ке и вычислительной технике и может быть использовано для управления комплексами, состоящими из манипуляторов и механических прессов.
Цель изобретения - повьшление точности позиционирования.
На фиг. 1 показана структурная
схема устройстваJ на фиг. 2 - времен- ю поступают на вход обратного счета
ные диаграммы работы узлов и блоков устройства; на фиг. 3 - пример конкретного конструктивного выполнения блока коррекции по скорости.
Устройство содержит генератор 1 импульсов, первый и второй распределители 2 и 3, блок 4 задания, формирователи 5 импульсов, делитель 6 частоты, третий элемент И 7, второй элесчетчика 21.
Триггеры 10 формирователей 5 импульсов устанавливаются в единичное состояние сигналами с выходов перво- 15 го распределителя 2 и подачей единичного сигнала на вторые входы первых элементов И 11 и дают разрешение на прохождение сигналов через эту схему с блока задания программ до достижемент И 8, координатно-чувствительный 20 ия заданного числа (комбинаций) имдатчик 9, вторые триггеры 10, первые элементы И 11, генератор 12 опроса, координатно-чувствительный приемник 13, преобразователь 14 видиосигнал- импульс, первьш триггер 15, элемент НЕ 16, объект 17 управления, третий триггер 18, четвертый и пятый 19, 20 элементы И, реверсивный счетчик 21, группу элементов И 22, блок 23 коррекции по скорости, сумматор 24.
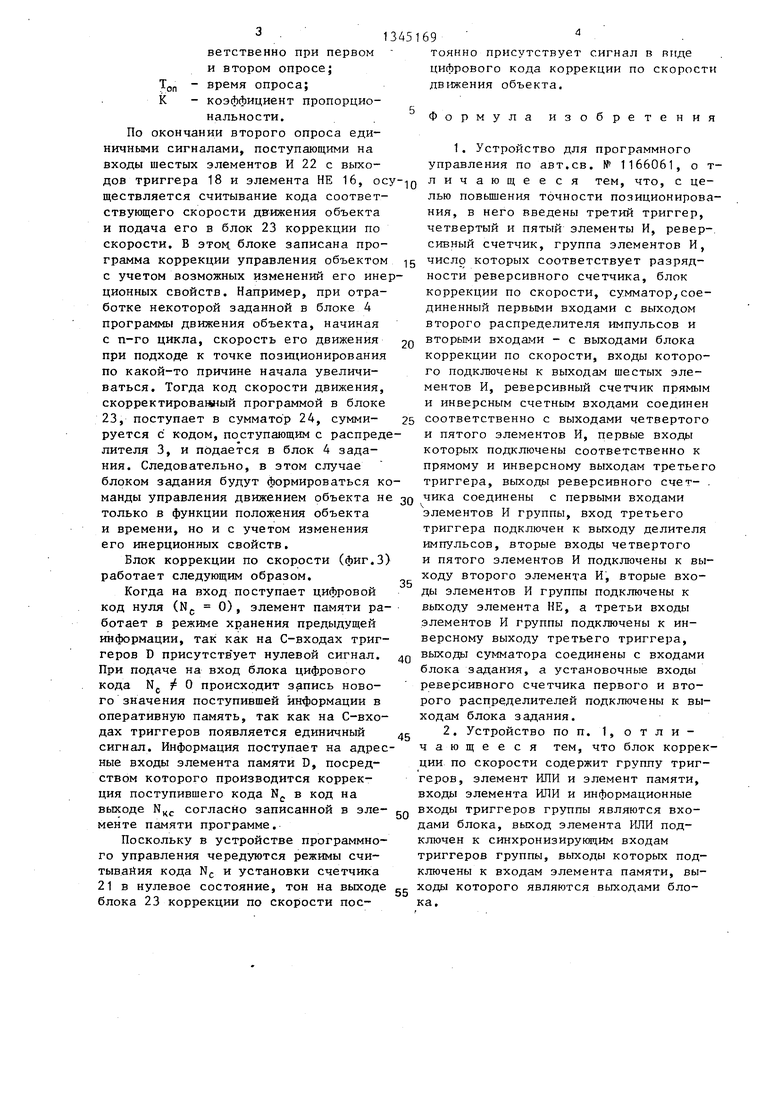
Блок коррекции по скорости (фиг.З) содержит элемент ИЛИ 25, группу триггеров 26, элемент 27 памяти. I
Устройство работает следующим образом.
