Изобретение относится к мелиорации в сельском хозяйстве, служит для решения фильтрационных задач методом аналогового гидравлического моделирования и может быть использовано для моделирования процесса фильтрации в сложных гидрогеологических условиях, а также для прогноза влияния мелиорации на уровень грунтовых вод смежных территорий с учетом взаимовлияния мелиоративных объектов.
Цель изобретения - повышение точ- ности автоматизированного моделирования фильтрации в сложных гидрогеологических условиях.
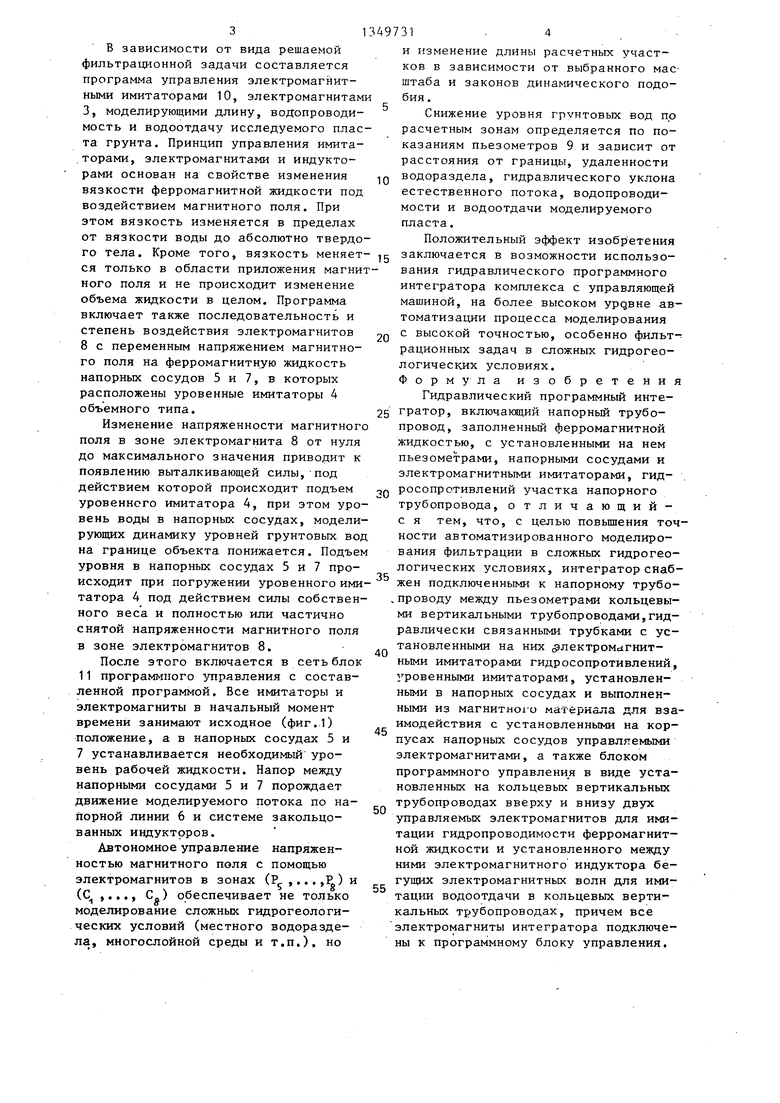
На чертеже представлена схема гидравлического программного интегратора.
Интегратор содержит кольцевые вер- 20 программным изменением напряжет.икальные трубопроводы 1, соединенны трубками и задающие управляемую цир- жуляцию ферромагнитной жидкости в зонах (Р, Р,,...,) действия электромагнитов 2. В этих зонах (,
PC) электромагнитами 2 создаются
области переменной напряженности магнитного поля от нуля до максимального значения, при которой вязкость ферромагнитной жидкости изменяется от вязкости воды до абсолютно твердого тела. На трубопроводах 1 установлены также электромагнитные индуктор 3, создающие зоны (С ,С,, .. . ,Cg ) бегущих магнитных полей, способных ускорить, замедлить или изменить направление циркуляции ферромагнитной жидкости, моделируя при этом локальные водоразделы исследуемого пласта грунта. Интегратор содержит также уровенные имитаторы 4, вьшолненные в виде стержней из магнитных материалов, напорных сосудов 5, установленных на напорной линии 6 при решении общих фильтрационных задач служат для моделирования уровня грунтовых вод на контуре питания, а в случае оценки влияния мелиорации на уровен- ный режим смежных территорий, когда средний напорный сосуд 7 моделирует водораздел, являются аналогами режима грунтовых вод на границе мелиоративный объект - смежная территория. Для управления положением уровня рабочей жидкости в напорных сосудах 5 и 7 уровенные имитаторы 4 снабжены электромагнитами 8, создакщими зоны (К,К2, Kj) переменной нацря- женности магнитного поля. На харак
5
терных участках моделируемого потока установлены пьезометры 9,. а по длине напорной линии 6 и на трубках мелсду кольцевыми вертикальными трубопроводами 1 установлены электромагнитные имитаторы 10 гидросопротивлений, представляющие собой обычные круговые электромагниты. Для управления процессом моделирования служит блок 11 программного управления.
