Изобретение относится к электротехнике, а именно к способу измерения асимметрии импульсов управления, и может быть использовано при настройке систем управления преобразователями тиристорных электроприводов средней и большой мощности, в частности электроприводов клетей многоклетьевых прокатных станков.
Цель изобретения - повышение точности настройки системы импульсно- фазового управления на конкретный преобразователь и конкретную питающую сеть,
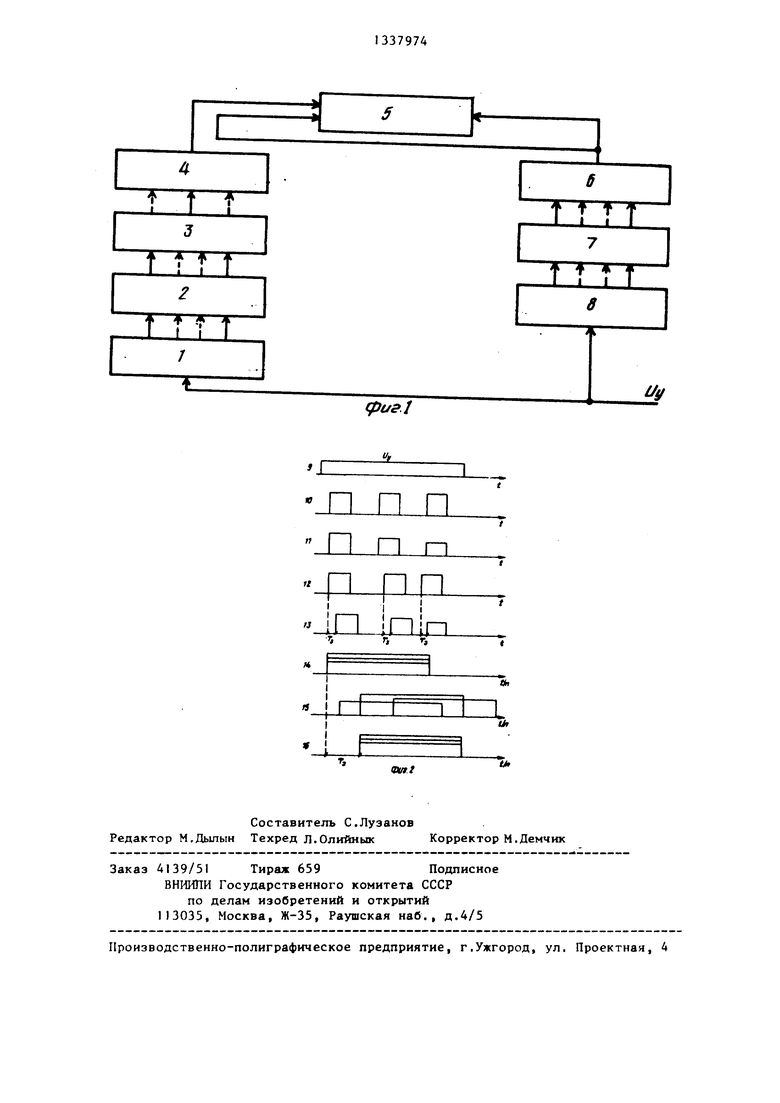
На фиг.1 приведена блок-схема устройства, реализующая предлагаемый способ; на фиг.2 - диаграммы работы.
Устройство состоит из рабочей системы 1 импульсно-фазового управления, 20 блока 2 ключей, блока 3 элементов ИЛИ, блока 4 задержки, двухлучевого осциллографа 5, второго блока 6 элементов ИЛИ, второго блока 7 ключей.
через систему 8 привод вьшодится на рабочий режим и изменением угла управления добиваются равенства токов
I в каждой фазе. При этом определяют угол управления тиристорами для каждой фазы. Эти измерения проводят несколько раз ( порядка десяти) , в течение суток, а затем повторяют их
10 в течение, например,, недели, т.е. на максимальном периоде нестабильности сети. Затем определяют математическое ожидание углов управления тиристорами для каждой фазы. При заданном
15 сигнале управления, который выводит двигатель на рабочий режим, выставляют математическое ожидание углов управления тиристорами и таким образом получают эталонную систему 8.
