Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано для регулирования положения и скорости электроприводов постоянного тока с питанием от сети переменного тока через вентильный преобразователь.
Цель изобретения - повышение точности регулирования электроп ривода.
На фиг.1 представлена схема электропривода постоянного тока; на фиг. 2 - схема таймера; на фиг.З - алгоритм процедуры вычислений блока управления тиристорами.
Электропривод постоянного тока (фиг.1) содержит двигатель 1, подключенный через тиристорный преоб- , разователь 2 к питающей сети, блок 3 управления тиристорами, входы кото рого через коммутатор 4 соединены с датчиком 5 скорости, датчиком 6 положения, датчиком 7 тока, задат- чиком 8 скорости, а также генератор 9 импульсов и датчик 10 синхронизации, входом соединенный с питающей сетью, три таймера 11-13 и буферный регистр 14. Информационные входы таймеров 11-13 соединены с выходами блока 3, входы прерьтания программы которого соединены с выходами переполнения таймеров 11-13, счетные входы которых соединены с генератором 9 импульсов. Входы очистки таймеров 11 и 13 соединены с выходом переполнения таймера 13, выход переполнения и вход очистки таймера 12 соединены между собой, информационный выход таймера 13 соединен с входом блока 3, вход прерывания которог соединен с выходом датчика 10. Управляющий вход коммутатора и вход датчика 7 тока соединены с выходом переполнения таймера 13, а управляющий вход тиристорного преобразователя 2 через буферный регистр 14 соединен с выходами блока 3..Датчик 10 синхронизации содержит фильтр-формирователь, который выдает импульсы, соответствующие моменту естественного зажигания тиристора тиристорного преобразователя 2, условно названного нулевым.
Для определения момента естественного зажигания фильтр выделяет первую гармонику анодного напряжения этого тиристора.
С валом двигателя 1 механически связаны датчик 5 скорости и датчик 6 положения, осуществляющие- преобразование механических величин в цифровой многоразрядный код, заданный электрическими сигналами, В якорной цепи двигателя 1 установлен шунт, падение напряжения с которого подается на вход датчика 7 тока, измеряющего средний ток двигателя 1. Время интегрирования датчика 7 тока равно интервалу между моментами появления импульсов переполнения на вьпсоде таймера 13, для чего выход переполнения таймера 13 соединен с вторым входом датчика 7 тока.
Цифровые сигналы с датчиков скорости 5, положения 6 и тока 7 и сигнал с задатчика 8 скорости подаются
во входные порты блока 3 через коммутатор 4, управляемый сигналом с выхода переполнения таймера 13. При появлении сигнала переполнения коммутатор 4 включается и данные с датчиков запоминаются во входных буферных регистрах блока 3.
Блок 3 выдает вычисленное значение временных задержек через выходные порты на информационные входы
таймеров 11-13. Через выходной порт блок 3 выдает в буфферный регистр 14 код, соответствующий номеру зажигаемого тиристора тиристорного преобразователя 2. Происходит зажигание очередного тиристора. Выдача производится по сигналам с выходов переполнения таймеров 11 или 12, которые соединены с входами прерьша- ния программы, выполняемой блоком 3 в настоящее время.
Система обслуживания прерываний, являкядаяся принадлежностью блока 3, работает следующим образом.
При появлении на входе прерывания сигнала блок 3 анализирует уровень приоритета этого сигнала по сравнению с приоритетом выполняемой программы. Если выполняется программа обслуживания сигнала более высокого приоритета, чем поступивший сигнал, блок 3 сначала заканчивает выполняемую программу, а затем переходит на обслуживание поступившего запроса. В противном случае блок 3 прерывает выполнение текущей программы и пере- на обслуживание поступившего запроса. После окончания этой прог312
раммы блок 3 возвращается к выполнению прерванной программы.
Блок 3 программно может запретить или разрешить прохождение сигнала прерьгаания по любому входу.
