1
Изобретение относится к устрой-- ствам дпя решения фильтрационных задач сельскохозяйственного водоснабжения методом аналогового гидравли ческого моделирования пространственной фильтрации в сложных гидрогеологических условиях, а также прогнозных задач влияния водохозяйственных и других производственных объектов на гидрогеологическую обстановку в орошаемых сельскохозяйственньЬс регионах
Цель изобретения - повьшение достоверности региональной оценки вли- яния водохозяйственных объектов на гидрогеологическую обстановку сельскохозяйственного массива.
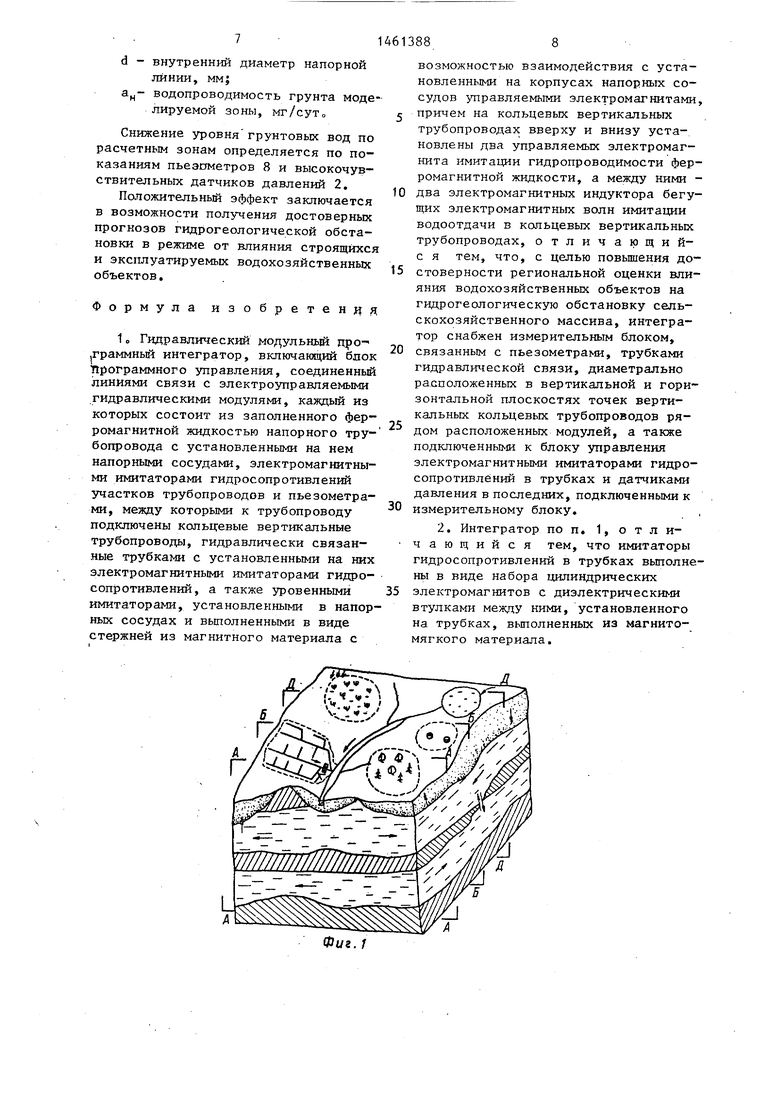
На фиг. 1 приведен водохозяйственный объект моделирования, общий вид; на фиг. 2 - гидравлический модульньй программный интегратор без измерительного блока и блок управления, юбщий вид; на фиг о 3 - электроуправ- ляемый гидравлический модуль, общий вид; на фиг. 4 - напорный сосуд; на фиг. 5 - уровенньй имитатор; на фиг. 6 - трубки с имитаторами гидросопротивлений, общий вид; на фиг. 7- компоновочная схема устройства.
Гидравлический модульный интегратор состоит из отдельных модулей, соединенных между собой в ортогональных плоскостях напорными каналами 1 из магнитомягкого материала с распре- деленными по длине высокочувствительными датчиками давлений 2, соединенными с измерительным блоком 3 и снабженными управляемыми линейными электромагнитными имитаторами 4 гидросо противлении, установленных на трубках (кассетного типа) и блока 5 программного ,управления . I.
