зывает возвратно-поступательное движение упругого элемента и дозирующего элемента 3. Последний раздает корм из окна 2 в кормушку 18. Угол поворота подвижного управляющего элемента 13 и неподвижного управляющего элемента определяет дозу выдаваемого корма и регулируется установкой упорного стержня 19 относительИзобретение относится к механизации животноводства, а именно к устройствам дозирования ПРИ раздаче кормов.
Целью изобретения является повьпие ние точности дозирования корма и рас ширение технологических возможностей устройства.
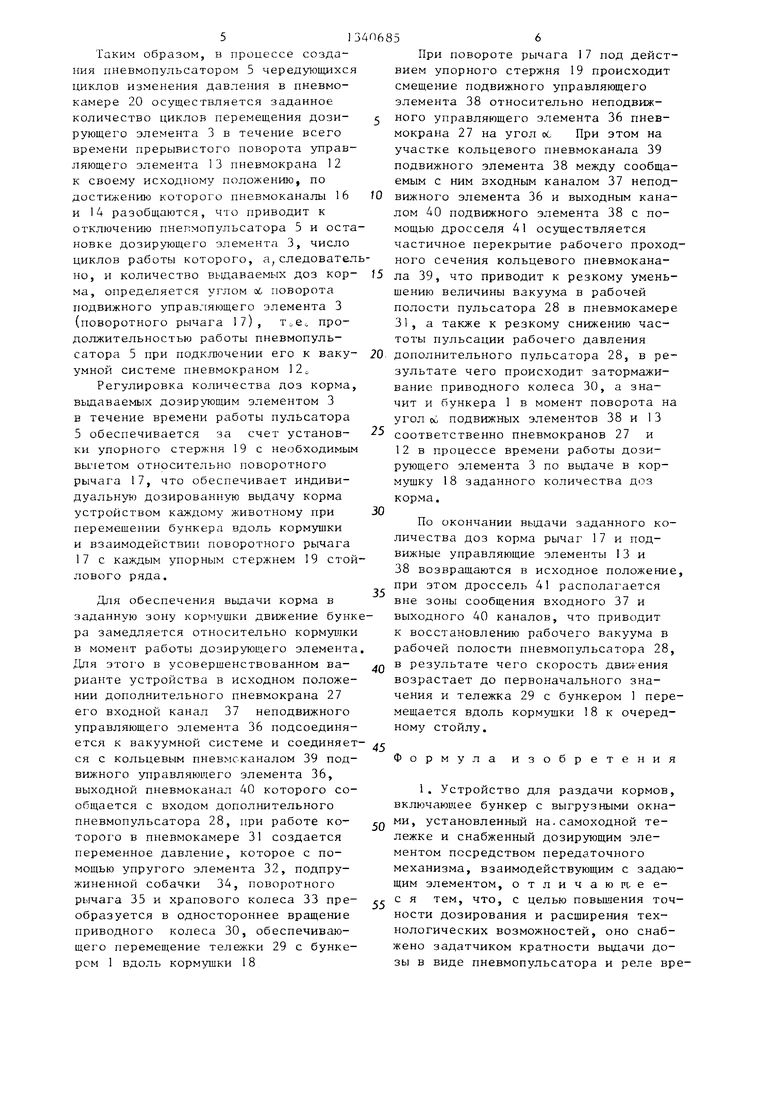
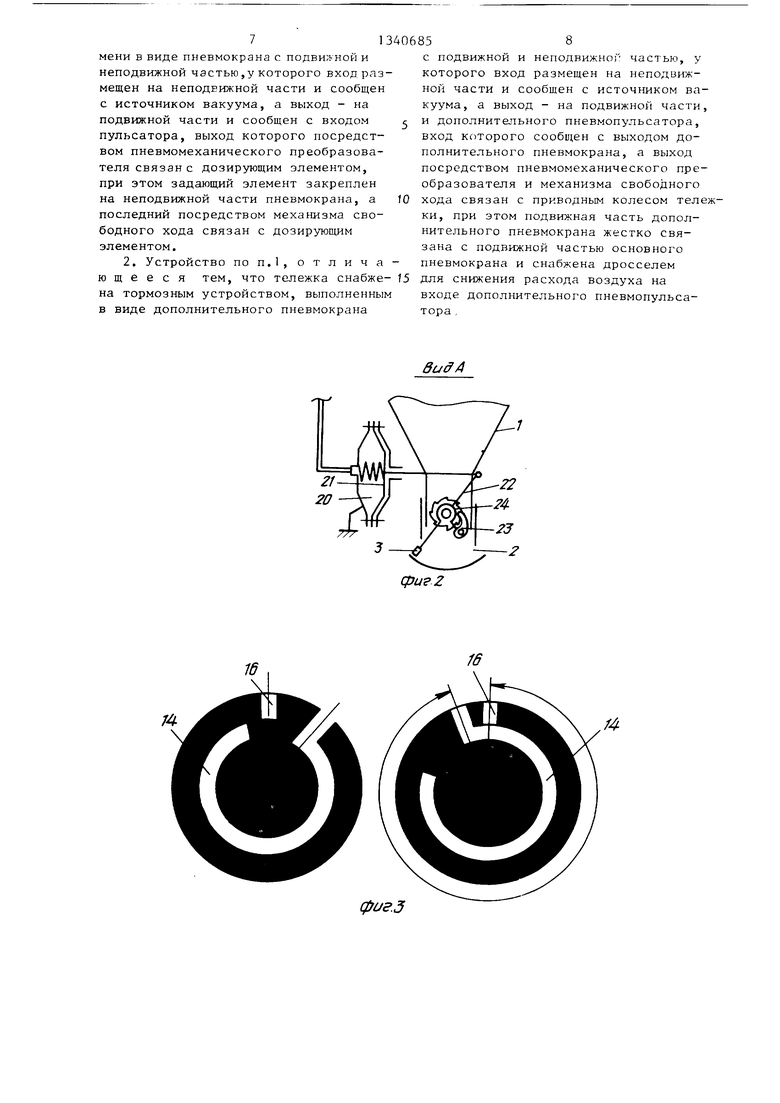
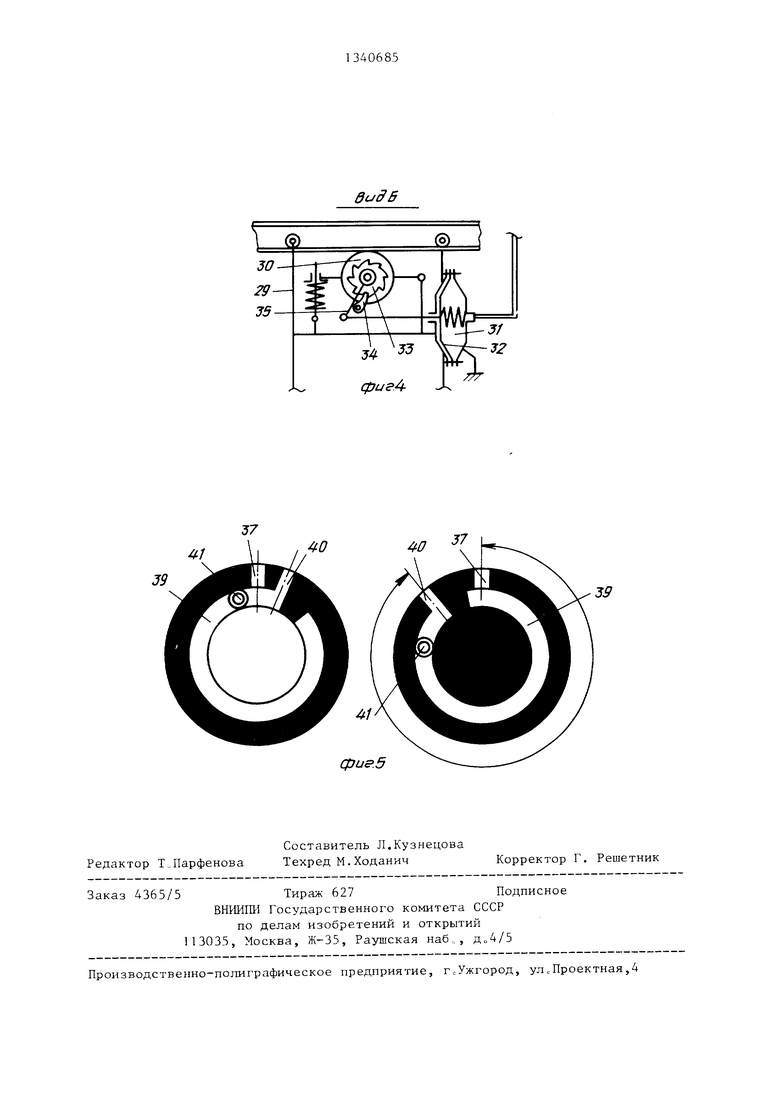
На фиг.1 показано предлагаемое устройство, общий вид; на фиг.2 - вид А на фиг.1; на фиг,3 - пневмо- кран исходное и рабочее положения управляюп1,их элементов пневмокрана) , поперечное сечение; на фиг.4 - вид Б на фиг.1; на фиг.5 - дополнительный пневмокран (исходное и рабочее положения управляющих элементов пневмокрана) поперечное сечение.
