перпендикулярным его продольной оси, и лысками в торцовой части, которая размещена в пазу сферической гайки, а регулировочная гайка выполнена с кольцевым выступом, расположенным в пазу цилиндрического пальца.
1
Изобретение относится к измерительной технике и приборостроению,, в частности к средствам для установки оптических приборов.
Известен винтовой механизм, содержащий неподвижный корпус, винт и гайку, выполненную в виде карданно.го под веса, в котором промежуточное кольцо выполнено из двух половин, охватывающих пальцы кардана. Винтовой механизм обеспечивает компенсацию возможных перекосов гайки и винта J3 процессе работы С 13,
Однако относительно большие габариты и наличие люфтов в трех сопряжениях не позволяют обеспечить точную юстировку мало1 абаритных приборов „
Наиболее близким к предлагаемому
является винтовой механизм юстиров-
ки, содержащий неподвижньш корпус, соединенный посредством двух осей, винта и шарнира с подвижной кареткой на которой расположены цанговая сферическая гайка с пазом, параллельным оси ее резьбового, отверстия , фиксирующий элемент, размещенный в корпусе каретки и пазу сферической гайки и регулировочная гайка. Шарнир выполнен в виде сферического подпятника, на который опирается винт, и тяг, соединяющих каретку с корпусом С 23.
Известное устро 1ство обеспечивает выборку люфта в резьбовом и сферическом соединениях при малых габаритах, однако достаточно сложно и обладает недостаточной точностью. Так, на точность безлюфтового замыкания винта влияет температурная деформация всех его длин, а сжатие цанговой гайки с целью компенсации люфта в резьбе неизбежно искажает характер сопряжения которое происходит не по всей резьбе а на отдельных ее участках. Кроме то