Каждый модуль состоит из кольцевых вертикальных трубопроводов 6, под ключенных к напорному трубопроводу 7
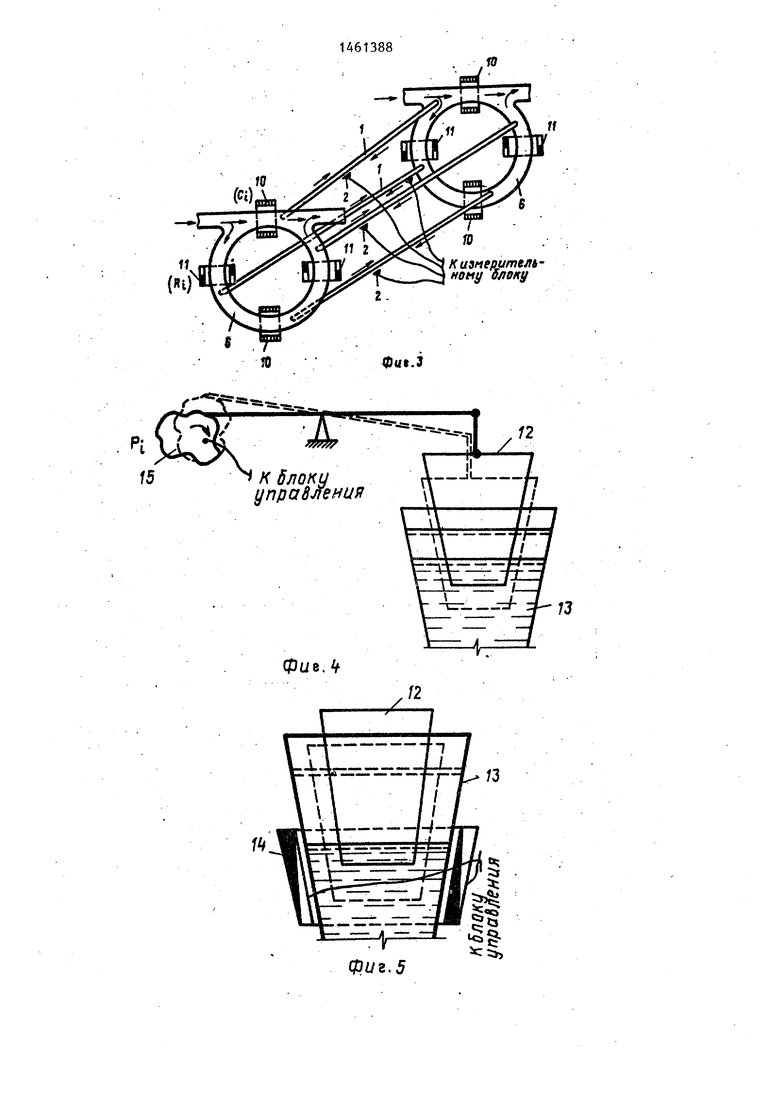
между пьезометрами 8 и гидравлически связанными между собой трубками 9, Управляемая циркуляция рабочего тела - ферромагнитной жидкости создается посредством управляемых электромагнитов 10 переменной напряженности магнитного поля - от нуля до максимального значения. При этом вязкость ферромагнитной жидкости изменяется от вязкости воды до абсолютно, твердого тела и служит для имитации гидропроводимости между водохозяйственными объектами или контрольными точками для рассматриваемого модуля. Кроме того, посредством установленного между электромагнитами 10 электромагнитного индуктора 11 бегущих электромагнитных волн осуществляется имитация водоотдачи в кольцевых вертикальных трубопроводах 6 путем ускорения, замедления или изменения направления циркуляции рабочей жидкости
Уроненные имитаторы 12 напорных сосудов 13, установленные на напорном трубопроводе 7, при оценке влияния водохозяйственных объектов на гидрогеологическую обстановку, служат для моделирования динамики уровней грунтовых вод (УГВ) на контуре питания, распределенных по линии рассматриваемого модуля (сечения А-А, Б-Б или Д- Д) естественных дополнительных источников стока, инфильтрации, испарения; площадного перетекания, системы пополнения подземных вод, регулирующих сооружений и других водохозяйственных объектов, оказы: ающих влияние на УГВ прилегающей территории о
Дпя управления положением уровня
рабочей жидкости в напорных сосудах
13 уровеннью имитаторы 12 выполнены
из ферромагнитного материала, а на
корпусах сосудов 13 установлены управляемые электромагниты 14 переменной напряженности магнитного поля,
В этом случае, если закон изменения УГВ на прилегающей территории шш самом водохозяйственном объекте известен, то для управления положением рабочей жидкости в соответству- кяцем напорном сосуде 14 можно использовать копирный механизм, который, копируя очертания при вращении съемной пластины - программного диска 15 с запрограммированным режимом подземных вод (Р, , Р, р, , ..., р), вызывает движение (вверх-вниз) уровенно- го имитатора 12, что обеспечивает целенаправленное изменение уровня жидкости в самом напорном сосуде 13. Магнитные имитаторы гидросопротивлений 4 (кассетного типа) изолированы друг о т друга диэлектриком 16, обеспечивающим независимость протекающих по имитаторам 4 токов и, следовательно, независимость их работы.
