ной собачкой, установленной на оси с подпружиненным рычагом, шарнирно соединенным с собачкой, а также зубчатого колеса, сблокированного с храповым колесом, находящегося в зацеплении с подпружиненным зубчатым сектором, соединенным с вторым рычагом, причем оба рычага связаны с упорами.
6, Механизм ориентирования обра- батьгааемой поверхности заготовки относительно инструмента, содержащий прижимную лапку, имеющую возможность поворота относительно своей оси, вкладьш для установки заготовки, расположенный в гнезде стола с цилиндрической поверхностью, отличающийся тем, что, с целью повьшения качества изделия, он снабжён регулирующим узлом, выполненным в виде двухпозиционного электроконтактного датчика, подвижная часть которого в виде стержня жестко связана с прижимной лапкой, двух электромагнитов, установленных симметрично относительно стержня и связанных с неподвижной частью датчика, причем якорь электромагнитов имеет возможность взаимодействия со стержнем.
7. Механизм ориентирования по п. 6, отли.чающийся тем, что в столе выполнены каналы для подвода воздуха к вкладышу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для насечки рашпильных барабанов (катушек) | 1939 |
|
SU59050A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ НОЖОВОЧНЫХ ПОЛОТЕН ИЛИ НАПИЛЬНИКОВ | 2004 |
|
RU2279336C2 |
| Автомат для насекания круглых надфилей | 1991 |
|
SU1816573A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Станок для насекания рашпилей прямой и полукруглой формы | 1972 |
|
SU443731A1 |
| СТАНОК ДЛЯ НАСЕКАНИЯ НАПИЛЬНИКОВ | 1933 |
|
SU35534A1 |
| Автомат для насекания надфилей | 1986 |
|
SU1360922A1 |
| Станок для насекания напильников | 1984 |
|
SU1237332A1 |
| Станок для насекания зубьев напильников | 1977 |
|
SU733893A1 |
| Станок для изготовления напильников | 1930 |
|
SU21634A1 |
1. Станок для насекания напильников, содержащий станину с направляющими, установленный на направляющих с возможностью перемещения стол, смонтированные на станине коробку подач, связанную со столом, и инструментальную головку, установленную с возможностью рабочего перемещения в вертикальной плоскости, смонтированный в головке ударный механизм, выполненный в виде молота; связанного с пружиной, механизм реакции пружины ударного механизма, привод молота, имеинций электродвигатель главного движения, кинематически связанный с коробкой подач, механизм регулирования высоты падения молота с копиром, связанным с роликом, и механизм ориентирования, обрабатываемой поверхности заготовки относительно инструмента, отличающийся тем, что, с целью .повышения качества изделий, упрощения конструкции станка и повышения производительности, он снабжен .® й й . iw-i-i- I V4 . . ..--,: Ш ;f- -:-.. , -.SSJCeSHwi смонтированным на станине механизмом управления работой молота, инструментальная головка соединена со станиной шарнирно, коробка подач связана с приводом молота посредством ременной передачи, расположенной в зоне шарнира, причем копир механизма регулирования высоты падения молота выполнен плоским, а его ролик жестко связан с инструментальной - головкой. 2.Станок по п. 1, о т л и ч аю щ и и с я тем, что он снабжен направляющими роликами, оси которых закреплены на станине, а копир установлен на роликах. 3.Станок по п. 1, о т л и ч а(Л ю щ и и с я тем, что, с целью повьш1ения компактности станка, стол установлен с возможностью перемещения в направлении к заданной стенке станины. 4.Станок по п. 1, о т л и ч а.ю щ и и с я тем, что, с целью расширения технологических возможностей, tsD механизм гашения реакции пружины выполнен в виде направляющего элемента, жестко соединенного с верхним О) концом пружины и гибкого элемента 4i неизменной длины, охватывающего направляющий элемент, при этом концы гибкого элемента зафиксированы на станине. 5.Станок по п; 1, отличающийся тем, что механизмуправления работой молота выполнен в виде упоров, установленных на столе, плиты, установленной на станине, на которой закреплен двухходовой кран, связанный с молотом и храповым колесом, взаимодействующим с подпружинен
Изобретение относится к обработке металлов давлением и станкостроению, в частности к оборудованию для производства напильников.
Механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента, кроме того, может найти применение влюбом оборудовании, предназначенном для нанесения на плоскую повр-г ность различных рельефов, например выемок, рисок, канавок и т.д.
Известен станок для насекания напильников, содержащий станину с направляющими, установленный на направляющих с возможностью перемещения стол, смонтированную на станине коробку подач, связанную со столом, и инстр /ментальную головку, установленную на станине с возможностью рабочего перемещения в вертикальной плоскости, смонтированный в головке ударный механизм, выполненный в виде молота, связанного с пружиной, механизм гашения реакции пружины ударног механизма, привод молота, имеющий электродвигатель главного движения. Кинематически связанный с коробкой подач, механизм регулирования высоты падения молота с круглым копиром, связанным с роликом, и 1еханизм ориентирования обрабатываемой поверхности заготовки относительно инструмента l .