Эталонную систему 8 можно определять и по другим принципам. Например, в простом случае эталонной считают такую систему, которая изготовлена и настроена тщательным обэталонной системы 8 импульсно-фазово- 25 разом. Это позволяет контролировать
работу рабочих систем в переходных режимах.
После настройки эталонной системы 8 рассмотрим работу всего устройст- 30 ва.
го управления.
Блоки 3 и 7 предназначены для выделения требуемого канала. Осциллограф 5 может быть однолучевым, но тогда устройство должно быть дополнено коммутатором для обеспечения подачи на вертикальные пластины двух сигналов: от рабочей и эталонной систем 1 и 8.
На фиг.2 показаны диаграммы, где обозначено: 9 - сигнал управления
35
Как видно из фиг.1, на вход рабочей 1 и эталонной 8 систем подается управляющий сигнал U . Сигнал с вько- да эталонной системы 8 через блок 7 и второй блок 6 подается н,- призон- тальньм вход ждущей разр.ертки осциллографа 5 и на второй вертикальный вход осциллографа 5. Блоком 7 выбии.
10 и 11 - выходные сигналы эталонной системы 8 без масштабирования и с масштабированием по каналам; 12 и 13 - сигналы на входе и выходе блока 4 задержки; 14, 15 и 6 - выходные сигналы эталонной сислемы 8 и системы 1 до и после настройки. Управляющий сигнал U подается одновременно на системы 1 и 8, при этом выход системы 8 соединен с входами блока 7, вьшоды последнего соединены с входами блока 6, выход которого соединен с горизонтальным и вторым вертикальным входом осциллографа 5 ( осц1-ьтлограф 5 работает в режиме ждущей развертки). Выход системы 1 соединен через блок 2 с входами блока 3, выход которого через блок 4 соединен с первым вертикальным входом осциллографа 5.
Предварительно происходит настройка эталонной системы 8. Для этого
через систему 8 привод вьшодится на рабочий режим и изменением угла управления добиваются равенства токов
в каждой фазе. При этом определяют угол управления тиристорами для каждой фазы. Эти измерения проводят несколько раз ( порядка десяти) , в течение суток, а затем повторяют их
в течение, например,, недели, т.е. на максимальном периоде нестабильности сети. Затем определяют математическое ожидание углов управления тиристорами для каждой фазы. При заданном
сигнале управления, который выводит двигатель на рабочий режим, выставляют математическое ожидание углов управления тиристорами и таким образом получают эталонную систему 8.
Эталонную систему 8 можно определять и по другим принципам. Например, в простом случае эталонной считают такую систему, которая изготовлена и настроена тщательным об5
Как видно из фиг.1, на вход рабочей 1 и эталонной 8 систем подается управляющий сигнал U . Сигнал с вько- да эталонной системы 8 через блок 7 и второй блок 6 подается н,- призон- тальньм вход ждущей разр.ертки осциллографа 5 и на второй вертикальный вход осциллографа 5. Блоком 7 выби0 рается исследуемый канал. Предварительно осуществляется калибровка осциллографа 5, которая заключается в выборе определенного соотношения между временем развертки и диапазо5 ном измеряемых фазовых сдвигов. При появлении управляющих импульсов на выходе эталонной системы 8 сигнал через блоки 7 и 6 запускает ждущего развертку осциллографа 5 и одновременно подается на второй вертикальный вход осциллографа 5. Одновременно сигнал Uy подается и на рабочую исследуемуюj систему 1, выход которой через блоки 2, 3 и 4 подается на
g первый вертикальный вход осциллографа 5. Так как осциллограф 5 откалиб - рован, каналы прохождения импульсов от эталонной 8 и рабочей 1 систем без блока 4 идентичны, а время запаз0
дьшания, вносимое блоком 4, известно, поэтому по импульсу, подаваемому от рабочей системы 1 на первый вертикальный вход осциллографа 5, можно судить об асимметрии управляющих импульсов рабочей системы 1 относительно эталонной. Изменяя параметры рабочей системы 1,можно добиться чтобы импульсы на выходе рабочей системы I появлялись одновременно с импульсами на выходе эталонной системы 8.