Примером водохозяйственного объекта с известным законом изменения уровня может служить водохранилище, пруд сезонного, месячного или недель25 расчетная полоса (т.е„ конкретная плотность в определенном направле- ;нии) и расчетные водохозяйственные объекты. При этом имеется в виду та деталь, что мелкие водохозяйствен
ного регулирования. Для такого объек-30 ные объекты, т.е„ не оказьшакицие сута составляется диспетчерский график и процесс сработ ки и наполнения протекает в строгой последовательности. На характерных участках напорного
щественного влияния на гидрогеологическую обстановку, с использованием принципа супперпозиций либо исключат друг друга (по линии модуля), либо
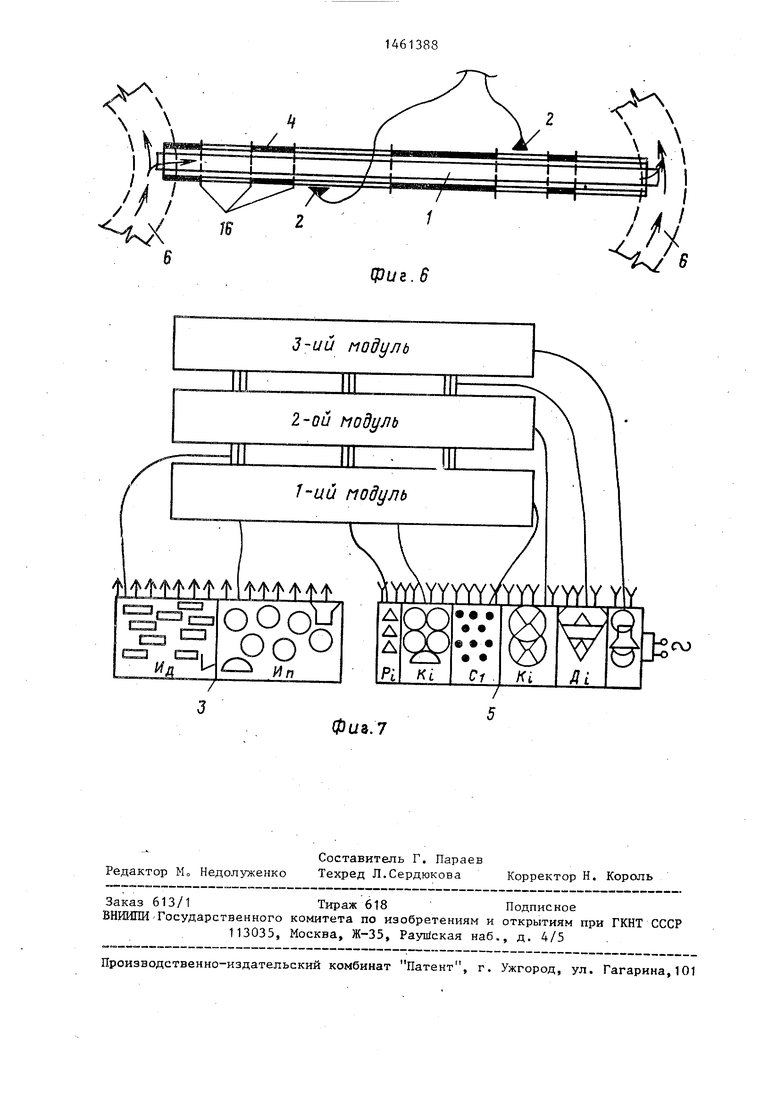
трубопровода 7 и соединительных труб- 35 образуют расчетные или результируках 9 установлены (фиг, 6) управляемые электромагнитные имитаторы гидросопротивлений 4 (на фиг, 2 не показаны) о
Количество модулей определяется степенью достоверности моделирования процессов фильтрации, пространственным распределением водохозяйственных объектов и контрольных точек по оцен ке гидрогеологической обстановки региона.
