Предлагаемое изобретение касается уже известных устройств для автоматического управления механизмами машин-орудий и воспроизведения ими сложных движений, проделанных один раз принудительно и зарегистрированных на программном графике, нанесенном на движущейся поверхности, например, на барабане в виде бороздок или темной линии и служащем для управления движущими механизмами отдельных звеньев машины.
Согласно изобретению, для управления каждым движущим механизмом, в качестве которого используется гидравлический цилиндр, применено следящее компенсационное потенциометрическое устройство, состоящее из двух потенциометров - приемника и датчика и чувствительного реле. Потенциометр-датчик связан с программным графиком, потенциометр-приемник-с поршнем гидравлического цилиндра, а реле включено между движками потенциометров и служит для воздействия на золотник гидравлического цилиндра.
Следящее устройство для управления движущими механизмами выполнено, согласно изобретению, в нескольких вариантах, и его элементы, например, потенциометры даны в различных конструктивных формах выполнения.
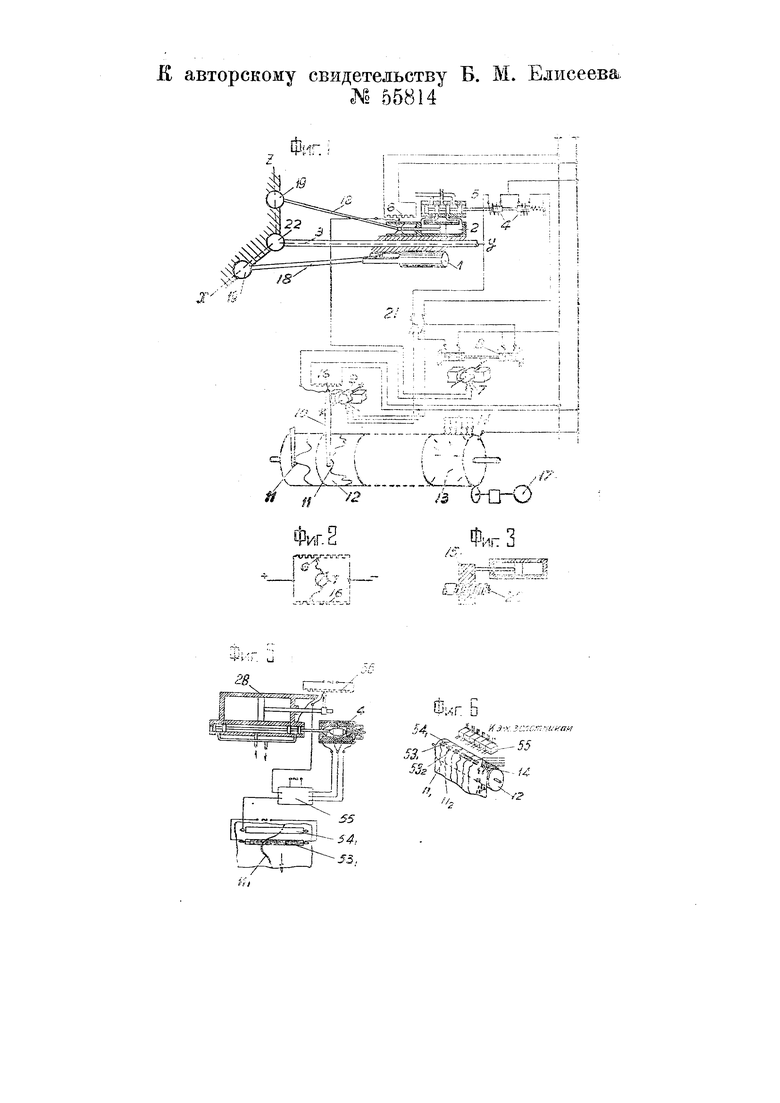
На чертеже фиг. 1 схематически изображает предлагаемое устройство; фиг. 2 - упрощенную схему включения реле; фиг. 3-вариант конструкции привода: фиг. 4 изображает более детально конструктивное выполнение одного из вариантов устройства; фиг. 5 - схему видоизмененного следящего устройства; фиг. 6 - общий вид барабана с программным графиком устройства по фиг. 5; фиг. 7- схему устройства для записи программного графика; фиг. 8 - схему следящего устройства с использованием сельсинов; фиг. 9 - схему следящего устройства с использованием фотоэлемента; фиг. 10 - вид сбоку части устройства по фиг. 9; фиг. 11 - вариант устройства для воспроизведения движений в случае электромоторного привода .головки
движения ; фиг, 12 и 13 - схемы включения сопротивлений в устройстве по фиг. 11; фиг. 14 - общий вид автоматического захватывающего приспособления для транспортируемых деталей; фиг. 15 -схему электрических соединений этого устройства; фиг. 16 - схему следящей системы устройства по фиг. 14.