Станок данной модели сложен по конструкции, что усложняет регулировку станка, а это в свою очередь приводит к снижению качества насекаемых напильников и снижает производительность станка.
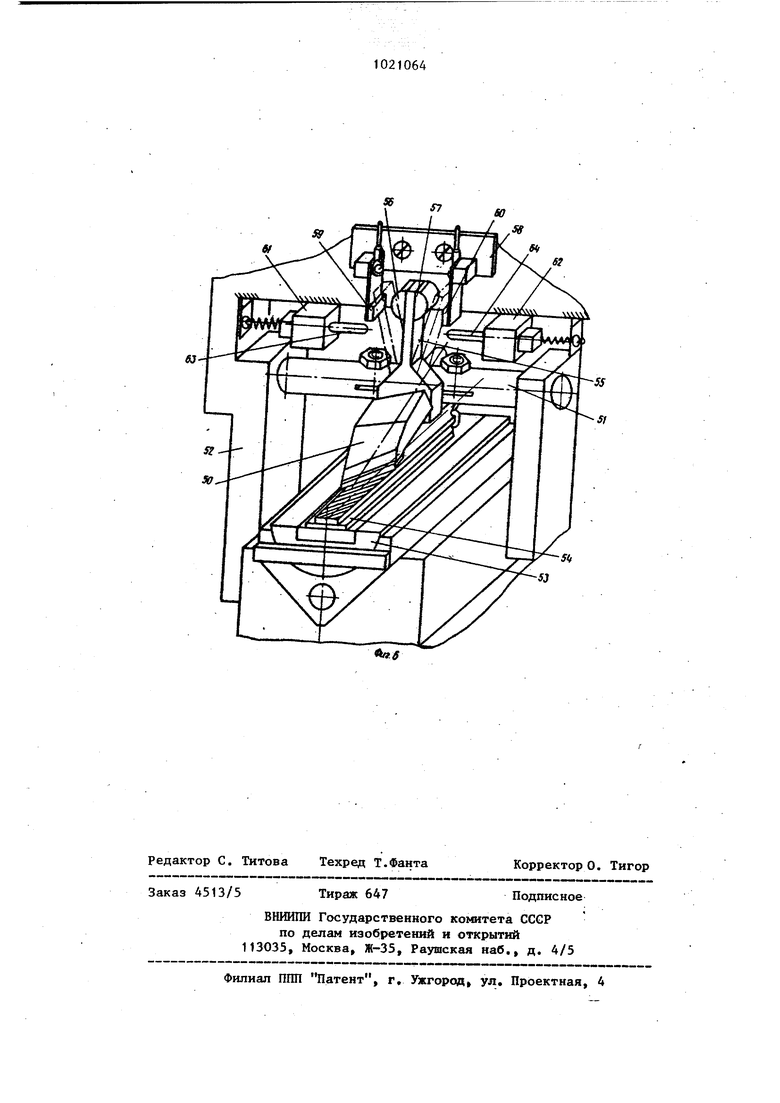
Механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента, содержит прижимную лапку, имеющую возможность поворота относительно своей оси , вкладьщ для установки заготовки, расположенный в гнезде стола с цилиндрической поверхностью.
В процессе работы лапка, скользя по заготовке, стремится развернуть насекаемую поверхность параллельно режущей кромке зубила, устраняя.таким образом дефекты плоскостности насекаемой поверхности, при этом глубина насечки по ширине заготовки будет одинаковой. Силы, реакции, действующие при этом на лапку, несимметричные относительно ее оси и носящие вибрационный характер, стремятся нарущить взаимное расположение лапки и инструмента;
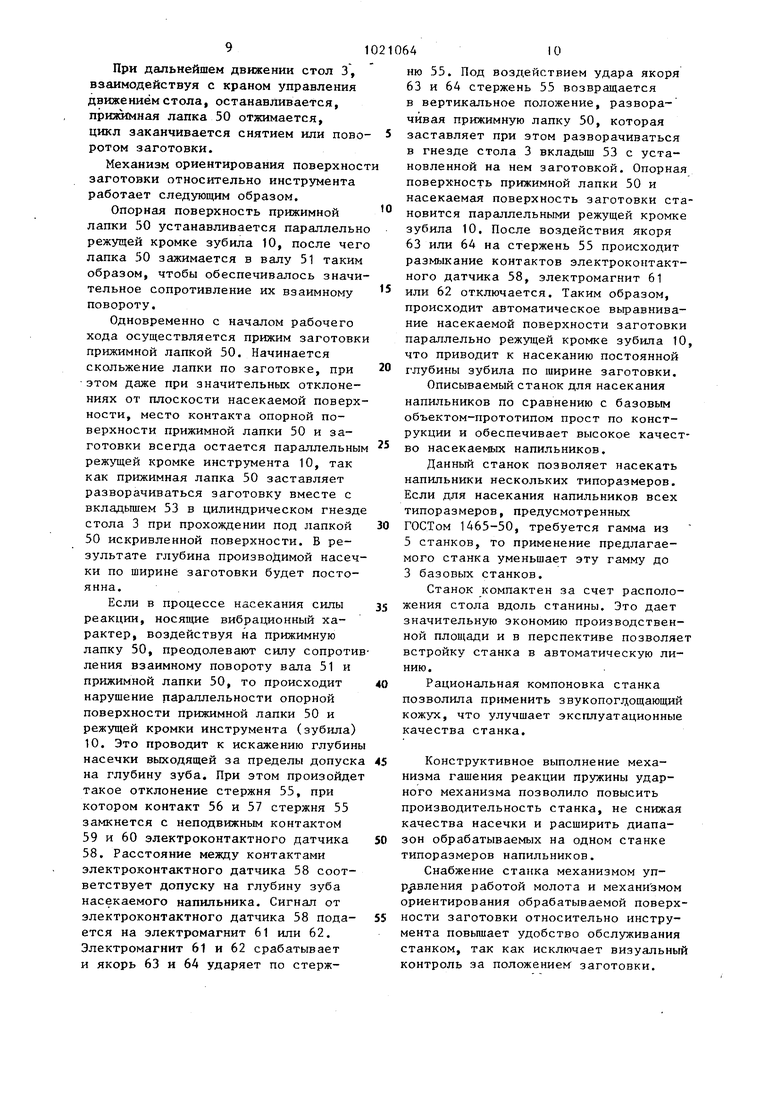
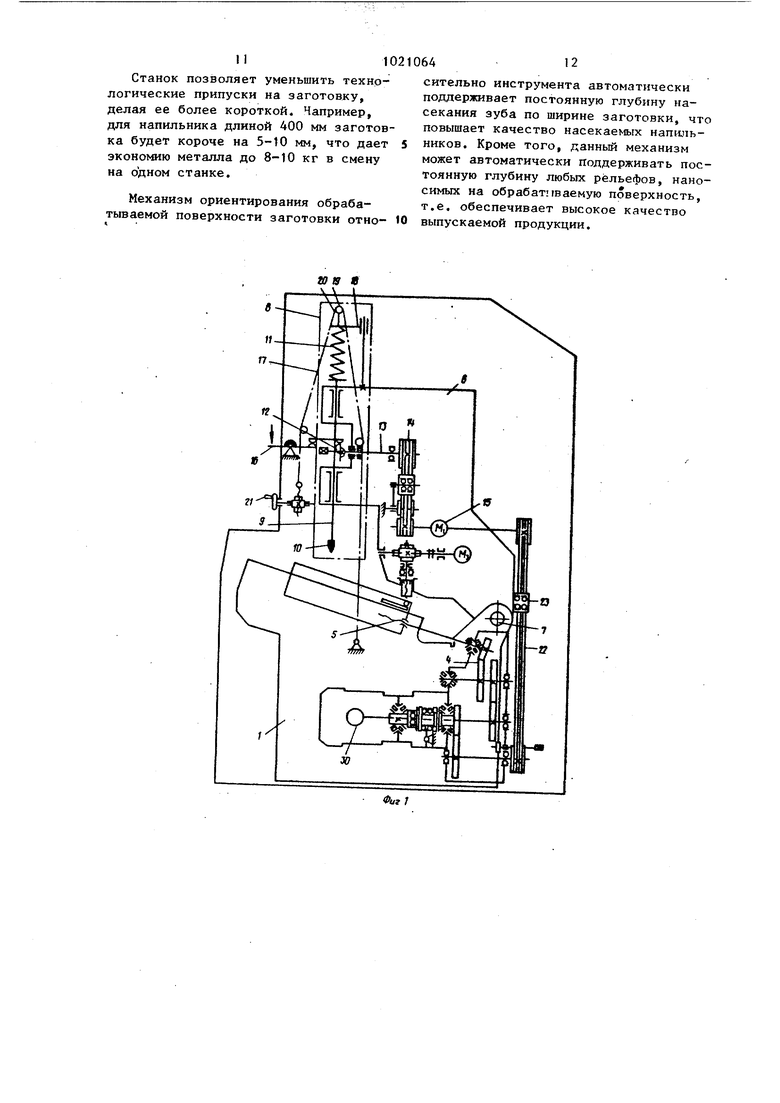
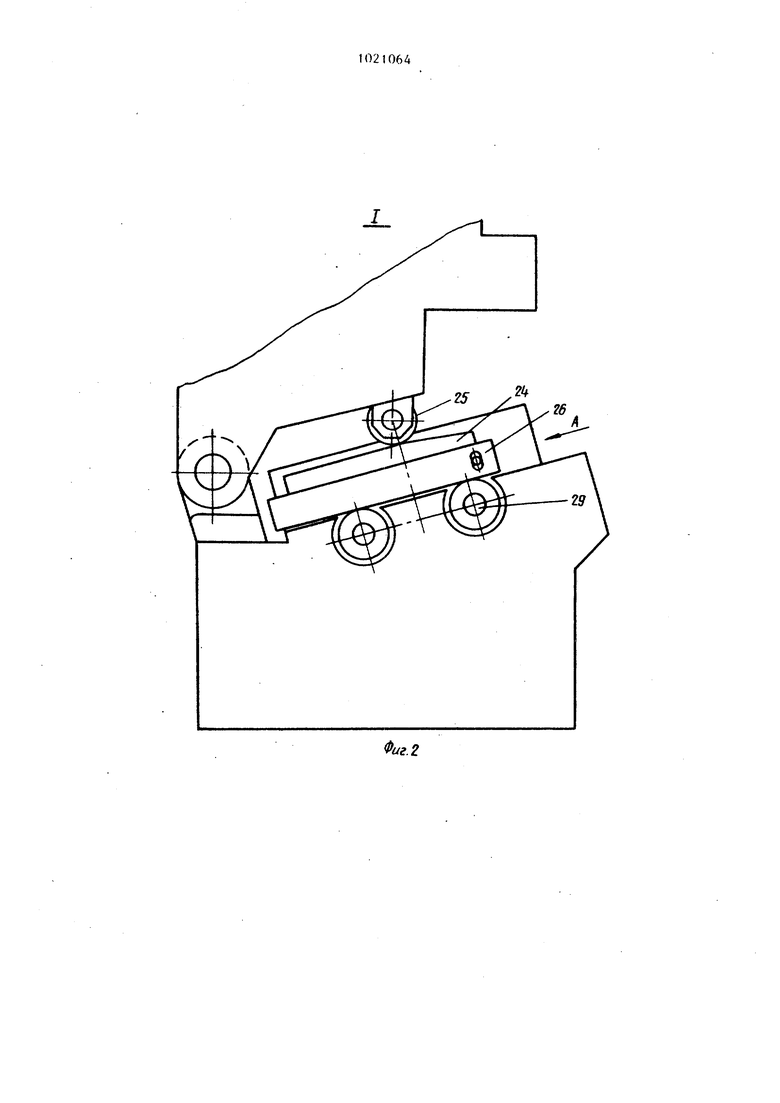
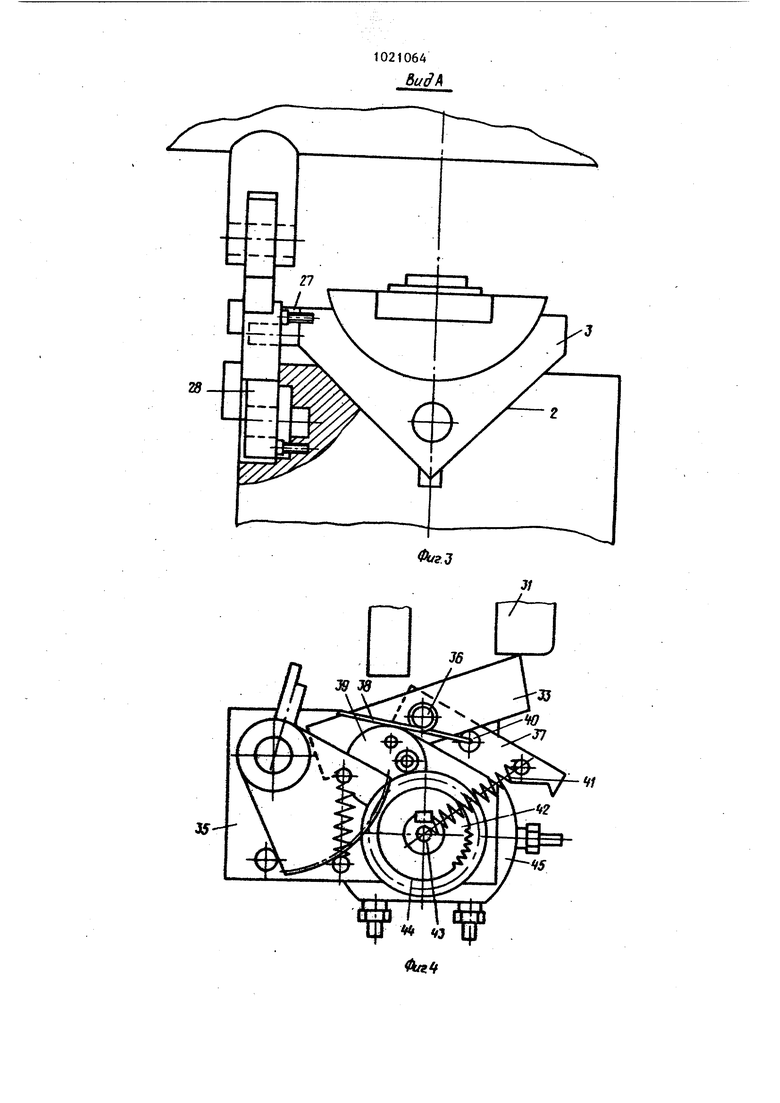
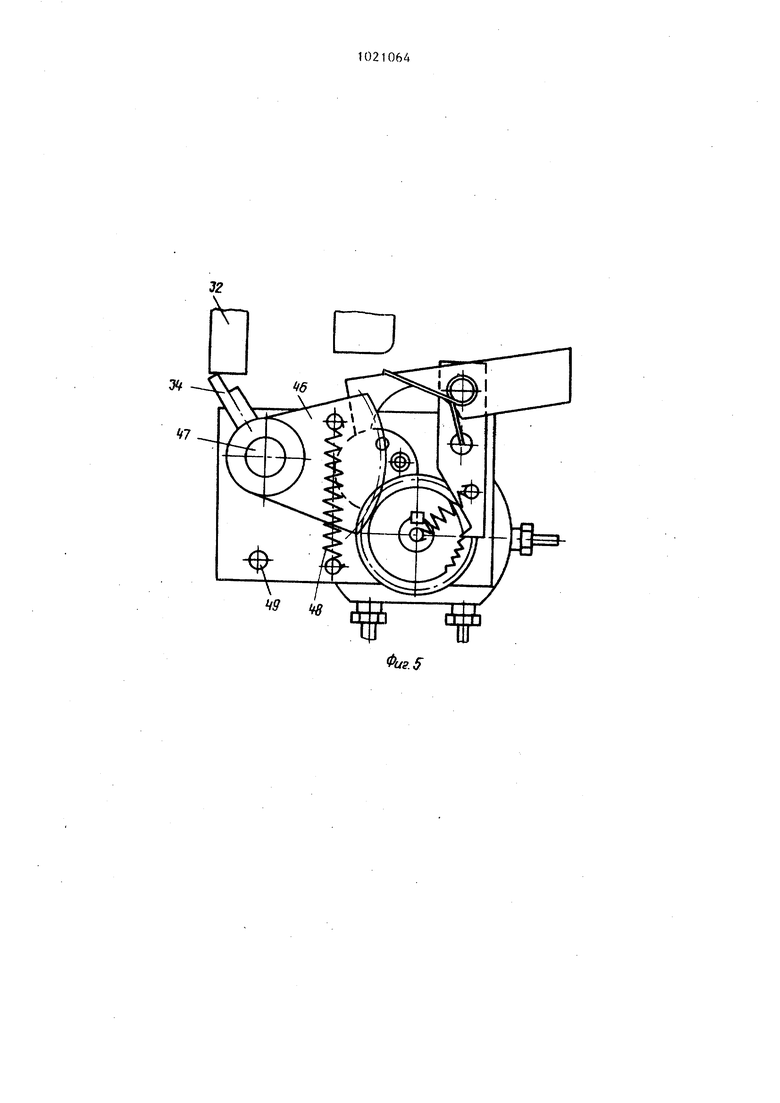
Недостатком данного механизма яф1яется то, что заклинивание вкладыша в процессе работы, а также зазоры в цепи ручного управления лапки усугубляют явление нарушения взаимного расположения лапки и инструмента. Это приводит к непостоянной глубине насекания зубьев по ширине заготовки. Это дефект определяется визуально, а исправляется путем вращения маховика прижимной лапки или постукивания по вкладьпиу, что не обеспечивает необходимого качества насекания зубьев. Цель изобретения - повышение качества изделия, упрощение конструкции станка и повьшение его производительности. Указанная цель достигается тем, что станок для насекания напильников, содержащий станину с направляющими, установленный на направляющих с возможностью перемещения стол, смонтированные на станине коробку подач, связанную со столом, и инстру ментальную головку, установленную на станине с возможностью рабочего перемещения в вертикальной плоскости смонтированный в головке ударный механизм, выполненный в виде молота, связанного с пружиной, механизм гашения реакции пружины ударного механизма, привод молота, имекнций электродвигатель главного движения, кинематически связанный с коробкой подач механизм регулирования высоты падени молота с копиром, связанным с роликом, и механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента, он снабжен смонтированньм на станине механизмом управления