Для з равления всеми электромагни-. тами в блоке 5 управления предусмотрены секции, элементы которых (показаны точками) связаны с электромагнитами устройства. Буквенные индексы означают Р - секция блока 5 управления с элементами, управляющими программным диском 15; К - секция управления электромагнитами 10; С - секция управления электромагнитами 4; R - секция управления индукторами 11; D - секция управления электромагни.тами 10, установленными на трубках 9;
клцие водохозяйственные объекты и начальное положение УГВ на них.
Составляется программа управления имитаторами 4 и электромагнитами 10
40 электромагнитного индуктора 1,1, моделирующими длину, водопроводимость и водоотдачу исследуемого пласта по модульной линии и в ортогональной плоскости
45 Принцип управления имитаторами основан на свойстве изменения вязкости ферромагнитной жидкости под воздействием магнитного поля. При этом вязкость изменяется в пределах от
50 вязкости воды до абсолютно твердого тела. Кроме того, вязкость меняется только в области приложенрет магнитного поля и не происходит изменение объема жидкости в целом,
55 Программа включает также последовательность и степень управляемого воздействия электромагнитов 14 на протяженность магнитного поля ферромагнитной жидкости в напорных сосу1461388
М - секция управления электромагнитами 14 о
Измерительньш блок также разбит на секторы U. и и„, причем .11. - секатор, блока, показывающий изменение уровня грунтовых вод по данным пьезометров 8, а и„- сектор блока, показывающий изменение уровня грунтовых вод
по данным высокочувствительных датчиков 2 давления.
Гидравлический модульный интегратор работает следующим образом.
В начальный период моделирования
для рассматриваемого региона выявляются все водохозяйственные объекты, в той или иной мере влиякнще на гидрогеологическую обстановку, их пространственное распределение коррдинаты. Намечается количество модулей и контрольных точек, позволяющих с требуемой точностью оценить гидрогеологическую обстановку региона. По линии каждого модуля определяется
расчетная полоса (т.е„ конкретная плотность в определенном направле- ;нии) и расчетные водохозяйственные объекты. При этом имеется в виду та деталь, что мелкие водохозяйственные объекты, т.е„ не оказьшакицие существенного влияния на гидрогеологическую обстановку, с использованием принципа супперпозиций либо исключат друг друга (по линии модуля), либо
образуют расчетные или результиру35 образуют расчетные или результируклцие водохозяйственные объекты и начальное положение УГВ на них.
Составляется программа управления имитаторами 4 и электромагнитами 10
0 электромагнитного индуктора 1,1, моделирующими длину, водопроводимость и водоотдачу исследуемого пласта по модульной линии и в ортогональной плоскости
5 Принцип управления имитаторами основан на свойстве изменения вязкости ферромагнитной жидкости под воздействием магнитного поля. При этом вязкость изменяется в пределах от
0 вязкости воды до абсолютно твердого тела. Кроме того, вязкость меняется только в области приложенрет магнитного поля и не происходит изменение объема жидкости в целом,
5 Программа включает также последовательность и степень управляемого воздействия электромагнитов 14 на протяженность магнитного поля ферромагнитной жидкости в напорных сосудах 13. Изменение напряженности магнитного поля управляемыми электромагнитами 14 от нуля до максимального значения приводит к изменению плотности ферромагнитной жидкости и порождает выталкивакяцую силу, под действием которой происходит подъем уровенного имитатора 12, а уровень воды в напорном сосуде 13 понижает- .10 где ся. Подъем уровня рабочей жидкости g напорном сосуде 13 происходит при t погружении уровенного имитатора 12 под действием сипы собственного веса при полностью или частично снятой 15 напряженности магнитного поля электромагнитом 14.
Включается в сеть блок 5 управления с составленной программой моделирования. Все имитаторы в начальный 20 момент В1 емени занимают исходное положение. В первую очередь подается максимальное напряжение на управляемые электромагниты 10 (слева и спрадвижение в каждом модуле и между ними по напорным каналам 1 до полной стабилизации потока, время наступления которой определяется из условий
. С,
t- - й
л
ьлтт;)
boCZLv,)
а L
-,Н
-
V
С ,.