Устройство предназначается главным образом для транспортирующих механизмов; так, например, оно может быть выполнено в виде автоматического мостового или рельсового крана, приводимого в движение электродвигателями или так называемой „механической руки, действующей от гидравлических цилиндров.
Управляемая часть устройства состоит из нескольких продолговатых звеньев (различной длины), связанных щарнирами, имеющими две степени свободы; движения в щарнирах производится под действием гидравлических цилиндров. Одно из крайних звеньев несет на себе приспособление для захвата деталей (изделий), например, электромагнит, клещи, присоски для пневматического захвата и т. д.
На фиг. 1 чертежа показаны одно звено и один шарнир с двумя движениями в плоскостях X-у и у - Z, расположенных под углом 90° Друг к другу.
Звено имеет основной стержень 3, связанный при помощи шарового карданного шарнира 22 с концом соседнего звена. К стержню 5 прикреплены два гидравлических цилиндра / и 2, порщни которых связаны с шатунами 18, имеющими на концах шаровые шарниры 19, 19, связанные с соседним звеном. При движении поршней в цилиндрах / и 2 стержень 5 поворачивается вокруг шарнира 22 и может отклоняться в любую сторону.
Движением поршня управляет золотник 5, регулирующий впуск масла в цилиндр, причем в золотнике должно быть обеспечено значительное падение давления, чтобы скорость поршня зависела от степени открытия отверстий золотника. Золотник удерживается в среднем положении пружиной и выводится из него электромагнитами 4, включенными последовательно с угольными столбами 8 поляризованного реле 7. К поршневому щтоку прикреплен движок потенциометра 6.
Движения всех шарниров регулируются программным графиком - барабаном 12, общим для всего устройства. На поверхности барабана имеются бороздки, число которых равно числу цилиндров. В каждой бороздке находится штифт // поворотной стрелки 10, который при вращении барабана от электродвигателя 17 поворачивает стрелку 10 и перемещает движок потенциометра 16 в соответствии с извилинами бороздки. Движок потенциометра 16 через обмотку поляризованного реле 7 соединен с движком потенциометра 6 и образует, таким образом, схему мостика Уитстона (фиг. 2).
Работа описанного устройства происходит следующим образом. При вращении барабана 12 движок потенциометра двигается соответственно извилинам бороздки на барабане и выводит мостик из равновесия; в диагонали мостика, т. е. в обмотке реле 7 при этом возникает ток, направление которого зависит от направления отклонения; подвижная система реле поворачивается в ту или в другую сторону и сжимает соответствующий угольный столбик 8, приводя этим самым в действие электромагнитный золотник 5, регулирующий движение поршня. Поршень приходит в движение и двигается до тех пор, пока не восстановится равновесие мостика, т. е. когда положение поршня будет соответствовать положению стрелки 10. у втоматическая компенсация (регулирование) при такой схеме будет происходить достаточно быстро.
Так как давление на угольные сто,1бики и, следовательно, отклонение золотника пропорциональны величине баланса мостика, то и скорость регулирования будет пропорциональна величине отклонения (отклонение от положения, соответствующего компенсации), что выгодно для процесса регулирования.
Для записи движений на барабан требуется переключить рубильник 21 в нижнее положение, тогда последовательно с угольными столбами будут включены две диференциальные обмотки на якоре 9, помещенном в сильное магнитное поле. Затем, сменив штифт 1 на резец (или увеличив давление штифта на барабан) и пустив барабан в движение, необходимо вручную проделать все движения, которые авто.матическое устройство должно будет воспроизводить (для того, чтобы можно было принудительно поворачивать шарниры, золотник должен быть сдвинут в крайнее положение и давление масла должно отсутствовать). При этом движок потенциометра 6 движется в соответствии с движениями шарнира и нарушает равновесие мостика. Реле 7, 8, регулирует ток в обмотках якоря 9, сидящего на обшей оси со стрелкой 10, и поворачивает его в положение, при котором с помощью потенциометра 16 равновесие мостика восстанавливается.