На установочные входы реверсивного счетчика 21, первого и второго распределителей 2 и 3 с блока 4 задания подается импульс установки схемы этого триггера, снимает единичный
в начальное состояние. I
Генератор 1 импульсов формирует
импульсы, поступающие на вход второго элемента И 8 и делителя 6 частоты.
сигнал, давая запрет прохождению пач ки импульсов через второй элемент И 8 и через четвертый и пятый элементы И 19, 20 к входам реверсивного счетс выхода которого импульсы 5 (фиг.2) 45 чика 21. Поскольку при первом опросе
запускают генератор 12 опроса, в частности генератор пилообразного напряжения (фиг. 2, в) устанавливает в единичное состояние триггер 15 (фиг. 2, е) и триггер 18. Выходной единичный сигнал триггера 15 дает разрешение на начало пропуска пачки импульсов через второй элемент И 8
(после установки схемы в начальное состояние) пачка импульсов поступает на вход прямого счета счетчика 21, а при втором опросе - на вход обрат- gg ного счета, то в конце второго опроса на выходе счетчика 21 формируется цифровой код разности числа импуль.сов двух опросов (фиг. 2, с), COOT-
ветствующий скорости движения управна второй распределитель 3, на выходных шинах которого формируются импуль-gg ляемого объекта, т.е. сы (фиг. 2, и, к, л), которые посту- SA vy пают на сумматор 24. ОдновременноТд Т,
пачки импульсов через четвертый эле- где X,, Х - цифровой эквивалент ко- мент И 19, на первом входе которогоординаты объекта COQTпают на вход прямого счета реверсивного счетчика 21 (фиг. 2, о). При втором опросе датчика 9 триггер 18 переключается в нулевое состояние и пачки импульсов через пятый элемент И 20, на nepBQM входе которого появляется единичный сигнал (фиг. 2, п),
счетчика 21.
Триггеры 10 формирователей 5 импульсов устанавливаются в единичное состояние сигналами с выходов перво- го распределителя 2 и подачей единичного сигнала на вторые входы первых элементов И 11 и дают разрешение на прохождение сигналов через эту схему с блока задания программ до достижепульсов на выходе сумматора 24.
При движении объекта управления вдоль светочувствительной зоны коор- динатно-чувствительного приемника 13,
например сканистра, движется световой поток 9f. (фиг. 2, а), причем интегральный видеосигнал сканистра (фиг. 2, г), несущий информацию о положении (координаты) управляемого
объекта, обрабатывается преобразователем 14 видеосигнал-импульс (в частности дифференцирование фиг. 2, д с преобразованием триггером в прямоугольный импульс), временное положение которого относительно начала развертки сигнала характеризует положение (координату) объекта. Появление этого сигнала на первом входе первого триггера 15 изменяет состояние
сигнал, давая запрет прохождению пачки импульсов через второй элемент И 8 и через четвертый и пятый элементы И 19, 20 к входам реверсивного счет45 чика 21. Поскольку при первом опросе
(после установки схемы в начальное состояние) пачка импульсов поступает на вход прямого счета счетчика 21, а при втором опросе - на вход обрат- gg ного счета, то в конце второго опроса на выходе счетчика 21 формируется цифровой код разности числа импуль.сов двух опросов (фиг. 2, с), COOT-
ветствующий скорости движения управgg ляемого объекта, т.е. SA vy Тд Т,
ветственно при первом и втором опросе; Tgn - время опроса; К - коэффициент пропорциональности.