работой молота, инструмен тальная головка соединена со станино шарнирно, коробка подач связана с приводом молота посредством ременной передачи, расположенной в зоне шарнира, причем копир механизма регулирования высоты падения молота выполнен плоским, а его ролик жестко связан с инструментальной головкой. Станок снабжен направляияцими роликами, оси которых закреплены на станине, а копир установлен на роликах. С целью повышения компактности станка стол установлен с возможность перемещения в направлении к задней стенке станины. С целью расширения технологически возможностей станка механизм гашения реакции пружины вьшолнен в виде направляющего элемента, жестко соединен ного с верхним концом пружины и гибкого элемента неизменной длины, охватывающего направляющий элемент. при этом концы гибкого элемента зафиксированы на станине. Механизм управления работой молота выполнен в виде упоров, установленных на столе, плиты, установленной на станине, на которой закреплен двухходовой кран, связанный с молотом и храповым колесом, которая взаимодействует с подпружиненной собачкой, установленной на оси подпружиненным рычагом, шарнирно соединенным с собачкой, а также зубчатого колеса, сблокированного с храповым колесом, находящегося в зацеплении с подпружиненным зубчатым сектором, соединенным со вторым рычагом, причем оба рычага связаны с упорами. Механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента, содержащий прижимную лапку, имеющую возможность поворота относительно своей оси, вкладьш для установки заготовки расположенный в гнезде стола с цилиндрической поверхностью, снабжен регулирующим узлом, выполненным в виде двухпозиционного электроконтактного датчика, подвижная часть которого в виде стержня жестко связана с прижимной лапкой, двух электромагнитов, установленных симметрично относительно стержня и связанных с неподвижной частью датчика, причем якори электромагнитов имеют возможность взаимодействовать со стержнем. В столе выполнены каналы для подвода воздуха к вкладьппу. На фиг. 1 представлена кинематическая схема станка; на фиг. 2 механизм регулирования высоты; на фиг. 3 - вид А на фиг. 2; на фиг. 4 механизм управления работой молота в зависимости от положения стола, при закрытом положении пневмокрана; на фиг. 5 - то же, при открытом положении пневмокрана; на фиг. 6 механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента. Станок для насекания напильников содержит станину 1 коробчатой формы с призматическими направляющими 2, в