Устройство, изображенное на фиг.1. позволяет проверить рабочую систему 1 в процессе эксплуатации, когда положение управляющих импульсов зависит от величины сигнала управления. Для этого вход рабочей системы 1, которая посылает сигналы для управления тиристорами работающего привода, следует параллельно подключить к устройству, изображенному на фиг.I. Хотя управляющие импульсы на выходе эталонной 8 и рабочей 1 систем перемещаются во времени, но в течение одного периода развертки они неподвижны, что позволяет на работающем устройстве определить асимметрию управляющих импульсов рабочей системы импульсно-фазового управления относительно эталонной.
Таким образом, предлагаемый способ дает возможность настраивать системы на заданную асимметрию и, кроме того, проводить исследования рабочих систем без отключения привода в процессе его эксплуатации. Кроме того, устройство, реализующее способ проще известных, так как в нем отсутствует сложный узел синхронизации его функции выполняет осциллограф.
Экономический эффект достигается за счет настройки системы импульснофазового управления преобразователем, 45 значение углов управления в эталонпри этом неидентичность цепей управления и параметров питающей сети сведена к минимальной величине. Это уменьшает пульсации тока нагрузки
преобразователя, приводит к равномерной загрузке фаз по току и исключает появление в ЭДС преобразователей периодических составляющих. Исключение этих режимов приводит к увеличению производительности механизмов и уменьшает потребление электрической энергии на единицу продукции.
Формула изобретения
Способ настройки системы импульсно-фазового управления преобразователем, заключающийся в том, что включает одновременно эталонную и рабочую системы импульсно-фазового управления, сравнивают моменты времени появления импульсов управления на соответствующих выходах обеих систем, на обе системы импульсно-фазового управления подают сигнал управления, подстраивают соответствующие каналы рабочей системы импульсно-фазового управления до совпадения контролируемых импульсов управления, о т л и- чающий- ся тем, что, с целью повышения точности настройки, предварительно подключают эталонную систему импульсно-фазового управления к преобразователю и включают их в рабочий режим, измеряют токи в каждой фазе преобразователя п раз в
течение отрезка времени, сГпределяе- мого длительностью периода нестабильности периода питающей сети, каждый раз подстраивают эталонную систему импульсно-фазового управления до получения равенства токов в фазах, измеряют полученные при этом углы управления, после чего вычисляют математическое ожидание угла управления и устанавливают вычисленное
ной системе импульсно-фазового управления, проводя вышеуказанную настройку рабочей системы импульсно-фазового управления.
-- П П n
O in nin
Составитель С.Луэанов Редактор М.Дьшьш Техред Л.Олийньж ..
Заказ 4139/51 Тираж 659Подписиое
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно
-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
(pafi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки систем импульсно-фазового управления преобразователями | 1987 |
|
SU1510052A1 |
| Цифровое устройство для управления тиристорным преобразователем | 1981 |
|
SU949768A1 |
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| Устройство для контроля асимметрии импульсов | 1978 |
|
SU771823A1 |
| Зависимый тиристорный реверсивный преобразователь | 1984 |
|
SU1228181A1 |
| Цифровое устройство для управления тиристорным преобразователем | 1981 |
|
SU989743A1 |
| Реверсивный вентильный электропривод | 1978 |
|
SU782108A1 |
| Способ управления асинхронным электроприводом | 1989 |
|
SU1721778A1 |
| Цифровое устройство для управления ведомым сетью преобразователем | 1985 |
|
SU1259440A1 |
| Устройство для импульсно-фазового управления тиристорным преобразователем | 1990 |
|
SU1764128A1 |
Изобретение относится к электротехнике, а именно к способам измерения асимметрии импульсов управления. Цель изобретения - повышение ;точности настройки системы импульс- но-фазового управления. Данный способ позволяет настраивать систему на заданную асимметрию, проводить исследования рабочих систем без отключения привода. Система настраивается таким образом, чтобы неидентичность цепей управления и параметров питающей сети была сведена к минимуму. 2 ил. ё (Л со со