Известные бесконтактные анкерные приводы электрических часов, выполненные в виде постоянного магнита, взаимодействующего с двумя соленоидами, включенными в эмиттерную и коллекторную цепи полупроводникового триода, сложны по устройству, имеют в кинематической цепи большое число соударяющихся деталей, что отражается на точности работы часов.
Предлагаемое устройство упрощает конструкцию привода и повышает точность хода часов. Для этого в приводе применен один рычаг с рожком для возбуждения привода, сообщения импульса балансу и перемещения стрелочного механизма.
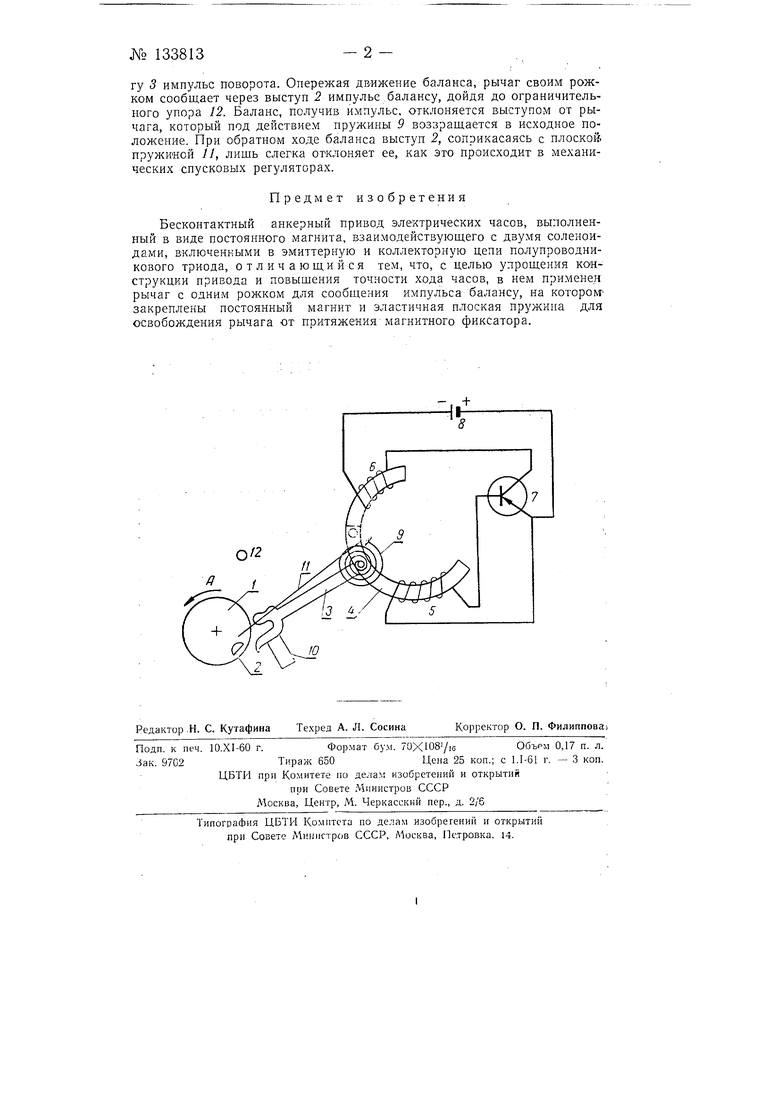
На чертеже приведена схема бесконтактного анкерного привода электрических часов.
Привод состоит из ролика /, укрепленного на оси баланса (на схеме не показан), несущего эллипсовидный выступ 2, взаимодействующий с рычагом 3. Рычаг 3 соединен с подковообразным постоянным магнитом , плечи которого могут перемещаться в соленоидных катушках 5 обратной связи и 6 тяговой. Обе катушки включены по схе.ме с общим эмиттером в усилительный каскад, собранный на полупроводниковом триоде 7. Питание схемы производится от общего источника тока 8. Рычаг 3 удерживается в исходном положении пружиной 9 л дополнительно фиксируется постоянным магнитом 10. На рычаге 3 закреплена эластичная плоская пружина 11, освобождающая рычаг от притужения магнита. Рабочий ход рычага ограничен упором 12.
При движении баланса по стрелке А (рабочий ход) выступ 2, упираясь в плоскую пружину //, открывает рычаг 3 от магнитного фиксатора н начинает перемещать рычаг. При этом подковообравный магнит 4 наводит в катушке 5 обратной связи э.д.с., и открывшийся триод 7 ссздает ток в цели тяговой катушки 6, которая сообщает рычагу 3 импульс поворота. Опережая движение баланса, рычаг своим рожком сообщает через выступ 2 импульс балансу, дойдя до ограничительного упора 12. Баланс, получив импульс, отклоняется выступом от рычага, который под действием пружины 9 возвращается в исходное положение. При обратном ходе баланса выступ 2, соприкасаясь с плоской, пружиной 11, лишь слегка отклоняет ее, как это происходит в механических спусковых регуляторах.
Предмет изобретения
Бесконтактный анкерный привод электрических часов, выполненный в виде постоянного магнита, взаимодействующего с двумя соленоидами, включенными в эмиттерную и коллекторную цепи полупроводникового триода, отличающийся тем, что, с целью упрощения конструкции привода и повышения точности хода часов, в нем применен рычаг с одним рожком для сообщения импульса балансу, на которомзакреплены постоянный магнит и эластичная плоская пружина для освобождения рычага от притяжения магнитного фиксатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный электромагнитный балансовый привод для часового механизма | 1959 |
|
SU127613A1 |
| Бесконтактный анкерный привод электрических часов | 1960 |
|
SU135027A1 |
| Электрические часы с роторным приводом | 1957 |
|
SU114051A1 |
| Пружинный преобразователь | 1960 |
|
SU140750A1 |
| Преобразователь хода баланса наручных электрических часов | 1960 |
|
SU139248A1 |
| Электромагнитный часовой ход | 1956 |
|
SU114353A1 |
| Механизм пускастопа баланса | 1954 |
|
SU101891A1 |
| Электронно-механический хронометр | 1960 |
|
SU138965A1 |
| Инерционный ограничитель механизма движения для электрических наручных часов | 1959 |
|
SU124872A1 |
| Устройство для выравнивания перемещений секундной стрелки крупногабаритных электрических часов | 1960 |
|
SU140749A1 |