которых установлен стол 3. Направлякяцие 2 расположены вдоль станины под углом 7 к горизонтальной плоскости, что соответствует углу наклона насекаемых зубьев на напильниках ПО ГОСТу 1465-80. Стол 3 связан с коробкой подач 4, расположенной в станине 1 посредством ходового винта 5, Инструментальная головка 6 через ось 7 шарнирно соединена со станиной 1. Это дает возможность инструментальной головке 6 перемещаться относительно станины 1 в вертикальной плоскости. Инструментальная головка 6 содержит ударный механизм 8, включающий молот 9с зубилом 10 установленный в направляющих инструменталь ной головки 6. На молот 9 надета пружина 11, которая сообщает молоту 9 поступательное движение на заготовку с определенной скоростью. Обратное движение от заготовки вверх, которое заряжает пружину 11, молот получает от кулачка 12, установленного на центральном валу 13, которы связан через ременную передачу 14 с валом электродвигателя главного движения 15, расположенного в инструментальной головке 6. В верхнем положении молот 9 удерживается рычагом подхвата 16. Механизм гашения реакции пружины ударного механизма включает гибкий (нерастягиваемый) элемент неизменяемой длины (цепь)17, перекинутьй через направляющий злемент, выполне ный в виде втулки 13, в которой пос редством оси 19 закреплен ролик 20 Свободные концы цепи 17 закреплены на станине 1, причем один конец имеет регулирукяцее устройство 21, служащее для изменения натяжения пружины 11. Для обеспечения постоянного шага насекаемых зубьев привод молота кин матически связан с коробкой подач 4 стола 3. Для осуществления этой свя зи электродвигатель гласного движен 15 снабжен вторым выходным валом, который посредством ременной передачи 22 связан с валом коробки подач 4. Ременная передача 22 располо жена в зоне шарнира 7 и снабжена натяжшям ролщом 23 для компенсации изменения межцентрового расстояния Механизм регулирования высоты падения молота представляет собой плоский копир 24, взаимодействующий с роликом 25, закрепленным в инстру ментальной головке 6. Копир 24 уста новлен на опоре 26, которая посредством пальца 27 связана со столом 3. Опора 26 перемещается по роликам 28, закрепленным на станине 1 посредством осей 29. Холостой ход. стола 3 осуществляется от отдельного электродвигателя 30. Управление перемещением стола 3 из позиции загрузки в рабочую позицию осуществляется пневматически. При этом стол 3 может иметь недобег или перебег относительно расчетной точки, соответствующей началу насек&ния. Для