Проводимость водоносного пласта моделируется пропорциональным значением напряженности магнитного поля с помощью электромагнита 2, с управляемой непосредственно в процессе моделирования напряженностью магнитного поля в зависимости от решаемой фильтрационной задачи. Это достига5
ния, от нуля до максимального значения, на. полюсах электромагнита 2. Имитаторы 10, йредставляющие собой круговые электромагниты, моделируют
5 длину водоносного пласта. Величина магнитного поля под их действием не изменяется, остается строго постоянной в течение моделирования конкретной фильтрационной задачи для
Q соблюдения равенства критериев динамического и линейного подобия. Вертикальное положение индукторов является одним из возможн гх, также как и их количество. Положение индукторов не может оказывать влияния на процесс моделирования, так как случай разрьша движения ферромагнитной жидкости исключается и влияние сил тяжести отсутствует, а ускорить или замедлить ее движение можно с помощью магнитных молей, создаваемых электромагнитами 3..
Наличие подвижных границ характерно при моделировании фильтрационной
5 задачи безнапорного питания. Так, например, при возмущении водоносного пласта скважиной вертикального дренажа радиус влияния изменяется во времени, не остается постоянным и конQ тур питания, т.е. границы области фильтрации являются подвижными. Моделирование подвижных границ конструкции интегратора достигается уро- венными имитаторами 4, положение котоg рых может измеряться по заданной программе в процессе моделирования, под действием зон (К ,К , К ).
Интегратор работает следующим образом.
0
в зависимости от вида решаемой фильтрационной задачи составляется программа управления электромагнитными имитаторами 10, электромагнитами 3, моделирующими длину, водопроводи- мость и водоотдачу исследуемого пласта грунта. Принцип управления имитаторами, электромагнитами и индукторами основан на свойстве изменения вязкости ферромагнитной жидкости под воздействием магнитного поля. При этом вязкость изменяется в пределах от вязкости воды до абсолютно твердого тела. Кроме того, вязкость меняет- g заключается в возможности использося только в области приложения магнитного поля и не происходит изменение объема жидкости в целом. Программа включает также последовательность и степень воздействия электромагнитов 8 с переменным напряжением магнитного поля на ферромагнитную жидкость напорных сосудов 5 и 7, в которых расположены уроненные имитаторы 4 объемного типа.
Изменение напряженности магнитного поля в зоне электромагнита 8 от нуля до максимального значения приводит к появлению выталкивающей силы, под действием которой происходит подъем уровенного имитатора 4, при этом уровень воды в напорных сосудах, моделирующих динамику уровней грунтовых вод на границе объекта понижается. Подъем уровня в напорных сосудах 5 и 7 происходит при погружении уровенного имитатора 4 под действием силы собственного веса и полностью или частично снятой напряженности магнитного поля в зоне электромагнитов 8.
После этого включается в сеть блок 11 программного управления с составленной программой. Все имитаторы и электромагниты в начальный момент времени занимают исходное (фиг.1) положение, а в напорных сосудах 5 и 7 устанавливается необходимый уровень рабочей жидкости. Напор между напорными сосудами 5 и 7 порождает движение моделируемого потока по напорной линии 6 и системе закольцованных индукторов.
Автономное управление напряженностью магнитного поля с помощью электромагнитов в зонах (Р,...,Е) и (Cj ,..., С.) обеспечивает не только моделирование сложных гидрогеологических условий (местного водораздела, многослойной среды и т.п.). но
20
вания гидравлического программного интегратора комплекса с управляющей машиной, на более высоком урдвне автоматизации процесса моделирования с высокой точностью, особенно фильт30
35
рационных задач в сложных гидрогеологических условиях. Формула изобретения
Гидравлический программный инте- 25 гратор, включакяций напорный трубопровод, заполненный ферромагнитной жидкостью, с установленными на нем пьезометрами, напорными сосудами и электромагнитными имитаторами, гидросопротивлений участка напорного трубопровода, отличающий- с я тем, что, с целью повьш1ения точ ности автоматизированного моделирования фильтрации в сложных гидрогеологических условиях, интегратор снабжен подключенными к напорному трубопроводу между пьезометрами кольцевыми вертикальными трубопроводами,гидравлически связанными трубками с установленными на них (Электромагнит- ными имитаторами гидросопротивлений, уровенными имитаторами, установленными в напорных сосудах и выполненными из магнитно1 о материала для вза имодействия с установленными на корпусах напорных сосудов управляемыми электромагнитами, а также блоком программного управлени я в виде уста- новленньк на кольцевых вертикальных трубопроводах вверху и внизу двух управляемых электромагнитов для имитации гидропроводимости ферромагнитной жидкости и установленного между ними электромагнитного индуктора бегущих электромагнитных волн для имитации водоотдачи в кольцевых вертикальных трубопроводах, причем все электромагниты интегратора подключены к программному блоку управления.