2. Механизм по п. 1, отличающий с я тем, что шарнир расположен в отверстии корпуса и выполнен в виде подвижного вкладыша и регулировочной гайки, между которыми расположен сферический подпятник винта.
П
35
5
0
40
ГО известное устройство требует высокоточного исполнения по соосности кольцевых опорных поверхностей и резьбы корпуса и регулировочной гайки. В противном случае контакт в сферичес- ком шарнире оказывается точечным, что приводит к снижению жесткости и долговечности конструкции.
Цель изобретения - повышение точности юстировки.
Поставленная цель достигается тем, что в винтовой механизм юстировки,содержащий неподвижный корпус, соединенный посредством оси, винта и шарнира с подвижной кареткой, на которой расположена сферическая гайка с пазог параллельным оси ее резьбового отверстия, фиксирующий злемент.,, размещенный в, корпусе каретки и пазу сферической гайки, и регулировочная гайка, введены подвижный вкладыш, расположенный между корпусом каретки и сферической гайкой, которая выполнена в виде двух полусфер, при этом фиксирующий злемент выполнен в виде цилиндрического пальца с пазом, перпендикулярным его продольной оси и лысками в торцовой части, которая размещена в пазу сферической гайки, а регулировочная гайка выполнена с кольцевым выступом, расположенным в пазу цилиндрического пальца.
Кроме того, шарнир расположен в отверстии корпуса и выполнен в виде подвижного вкладьппа и регулировочной гайки, между которыми расположен сферический подпятник винта.
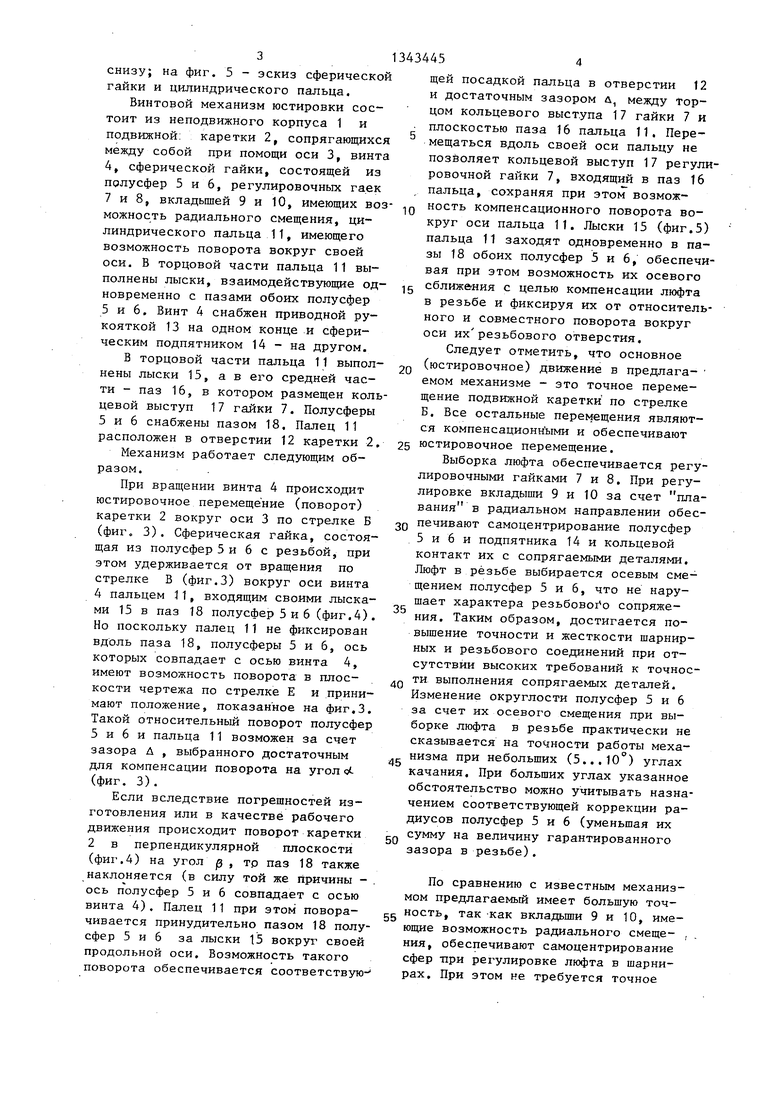
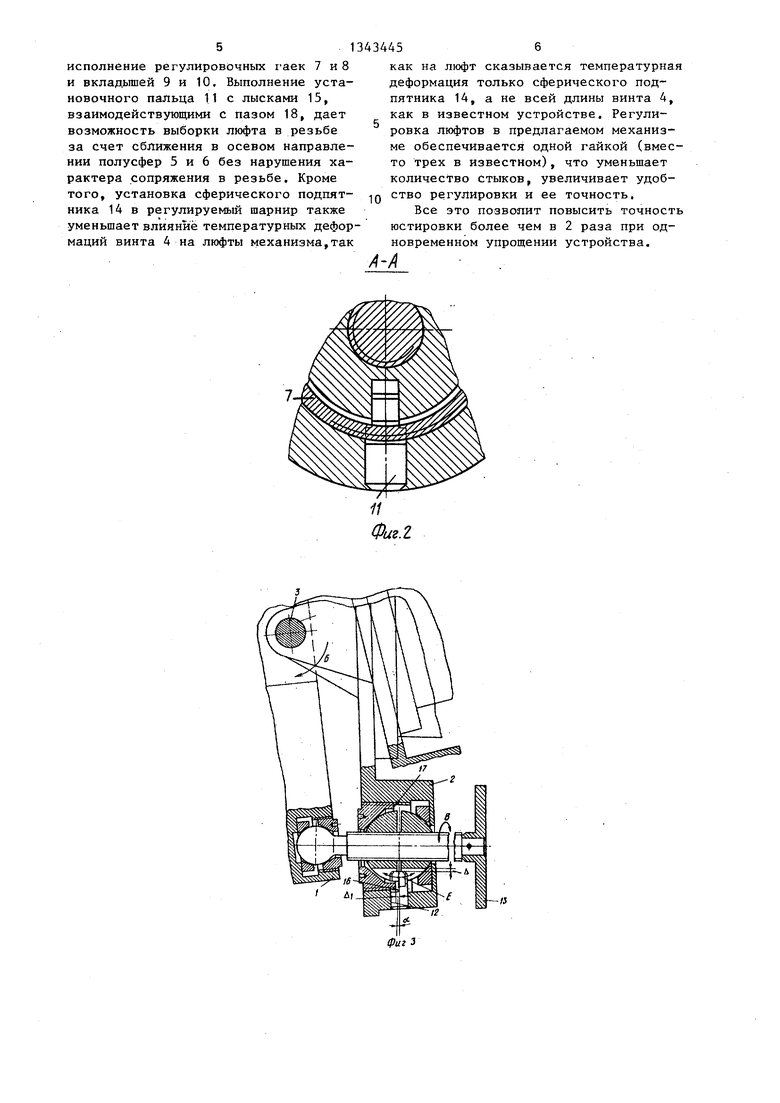