Распределение уровней прерывания принято следующее. Наиболее высоким приоритетом обладает сигнал переполнения с выхода таймера 11, следующи
ми по уровню приоритета являются сиг- О ются собственным сигналом переполналы с выхода таймера 12 и с выхода датчика 10 синхронизации. Наиболее низким приоритетом обладает сигнал с таймера 13.
Система обслуживания сигналов пре- 5 образом.
рываний вычислительного процесса обеспечивает при появлении сигнала на входах прерываний более высокого приоритета прерьтание выполнения программы обслуживания сигнала прерыва- 20
ния более низкого приоритета.Блок 3, закончив программу обслуживания сигнала прерывания более высокого приоритета, переходит к выполнению прерванной программы. При этом блок 3 25 программно может запретить и разрешить работу системы прерываний по любому входу. При выполнении всех
программ обслуживания прерываний блок 3 переходит в режим ожидания 30 сигнала прерывания. При появлении сигнала на выходе таймера 13 блок 3 вьщает в таймер 11 вычисленное значение задержки импульса переполнения на его выходе по отношению к мо- ля 2.
:менту очистки счетчика, а так же значение аналогичной задержки, но для таймера-12. Эти значения вычис- чпяются блоком 3 на предьщущем интервале повторения вычислений и хра нятся в его памяти. Затем блок 3 переходит к вычислению угла управления тиристорньм преобразователем 2, который должен быть реализован н следующем интервале повторения вы- числений, т.е. последовательно выполняет функции П или ПИ регуляторов положения, скорости и среднего тока по известным выражениям. I «
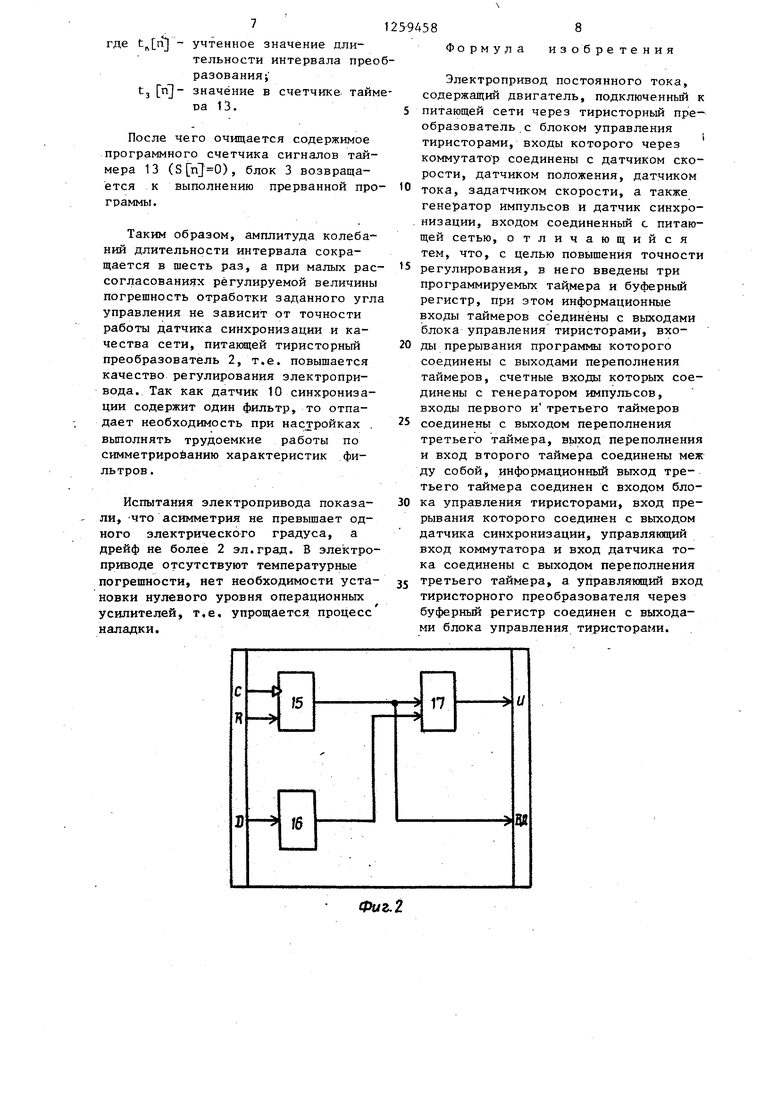
Таймер (фиг.2) является програм- мируемым и содержит счетчик 15 импульсов, регистр 16 данных и схему 17 сравнения кодов. При появлении сигнала на входе R содержимое счетчика 15 очищается. Когда значение числа на выходе счетчика 15 равно числу, записанному в регистре 16, чрез информационный вход на выходе
схемы сравнения появляется импульс, которьш поступает на выход таймера - выход переполнения. Таймер имеет так же информационный выход, на котором устанавливаются данные счетчика 15.
