Изобретение предназначено для настройки волоконно-оптических датчиков физических величин с многопроходным чувствительным элементом с разнесенными по оси в пространстве входом и выходом.
Известно двухкоординатн-ое юстиро- вочное устройство, содержащее неподвижно закрепленное основание, связанное с помощью шарнира с промежуточной пластиной, несущую пластину, связанную с помощью шарнира с промежуточной пластиной, а также два регулировочных механизма, один из которых взаимодействует с основанием и промежуточной пластиной, а другой - с промежуточной и несущей пластинами, при этом оба регулировочных механизма размещены на концах пластин, противолежащих концам, соединенным шарнирно, а юстируемый объект размещен на несущей пластине между шарнирами, кроме того, промежуточная и несущая пластины смещены в одну сторону относительно основания так, что оба регулировочных механизма размещены по одну сторону от
юстируемого объекта, основание размеще но между несущей и промежуточной пластинами, несущая пластина с промежуточной и основание с промежуточной пластиной подпружинены между собой.
Недостатком устройства является ограниченные функциональные возможное -л из-за малого числа степеней свободы юстировки,
Наиболее близким к изобретению является котировочное устройство, преимущественно для призм, содержащее корпус, размещенные в нем столик для оптического элемента и регулирующий механизм, столик выполнен в виде рамки и размещен в двух упорных центрах, установленных с возможностью поперечного перемещения и снабженных на торцах подпятниками, контактирующими со стопорными винтами через компенсационную пружину, а регулирующий механизм состоит из узла качания и двух узлов прямолинейного перемещения, каждый из которых выполнен в виде двух шатунов, шарнирно связанных одними кон(Л
ю XJ
Os
ел