Устройство включает бункер 1 с выгрузными окнами 2, снабженный подвижным дозирующим элементом 3, выполненным в виде поворотного скребка закрепленного на оси 4 для вьщачи материала из бункера через выгрузные окна 2.
Дозирующий элемент 3 снабжен за- датчиком кратности выдачи доз, выполненным в виде пневмопульсатора 5, который содержит камеру 6 постоянног вакуума, камеру 7 переменного вакуум камеру 8 постоянного избыточного (атмосферного) давления, подвижный шток 9, один конец которого прикреплен к мембране 10, другой - соединен с клапаном 11. Пневмопульсатор в исходном положении открыт и сообщает камеры 6 и 7,
На выходе задатчика 5 установлено реле времени, выполненное в виде пне мокрана 12, содержащего подвижный упно упорного стержня 19. Замедление движения бункера 1 в зоне кормушки 18 осуществляется за счет перекрытия проходного сечения кольцевого пневмо- канала 39. Это ведет к снижению частоты пульсации дополнительного пульсатора 28, что ведет к затормаживанию приводного колеса 30 и бункера 1. 1 3.п. ф-лы, 5 ил.
равляющий элемент 13 с кольцевым пне моканалом 14, сообщаемым с камерой 6 постоянного вакуума пневмопульсатора 5, и неподвижный управляющий элемент 15 с входным пневмоканалом 16, сооб- щиющимся с вакуумной системой (не показана).
Подвижный управляющий элемент 13 жестко соединен с поворотным рычагом 17, взаимодействующим с задающим элементом, выполненным в виде установленных вдоль кормушки 18 у каждого стойла упорных стержней 19.
Кроме того, в устройстве имеется передаточный механизм для перемещения дозирующего элемента 3, содержащий пневмокамеру 20, сообщающуюся с полостью камеры 7 переменного вакуума пневмопульсатора 5, упругий элемент 21, и щарнирно соединенный с ним рычаг 22, закрепленный на оси 4, при этом дозирующий элемент 3 связан с подвижным управляющим элементо 13 пневмокрана 12 посредством двух последовательно соединенных механизмов свободного хода (например, храпового механизма, зубчатой муфты и т.По), у которых ведущий элемент первого механизма (подпружиненная собачка 23 закреплена на рычаге 22, ведомый элемент (храповое колесо 24) связан неподвижно с ведущим элементом 25 второго механизма свободного хода, подпружиненный ведомый элемент 26 которого связан с подвижным управляющим элементом 13 пневмокрана 12.
Устройство снабжено также тормозным механизмом, включающим последовательно соединенные дополнительные пневмокран 27 и пневмопульсатор 28,
и механизм 29 привода тележки, состощий из приводного колеса 30, пневмо- камеры 31 с упругим элементом 32, взаимодействующим с механизмом свободного хода, выполненным в виде, например, храпового колеса 33, закрепленного на приводном колесе 30, и подпружиненной собачки 34, закрепленной на поворотном рычаге 35, установленном на оси храпового колеса 33 и связанном с упругим элементом 32.
