нымн пружинами 9 со стойками 8 каретки 3. 11оск() пружины 7 и 9 попарно перпендикулярны друг другу,гайка 5 вместе с винтом 4 может совершать радиальные перемещения без передачи их каретке 3 .Резонансные колебания
1
Изобретение относится к машиностроению, а именно к прецизионным винтовым механизмам и найдет применение, в частности, в буквопечатающих аппаратах, работающих в условиях тряски и вибраций, например на транспортных средствах в движении.
Цель изобретения - снижение динамических перегрузок в узле перемещения каретки буквопечатающего аппарата путем гашения колебаний винтовой пары за счет ее .упругой связи с кареткой и основанием,что позволяет снизить габариты и вес винтового механизма.
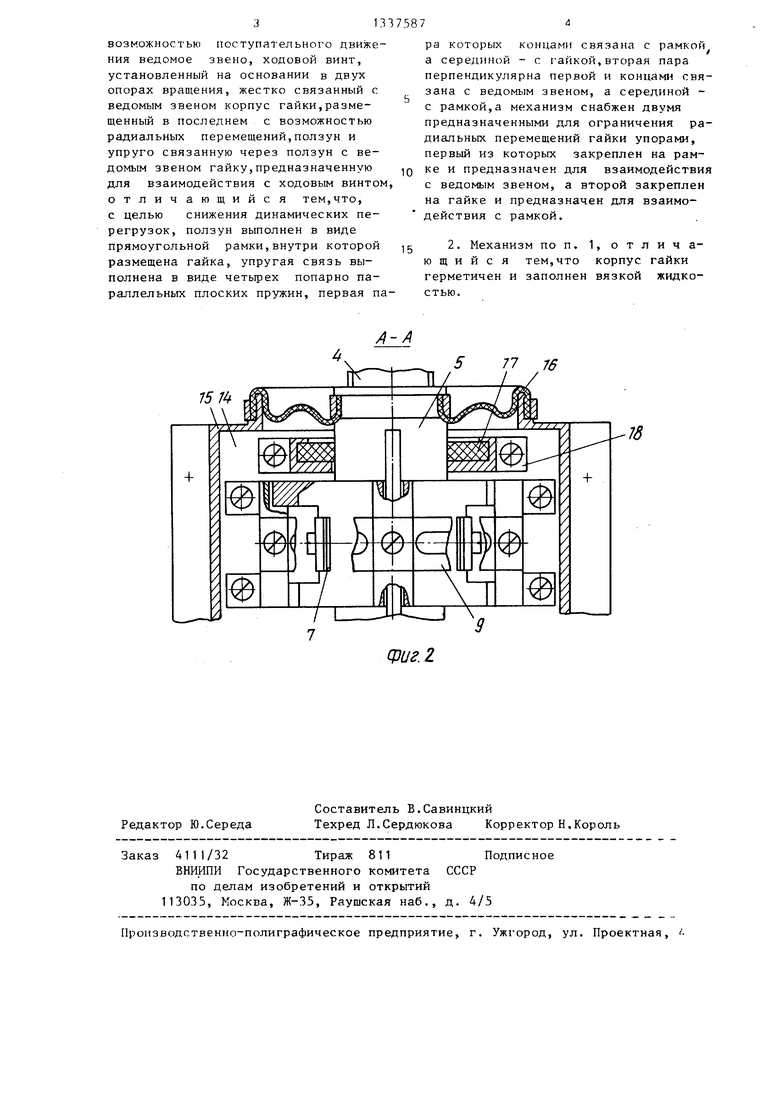
На фиг. 1 показана конструктивная схема предлагаемого механизма;на фиг. 2 - разрез А-А на фиг. 1.
Механизм содержит основание 1 с прямолинейными направляющими 2, размещенное в направляющих 2 с возможностью поступательного дивжения ведомое звено в виде,например, каретки 3 с буквопечатающим устройством,ходовой винт 4, установленный на основании 1 в опорах вращения (не показаны), и взаимодействуюп1ую с винтом 4 гайку 5, Гайка 5 размещена внутри прямоугольной рамки 6 и связана с ней двумя параллельными плоскими пружинами 7. Рамка 6 связана с кареткой 3 через стойки 8 с помощью двух пружин 9, перпендикулярных пружинам 7, Пружины 7 концами связаны с рамкой 6, а серединой - с гайкой 5, пружины 9 концами связаны со стойками 8, а серединой - с рамкой 6.
Для ограничения радиальных перем щений гайки 5 в рамке 6 выполнены диаметральные пазы 10, в которых с некоторым зазором размещены упоры в виде, например, выступов 11, закрепленные на гайке 5. На стойках 8
и высокочастотная вибрация гайки 5 гасятся упругим демпфером и вязкой жидкостью, залитой в полость 14 корпуса 15. Амплитуда колебаний гайки 5 ограничена упорами 11 и 13. 1 з.п. ф-лы, 2 ил.