Со и Ь
водопр.оводимость; длина участка; соответственно продолжительность процесса влияния водохозяйственного объекта на гидр.о- геологическую обстановку на модели и в натуре;, соответственно периоды стабилизации; коэффициенты пропорциональности модельного и натурного времени модетельно, и давление в напорньк каналах 1, снимаемое высокочувствительными датчиками давлений 2, и скорость повьппения уровня рабочей жидкости
лированияо
,Скорость движения ферромагнитной
ва от напорных сосудов 13) на напор- 25 жидкости на каждом участке, а следова- ных трубопроводах 7 каждого модуля. В зоне действия электромагнитов 10 вязкость ферромагнитной жидкости возрастает до абсолютно твердого тела напорньй трубопровод 7 перекатьшает- 30 в пьезометрах В, зависят от состо- сяо С помощью управляемых электро- яния всех управляемых электромагни- магнитов 14 путем изменения напряжен- тов напорных линий, каждый из кото- ности магнитного поля уровенные ими- рых моделирует вполне определеннью таторы 12 занимают начальное положе- гидрогеологические условия согласно ние и во всех напорных сосудах 13 35 программе эксперимента, (за исключением тех, где установлен Моделирование осуществляется по копирньш механизм) модульного интег- известному закону ратора устанавливается требуемое зна- IlillSil чение уровня .рабочей жидкости На- (UH чальное положение уровня рабочей жид- 40 кости в каждом напорном сосуде 13 с учетом закона геометрического подобия соответствует начальному положению УГВ. конкретньк расчетных водохозяйственных объектов или других источников стокао На напорных сосудах 13 с копирным механизмом устанавливается соответствующий программный диск 15о Гидравлический .модульный интегратор готов к работе. Включается в сеть измерительный блок и снимается напряжение с управляемых электромагнитов 10 (слева и справа
где fu
45
Рн
L,. 50
от напорных сосудов 13) до программного значения, соответствующего во- допроэодимостй этого участка.
За счет образовавшегося геометрического напора между надорными сосудами 13 рабочая жидкость придет в
коэффициент водоотдачи грунтов на модели, определяемый скоростью движения рабочей жидкости по напорной линии; коэффициент водоотдачи фильтрационной области; длина участка от имитатора до пьезометра, м;-. расчетная длина модели-г руемой зоны, м; водопроводимость грунта на модели, определяемая по зависимости:
55
а., 86,4,10- ,
.W
V - скорость движения ркидкости в зоне установки имитаторов,
t о
-
М/С
где t
движение в каждом модуле и между ними по напорным каналам 1 до полной стабилизации потока, время наступления которой определяется из условий
. С,
t- - й
л
ьлтт;)
boCZLv,)
а L
Н
V
С ,.
и Ь