цами с соответствующим упорным центром, а другими - с шатунными пальцами, размещенными в пазах корпуса, оси которых перпендикулярны одна другой, при этом шатунные пальцы кинематически связаны с регулировочными винтами, а узел качания выполнен в виде закрепленного на торце рамки сферич його сегмента с центром сферы, совпадающим с серединой оси между упорными центрами, и фрикционного колеса, закрепленного на шарнирно установленной в корпусе валу, снабженном рукояткой вращения, подпружиненного к сегменту и контактирующего со сферическим концом винтового фиксатора.
Недостатком его являются ограниченные функциональные возможности из-за малого числа степеней юстировки.
Цель изобретения - расширение функциональных возможностей и получение max.max. настраиваемого сигнала.
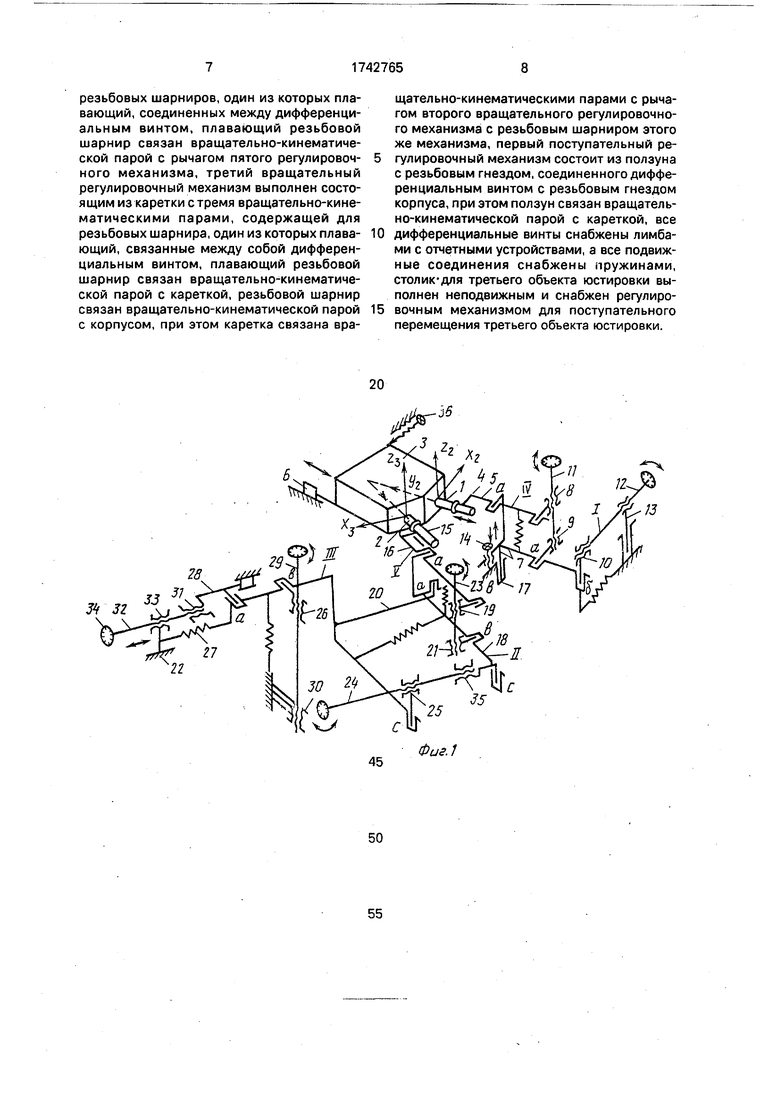
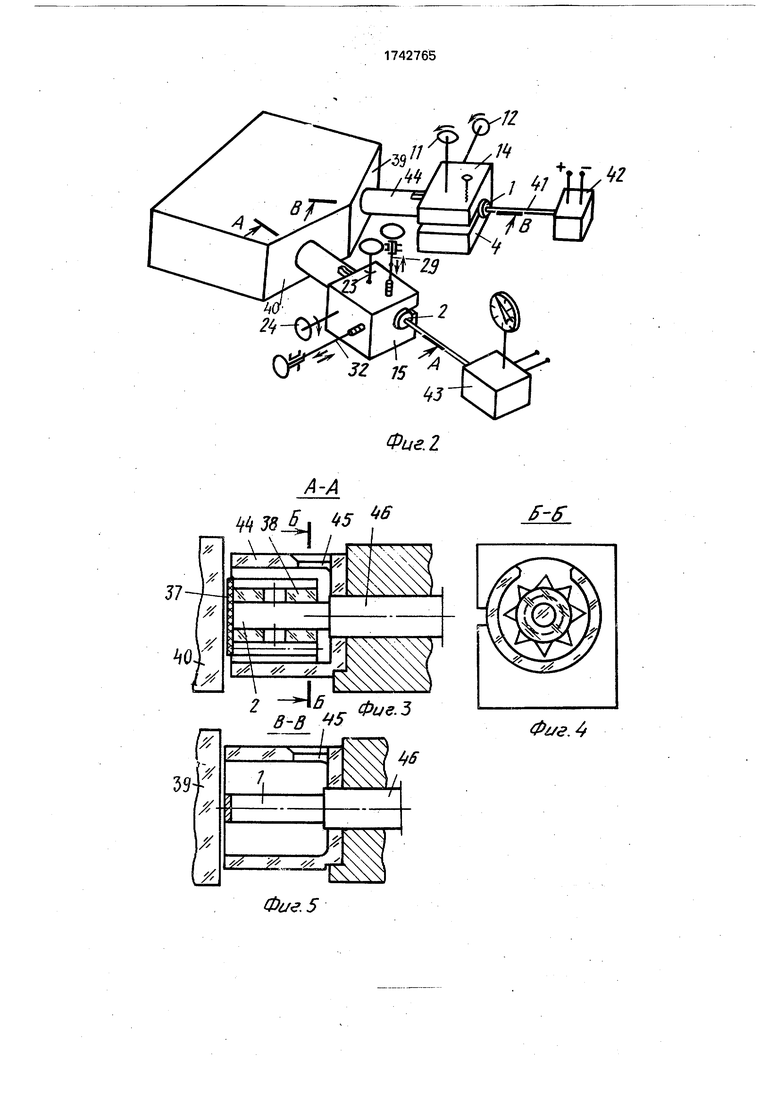
На фиг. 1 представлена кинематическая схема юстировочного устройства; на фиг. 2 - общая схема устройства для настройки волоконно-оптического датчика; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 2,
На схеме обозначены первый 1, второй 2 и третий 3 объекты юстировки.
Четвертый вращательный регулировочный механизм IV состоит из зажима 4 держателя 8 первого объекта юстировки, рычага 5, плавающего резьбового соединения 8 и резьбового соединения 9, дифференциального винта 11, при этом резьбовые соединения 8 и 9 соединены между собой дифференциальным винтом 11, а плавающий резьбовой шарнир 8 связан с рычагом 5 вращательно-кинематической парой.
Пятый вращательный регулировочный механизм V состоит из зажима 15 держателя второго объекта юстировки, рычага с двумя вращательно-кинематическими парами, двух резьбовых шарниров 19 и 21, шарнир 19 - плавающий, дифференциального винта 23, при этом резьбовые шарниры соединены между собой дифференциальным винтом 23, резьбовой плавающий шарнир 19 соединен вращательно-кинематической парой с рычагом 16.