Счетчик таймера 11 очищается по сигналу на выходе переполнения таймера 13,. счетчики таймера 12 очнщанения, а счетчик таймера 13 очищает- ся при записи информации в регистр 16 данных.
Электропривод работает следующим
I При подаче напряжения питания бпвк 3 переходит на программу начальной установки. При этом запрещаются прерывания от всех входов, очищаются необходимые ячейки памяти вычислительного блока и он переходит в режим ожидания сигнала прерывания с выхода датчика 10 синхронизации. При появлении этого сигнала блок 3 переходит на начальную программу обслуживания от датчика 10 синхронизации. Блок 3 выдает на информационный вход таймера 13 число, соотве тст- вукщее расчетной дли тельности интервала между моментами срабатывания таймера 13. Это число равно периоду питающего тиристорный преобразователь 2 напряжения, деленному на число фаз тиристорного преобразователя 2.
Затем вычислительный блок 3 переходит к вычислению угла управления тиристорным преобразователем, который должен быть реализован после появления сигнала переполнения таймера 13. Интервал времени, заключенный между этими сигналами, далее назьшается интервалом повторения вычислений (ИПВ). Блок 3 последовательно выполняет следующие процедуры: П - процедура регулятора положения, в результате которой вычисляется заданное значение скорости, процедура ПИ регулятора скорости, в результате которой вычисляется заданное значение тока, процедура ПИ регулятора: тока, результатом которой является вычисленное значение угла управления, которое реализуется на следующем ИПВ.
В соответствии с вычисленным значением угла управления блок 3, выполняя программу синхронной систе «
импульсно-фазового управления, вычисляет задержку зажигания очеред- -ного тиристора относительно момента появления сигнала на выходе таймера 13 и номер зажигаемого тиристора. Нумерация тиристоров принята соот- ветствукнцей очередности их зажигания после нулевого при постоянном угле управления.
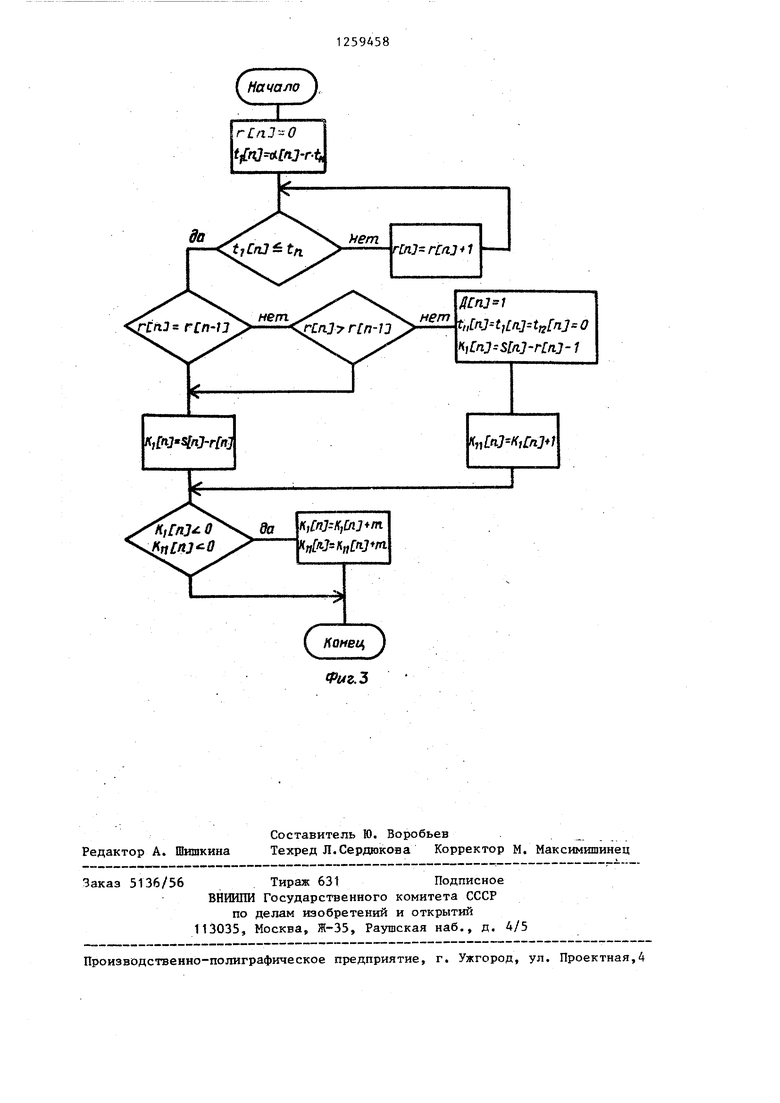
Алгоритм процедуры указанных вычислений приведен на фиг.З, где приняты обозначения:
t, rtl - задержка зажигания, вычисленная на П-интервале повторения вычислений
сс пТ - вычисленное на этом же интервале значение угла управления,
га - количество фаз тиристорного преобразователя 2j
rfn - вспомогательная величина;
- данные счетчика срабатываний таймера 13{