точного расположения первой и последней насечек на заготовке, станок снабжен механизмом управления работой молота. Механизм включает два регулируемых упора 31 и 32, закрепленные на столе 3 и соответствующие началу и концу насекания. Упоры 31 и 32 взаимодействуют соответственно с двумя рычагами 33 и 34, установленными на плите 35, расположенной на станине 1. Рйчаг 34 соединен осью 36 с собачкой 37 и поджат пружиной 38 к кулачку 39, задающему определенную траекторию движения рычага 34. Собачка 37 посредством оси 40 закреплена на плите 35 и с помощью пружины 41 прижата к храпо-. вому колесу 42, сблокированному с помощью оси 43 с зубчатым колесом 44 и золотником двухходового крана 45, который закреплен с нижней стороны плиты 35. Двухходовой кран 45 через пневмокамеру управляет работой рычага подхвата 16 молота 9. Зубчатое колесо 44 находится в зацеплении с зубчатым сектором 46, имеющим возможность поворота с совместно закрепленным на нем рычагом 34вокруг установленной на плите 35оси 47. Пружина 48 стремится повернуть сектор 46 до контакта с упором 49. В исходном положении угол между линией, проходящей через ось 40 собачки 37 и ось 36 с линией, соединягацей ось 36 с крайней точкой рычага 33, взаимодействующей с упором 31 близкий к 90. При таком конструктивном выполнении механизма УJ paвлeния работой молота холостой ход стола будет наименьшим. Механизм ориентирования обрабатьшаемой поверхности заготовки относительно инструмента представляет собой прижимную лапку 50, закрепленную на валу 51, установленном в кронштейне 52 станины 1 и вкладьш 53, установленный в гнезде стола 3 с цилиндрической поверхностью. При жимная лапка 50 обеспечивает прижатие заготовки, расположенной на подкладке 54 вкладыша 53. Усилие прижима осуществляется от пневматики. Механизм имеет регулирующий узел в котором стержень 55 связан с прижимной лапкой 50 и имеет два контакта 56 и 57. Стержень 55 является подвижной частью двухпозиционного электроконтактного датчика 58, имеющего два неподвижных контак та 59 и 60. Датчик 58 расположен на кронштейне 52 станины 1. В той же плоскости, что и датчик 58 симме рично относитель1 о стержня 55 на крош11тейне 52 расположены два элект ромагнита 61 и 62, имеющие соответственно якори 63 и 64. Станок работает следующим образом. После включения электродвигателя гласного движения 15 и электродвигате холостых ходов 30 через ременную передачу 14 передается вращение на центральный вал 13 с кулачком 12. Молот 9 удерживается в верхнем