Кроме того, пневмокран 27 содержит неподвижный управляющий элемент 36 с входным пневмоканалом 37, сообщающимся с вакуумной системой (не показана)и подвижный управляющий элемент 38 с кольцевым пневмоканалом 39 выходной пневмоканал 40 которого сообщается с входом пульсатора 28, а выход пульсатора сообщен с полостью пневмокамеры 31, при этом подвижный управляющий элемент 38 пневмокрана 27 жестко связан с подвижным управляющим элементом 13 пневмокрана 12 и содержит дроссель 41, предназначенный для снижения расхода воздуха в выходном пневмоканале 40 путем уменьшения рабочего сечения кольцевого пневмоканала 39 в рабочем положении подвижного управляющего элемента 13 основного пневмокрана 12, для чего дроссель 41 расположен в зоне кольцевого пневмоканала 39, примыкающей к зоне сообщения входного 37 и выходного 40 каналов пневмокрана 27 в его исходном положении.
Устройство работает следующим образом.
Пневмоканал 16 неподвижного управляющего элемента 15 пневмокрана 12 соединяется с вакуумной системой, после чего осуществляется перемещени
тележки 29 с бункером I вдоль кормущ- 45 мокрана 12 в направлении к его иски 18с Под действием упорного стерж- ходному положению.
При создании в пневмокамере 20
ня 19 при движении тележки с бункером происходит поворот рычага 17, а вместе с ним подвижного управляющего элемента 13 пневмокрана 12 на заданный угол об , в результате чего входной канал 16 неподвижного элемента 15 пневмокрана 12 сообщается с кольцевым пневмоканалом 14 подвижного
атмосферного давления в результате обратного поворота рычага 22 подпру 50 жиненная собачка 23 выходит из зацепления с храповым колесом 24, поэтому в этом случае при обратном повороте рычага 22 и вместе с ним д зирующего элемента 3 оба механизма
элемента 13, при этом в процессе по- eg свободного хода с элементами 23 - 26
ворота рычага 17 и элемента 13 ведомый элемент 26 второго механизма свободного хода поворачивается относительно ведущего элемента 25,
выключаются из работы, поэтому при обратном ходе рычага 22 дозирующего элемента З) поворота подвижного управ ляющего элемента 13 не происходит.
0
который удерживается от проворот; за счет заклинивания элементов 24 и 25 первого механизма свободного хода в результате фиксации рычага 22 при исходном положении упругого элемента 21 пневмокамеры 20.
При сообщении пневмоканалов 16 и 14 в камерах 6 и 7 пневмопульсато- ра 5 создается вакуум, под действием которого происходит деформирование мембраны 10, перемещающей шток 9, который с помощью клапана 11 зак- рывЬет камеру 7, что приводит к
5 сообщению камеры 7 через камеру 8 с атмосферой, в результате в камере 7, а значит и в пневмокамере 20 передаточного механизма, создается переменное давление (вакуум-атмосфера) в
0 течение всего времени взаимодействия пневмоканалов 16 и 14 пневмокрана 12.
Под действием переменного давления в пневмокамере 20 происходит возвратно-поступательное движение
5 упругого элемента 21, которое приводит с помощью рычага 22 и оси 4 к рабочим перемещениям дозирующего элемента 3, который через окна 2 порционно вьщает корм из бункера 1 в
0 кормушку 18 в зоне расположения упорного стержня 19,
В моменты создания пульсирующего вакуума в пневмокамере 20 при повороте рычага 22 под действием упругого
g элемента 21 ведущий элемент первого механизма свободного хода - собачка 23, закрепленная на рычаге 22, - поворачивает ведомый элемент - храповое колесо 24, в результате чего
0 происходит поворот в том же направлении ведущего 25 и ведомого 26 элементов второго механизма свободного хода и вместе с ними поворот подвижного управляющего элемента I3 пневатмосферного давления в результате обратного поворота рычага 22 подпру- 50 жиненная собачка 23 выходит из зацепления с храповым колесом 24, поэтому в этом случае при обратном повороте рычага 22 и вместе с ним дозирующего элемента 3 оба механизма
выключаются из работы, поэтому при обратном ходе рычага 22 дозирующего элемента З) поворота подвижного управляющего элемента 13 не происходит.