ДИ - признак необходимости повторного зажигания на п+1 интервале повторения вычислений;
К,п - номер зажигаемого тирис- тара.
После выполнения программы синхронной системы импульсно-фазового управления вычислительный блок устанавливает признак, что начальная программа выполнена, разрешает прерывание от таймера 13 и переходит в режим ожидания сигнала прерывания от этого таймера, t ,
Таймер 13, отработав заданную
задержку времени, выдает сигнал прерывания и блок 3 переходит на программу его обслуживания, одновременно очистив счетчик 15 таймера 11.
Программа обслуживания начинается с выдачи величины t( в регистр 16 таймера 11 и величины t,, в таймер 12, затем выполняется описанный алгоритм вычисления угла управления После чего вычислительный блок сравнивает модуль величины рассогласования регулируемого параметра (угла .поворота или угловой скорости) с заданным значением, занесенным в память блока 3, при наладке устройства.
Если модуль рассогласования больше заданного значения, выполняется описанный алгоритм синхронной системы импульсно-фазового управления. При этом величина задержки зажигания
tj в П - п-1 + t,
где 0 Ln-lj - угол управления тирис- торным. преобразователем, вычислен- ный на предыдущем -интервале,
tj - длительность интервала преобразования.
Номер зажигаемого тиристора
10
К,п
КГп-1 +1 ,если Kj n-1 im-1; О если Кг .
После чего разрешается прерывание от сигнала с выхода таймера 12 и блок 3 переводится в режим ожидания.
После отработки таймером 11 величины задержки t на его выходе
появляется импульс и блок 3 переходит на обслуживание этого сигнала. Программа начинается с выдачи в бу- ферньй регистр 14 кода, соответствующего зажиганию тиристора с номером K,tnJ, затем проверяется необходимость повторного зажигания. Если эта необходимость существует, то в регистр 16 .таймера 11 вычислительный блок выдает новое значение
задержки и возвращается к выполнению прерванной программы. После повторного срабатывания таймера выдается новое значение и очищается признак.
После отработки таймером 12 величины задержки t на его выходе появляется импульс, и блок 3 переходит на обслуживание этого сигнала. Программа обслуживания заключается в. выдаче в буфферный регистр 14 кода, соответствукядего зажиганию тиристора с номером К, п}, и блок 3 возвращается к выполнению прерванной программы.