Для предотвращения колебаний при быстром регулировании якорь 9 может быть снабжен демпфером.
Для управления станком или другими механизмами, которые обслуживаются устройством, служат контакты 13, представляюшие собой металлические штифты, вставленные в поверхность барабана и замыкающиеся с контактами 14 в требуемые моменты цикла.
С помощью только что описанного устройства монсно управлять не только качающимися движениями в шарнирах, но и вращательным движением, например, с помощью гидравлического цилиндра, поршень которого соединен с гайкой 15, перемещаемой по многозаходному винту 20 (фиг. 3).
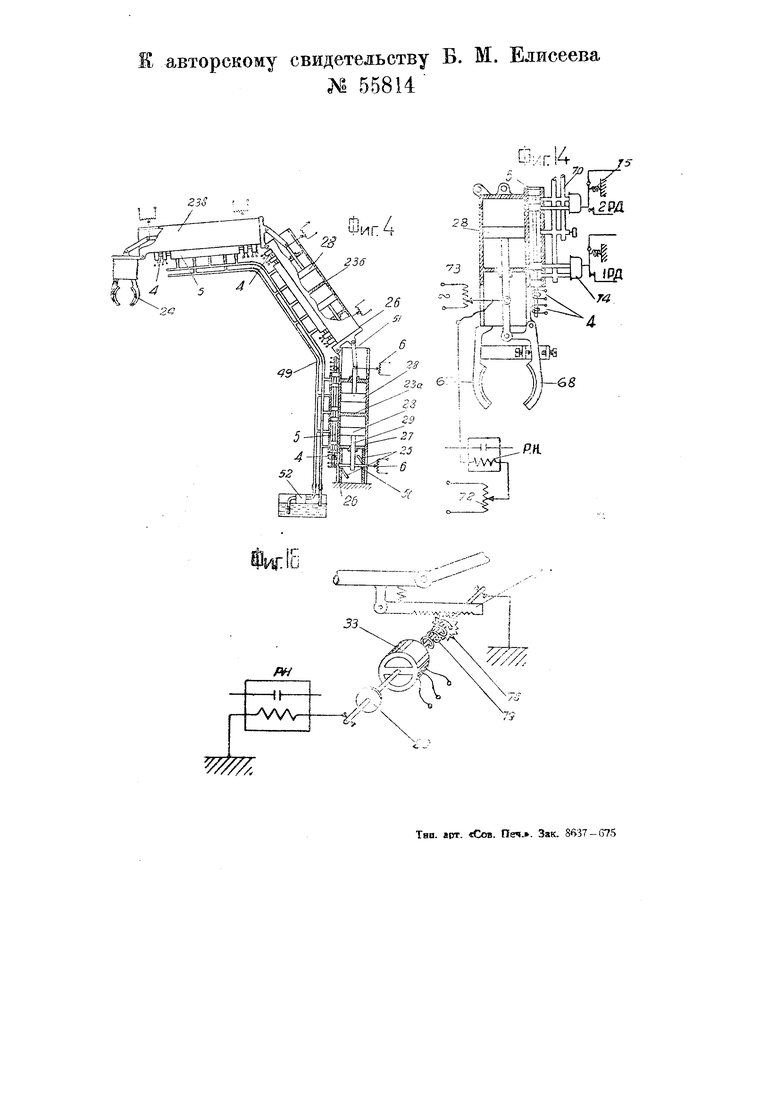
На фиг. 4 изображен более полно один из вариантов конструктивного выполнения устройства, так называемая „головка движения.