Таким образом, в процессе создания пневмопульсатором 5 чередующихся циклов изменения давления в пневмо- камере 20 осуществляется заданное количество циклов неремещения дози- рующего элемента 3 в течение всего времени прерывистого поворота управляющего элемента 13 пневмокрана 12 к своему исходному положению, по достижению которого пневмоканалы 16 и 14 разобщаются, что приводит к отключению пнег.мопульсатора 5 и остановке дозирующего элемента 3, число циклов работы которого, а,следователно, и количество выдаваемых доз кор- ма, определяется углом Л поворота подвижного управляющего элемента 3 (поворотного рычага 17), . продолжительностью работы пневмопуль- сатора 5 при подключении его к ваку- умной системе пневмокраном 12
Регулировка количества доз корма выдаваемых дозирующим элементом 3 в течение времени работы пульсатора 5 обеспечивается за счет установ- ки упорного стержня 19 с необходимым вычетом относительно поворотного рычага 17, что обеспечивает индивидуальную дозированную выдачу корма устройством каждому животному при перемеше}ши бункера вдоль кормушки и взаимодействии поворотного рычага 17 с каждым упорным стержнем 19 стойлового ряда.
Для обеспечения выдачи корма в заданную зону кормушки движение бункра замедляется относительно кормушки в момент работы дозирующего элемента Для этого в усовершенствованном ва- рианте устройства в исходном положении дополнительного пневмокрана 27 его входной канал 37 неподвижного управляющего элемента 36 подсоединяется к вакуумной системе и соединяет ся с кольцевым пневмсканалом 39 подвижного управляющего элемента 36, выходной пневмоканал 40 которого сообщается с входом доцолнительного пневмопульсатора 28, при работе ко- торого в пневмокамере 31 создается переменное давление, которое с помощью упругого элемента 32, подпружиненной собачки 34, поворотного рычага 35 и храпового колеса 33 пре- образуется в одностороннее вращение приводного колеса 30, обеспечивающего перемещение тележки 29 с бункером 1 вдоль кормушки 18
При повороте рычага 17 под действием упорного стержня 19 происходит смещение подвижного управляющего элемента 38 относительно неподвижного управляющего элемента 36 пневмокрана 27 на угол При этом на участке кольцевого пневмоканала 39 подвижного элемента 38 между сообщаемым с ним входным каналом 37 неподвижного элемента 36 и выходным каналом 40 подвижного элемента 38 с помощью дросселя 41 осуществляется частичное перекрытие рабочего проходного сечения кольцевого пневмоканала 39, что приводит к резкому уменьшению величины вакуума в рабочей полости пульсатора 28 в пневмокамере 31, а также к резкому снижению частоты пульсации рабочего давления дополнительного пульсатора 28, в результате чего происходит затормаживание приводного колеса 30, а значит и бункера 1 в момент поворота на угол ct, подвижных элементов 38 и 13 соответственно пневмокранов 27 и 12 в процессе времени работы дозирующего элемента 3 по выдаче в кормушку 18 заданного количества доз корма.
По окончании выдачи заданного количества доз корма рычаг 17 и подвижные управляющие элементы 13 и 38 возвращаются в исходное положение при этом дроссель 41 располагается вне зоны сообщения входного 37 и выходного 40 каналов, что приводит к восстановлению рабочего вакуума в рабочей полости нневмопульсатора 28, в результате чего скорость двил-ения возрастает до первоначального значения и тележка 29 с бункером 1 перемещается вдоль кормушки 18 к очередному стойлу.
Формула изобретения
1. Устройство для раздачи кормов, включающее бункер с выгрузными окнами, установленный на.самоходной тележке и снабженный дозирующим элементом посредством передаточного механизма, взаимодействующим с задающим элементом, о т л и ч а ю щ. е е- с я тем, что, с целью повышения точности дозирования и расширения технологических возможностей, оно снабжено задатчиком кратности выдачи дозы в виде пневмопульсатора и реле вр7
мени в виде пневмокрана с подвижной и неподвижной частью,у которого вход раз мещен на неподвижной части и сообщен с источником вакуума, а выход - на подвижной части и сообщен с входом пульсатора, выход которого посредством пневмомеханического преобразователя связан с дозирующим элементом, при этом задающий элемент закреплен на неподвижной части пневмокрана, а последний посредством механизма свободного хода связан с дозирующим элементом.