подхваченном положении рычагом подхвата 16. Цикл начивается с укладки заготовки напильника на подкладку 54 стола 3 и поворота крана управления движением стола, после чего весь цикл управления осуществляется авто матически. Стол 3, получая ускоренное движе ние от электродвигателя 30 через коробку подач 4 и ходовой винт 5 перемещается из зоны загрузки в начало рабочей зоны. По окончании холостого хода вклю чается рабочая подача стола 3, при этом заготовка прижимается к столу прижимной лапкой 50. Рабочая подача стола 3 осуществляется от электродвигателя главного движения 15 чере ременную передачу 22, коробку подач и ходовой винт 5.. В начале рабочего хода включаетс в работу механизм управления работо молота. Упор 31, воздействуя на рычаг 33, поворачивает собачку 37 и выводит ее из зацепления с храповым колесом 42. Не удерживаемая более 648 пружина 48 поворачивает сектор 46 до упора 49, одновременно поворачивая находящееся в зацеплении с сектором 46 зубчатое колесо 44, сблокированнее с ним храповое колесо 42 и золотник двухходового крана 45. Двухходовой кран 45 направляет воздух в соответствующую полость пневмокамеры, которая своим штоком отводит рычаг подхвата 16 молота 9, после чего молот 9 под действием пружины 11 и кулачка 12 начинает совершать возвратно-поступательное движение, нанося зубилом 10 удары по заготовке напильника, что в совокупности с равномерным движением стола-3 создает на заготовке насечки равного шага. Рычаг 33 по прошествии столом 3 некоторого пути после включения в работу молота 9, направляемый кулачком 39, выходит из зацепления с упором 31 и вместе с собачкой 37 под действием пружины 38 и 41 возвращается на исходную позицию. При переходе насекания от узкого носка к прямой части для получения одинаковой глубины насечки необходимо плавно увеличить энергию удара молота 9. Для этого плоский копир 24 имеет соответствующий подъем профиля. При движении стола 3 и связанного с ним копира 24 ролик 25 переходит с одного участка копира 24 на другой, а инструментальная головка 6 получает перемещение в вертикальной плоскости. Перемещение инструментальной головки 6 изменяет высоту падения молота 9, что приводит к изменению энергии его удара. В конце рабочего хода стола 3 упор 32, определяющий конец насекания, поворачивает рычаг 34 и связанный с ним сектор 46 вокруг оси 47, заряжая пружину 48. Находящееся в зацеплении с сектором 46 зубчатое колесо 44, а также связа шое с ним храповое колесо 42 и золотник двухходового крана 45 