Головка движения состоит из трех звеньев 2Sa, 236, 28в и несет на своем конце захват 24 (электромагнит или
какое-либо другое приспособление) для держания транспортируемой детали. На неподвижной втулке 26 первого звена надет цилиндр 27, в котором находятся два порщня 28, 28. К концу щтока 29 первого поршня прикреплен палец 50, расположенный перпендикулярно к оси цилиндра. Концы пальца 50 входят в винтовые прорези 25 во втулке 26 и в продольные прорези в стенке цилиндра, вследствие чего при движении первого (нижнего) поршня происходит поворот цилиндра вокруг своей оси. Верхний поршень связан с тягой 51, сцепленной с приливом на втулке 26 второго звена 236. При движении этого поршня второе звено 236 поворачивается относительно первого (изменяется угол осями второго и первого звена).
Второе и третье звенья выполнены так же, как и первое звено.
Движение нижнего (первого) поршня второго звена вызывает поворот цилиндра второго звена вокруг своей оси, причем вместе с цилиндром второго звена поворачивается и третье звено, прикрепленное к нему. При движении верхнего поршня третье звено поворачивается относительно Еторогй и т. д.
Движения поршня так же, как и в устройстве по фиг. 1, управляются золотником 5, регулирующим впуск масла в цилиндр.
Масло подается к цилиндрам по трубкам, соединенным между собой в шарнирах головки гибкими шлангами 49. Устройство снабжено насосом 52, который может обслуживать несколько головок движения.
Устройство по фиг. 4 дает возможность получить движение с любой сложной траекторией; во многих случаях может оказаться достаточным использование одного или двух звеньев.
Как указывается в начале описания, следящие устройства могут быть выполнены различно.
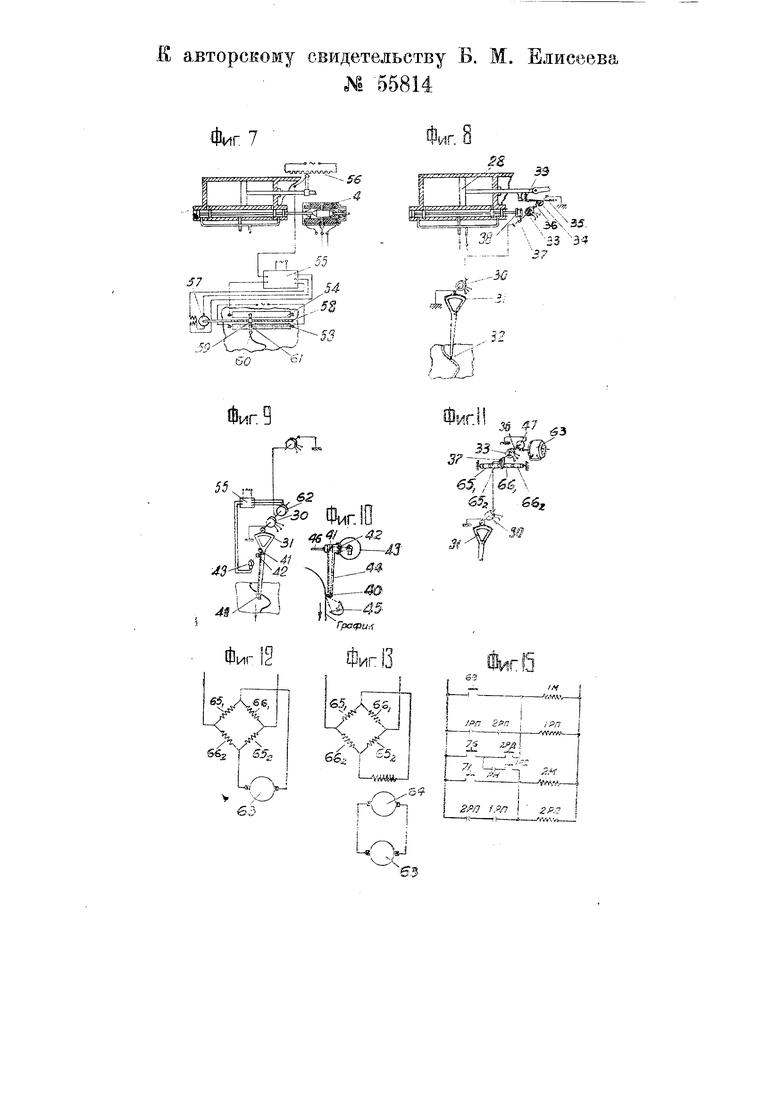
Второй вариант следящего устройства с потенциометрами приведен на фиг. 5-7. Здесь на поверхности вращающегося барабана 12 или на ленте из изолирующего материала, огибающей барабаи (фиг. 6), нанесены графики //1, llf и т. д. в виде проводящей линии, причем для каждого гидравлического цилиндра предусмотрена одна линия.