2. Устройство по П.1, о т л и ч а
ю щ е е с я тем, что тележка снабже- 15 для снижения расхода воздуха на
на тормозным устройством, выполненным в виде дополнительного пневмокрана
з н
13406858
с подвижной и неподвижнок частью, у которого вход размещен на неподвижной части и сообщен с источником ва
куума, а выход - на подвижной части, и дополнительного пневмопульсатора, вход которого сообщен с выходом дополнительного пневмокрана, а выход посредством пневмомеханического преобразователя и механизма свободного хода связан с приводным колесом тележки, при этом подвижная часть дополнительного пневмокрана жестко связана с подвижной частью основного пневмокрана и снабжена дросселем
входе дополнительного пневмопульсатора ,
Buff/i
фиг 2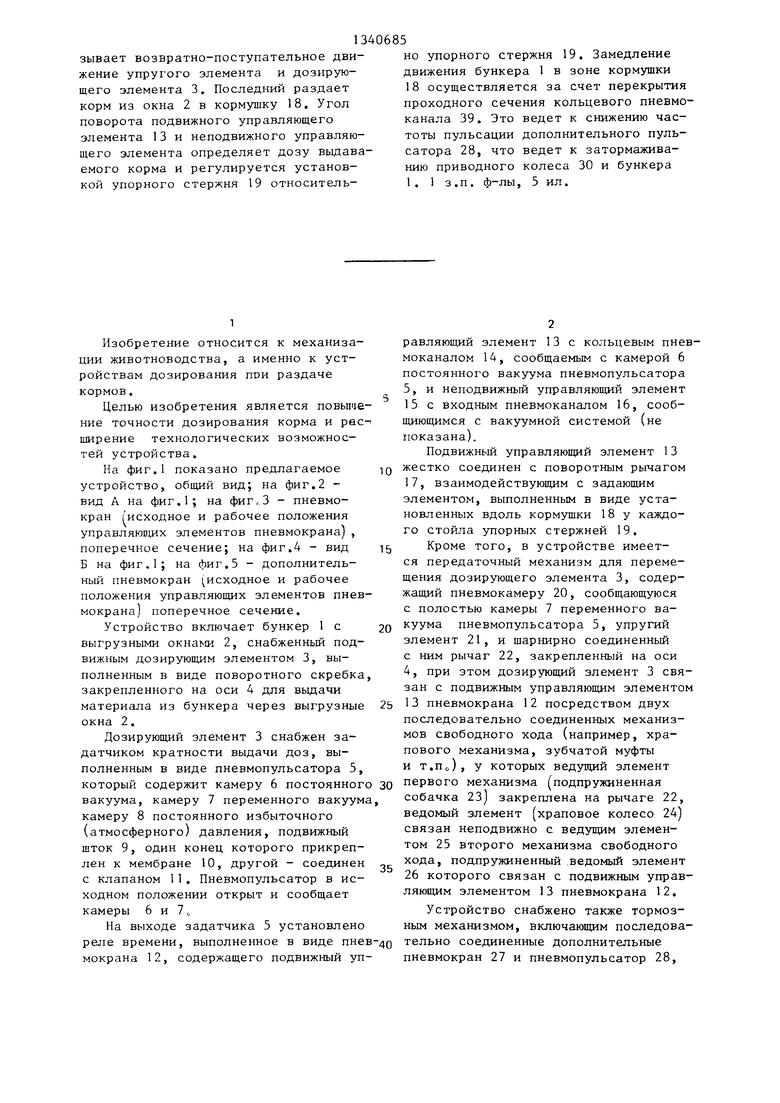

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозирования и увлажнения концентрированного корма | 1981 |
|
SU1009355A1 |
| Кормораздатчик | 1983 |
|
SU1138079A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| Станок для насекания напильников и механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента | 1981 |
|
SU1021064A1 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ КОРМОВ | 1992 |
|