поворачиваются вокруг оси 43, причем собачка 37 не препятствует провороту сблокированной системы. При своем повороте золотник двухходового крана 45 направляет воздух в соответствующую полость пневмокамеры, которая своим штоком одводит рычаг 16 под молот 9 роисходит подхват золота, насечка прекращается. При дальнейшем движении стол 3, взаимодействуя с краном управления движением стола, останавливается, прияоимная лапка 50 отжимается, цикл заканчивается снятием или пово ротом заготовки. Механизм ориентирования поверхнос заготовки относительно инструмента работает следующим образом. Опорная поверхность прижимной лапки 50 устанавливается параллельн режущей кромке зубила 10, после чег лапка 30 зажимается в валу 51 таким образом, чтобы обеспечивалось значи тельное сопротивление их взаимному повороту. Одновременно с началом рабочего хода осуществляется прижим заготовк прижимной лапкой 50. Начинается скольжение лапки по заготовке, при этом Дс1же при значительных отклонениях от плоскости насекаемой поверх ности, место контакта опорной поверхности прижимной лапки 50 и заготовки всегда остается параллельны режущей кромке инструмента 10, так как прижимная лапка 50 заставляет разворачиваться заготовку вместе с вкладышем 53 в цилиндрическом гнезд стола 3 при прохождении под лапкой 50 искривленной поверхности. В результате глубина производимой насеч ки по ширине заготовки будет постоянна. Если в процессе насекания силы реакции, носящие вибрационный характер, воздействуя на прижимную лапку 50, преодолевают силу сопроти ления взаимному повороту вала 51 и прижимной лапки 50, то происходит нарушение параллельности опорной поверхности прижимной лапки 50 и режущей кромки инструмента (зубила) Ю. Это проводит к искажению глубин насечки выходящей за пределы допуск на глубину зуба. При этом произойде такое отклонение стержня 55, при котором контакт 56 и 57 стержня 55 замкнется с неподвижным контактом 59 и 60 электроконтактного датчика 58. Расстояние между контактами электроконтактного датчика 58 соответствует допуску на глубину зуба насекаемого напильника. Сигнал от злектроконтактного датчика 58 подается на электромагнит 61 или 62. Электромагнит 61 и 62 срабатывает и якорь 63 и 64 ударяет по стерж410ню 55. Под воздействием удара якоря 63 и 64 стержень 55 возвращается в вертикальное положение, разворачивая прижимную лапку 50, которая заставляет при этом разворачиваться в гнезде стола 3 вкладьш 53 с установленной на нем заготовкой. Опорная поверхность