перпендикулярно пазам 10 выполнены аналогичные пазы 12, в которых также с зазором размещены упоры 13,
; закрепленные на рамке 6.
Гайка 5 и все элементы ее связи с кареткой 3 размещены в герметичной полости 14, образованной корпусом 15. С торцов концы гайки 5 связа10 ны с корпусом 15 диафрагмами 16.
Прогиб ходового винта 4 под воздействием ударных нагрузок и вибраций ограничен упругим демпфером в виде полиуретановой прокладки 17 и жест15 КИМ упором 18, взаимодействующими с гайкой 5.
Для быстрого затухания колебаний гайки 5 в герметичную полость 14 через отверстие 19 заливается вязкая
20 жидкость, например приборное масло.
Механизм работает следующим образом.
При вращении винта 4 поступатель25 нее движение гайки 5 передается каретке 3 без искажений и замедления, так как пружины 7 и 9 имеют больщую жесткость в осевом направлении (вдоль оси винта 4), При радиальных
30 смещениях винта 4 вследствие тряски и вибраций гайка 5 перемещается вместе с ним за счет изгиба пружин 7 и 9, на которых и гасятся эти колебания без передачи их каретке 3.Резонансные колебания и высокочастотная внбраи я винта 4 и гайки 5 гасятся демпфером 17 и вязкой жидкостью, залитой в полость 14. Амплитуда колебаний винта 4 и гайки 5 ограничена упорами 11,13 и 18.
35
40
4Н
Формула изобретения
1. Винтовой механизм, содержащий основание с прямолинейными направляющими, размещенное в направляюргях с
возможностью поступательного движения ведомое звено, ходовой винт, установленный на основании в двух опорах врап1ения, жестко связанный с ведомым звеном корпус гайки,размещенный в последнем с возможностью радиальных перемещений,ползун и упруго связанную через ползун с ведомым звеном гайку,предназначенную для взаимодействия с ходовым винтом отличающийся тем,что, с целью снижения динамических перегрузок, ползун выполнен в виде прямоугольной рамки,внутри которой размещена гайка, упругая связь выполнена в виде четьфех попарно параллельных плоских пружин, первая пара которых концами связана с рамкой