Первый вращательный регулировочный механизм I состоит из рычага 7 с двумя вращательно-кинематическими парами и одной поступательно-вращательной кинематической парой, двух резьбовых шарниров 10 и 13, из них шарнир 10 - плавающий, дифференциального винта 12, при этом резьбовые шарниры 10 и 13 связаны дифференциальным винтом 12, резьбовой шарнир 13 связан вращательно-кинетической парой
б с корпусом 22, плавающий резьбовой шарнир 10 связан вращательно-кинематической парой с рычагом 7, резьбовой шарнир 9 четвертого вращательного регулировочного механизма связан вращательно-кинематической парой с рычагом 7, второй конец рычага 7 этого механизма связан вращательно-кинематической парой рычагом 5 четвертого регулировочного вращательного
0 механизма, а третий конец связан поступательно-вращательной кинематической парой 17 с корпусом 22 и через вращательно-постунательный механизм, состоящий из резьбового соединения и вин5 та 14, связан с корпусом.
Второй вращательный регулировочный механизм II содержит рычаг 18 с тремя вращательно-кинематическими парами, два резьбовых шарнира 25 и 35, из них шарнир
0 35 - плавающий, дифференциальный винт 24, соединяющий эти резьбовые шарниры, плавающий резьбовой шарнир 35 связан вращательно-кинематической парой с этим рычагом 18, который также связан враща5 тельно-кинематической парой с рычагом 16 пятого регулировочного механизма.
Третий вращательный регулировочный механизм IH содержит каретку 20 с тремя вращательно-кинематическими парами, два
0 резьбовых шарнира 26 , 30, шарнир 26 - плавающий, дифференциальный винт 29, связывающий эти резьбовые шарниры, плавающий резьбовой шарнир 26 связан вращательно-кинематической парой с
5 корпусом, каретка 20 связана вращательно- кинематическими парами с рычагом 16 и резьбовым шарниром 25 второго вращательного регулировочного механизма.
Первый поступательный регулировоч0 ный механизм состоит из ползуна 28 с резьбовым шарниром 31, дифференциального винта 32, соединяющего резьбовой шарнир с резьбовым гнездом 33 корпуса 34, при этом ползун 28 связан зращательно-кине5 матической парой с кареткой 20, все дифференциальные винты 11, 12, 23, 24, 29 и 32 снабжены лимбами с отсчетными устройствами, все подвижные соединения - пружинами 27, столик для третьего объекта
0 юстировки выполнен неподвижным и снабжен регулировочным механизмом 36 для по- ступательного перемещения третьего объекта юстировки.
Устройство для настройки волоконно5 оптического датчика (фиг. 2) содержит линейный поляризатор 37, зубчатую муфту 38 с приклеенным поляризатором 3, зажимы 4 и 15 четвертого и пятого вращаыльных регулировочных механизмов соответственно, подводящий волоконный световод 41, источник 42 оптического излучения, фотоприемник 43 с осциллографом, ванночку 44, отверстие 45 для залива клея в ванночку, стеклянные втулки 46, входную 39 и выходную 40 грани чувствительного элемента 3. Предварительно входную 1 и выходную 2 линзы помещают в стеклянные втулки 46.
Настройка волоконно-оптического датчика электрического или магнитного полей осуществляется следующим образом.
Волоконно-оптический датчик состоит из последовательно оптически связанных входной градиентной линзы, циркулярного поляризатора (в случае Е поля) или линейного поляризатора (в случае Н поля), чувствительного элемента в виде специальным образом ориентированного и обработанного кристалла линейного поляризатора выходной градиентной цилиндрической линзы. Градиентные цилиндрические линзы связаны с источником излучения и регистратором волоконными световодами.
Предварительно входную и выходную линзы помещают в стеклянные втулки и заливают клеем, приклеивают к торцам линз 1 и 2 соответствующие поляризаторы, устанавливают все элементы в соответствии со схемой фиг. 2. Затем подают на входную линзу 1 модулированное, например с частотой f 1100 Гц, оптическое излучение от источника 42 на экране, размещенном между выходной гранью 40 чувствительного элемента 3 и винтами 11, 12 и 14, получают сигнал максимальной яркости и фиксируют для контроля положение отсчетов устройств лимбов винтов 11, 12 и 14. Совмещают пятно оптического излучения на входной грани чувствительного элемента 3 с торцом линзы 2 и с помощью винтов 23, 24, 29, 32 и 36 с фиксацией отсчетов их лимбов получают максимальный отклик н фотоприемнике 43, выделяя усилителем сигнал на f 1100 Гц. Последовательно винтами 11, 12, 14, 23, 24, 29 и 32 получают светопропускания всего тракта передачи. Возбуждают кристалл 3 напряжением конденсатора в случае датчика электрического поля или током индуктивности в случае датчика магнитного поля величиной, равной 0,05-0,2 от максимума расчетной измеряемой величины, например, на частоте 300 Гц. Максимум измеряемой величины определяется расчетом с учетом геометрии чувствительного элемента и злектрооптической (магнитооптической) константы чувствительного элемента. Диапазон (0,05-0,2) от максимального, с одной стороны, обеспечивает достаточное отношение сигнал/шум (около 10), с другой соответствует линейному участку модуляционной характеристики чувствительного элемента (как правило, для электрооптического, или магнитооптического чувствительного элемента модуляционная характеристика - синусоида) при малой глубине модуляции.