По окончании второго опроса единичными сигналами, поступающими на входы шестых элементов И 22 с выхотоянно присутствует сигнал в диде цифрового кода коррекции по скорости движения объекта.
Формула изобретения
1. Устройство для программного управления по авт.св. № 1166061, о т- дов триггера 18 и элемента НЕ 16, личающееся тем, что, с цеществляется считывание кода соответствующего скорости движения объекта и подача его в блок 23 коррекции по скорости. В этон блоке записана программа коррекции управления объектом с учетом возможных изменений его инеционных свойств. Например, при отработке некоторой заданной в блоке 4 программы движения объекта, начиная с п-го цикла, скорость его движения при подходе к точке позиционирования по какой-то причине начала увеличиваться. Тогда код скорости движения, скорректированный программой в блоке 23, поступает в сумматор 24, суммируется с кодом, поступающим с распредлителя 3, и подается в блок 4 задания. Следовательно, в этом случае блоком задания будут формироваться к
35
40
манды управления движением объекта не зо чика соединены с первыми входами только в функции положения объекта и времени, но и с учетом изменения его инерционных свойств.
Блок коррекции по скорости (фиг.З) работает следующим образом.
Когда на вход поступает цифровой код нуля (NJ. 0) , элемент памяти работает в режиме хранения предыдущей информации, так как на С-входах триггеров D присутств ует нулевой сигнал. При подаче на вход блока цифрового кода И О происходит запись нового значения поступившей информации в оперативную память, так как на С-входах триггеров появляется единичный сигнал. Информация поступает на адресные входы элемента памяти D, посредством которого производится коррекция поступившего кода N в код на выходе . согласно записанной в элементе памяти программе.
Поскольку в устройстве программного управления чередуются режимы счи- тывайия кода N и установки счетчика 21 в нулевое состояние, тон на выходе блока 23 коррекции по скорости пос45
50
55
элементов И группы, вход третьего триггера подключен к выходу делите импульсов, вторые входы четвертого и пятого элементов И подключены к ходу второго элемента И, вторые вх ды элементов И группы подключены к выходу элемента НЕ, а третьи входы элементов И группы подключены к ин версному выходу третьего триггера, вькоды сумматора соединены с входа блока задания, а установочные входы реверсивного счетчика первого и вт рого распределителей подключены к в ходам блока задания.
2. Устройство по п. 1, отличающееся тем, что блок корр ции по скорости содержит группу три геров, элемент ИЛИ и элемент памяти входы элемента ИЛИ и информационные входы триггеров группы являются вхо дами блока, выход элемента 1ШИ подключен к синхронизирующим входам триггеров группы, выходы которых по ключены к входам элемента памяти, в ходы которого являются выходами бло ка.
1345169
тоянно присутствует сигнал в диде цифрового кода коррекции по скорости движения объекта.
Формула изобретения
лью повьшения точности позиционирования, в него введены третий триггер, четвертый и пятый элементы И, реверсивный счетчик, группа элементов И, число которых соответствует разрядности реверсивного счетчика, блок коррекции по скорости, сумматор соединенный первыми входами с выходом второго распределителя импульсов и вторыми входалми - с выходами блока коррекции по скорости, входы которого подключены к выходам шестых элементов И, реверсивный счетчик прямым и инверсным счетным входами соединен соответственно с выходами четвертого и пятого элементов И, первые входы которых подключены соответственно к прямому и инверсному выходам третьего триггера, выходы реверсивного счет- .
чика соединены с первыми входами
элементов И группы, вход третьего триггера подключен к выходу делителя импульсов, вторые входы четвертого и пятого элементов И подключены к выходу второго элемента И, вторые входы элементов И группы подключены к выходу элемента НЕ, а третьи входы элементов И группы подключены к инверсному выходу третьего триггера, вькоды сумматора соединены с входами блока задания, а установочные входы реверсивного счетчика первого и второго распределителей подключены к выходам блока задания.