прижимной лапки 50 и насекаемая поверхность заготовки становится параллельными режущей кромке зубила 10. После воздействия якоря 63 или 64 на стержень 55 происходит размыкание контактов электроконтактного датчика 58, электромагнит 61 или 62 отключается. Таким образом, происходит автоматическое выравнивание насекаемой поверхности заготовки параллельно режущей кромке зубила 10, что приводит к насеканию постоянной глубины зубила по ширине заготовки. Описываемый станок для насекания напильников по сравнению с базовым объектом-прототипом прост по конструкции и обеспечивает высокое качество насекаемых напильников. Данный станок позволяет насекать напильники нескольких типоразмеров. Если для насекания напильников всех типоразмеров, предусмотренных ГОСТом 1465-50, требуется гамма из 5 станков, то применение предлагаемого станка уменьшает эту гамму до 3 базовых станков. Станок компактен за счет расположения стола вдоль станины. Это дает значительную экономию производственной площади и в перспективе позволяет встройку станка в автоматическую линию. Рациональная компоновка станка позволила применить зеукопогдощающий кожух, что улучшает эксплуатационные качества станка. Конструктивное выполнение механизма гашения реакции пружины ударного механизма позволило повысить производительность станка, не снижая качества насечки и расширить диапазон обрабатываемых на одном станке типоразмеров напильников. Снабжение станка механизмом упр вления работой молота и механизмом ориентирования обрабатываемой поверхности заготовки относительно инструмента повышает удобство обслуживания станком, так как исключает визуальный контроль за положением заготовки.
Станок позволяет уменьшить технологические припуски на заготовку, делая ее более короткой. Например, для напильника длиной 400 мм заготовка будет короче на 5-10 мм, что дает экономию металла до 8-10 кг в смену на одном станке.
Механизм ориентирования обрабатываемой поверхности заготовки отноп
сительно инструмента автоматически поддерживает постоянную глубину насекания зуба по ширине заготовки, что повышает качество нaceкae ьrx напапьников. Кроме того, данный механизм может автоматически поддерживать постоянную глубину любых рельефов, наносимых на обрабатшаемую поверхность, т.е. обеспечивает высокое качество выпускаемой продукции.
1021064
ЫА
ДУ-Г
К
Si
51,
53
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СТАНОК ДЛЯ НАСЕКАНИЯ НАПИЛЬНИКОВ | 0 |
|
SU164772A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