К барабану против каждой линии прижаты два валика, один из которых 55i (53., и т. д.) является потенциометром (выполнен из изолирующего материала и обмотан тонкой проволокой), а другой 54 (54,, и т. д.) металлический и служит для контакта с линией графика. Потенциометры соединены с усилителем 55, имеющим число секций, равное числу цилиндров. У правого конца барабана 12, где установлены неподвижные контактные щетки 14, служащие для включения и выключения обслуживаемых автоматом механизмов, лента из изолирующего материала снабжена перфорированными отверстиями, а поверхность барабана /.2 выполнена проводящей с тем, чтобы включение или выключение того или иного механизма происходило в тот момент, когда под соответствующей щеткой будет расположено отверстие в ленте.
Вход усилителя включен мегкду движком потенциометра 56 и валиком 54i. Когда положение поршня соответствует положению точки соприкосновения потенциометра 53, с проводящим графиком, то на входе усилителя напряжение отсутствует и катушки электромагнитного золотника не возбуждены; золотник удерживается в среднем положении пружинами, и доступ масла в цилиндр закрыт; когда ордината графика, двигающегося под потенциометром 53, изменится, и следовательно, точка соприкосновения этого потенциометра с графиком переместится, например, вправо, то на входе усилителя возникнет напряжение (напряжение передается через участок проводящего графика, находящийся между паликом 54 и потенциометром 55,) л в левой катушке электромагнита появится ток. Золотник передвинется влево, что вызовет перемещение поршня вправо; двинсение поршня прекратится тогда, когда он займет положение, соответствующее ординате графика. В случае отклонения графика влево, движение поршня будет происходить в обратнолс направлении.
Запись программного графика производится записывающим устройством (фиг. 7), в котором соответственно числу записываемых кривых имеются моторчики, работающие от следящей схемы, и двигающие перья. Во время записи программного графика, как указано выше, звенья головки приводятся в движение принудительно. Потенциометр 53 является в этом режиме датчиком. Следящее устройство непрерывно следит за согласованностью положения движка потенциометра 5о и записывающего пера и таким образом заставляет двигаться перо соответственно движению поршня. Когда движок потенциометра 56 сдвинется, например, вправо, то на входе усилителя появится напряжение, моторчик 57 начнет вращать винт 58 и сдвигать гайку 59 вправо; к гайке 59 прикреплены перо 60 и два металлических ролика .. Ролики 61 электрически соединены между собой и катятся один по валику 54, а другой по потенциометру 53. М-оторчик остановится, когда положение роликов 6/ на потенциометре 53 будет соответствовать положению движка потенциометра 56.
Программный график может быть двух типов: график, записанный проводящими чернилами, и проволочный график; достоинством первого является Ефостота изготовлепия и, следовательно, возможность регистрировать продолжительные циклы, а недостатком- малая прочность и поэтому непригодность для большого количества операций; достоинством второго являются большая надежность и износоустойчивость, однако для изготовления проволочного графика требуется сначала записать графи:; чернилами, а затем уложить по кривой проволоку. Наладка устройства в этом случае довольно сложна.
В третьем варианте следящего устройства (фиг. 8) вместо потенциометров применены сельсины.
На фиг. 8 изображена схема управления движениями одного цилиндра. В данном случае график вынолнен в виде нроволоки, намотанной ;ia барабан, по которой при вращеяии барабана катится ролик 32, прикрепленный к концу стрелки с зубчатым сектором 31, связанным при помощи шестеренки с сельсином 30. Поршень 28 связан с сельсином 33 при ПОМОШ.И зубчатой рейки 55, прижимаемой к шестеренке 34 пружиной 39; шестерня 34 сидит на валу свободно и связана с ротором сельсина через пружину 36. Статор сельсина 53 жестко связан с сухарем 57 лри ЦОМОШ.И оси, покоящейся на подшипниках, и следовательно, может поворачиваться на некоторый угол. Роторы сельсинов имеют однофазную обмотку и соединены друг с другом; трехфазные обмотки статоров присоединены к общей сети, Когда положение порщня соответствует положению стрелки, в проводе, соединяющем роторы сельсинов, ГОК не протекает, вращающие моменты отсутствуют и золотник занимает среднее положение, закрывая отзерстия для подачи масла в цилиндр.