2. Устройство по п. 1, отличающееся тем, что блок коррекции по скорости содержит группу триггеров, элемент ИЛИ и элемент памяти, входы элемента ИЛИ и информационные входы триггеров группы являются входами блока, выход элемента 1ШИ подключен к синхронизирующим входам триггеров группы, выходы которых подключены к входам элемента памяти, выходы которого являются выходами блока.
Т
Редактор А.Долинич
фигЗ
Составитель Ю.Вельских
Техред Л.Сердюкова Корректор С.Черни
Заказ 4919/46Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открыти 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
1345169
1
Фс
фиг. 2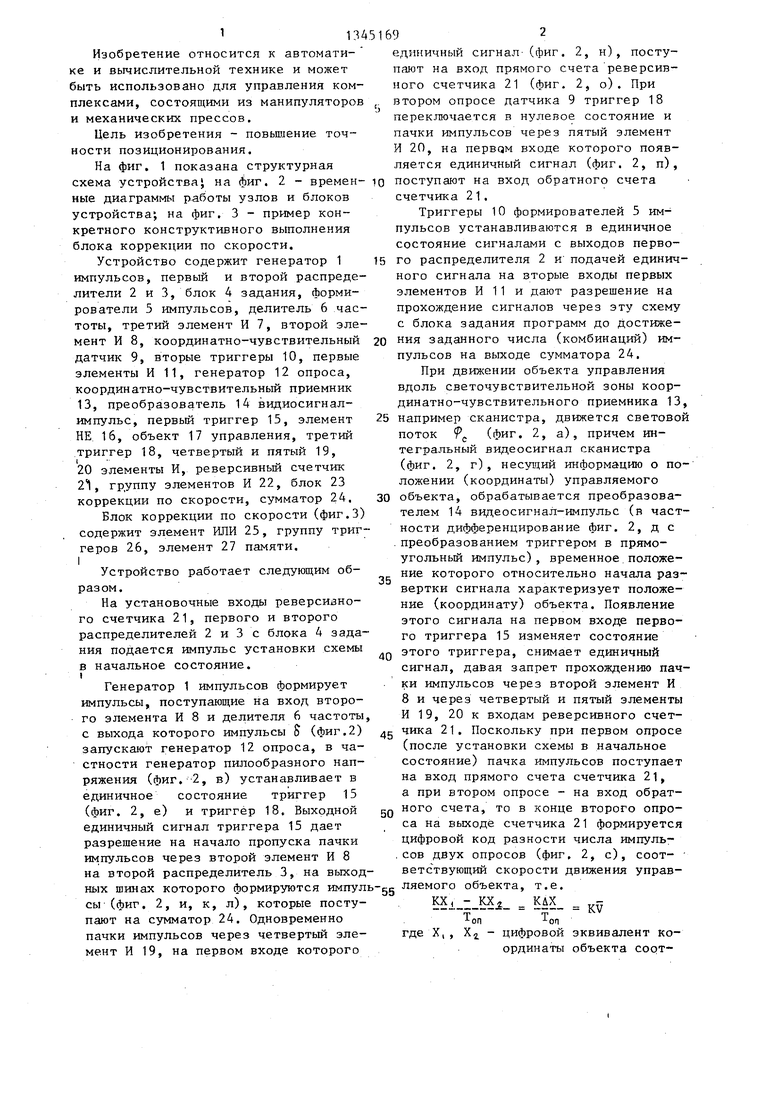
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки памяти | 1991 |
|
SU1786501A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Устройство для информационного поиска | 1989 |
|
SU1608694A2 |
| Устройство для сопряжения дискретных датчиков с электронной вычислительной машиной | 1982 |
|
SU1024898A2 |
| Устройство для оценки профессиональной пригодности оператора | 1989 |
|
SU1755314A1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| Устройство для профессионального отбора операторов | 1989 |