40
45
50
55
зависимости от выбранного мае- и законов динамического подо49731 . 4
и изменение длины расчетных участков в штаба бия.
Снижение уровня грунтовых вод по расчетным зонам определяется по показаниям пьезометров 9 и зависит от расстояния от границы, удаленности Q водораздела, гидравлического уклона естественного потока, водопроводи- мости и водоотдачи моделируемого пласта.
Положительный эффект изобретения
вания гидравлического программного интегратора комплекса с управляющей машиной, на более высоком урдвне автоматизации процесса моделирования с высокой точностью, особенно фильт0
5
рационных задач в сложных гидрогеологических условиях. Формула изобретения
Гидравлический программный инте- 5 гратор, включакяций напорный трубопровод, заполненный ферромагнитной жидкостью, с установленными на нем пьезометрами, напорными сосудами и электромагнитными имитаторами, гидросопротивлений участка напорного трубопровода, отличающий- с я тем, что, с целью повьш1ения точности автоматизированного моделирования фильтрации в сложных гидрогеологических условиях, интегратор снабжен подключенными к напорному трубопроводу между пьезометрами кольцевыми вертикальными трубопроводами,гидравлически связанными трубками с установленными на них (Электромагнит- ными имитаторами гидросопротивлений, уровенными имитаторами, установленными в напорных сосудах и выполненными из магнитно1 о материала для взаимодействия с установленными на корпусах напорных сосудов управляемыми электромагнитами, а также блоком программного управлени я в виде уста- новленньк на кольцевых вертикальных трубопроводах вверху и внизу двух управляемых электромагнитов для имитации гидропроводимости ферромагнитной жидкости и установленного между ними электромагнитного индуктора бегущих электромагнитных волн для имитации водоотдачи в кольцевых вертикальных трубопроводах, причем все электромагниты интегратора подключены к программному блоку управления.
0
5
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический модульный программный интегратор | 1987 |
|
SU1461388A1 |
| Гидравлический интегратор прогнозов Шведовского | 1980 |
|
SU974974A1 |
| Гидравлический интегратор прогнозов | 1980 |
|
SU1016680A1 |
| Гидравлический интегратор прогнозовшВЕдОВСКОгО | 1979 |
|
SU808856A1 |
| Гидравлический интегратор | 1984 |
|
SU1273032A1 |
| Грунтовый лоток | 1983 |
|
SU1097748A1 |
| Грунтовый лоток | 1984 |
|
SU1242577A1 |
| БЛОК СЕКЦИИ ГИДРОИНТЕГРАТОРА | 1970 |
|
SU283690A1 |
| Способ подготовки водозаборной скважины к эксплуатации | 1986 |
|
SU1491974A1 |
| Магнитная холодильная установка | 1983 |
|
SU1142710A1 |
Изобретение относится к области мелиорации в сельском хозяйстве и может быть применено для аналогового гидравлического моделирования процессов фильтрации в сложных гидрогеологических условиях. Гидравлический интегратор включает систему кольцевых вертикальных трубопроводов 1 с индукторами 3 и электромагнитами 2, имеющими зоны переменной напряженности (Р jP Р , ..., Р ) магнитного поля и бегущих магнитных полей (С ,С j,C , ..., С) , способных ускорить, замедлить или изменить направление циркуляции ферромагнитной жидкостью. Эти зоны соединены с блоком 11 программного управления, к которому подключены управляемые уровенные имитаторы 4 с электромагнитами 8, содержащими зоны (К, К К„) управляемого магнитного поля, установленные в напорных сосудах 5 и 7 объемного типа, установленных на напорной линии 6. Линия 6 снабжена Q электромагнитными имитаторами 10 гид- S росопротивлений, представляющими собой обычные круговые электромагниты, И-пьезометрами 9. 1 ил. СО 4 со 00
| Гидравлический интегратор прогнозов Шведовского | 1980 |
|
SU974974A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