Это позволяет настроить волоконно-оптический датчик на максимальную чувствительность.
Формула изобретения Юстировочное устройство, содержащее
0 корпус с размещенным на нем столиком и четыре регулировочных механизма, один из которых поступательный, а три- вращательные, отличающееся тем, что, с целью расширения функциональных возможно5 стей и повышения точности юстировки, в устройство введены четвертый и пятый вращательные регулировочные механизмы и второй поступательный механизм, при этом четвертый вращательный регулировочный
0 механизм состоит из зажима держателя первого объекта юстировки, рычага с двумя вращательно-кинематическими парами, двух резьбовых шарниров, один из которых плавающий, соединенных между собой диф5 ференциальным винтом, при этом резьбовой плавающий шарнир связан вращательно-кинематической парой с рычагом, пятый вращательный регулировочный механизм состоит из зажима держателя вто0 рого объекта юстировки, рычага с двумя вра- щательно-кинематическими парами двух резьбовых шарниров, один из которых плавающий, связанный между собой дифференциальным винтом, при этом резьбовой
5 плавающей шарнир связан вращателььо- кинематпческой парой с этим рычагом, а первый вращательный регулировочный механизм выполнен состоящим из рычага с двумя вращательно-кинематическими пара0 ми, двух резьбовых шарниров, один из которыхплавающий,связанный дифференциальным винтом, резьбовой шарнир связан вращательно-кинематической парой с корпусом, а плавающий резьбовой
5 шарнир связан вращательно-кинематической парой с рычагом, резьбовой шарнир четвертого вращательного регулировочного механизма связан вращательно-кинематической парой с рычагом первого вращательного ре0 гулировочного механизма, второй конец рычага этого механизма связан вращательно-кинематической парой с рычагом четвертого регулировочного механизма, третий конец этого рычага связан с корпу5 сом через поступательно-вращательную кинематическую пару и через второй поступательный регулировочный механизм, второй вращательный регулировочный механизм выполнен из рычага с тремя вращательно-кинематическими парами, двух
резьбовых шарниров, один из которых плавающий, соединенных между дифференциальным винтом, плавающий резьбовой шарнир связан вращательно-кинематиче- ской парой с рычагом пятого регулировочного механизма, третий вращательный регулировочный механизм выполнен состоящим из каретки стремя вращательно-кине- матическими парами, содержащей для резьбовых шарнира, один из которых плавающий, связанные между собой дифференциальным винтом, плавающий резьбовой шарнир связан вращательно-кинематиче- ской парой с кареткой, резьбовой шарнир связан вращательно-кинематической парой с корпусом, при этом каретка связана вра0
5
щательно-кинематическими парами с рычагом второго вращательного регулировочного механизма с резьбовым шарниром этого же механизма, первый поступательный регулировочный механизм состоит из ползуна с резьбовым гнездом, соединенного дифференциальным винтом с резьбовым гнездом корпуса, при этом ползун связан вращательно-кинематической парой с кареткой, все дифференциальные винты снабжены лимбами с отчетными устройствами, а все подвижные соединения снабжены пружинами, столик-для третьего объекта юстировки выполнен неподвижным и снабжен регулировочным механизмом для поступательного перемещения третьего объекта юстировки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для юстировки оптических элементов | 1989 |
|
SU1674041A1 |
| Устройство для юстировки катодов электронного эмиссионного микроскопа | 1981 |
|
SU970509A1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| Устройство для измерения индикатрисы источника излучения и рассеяния образцов при воздействии на них пучков излучения | 1990 |
|
SU1770771A1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2029325C1 |
| Двухкоординатное юстировочное устройство | 1985 |
|
SU1434387A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2005 |
|
RU2336545C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Двухкоординатное юстировочное устройство | 1985 |
|
SU1296982A1 |
Использование: настройка волоконно- оптических датчиков физических величин с многопроходным чувствительным элементом с разнесенными по оси в пространстве входом и выходом. Сущность изобретения: введены дополнительно четвертый и пятый регулировочные вращательные механизмы и второй вращательно-поступательный механизм. 5 ил.
Я 31
45
Фиг.1
А-А
VtftJL 5
П /
2
Фиг. 2
Ъ6
Ј-Ј
.4
| Двухкоординатное юстировочное устройство | 1985 |
|
SU1434387A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Юстировочное устройство | 1985 |
|
SU1269071A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