|
SU1695362A1 |
| Цифровое устройство управление весовым дозированием | 1980 |
|
SU866418A1 |
| Устройство для профессионального отбора операторов | 1990 |
|
SU1751804A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
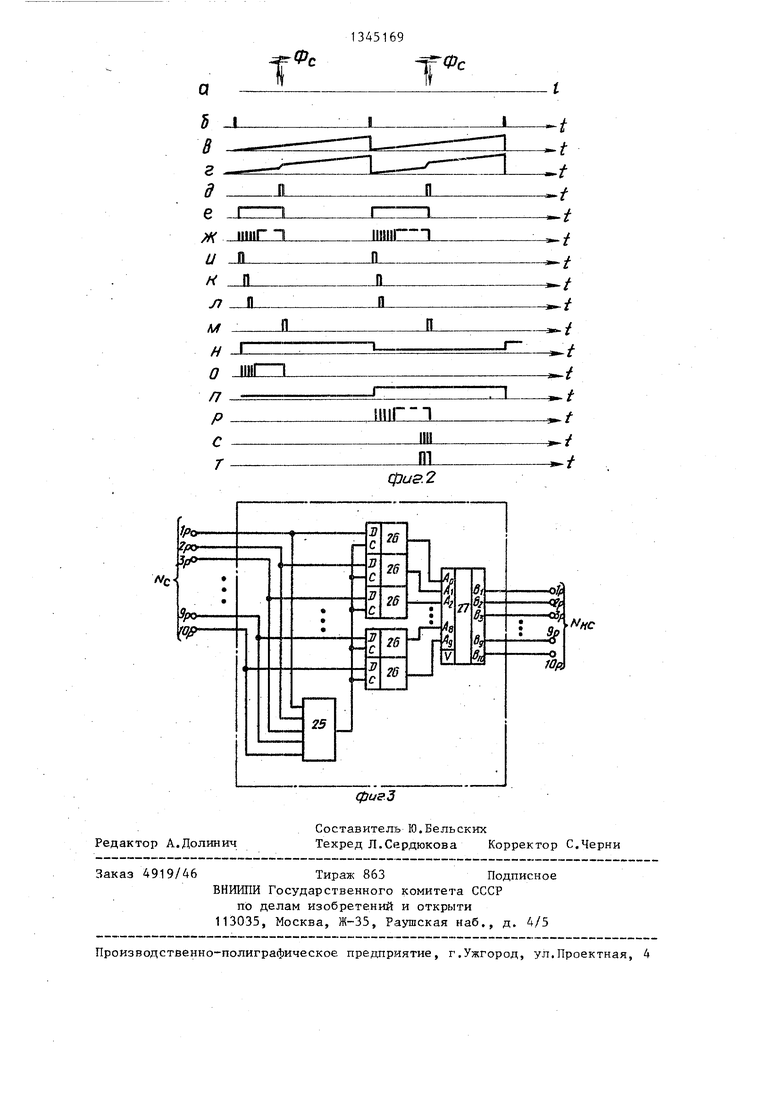
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления комплексами с манипуляторами и механическими прессами. Изобретение позволяет повысить точность позиционирования за счет введения в него триггера 18, четвертого 19 и пятого 20 элементов И, реверсивного счетчика 21, группы элементов И 22, блока коррекции по скорости 23 и сумматора 24. При движении объекта на вькоде реверсивного счетчика 21 в конце каждого второго опроса формируется цифровой код, соответствующий скорости движения управляемого объекта. Данный код преобразуется в блоке 23 таким образом, что суммируясь с кодом, задающим программу движения, в сумматоре 24, кор- g ректирует ее с учетом изменения ско- рости. 1 з.п. ф-лы, 3 ил. (Л то СО 4 СП О) СО го фиг.1
| Устройство для программного управления | 1981 |
|
SU1166061A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