На фиг. 1 приведено устройство, сечение в плоскости оси винта; на фиг, 2 - разрез А-А на фиг, 1; на фиг. 3 - устройство, стрелками показано направление перемещения его элементов; на фиг. 4 - то же, вид
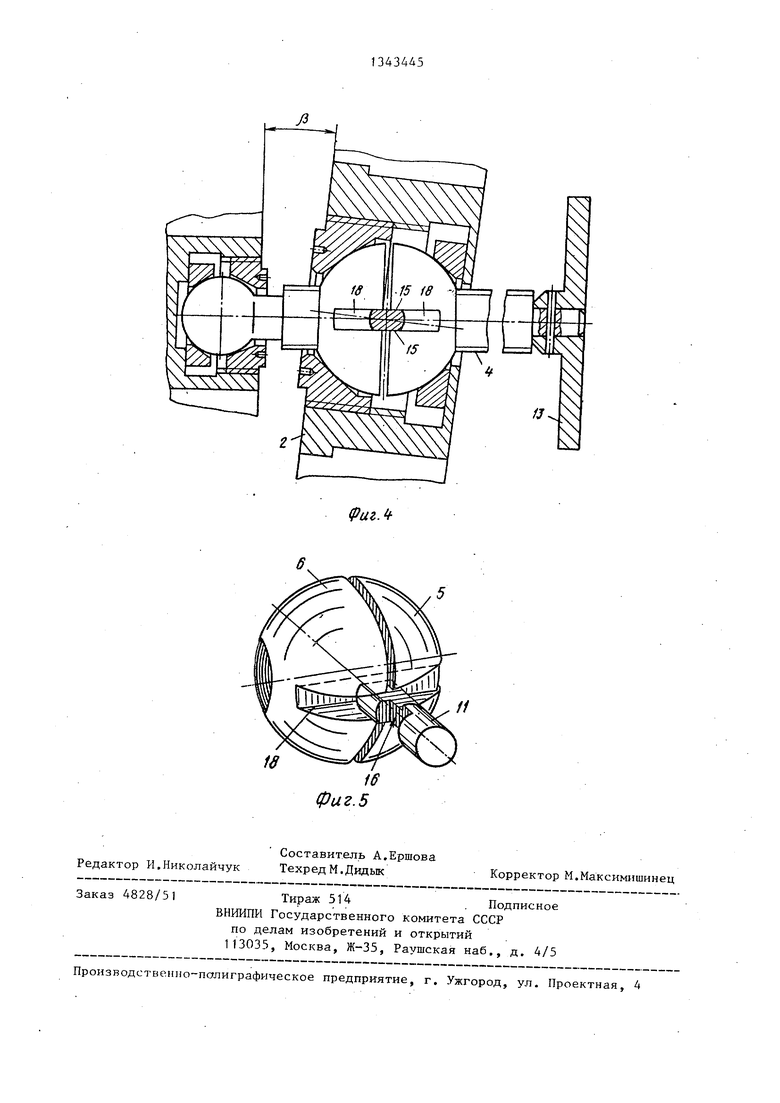
снизу; на фиг. 5 - эскиз сферической гайки и цилиндрического пальца.
Винтовой механизм юстировки состоит из неподвижного корпуса 1 и подвижной: каретки 2, сопрягающихся между собой при помощи оси 3, винта 4, сферической гайки, состоящей из пдлусфер 5 и 6, регулировочных гаек 7 и 8, вкладышей 9 и 10, имеющих возможность радиального смещения, цилиндрического пальца 11, имеющего возможность поворота вокруг своей оси. В торцовой части пальца 11 выполнены лыски, взаимодействзпющие одновременно с пазами обоих полусфер 5 и 6. Винт 4 снабжен приводной рукояткой 13 на одном конце и сферическим подпятником 14 - на другом.
В торцовой части пальца 11 выполнены лыски 15, а в его средней части - паз 16, в котором размещен кольцевой выступ 17 гайки 7. Полусферы 5 и 6 снабжены пазом 18. Палец 11 расположен в отверстии 12 каретки 2,
Механизм работает следующим образом.
При вращении винта 4 происходит юстировочное перемещение (поворот) каретки 2 вокруг оси 3 по стрелке Б (фиг. 3). Сферическая гайка, состоящая из полусфер 5 и 6 с резьбой, при этом удерживается от вращения по стрелке В (фиг.З) вокруг оси винта
4пальцем 11, входящим своими лыска- ми 15 в паз 18 полусфер 5 и 6 (фиг.4). Но поскольку палец 11 не фиксирован вдоль паза 18, полусферы 5 и 6, ось которых совпадает с осью винта 4, имеют возможность поворота в плоскости чертежа по стрелке Е и принимают положение, показанное на фиг.З. Такой относительный поворот полусфер
5и 6 и пальца 11 возможен за счет зазора Д , выбранного достаточным для компенсации поворота на угол (фиг. 3).