Если под действием движущегося графика сектор 31 повернется, нааример, по часовой стрелке и сельсин 30 против часовой стрелки, то в сельсине 33 возникнет вращающий момент, поворачивающий ротор против часовой стрелки и стремящийся повернуть статор по часовой стрелке. При повороте статора по часовой стрелке сухарь 57 сдвигает золотник вправо, вследствие чего поршень, двигаясь влево, зубчатой рейкой поворачивает шестерню 34, связанную : ротором, против часовой стрелки; движение прекращается, как только положения поршня и сектора 31 будут согласованы.
При повороте сектора 31 н другую сторону действие происходит 3 обратном порядке. Пружина 36 служит для предотвращения выпадаНИН из синхронизма сельсина в случае, если движения поршня не по 1.:яевают за движениями сектора.
Запись графика производится по той же схеме, только ролик заменяется перо.м. При этом сельсины меняются ролями: при воспроизведении движений сельсин 30 является датчиком, а сельсин 55-ведомым, при записи датчиком является сельсин 55, а ведомым - сельсин 30.
При управлении по схеме, изображенной на фиг. 8, после записи графика по кривой последнего необходимо уложить проволоку.
В варианте с синхронной связью легко может быть применено воспроизведение движений непосредственно с записанной кривой при помощи фотоэлемента. Такое устройство позволит воспроизводить движения, записанные даже на очень длинной ленте. Примерная схема тагкого устройства изображена на фиг. 9 и 10. К оси 46 зубчатого сектора 31 прикреплена легкая трубка 44, в которой помещены два зеркала 40 и 41; против зеркала 41 расположена камера 43 (неподвижная) с фотоэлементом и линзой 42.
Поверхность, на которой нанесен график, освещается лампой 4о и отраженные лучи попадают на зеркало 40, затем на зеркало 41 и на фотоэлемент.
Фотоэлемент управляет усилителем 55, на выходе которого включен моторчик 62, сидящий на общем валу с сельсином 30; при средней освещенности фотоэлемента моторчик неподвижен, при больщой освещенности- вращается в одну сторону и при малой освещенности - в другую сторону. Фотоэлемент, таким образом, следит за линией графика и заставляет соответственно двигаться сектор 31 и связанный с ним сельсин-датчик.
Использование фотоэлементов возможно также и в устройстве по фиг. 1. Там применяются два фотоэлемента, следящие за линией графика; при отклонении линии графика один из фотоэлементов освещается сильнее и через усилитель приводит в движение фонарь с фотоэлементами, устанавливая его точно над линией. С фонарем связывается потенциометр-датчик 16.
Система с синхронно следящим устройством позволяет также осуществить запись и воспроизведение движений и в случае электромоторного привода голов; и движений (фиг. И). Сельсин 55 в этом случае соединен через пружину и редуктор 47 с валом приводного электродвигателя 6S. Сухарь 57, связанный с поворотным статором сельсина 55, при повороте статора сжимает правые или левые угольные столбики 65, 65 и 66, 66, состоящие из тонких угольных шайб. Запись графика производится при постороннем (ручном) управлении электродвигателем 63.
При воспроизведении движений действие схемы происходит так же, как в схе.аде фиг. 8, с той лишь разницей, что сухарь 57 воздействует не на золотник, а на угольные столбики, управляющие работой приводного мотора. Угольные столбики соединены по схеме моста (фиг. 12), в диагональ которого включен двигатель 63 или обмотка возбуждения генератора 84 Леонарда, питающего двигатель 63 (фиг. 13).
Для самых легких работ может быть при.менена головка движений, в которой двигателями являются сами сельсины. В этом случае схема управления дви.жениями будет соответствовать изображенной на фиг. 9; энергия будет передаваться головке движепий через синхронную связь, от моторчика 62.
