Известны приборы для целей автоматизации работы дноуглубительных снарядов, в которых применены гироскопические компасы. Однако в этом случае передача импульсов производится контактно.
Описываемый датчик угла папильонирования для системы автоматического управления земснаряда обеспечивает надежность и точность показаний прибора и повышает его долговечность.
Это достигается тем, что он выполнен в виде магнитного компаса с бесконтактной сигнальной системой, включающей фото- и термоэлементы и управляемой лучом видимого или невидимого света, в основании которого вмонтирован зубчато-червячный корректор курса, допускающий изменение направления разрабатываемой прорези (трассы) без переналадки прибора.
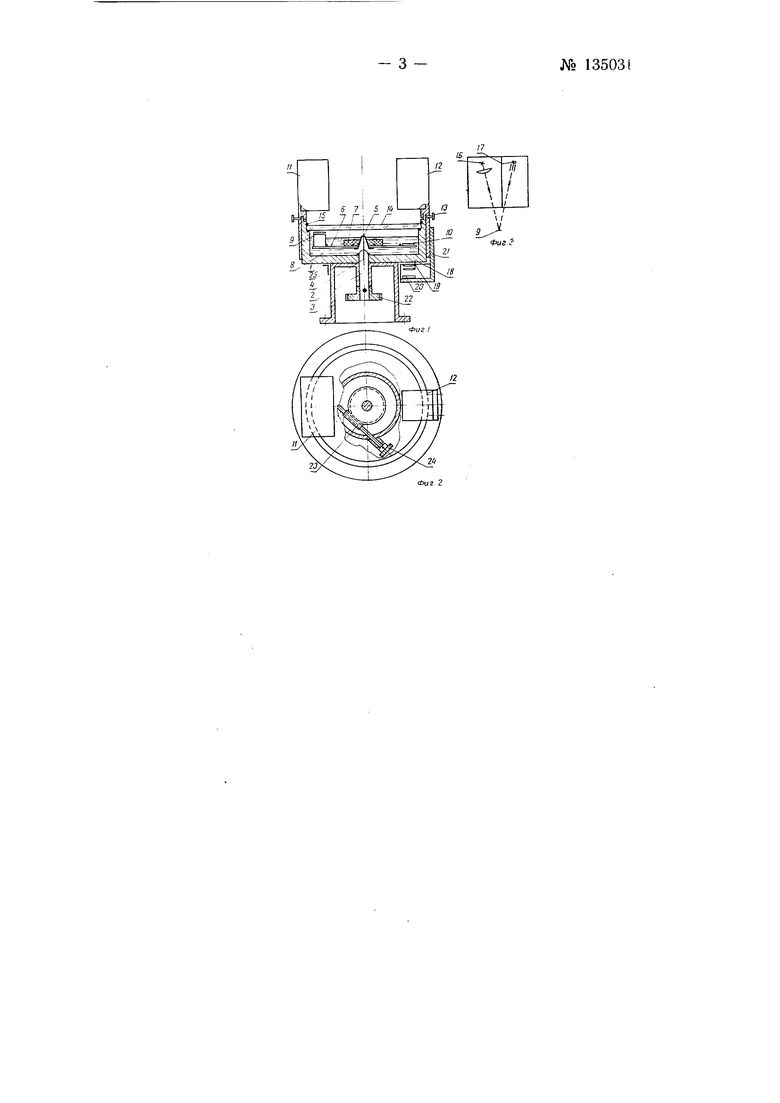
На фиг. 1 изображен схематически в осевом разрезе датчик угла папильонирования с сигнальной систел ой, слева с действием на отражение, а справа с действием на освещение; на фиг. 2 - то нее, в плане; на фиг. 3 - оптическая схема для сигнальной системы с действием ча отражение.
Заполненный жидкостью корпус / прибора посредством валика 2 монтируется на основании 3, и может вращаться вокруг него. В валик 2 запрессована игла 4, несущая подпятник 5 магнитной системы, которая включает в себя магнитные стержни 6 и поплавок 7.
По концам подвижной магнитной системы, свободно плавающей в жидкости 8, установлены над жидкостью два одинаковых зеркала 9 при сигнальной системе, действующей на отражение, или две непрозрачные пластинки 10 в случае применения сигнальной системы, действующей на освещение. В зависимости от выщеуказанных типов сигнальной системы, соответственно, на корпусе / крепятся одинаковые светильные
№ 135031- 2 головки 11 или 12, которые могут фиксироваться винтами 13 в любом положении по окружности корпуса /, закрытого герметично прозрачной крышкой 14, удерживаемой распорным кольцом 15.
Осветительные головки 11 или 12 устанавливаются иод равными углами к оси выработки. Когда земснаряд, папильонируя повернется на необходимый угол, луч света, исходящий от лампочки 16 и собираемый цилиндрической линзой, при действии сигнальной системы на отражение, отразится от зеркала 9 и попадет через ш,елевидную диафрагму на фотоэлемент 17, отчего сработает выходное реле прибора и иодается импульс в схему управления перекладкой свай. В случае использования на приборе сигнальной системы, действующей на освещение, при повороте земснаряда при папильонировании на необходимый угол. Непрозрачная заслонка 10 прервет луч света, идущий от осветительной головки 12 через прозрачное дно 18 корпуса 1 и щелевую диафрагму 19 на фотоэлемент 20, смонтированный в кожухе на скобе 21. Для обеспечения регулировки чувствительных элементов ири выдерживании курса земснаряда на криволинейных участках предусмотрен корректор курса, состоящий из косозубой щестерни 22, защтифтованной на валике 2, с которой сцеплен червячный винт 23. Вращением рукоятки 24 молсно доворачивать корпус 1 на нужный угол, не производя повторной настройки головки, если щирина выработки не изменилась.
Отсчет угла производится посредством прикрепленного к корпусу 1 визира 25.
Предмет изобретения
Датчик угла папильонирования для системы автоматического управления земснаряда, отличающийся тем, что, с целью повышения долговечности прибора, он выполнен в виде магнитного компаса с бесконтактной сигнальной системой, включающей фото- или термоэлементы и управляемой лучом видимого или невидимого света, в основание которого вмонтирован зубчато-червячный корректор курса, допускающий изменение направления разрабатываемой прорези (трассы) без переналадки прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрическое устройство для сигнализации о появлении дыма | 1941 |
|
SU74948A1 |
| Устройство для автоматического регулирования температуры печи и т.п. | 1929 |
|
SU13832A1 |
| Прибор для определения ров ноты пряжи, ленты, ровницы и т.п. | 1937 |
|
SU66565A1 |
| Устройство для измерения линейных размеров изделий | 1956 |
|
SU108694A1 |
| Устройство для сравнения интенсивностей двух световых потоков | 1956 |
|
SU106302A2 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Устройство для моделирования объектов сложной формы | 1946 |
|
SU81621A1 |
| Регистрирующий измерительный прибор | 1929 |
|
SU22807A1 |
| Магнитный компас карманного, ручного или т.п. типа | 1943 |
|
SU63351A1 |
| Магнитный компас, преимущественно переносного типа | 1943 |
|
SU63352A1 |