а серединой - с гайкой,вторая пара перпендикулярна первой и концами связана с ведомым звеном, а серединой - с рамкой,а механизм снабжен двумя предназначенными для ограничения радиальных перемещений гайки упорами, первый из которых закреплен на рам- ке и предназначен для взаимодействия с ведомым звеном, а второй закреплен на гайке и предназначен для взаимодействия с рамкой.
2. Механизм по п. 1, отличающийся тем,что корпус гайки герметичен и заполнен вязкой жидкостью.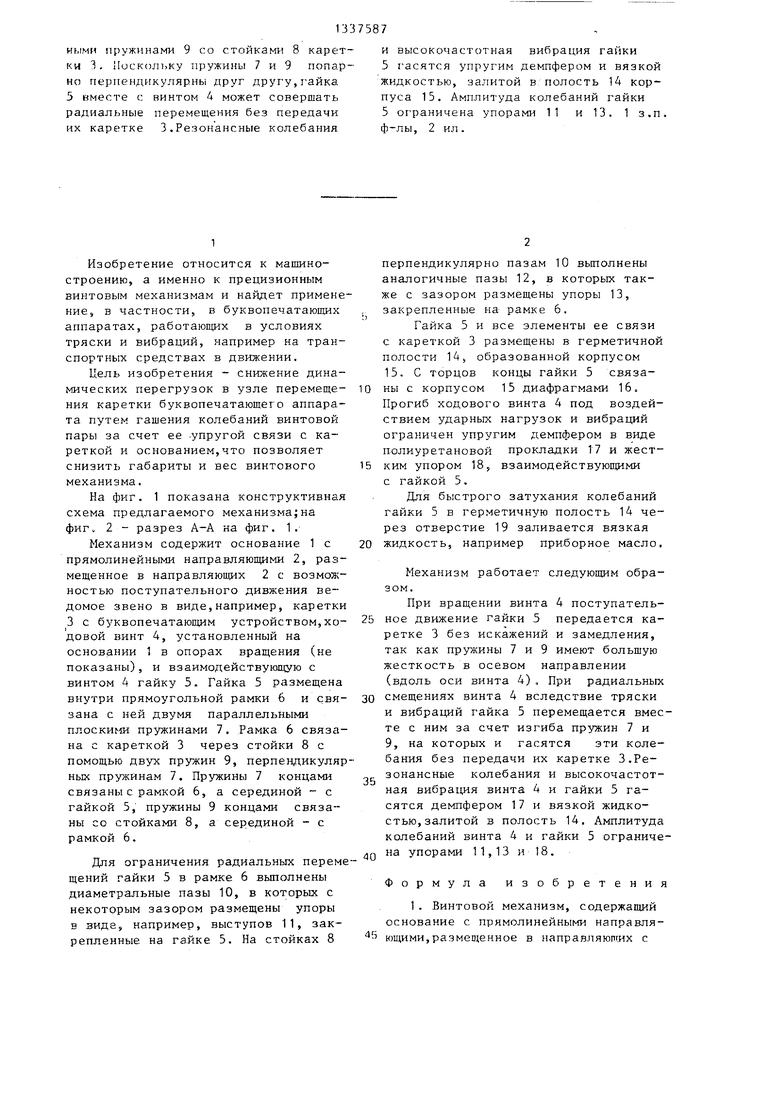
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Стенд для испытания замков | 1988 |
|
SU1705720A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР КОЧЕТОВА | 2014 |
|
RU2659128C2 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР | 2015 |
|
RU2584291C1 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР КОЧЕТОВА | 2015 |
|
RU2597683C2 |
| Устройство для подгонки величиныСОпРОТиВлЕНия РЕзиСТОРОВ | 1979 |
|
SU828223A1 |
| ВИБРОИЗОЛЯТОР ПРУЖИННЫЙ КОЧЕТОВА | 2015 |
|
RU2597686C2 |
| ГАСИТЕЛЬ ВИБРАЦИЙ | 2021 |
|
RU2774322C1 |
Изобретение относится к прецизионным винтовым передачам и найдет применение, в частности, в буквопечатающих аппаратах, работающих в условиях тряски и вибраций.Ходовой винт 4 установлен на основании 1 в двух опорах вращения, одна из кото- .рык вьшолнена плавающей в радиальном направлении. При его в ащении поступательное движение гайки 5 передается каретке 3 без искажений и замедления, так как гайка 5 связана с кареткой 3 через две плоские пружины 7, связанные концами с рамкой 6,а последняя связана аналогичГХ Т ,j,jj,,,/,,,.A,,..j,.,. /XXX/y V fX V XX/xWXXX/xV X///XX/. А / / V и S к ГО.Л 5 ю,п ФигЛ ,,,.A,, WXXX/xV V ГО.Л ю,п ФигЛ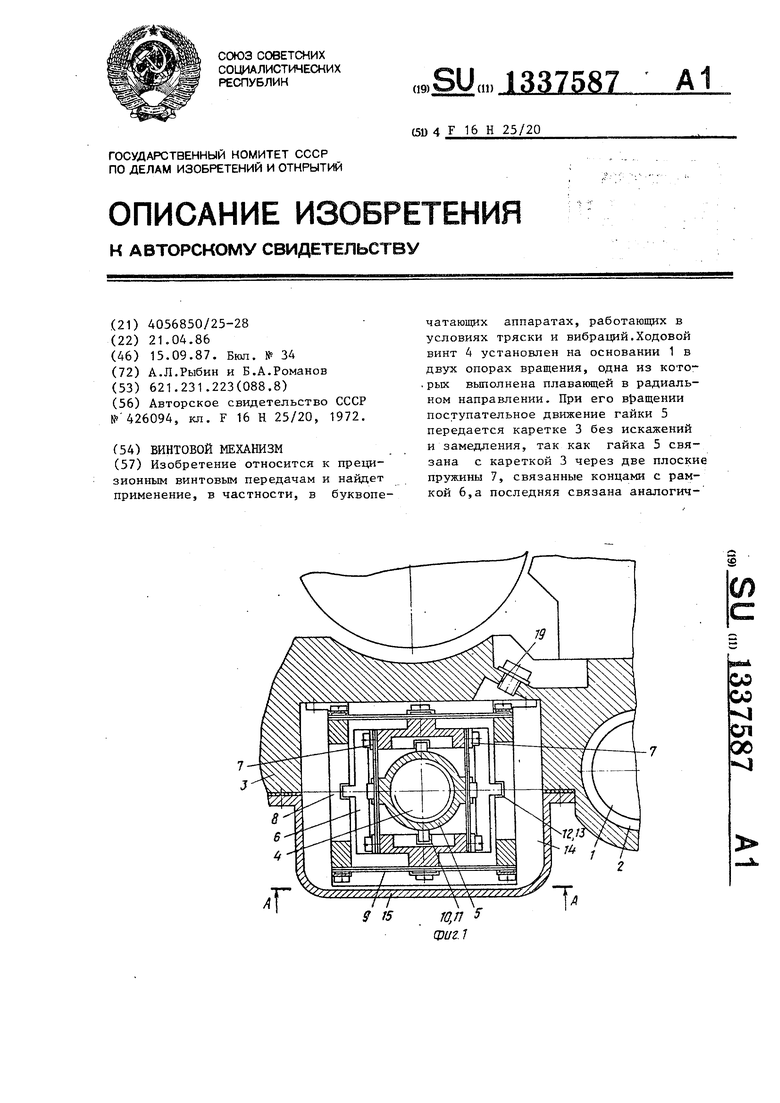
Редактор Ю.Середа
Составитель В.Савинцкий
Техред Л.Сердюкова Корректор Н,Король
Заказ 4111/32Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
CPU г. 2
| ВИНТОВОЙ МЕХАНИЗМ | 1972 |
|
SU426094A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