водопр.оводимость; длина участка; соответственно продолжительность процесса влияния водохозяйственного объекта на гидр.о- геологическую обстановку на модели и в натуре;, соответственно периоды стабилизации; коэффициенты пропорциональности модельного и натурного времени модетельно, и давление в напорньк каналах 1, снимаемое высокочувствительными датчиками давлений 2, и скорость повьппения уровня рабочей жидкости
жидкости на каждом участке, а следова-
0 в пьезометрах В, зависят от состо- яния всех управляемых электромагни- тов напорных линий, каждый из кото- рых моделирует вполне определеннью гидрогеологические условия согласно 5 программе эксперимента, Моделирование осуществляется по известному закону IlillSil (UH 0
где fu
5
Рн
L,. 0
коэффициент водоотдачи грунтов на модели, определяемый скоростью движения рабочей жидкости по напорной линии; коэффициент водоотдачи фильтрационной области; длина участка от имитатора до пьезометра, м;-. расчетная длина модели-г руемой зоны, м; водопроводимость грунта на модели, определяемая по зависимости:
а., 86,4,10- ,
.W
V - скорость движения ркидкости в зоне установки имитаторов,
t о
-
М/С
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический программный интегратор | 1985 |
|
SU1349731A1 |
| Гидравлический интегратор прогнозов Шведовского | 1980 |
|
SU974974A1 |
| Гидравлический интегратор прогнозов | 1980 |
|
SU1016680A1 |
| Гидравлический интегратор прогнозовшВЕдОВСКОгО | 1979 |
|
SU808856A1 |
| Гидравлический интегратор | 1984 |
|
SU1273032A1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| СИСТЕМА ИМИТАЦИИ ИНФРАКРАСНОЙ ОБСТАНОВКИ ДЛЯ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ | 2012 |
|
RU2513674C2 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
Изобретение относится к устройствам для решения задач сельскохозяйственного водоснабжения путем аналогового гидравлического моделирования пространственной фильтрации в сложных гидрогелогических условиях, а также прогнозных задач влияния водохозяйственных и других производственных объектов на гидрогеологическую обстановку в регионах. Цель изо бретения - повышение достоверности региональной оценки влияния водохозяйственных объектов на гидрогеологическзт) обстановку .сельскохозяйственного массива. Гидравлический модульный программньй интегратор содержит модули, соединен-, ные между собой в ортогональных плоскостях напорными трубопроводами 7 и трубками 9 с напорными каналами из магнитомягкого материала с распределенными по длине высокочувствительU5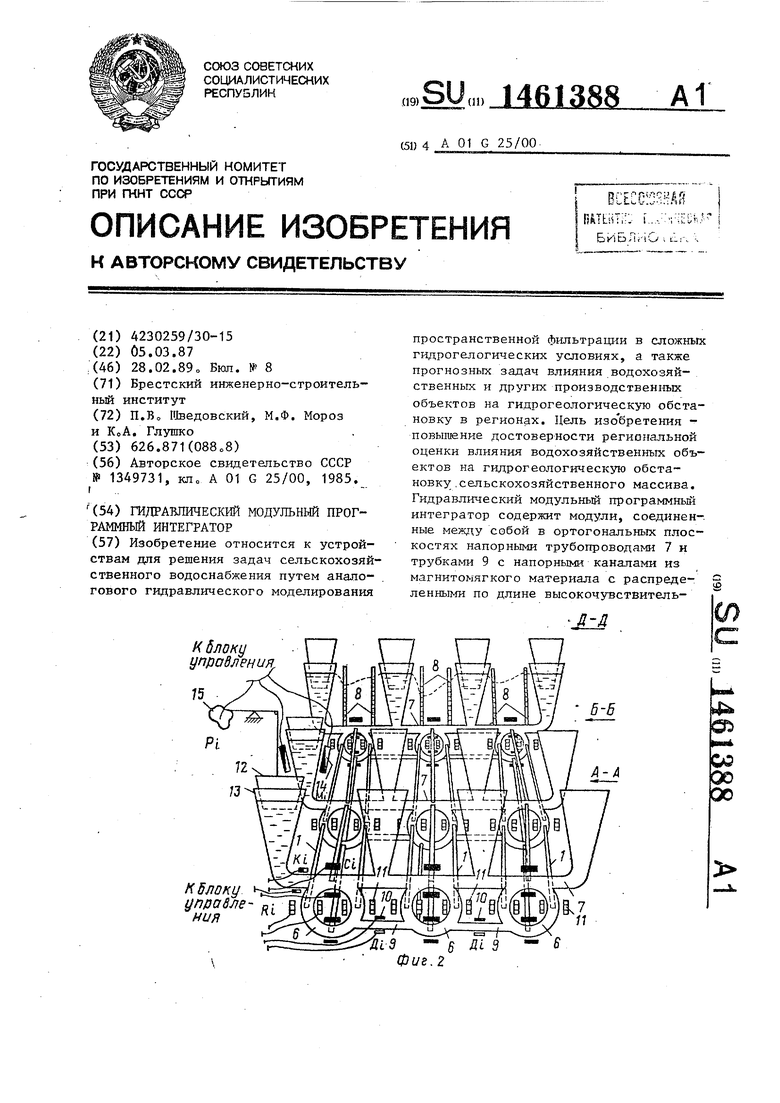
Фиг. 1
/I f.-.
, (S-iF
. л / t
15
Л
упрадмния
Фие. V
Ф.иг,5
Кизнеритем- Hotitf блоку
фис.7
/2
/3
3-ай модуль
2-ой модуль
-цй поду ль
с:з j
u
МКфАА А
Ъ°о°о
с
W/7
Физ.7
фиг. 6
ГО
| Гидравлический программный интегратор | 1985 |
|
SU1349731A1 |
| I ,. | |||
