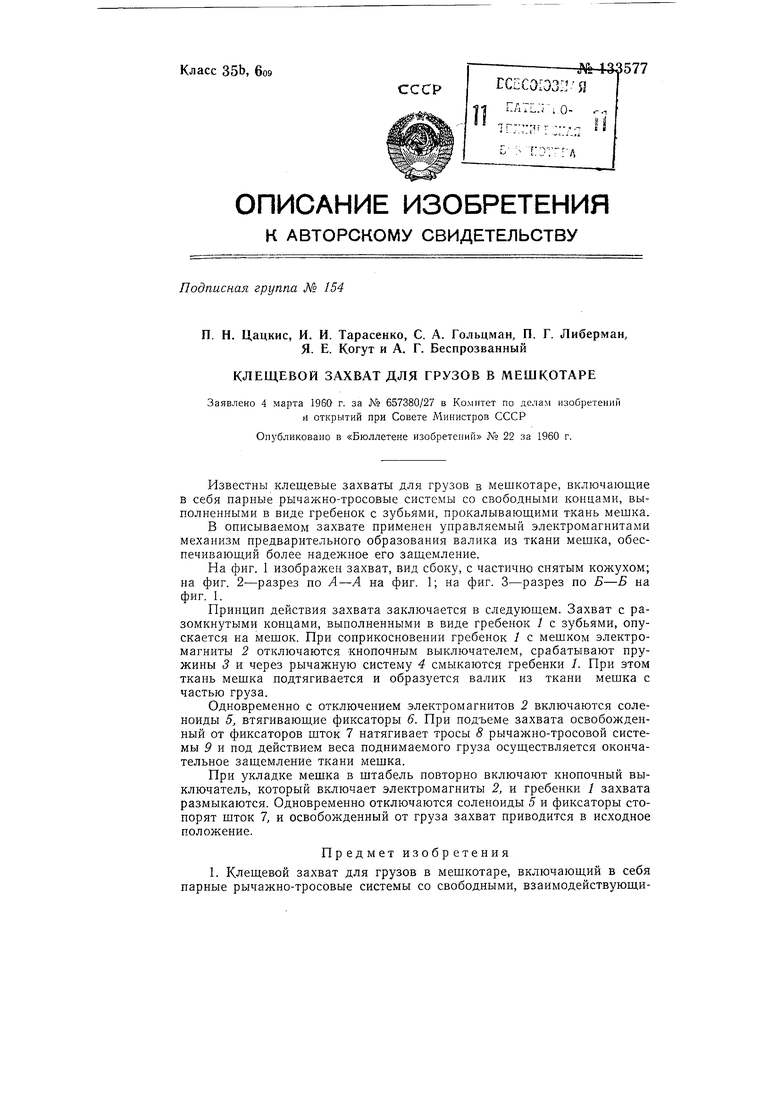
| название | год | авторы | номер документа |
|---|---|---|---|
| Мешкоукладчик | 1960 |
|
SU142200A1 |
| Автомат для изготовления безламельных электродов щелочных аккумуляторов | 1958 |
|
SU121829A1 |
| ЭЛЕКТРИЧЕСКИЕ, МЕХАНИЧЕСКИЕ, ВЫЧИСЛИТЕЛЬНЫЕ И/ИЛИ ДРУГИЕ УСТРОЙСТВА, СФОРМИРОВАННЫЕ ИЗ МАТЕРИАЛОВ С ЧРЕЗВЫЧАЙНО НИЗКИМ СОПРОТИВЛЕНИЕМ | 2012 |
|
RU2612847C2 |
V V У V у V У М
L. I