RU2044475C1 |
| Кормораздатчик-дозатор для животноводческих помещений | 1989 |
|
SU1660643A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СНЯТИЯ ДОИЛЬНОГО АППАРАТА | 2001 |
|
RU2203535C2 |
| Дозатор кормов | 1977 |
|
SU704556A1 |
| ВЫСЕВАЮЩИЙ АППАРАТ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 2016 |
|
RU2624968C1 |
| Автоматическое устройство для выдачи корма животным в зависимости от объема выдоенного молока | 1981 |
|
SU967425A1 |
Изобретение относится к механизации животноводства, а именно к устройствам дозирования при раздаче кормов. Целью изобретения является повышение точности дозирования корма и расширение технологических возможностей устройства. При совмеп1ении пневмоканалов 16 и 14 в пневмокамере 20 передаточного механизма создается переменное давление, которое вы|СЛ СО о 05 оо СП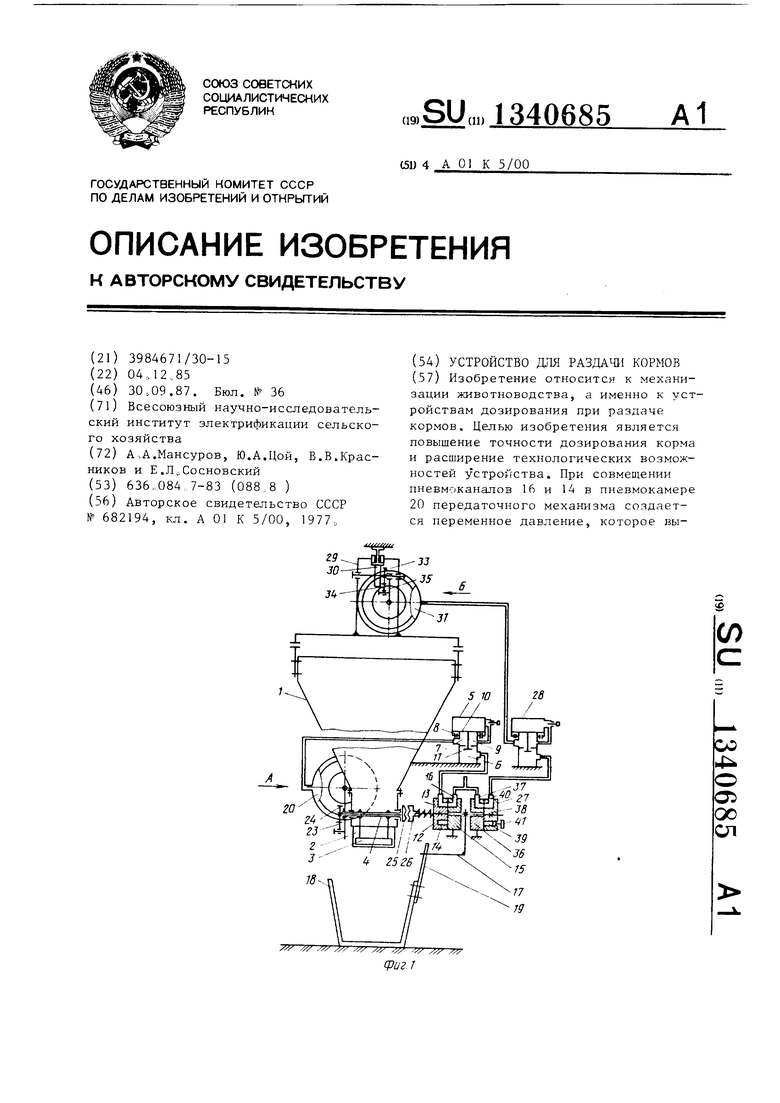
фиг.З
duffs
фиг.5
Редактор Т.,Парфенова
Составитель Л.Кузнецова
Техред М.ХоданичКорректор Г. Решетник
Заказ 4365/5
Тираж 627Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д„4/5
Производственно-полиграфическое предприятие, ГсУжгород, улс Проектная,4
| Дозатор кормов | 1978 |
|
SU682194A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