На фиг. 14 изображен общий вид автоматического захватывающего приспособления для транспортируемых деталей, работающего от гидравлического цилиндра. Гидравлический цилиндр по конструкции соверщенгю аналогичен цилиндрам гидравлической „механической руки (фиг. 4). К цилиндру прикреплена неподвижная лапа 67 и подвижная лапа об, вращающаяся на шарнире. Форма лап может быть различной в зависимости от рода захватывгемых деталей; при движении поршня 28 лапа 68 поворачивается, причем движение ее ограничивается регулируемыми упорами. Изображенный на фиг. 14 автоматический захват снабжен устройством, которое прекращает его работу только в том случае, если между лапами будет находиться деталь соответствующих размеров; таким образом, захват как-бы нащупывает деталь. Действие захвата происходит следующим образом (фиг. 15). При нажатии кнопки 69 („захват) возбуждается катушка 1М электромагнита 4, передвигающая золотник 5 вниз; реле 1РП, включенное параллельно с катушкой 1Л1 замыкает свои контакты }РП, вследствие чего катушка 1М, остается включенной и после отпускания кнопки 69. Масло из напорной трубы 7G поступает под поршень и сближает лапы 67 и 68, зажимая уежду ними деталь.
При нажатии кнопки 71 („отпускание) возбуждаются катушка 2f/i электромагнита 4 и реле 2РП; последнее рвет цепь катушки 1М к золотник 5 передвигается вверх; поршень при зтом двигается вниз., освобождая деталь. Для нашупывания детали служит потенциометр 72 с движком, переставляемым от рукк потенциометр 75, связанный с поршнем, реле песогласования РН, контакт которого разомкнут только при пололсении поршня, согласованном с полол ением двпжкп. потенциометра 72, и, наконец, два реле давления- 1РД и 2РД, соединенные с нчжпей и верхней полостями цилиндра; реле давления состоит из клапана 74, связанного с контактом реле 1РД (или 2РД) и прижи:/1аемогск седлу пружиной 75. Если чосле нажатия кнопки 69 („захват) будет длительно нажата кнопка 76 („возвратное движение), то, в случае несоответствия размеров детали требуемым размерам, лапа 68, не встречая сопротивления, дойдет до упора. При этом увеличится давление под поршнем и реле 1РД замкнет свои контакты; так как коктакты реле РН при этом замкнуты (в виду несогласования потенциометров 72 к 75), то возбудится катушка 2М и реле 2РП; последнее разорвет цепь катушки /Л и золотник передвинется вверх, что вызовет разжатие лап. При разжатии лап до упора, замкнутся контакты реле 2РД к цикл захвата повтуPHTCS.
Когда между лапами окажется деталь требуемых размеров, контакты реле РН будут разомкнуты и лапы будут оставаться сжатыми до нажатия кнопки 71 („отпускание).
На фиг. 16 показана схема включения автоматического захвата при применении варианта с синхронной связью.
С зубчатой рейкой 77 сцеплена шестерня 78, свободно сидяш;ая на валике и через пружину 79 соединенная с ротором сельсина 55; статор сельсина может быть повернут от руки в любое положение при помощи шайбы 80. Обмотка ротора включена последовательно с обмоткой реле РН и подключена к сети яеременного тока. В обмотке реле протекает ток лишь при наличии вращающего момента на роторе сельсина, т. е. когда закручена пружина 79; при различных положениях статора сельсина реле РН будет размыкать свои контакты соответственно различным положениям поршня. В остальном работа устройства совершенно аналогична работе вышеописанного устройства с потенциометрами.
Кнопки, указанные в схеме по фиг. 15, при автоматическом зоспроизведении движений заменяются контактами на программном графике.