При появлении сигнала прерывания на выходе датчика 10 синхронизации программа обслуживания после выпол- , нения начальной программы осуществляется в соответствии с алгоритмом
7tnCn-ll-t rn-0
если
tjCn 0,6tjn-l ;
6tnrn-ll-t,rn-ll
6 Ц И -0,4tjn-l
если
1259458
де - учтенное значение длительности интервала преоб- раэования
tj значение в счетчике тайме- оа 13.
сод пи обр тир ком рос ток ген низ щей тем рег про рег вхо бло ды сое тай дин вхо сое тре и в ду тье ка рыв дат вхо ка тре тир буф ми
После чего очищается содержимое программного счетчика сигналов таймера 13 (), блок 3 возвращается к выполнению прерванной про граммы.
Таким образом, амплитуда колебаний длительности интервала сокращается в шесть раз, а при малых рас согласованиях регулируемой величины погрешность отработки заданного угл управления не зависит от точности работы датчика синхронизации и качества сети, питающей тиристорный преобразователь 2, т.е. повышается качество регулирования электропривода. Так как датчик 10 синхронизации содержит один фильтр, то отпадает необходимость при настройках выполнять трудоемкие работы по симметрироёанию характеристик фильтров.
Испытания электропривода показа- ли, ЧТО асимметрия не превышает одного электрического градуса, а дрейф не более 2 эл.град. В электроприводе отсутствуют температурные погрешности, нет необходимости уста- новки нулевого уровня операционных усилителей, т.е. упрощается процесс нападки.
8
Формула изобретения
Электропривод постоянного тока, содержащий двигатель, подключенный к питающей сети через тиристорный преобразователь .с блоком управления тиристорами, входы которого через коммутато р соединены с датчиком скорости, датчиком положения, датчиком тока, задатчиком скорости, а также генератор импульсов и датчик синхронизации, входом соединенный с питающей сетью, отличающийся тем, что, с целью повышения точности регулирования, в него введены три программируемых и буферньй регистр, при этом информационные входы таймеров соединены с выходами блока управления тиристорами, входы прерывания программы которого соединены с выходами переполнения таймеров, счетные входы которых соединены с генератором импульсов, входы первого и третьего таймеров соединены с выходом переполнения третьего таймера, выход переполнения и вход второго таймера соединены меж ду собой, информационный выход третьего таймера соединен с входом блока управления тиристорами, вход прерывания которого соединен с выходом датчика синхронизации, управлянщий вход коммутатора и вход датчика тока соединены с выходом переполнения третьего таймера, а управляющий вход тиристорного преобразователя чере:з буферный регистр соединен с выходами блока управления тиристорами.
Фмг.2
(начало
r/:nj -o


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| Цифровое устройство для фазовогоупРАВлЕНия МНОгОфАзНыМ ТиРиСТОРНыМпРЕОбРАзОВАТЕлЕМ | 1979 |
|
SU843147A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| Устройство для цифрового управления электродвигателем постоянного тока | 1989 |
|
SU1744785A1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРНЫМ НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ ПРИ ПОМОЩИ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ | 2002 |
|
RU2239276C2 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
Изобретение относится к злектро- технике и может быть использовано для регулирования положения и скорости электродвигателей. Повышение точности регулирования электропривода обеспечивается путем уменьшения величины погрешности отработки заданного угла управления тиристор- ным преобразователем за счет введения в устройство трех программируемых таймеров 11,12, 13 и буферного регистра 14. Информационные входы, таймеров 11, 12, 13 соединены с выходами блока 3, входы прерывания программы которого соединены с выходами переполнения таймеров 11, 12, 13, соединены счетными входами с генератором импульсов 9. Управляющий вход тиристорного преобразователя 2 через буферный регистр 14 соединен с выходами блока 3. 3 ил. е (Л Ел S сд 00
( конец j Фиг.З
Редактор А. Шишкина
Составитель Ю. Воробьев
Техред Л.Сердюкова Корректор М. Максимишинец
Заказ 5136/56 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Информзлектро, 1980, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1977 |
|
SU738080A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