Если вследствие погрешностей изготовления или в качестве рабочего движения происходит поворот каретки 2 в перпендикулярной плоскости (фиг.4) на угол (З тр паз 18 также наклоняется (в силу той же причины - ось полусфер 5 и 6 совпадает с осью винта 4). Палец 11 при этом поворачивается принудительно пазом 18 полусфер 5 и 6 за лыски 15 вокруг своей продольной оси. Возможность такого поворота обеспечивается соответствую0
5
0
щей посадкой пальца в отверстии 12 и достаточным зазором л, между Торцом кольцевого выступа 17 гайки 7 и плоскостью паза 16 пальца 11. Перемещаться вдоль своей оси пальцу не позволяет кольцевой выступ 17 регулировочной гайки 7, входящий в паз 16 пальца, сохраняя при этом возможность компенсационного поворота вокруг оси пальца 11. Лыски 15 (фиг.5) пальца 11 заходят одновременно в пазы 18 обоих полусфер 5 и 6, обеспечивая при этом возможность их осевого сближения с целью компенсации люфта в резьбе и фиксируя их от относительного и совместного поворота вокруг оси их резьбового отверстия.
Следует отметить, что основное (юстировочное) движение в предлага- емом механизме - это точное перемещение подвижной каретки по стрелке Б. Все остальные перемещения являются компенсационными и обеспечивают 5 юстировочное перемещение.
Выборка люфта обеспечивается регулировочными гайками 7 и 8. При регулировке вкладыши 9 и 10 за счет плавания в радиальном направлении обес- Q печивают самоцентрирование полусфер 5 и 6 и подпятника 14 и кольцевой контакт их с сопрягаемыми деталями. Люфт в резьбе выбирается осевым сме-- щением полусфер 5 и 6, что не нарушает характера резьбовог о сопряжения. Таким образом, достигается повышение точности и жесткости шарнирных и резьбового соединений при отсутствии высоких требований к точности выполнения сопрягаемых деталей. Изменение округлости полусфер 5 и 6 за счет их осевого смещения при выборке люфта в резьбе практически не сказывается на точности работы меха5
0
45
50
55
низма при небольших (5...10 ) углах качания. При больших углах указанное обстоятельство можно учитывать назначением соответствующей коррекции радиусов полусфер 5 и 6 (уменьшая их сумму на величину гарантированного зазора в резьбе).
По сравнению с известным механизмом предлагаемый имеет большую точность, так как вкладьшги 9 и 10, имеющие возможность радиального смеще- НИЛ, обеспечивают самоцентрирование сфер -при регулировке люфта в шарнирах. При зтом не требуется точное
51
исполнение регулировочных гаек 7 и 8 и вкладьтей 9 и 10. Выполнение установочного пальца 11 с лысками 15, взаимодействующими с пазом 18, дает возможность выборки люфта в резьбе за счет сближения в осевом направлении полусфер 5 и 6 без нарушения характера сопряжения в резьбе. Кроме того, установка сферического подпятника 14 в регулируемый шарнир также уменьшает влияние температурных дефор маций винта 4 на люфты механизма,так
43445б
как на люфт сказывается температурная деформация только сферического подпятника 14, а не всей длины винта 4, как в известном устройстве. Регулировка люфтов в предлагаемом механизме обеспечивается одной гайкой (вместо трех в известном), что уменьшает количество стыков, увеличивает удоб- 0 ство регулировки и ее точность.
Все это позволит повысить точность юстировки более чем в 2 раза при одновременном упрощении устройства.
-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для юстировки оптических элементов,преимущественно зеркал | 1983 |
|
SU1155978A1 |
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
| Юстировочное устройство | 1990 |
|
SU1705790A1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2729953C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И ЮСТИРОВКИ ПРИБОРА В ТРЕХ ПЛОСКОСТЯХ | 2003 |
|
RU2234171C1 |
| Юстировочное устройство | 1989 |
|
SU1742765A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ГАЗОРАЗРЯДНОЙЛАМПЫ | 1971 |
|
SU436209A1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| Устройство для юстировки оптических элементов | 1983 |
|
SU1092457A1 |

-
(риг.
W
фиг. 5
Редактор И.Николайчук
Составитель А.Ершова Техр ед М. Дидык
Заказ 4828/51
Тираж 514Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
ПроизводстЕ ен 1о-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор М.Максимишинец
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Литвин Ф.Л | |||
| Справочник конструктора точного приборостроения | |||
| - М.: Машиностроение, 1964, с | |||
| Приспособление для автоматического показывания реклам | 1918 |
|
SU883A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник конструктора оптико-механических приборов./Под ред | |||
| В.А.Панова | |||
| -Л.: Энергия, 1980, с | |||
| Катодный усилитель | 1923 |
|
SU492A1 |