Точность воспроизведения движений устройством при нормальном исполнении должна быть порядка 0,5-f-l,0% от полного перемещения; следовательно при полном перемещении захвата на 1 ж возможные неточности движений будут 5 + 10 мм, .в случае автоматического крана (для тяжелых работ) с перемещением в 10 м возможные неточности будут 50-|-100 мм. Во многих случаях такие неточности могут быть допустимы, например, при взятии деталей с конвейера, при закреплении деталей в самоцентрирующем патроне (при условии упругого прижима детали к патрону) и пр.; в остальных случаях могут быть применены направляющие рейки, воронки и т. п., пристроенные к станку; так, например, при передаче заготовок в штамповочный пресс требуется, чтобы заготовка точно вошла в отверстие штампа; если перед отверстием штампа пристроить направляющую рейку, то деталь, подаваемая в штамп даже при наличии неточности 5-10 мм, точно будет направлена в отверстие штампа направляющей рейкой.
Автор указывает, что предлагаемое устройство быть использовано в поточном производстве, например, для обслуживания револьверного станка и выполняет следующие операции: 1) взятие заготовки с конвейера гидравлическим захватом; 2) установка в патрон; 3) включение зажима изделия; 4) пуск станка и включение подачи; 5) отвод инструмента; 6) поворот револьверной головки; 7J включение подачи; 8) отвод инструмента; 9) захват детали и выключение зажима изделия; 10) перенос детали на конвейер или на следующий станок.
При использовании для обслуживания тяжелого токарного станка устройство выполняется в виде автоматического крана с электромоторным приводом и выполняет следующие операции: 1) захват заготовки, лежащей на конвейере; 2) подъем; 3) транспортировка к станку; 4) опускание до линии центров станка; 5) подача к патрону; 6) включение зажима изделия; 7) пуск станка и т. д.
Для того, чтобы заготовки находились на определенном месте в момент взятия их захватом, можно предусмотреть упорную рейку над конвейером, останавливающую деталь.
Устройства, работающие на поточной линии, должны быть синхронизированы; при этом программные графики могут или двигаться непрерывно или периодически останавливаться. В случае неправильных движений во избежание поломок должна срабатывать защита, останавливающая устройство и дающая сигнал о неисправности.
Предмет изобретения.
1. Устройство для азто.матического управления механизмами .машинорудий с использованием копиров в виде графиков, нанесенных борозднами или темной линией на движущейся поверхности, управляющих работой гидравлических цилиндров отдельных звеньев машины, отличающееся тем, что для управления каждым гидравлическим цилиндром применено следящее компенсационное потенциометрическое устройство, состоящее из потенциометра-датчика 16, связанного с программным графиком, потенциометра-приемника в, связанного с поршнем гидравлического цилиндра, и чувствительного реле 7, 8, включенного между движками потенциометров и воздействующего на золотник гидравлического цилиндра.
2. Видоизменение устройства л о и. 1., отличающееся тем, что в соответствии с графиком, выполненным в виде проволоки, намотанной на барабан, применен ролик, катящийся по проволоке, поворачивающий зубчатый сектор с сцепленным с ним сольсином, в то время как другой, воспринимающий сельсин, снабжен ротором, связанным с движением порщня, и поворотным статором, управляющим золотником.
3.Видоизменение устройства пс. п. 2, отличающееся тем, что ротор воспринимающего сельсина связан через редуктор с двигателем „головки движения, а со статором связаны угольные столбики, управляющие приводным электродвигателем.
4.В устройстве ло п. 1 применение автоматического захватывающего приспособления для транспортирования обрабатываемых изделий, работающего при посредстве гидравлического цилиндра с подвижной и неподвижной лапами и снабженного двумя реле давления, соединенными с двумя полостями цилиндра, управляемого при помощи потенциометрического устройства, регулирующего установку захватывающего приспособления на размер детали.
5.В устройстве по п. 1 выполнение одного КЗ потенциометров, не связанного с движением гидравлического порщня, в виде валика, катящегося но программному графику, выполненному ввиде токопроводящей линии на непроводящей поверхности. я авторскому свидетельству Б.
-ь
ФИГ; № 55814
|й -1 рмйт.1Дй %---
Ьш&й- н S yyaisibМ. Елисеева
b
52-1) авторскому свидетельству Б. М. Елисеева
Фиг 7
№ -55814
W.
Фиг.д
м
Фиг и
.J/
-5/ «мдак-л
1;: 45Графил
13
4AJ
.СГ I
б5, 65J й
.зА
-VjWtiilr-J
,6
rw
.ГЛ j
вз Е авторскому свидетельству Б. № 55814
б,; г 14 М. Елисеева